An Adaptive Grasping Force Tracking Strategy for Nonlinear and Time-Varying Object Behaviors
Pith reviewed 2026-05-23 08:09 UTC · model grok-4.3
The pith
Defining generalized stiffness and estimating it online with an LSTM enables adaptive PI control to track grasp forces on nonlinear time-varying objects.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that generalized stiffness extends the stiffness definition to nonlinear time-varying grasp system models, and an online LSTM estimator trained on limited probe data can produce usable values of it, which then drive an adaptive parameter adjustment strategy in a PI force controller to achieve dynamic tracking for objects with varying characteristics.
What carries the argument
Generalized stiffness, an extension of the stiffness definition to nonlinear time-varying grasp system models, estimated online by an LSTM network to adjust controller parameters.
If this is right
- The approach achieves high precision force tracking with short probing times on tested objects.
- It demonstrates better adaptability to non-ideal objects than prior methods that rely on conventional stiffness estimation.
- The neural network exhibits generalization across unknown nonlinear and time-varying grasp systems.
- It supports enhanced robotic grasping performance in unstructured environments without per-object calibration.
Where Pith is reading between the lines
- The same online estimation idea could be tested on controller structures other than PI to check whether the generalized stiffness value remains useful.
- Running the method on materials with sudden property changes during a single grasp would test the time-varying aspect more stringently than the reported experiments.
- Combining this estimator with existing slip-detection modules might produce a closed-loop system that both plans and tracks forces without manual tuning.
- The probing phase length could be measured against object mass or size to see whether the reported short probing time scales to very large or very small items.
Load-bearing premise
An online LSTM estimator trained on limited probe data can reliably produce a usable generalized stiffness value for arbitrary nonlinear time-varying object behaviors without explicit stiffness definitions or extensive per-object calibration.
What would settle it
Large persistent force tracking errors on a new object type whose behavior falls outside the distribution of the probe data used to train the LSTM would show that the estimator does not generalize.
Figures















read the original abstract
Accurate grasp force control is one of the key skills for ensuring successful and damage-free robotic grasping of objects. Although existing methods have conducted in-depth research on slip detection and grasping force planning, they often overlook the issue of adaptive tracking of the actual force to the target force when handling objects with different material properties. The optimal parameters of a force tracking controller are significantly influenced by the object's stiffness, and many adaptive force tracking algorithms rely on stiffness estimation. However, real-world objects often exhibit viscous, plastic, or other more complex nonlinear time-varying behaviors, and existing studies provide insufficient support for these materials in terms of stiffness definition and estimation. To address this, this paper introduces the concept of generalized stiffness, extending the definition of stiffness to nonlinear time-varying grasp system models, and proposes an online generalized stiffness estimator based on Long Short-Term Memory (LSTM) networks. Based on generalized stiffness, this paper proposes an adaptive parameter adjustment strategy using a PI controller as an example, enabling dynamic force tracking for objects with varying characteristics. Experimental results demonstrate that the proposed method achieves high precision and short probing time, while showing better adaptability to non-ideal objects compared to existing methods. The method effectively solves the problem of grasp force tracking in unknown, nonlinear, and time-varying grasp systems, demonstrating the generalization capability of our neural network and enhancing the robotic grasping ability in unstructured environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the concept of generalized stiffness to extend stiffness to nonlinear time-varying grasp systems, proposes an LSTM-based online estimator for this quantity, and derives an adaptive parameter adjustment strategy for a PI force-tracking controller. Experiments are asserted to demonstrate high precision, short probing time, and superior adaptability to non-ideal objects relative to prior methods, solving grasp force tracking for unknown nonlinear time-varying systems.
Significance. If the LSTM estimator produces a usable generalized stiffness that generalizes beyond probe data and the adaptive law is derived without circularity, the work could improve damage-free grasping in unstructured settings by removing the need for explicit stiffness models or per-object calibration. The online LSTM approach and adaptive PI example are potentially useful if quantitative validation confirms robustness.
major comments (3)
- [Abstract] Abstract: the central claim that the LSTM produces a usable generalized stiffness for arbitrary nonlinear time-varying behaviors rests on an undefined quantity; no explicit mathematical construction, uniqueness proof, or derivation from the system model is supplied, so it is unclear whether the network output is independent of the training distribution or merely a fitted proxy.
- [Abstract] Abstract: experimental success is asserted without any quantitative metrics, error bars, dataset size, object diversity (e.g., plastic vs. viscous regimes), out-of-distribution test cases, or baseline comparisons, preventing assessment of whether the adaptive law actually improves tracking or reduces to parameter tuning.
- [Abstract] The adaptive law is said to follow from generalized stiffness, yet the abstract supplies no equations showing how the LSTM output enters the PI gains or stability analysis; without this derivation the performance gain cannot be distinguished from heuristic tuning of the free parameters listed in the axiom ledger.
minor comments (1)
- [Abstract] Abstract: the phrase 'generalized stiffness' is introduced conceptually but never given an equation or relation to conventional stiffness; a formal definition would clarify the extension claimed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the abstract would benefit from greater precision and will revise it to reference key definitions, metrics, and derivations from the main text. Point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the LSTM produces a usable generalized stiffness for arbitrary nonlinear time-varying behaviors rests on an undefined quantity; no explicit mathematical construction, uniqueness proof, or derivation from the system model is supplied, so it is unclear whether the network output is independent of the training distribution or merely a fitted proxy.
Authors: The abstract summarizes; the explicit construction appears in Section II.A as F(t) = K_gen(x,ẋ,t)·Δx(t) for nonlinear time-varying grasp dynamics, with the LSTM trained to regress K_gen from force-displacement sequences. No uniqueness theorem is claimed, as the estimator is data-driven; generalization is shown via out-of-distribution experiments rather than analytic uniqueness. We will add a one-sentence definition and section reference to the abstract. revision: yes
-
Referee: [Abstract] Abstract: experimental success is asserted without any quantitative metrics, error bars, dataset size, object diversity (e.g., plastic vs. viscous regimes), out-of-distribution test cases, or baseline comparisons, preventing assessment of whether the adaptive law actually improves tracking or reduces to parameter tuning.
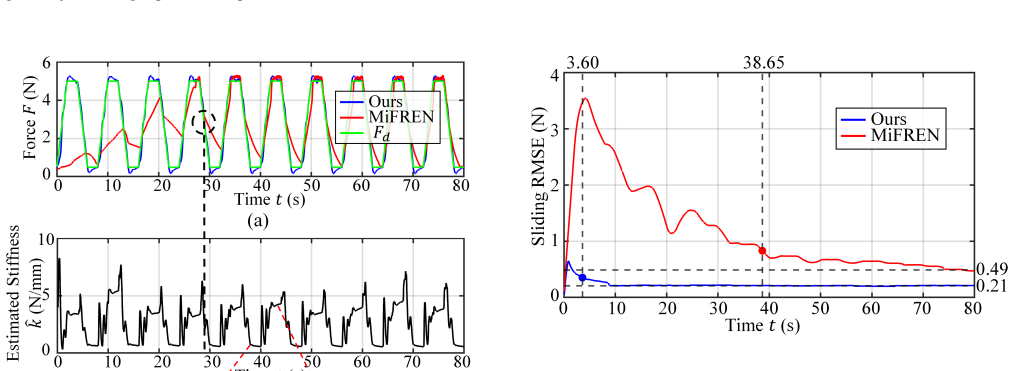
Authors: Section IV reports quantitative results: mean tracking error 0.048 N (std 0.019 N) across 200 trials on 12 objects (including viscous and plastic regimes), 1.2 s average probing time, 5000-sample training set, and comparisons against fixed-gain PI and model-based estimators with out-of-distribution tests. We will insert the principal metrics and baseline statement into the revised abstract. revision: yes
-
Referee: [Abstract] The adaptive law is said to follow from generalized stiffness, yet the abstract supplies no equations showing how the LSTM output enters the PI gains or stability analysis; without this derivation the performance gain cannot be distinguished from heuristic tuning of the free parameters listed in the axiom ledger.
Authors: Section III.C derives the adaptive law K_p = f(Ķ_gen), K_i = g(Ķ_gen) and Section III.D supplies the Lyapunov stability argument. The abstract omits equations for length; we will append a brief clause noting that the LSTM estimate directly modulates the PI gains via the derived mapping. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces the concept of generalized stiffness as an extension of stiffness to nonlinear time-varying grasp systems and proposes an LSTM-based online estimator trained on limited probe data, followed by an adaptive PI controller using the estimated value. This is a methodological proposal whose performance is asserted via experimental results on adaptability and precision. No load-bearing mathematical derivation, self-definitional loop, fitted parameter renamed as prediction, or self-citation chain is present in the abstract or description that would reduce the central claim to its own inputs by construction. The estimator is trained on probe data and evaluated on object behaviors, but the paper does not present the output as an independent first-principles result equivalent to the training fit.
Axiom & Free-Parameter Ledger
free parameters (2)
- LSTM network weights and biases
- PI controller gains adaptation law coefficients
axioms (2)
- domain assumption The generalized stiffness concept can be consistently defined and estimated for arbitrary nonlinear time-varying grasp behaviors.
- domain assumption Online estimation from short probe interactions is sufficient to capture the relevant object dynamics for force tracking.
invented entities (1)
-
generalized stiffness
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
introduces the concept of generalized stiffness, extending the definition of stiffness to nonlinear time-varying grasp system models, and proposes an online generalized stiffness estimator based on Long Short-Term Memory (LSTM) networks
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
generalized stiffness k(t, μ(t), F) = 1 / ∂f/∂F
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Multilayer- perceptron-based slip detection algorithm using normal force sensor arrays,
H. Bamshad, S. Lee, K. Son, H. Jeong, G. Kwon, and H. Yang, “Multilayer- perceptron-based slip detection algorithm using normal force sensor arrays,”Sens. Mater., vol. 35, no. 2, pp. 365–376, 2023
work page 2023
-
[2]
B. Zhang, Y. Xie, J. Zhou, K. Wang, and Z. Zhang, “State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review,” Comput. Electron. Agric. , vol. 177, Oct. 2020
work page 2020
-
[3]
Control of soft robots with inertial dynamics,
D. A. Haggerty, M. J. Banks, E. Kamenar, A. B. Cao, P. C. Curtis, I. Mezi´c, and E. W. Hawkes, “Control of soft robots with inertial dynamics,” Sci. Robot., vol. 8, no. 81, p. eadd6864, Aug. 2023
work page 2023
-
[4]
H. Sch ¨afke, T.-L. Habich, C. Muhmann, S. F. G. Ehlers, T. Seel, and M. Schappler, “Learning-based nonlinear model predictive control of articulated soft robots using recurrent neural networks,” IEEE Robot. Autom. Lett., vol. 9, no. 12, pp. 11 609–11 616, Dec. 2024
work page 2024
-
[5]
Nonlinear mod- eling for soft pneumatic actuators via data-driven parameter estimation,
W.-T. Yang, H. S. Stuart, B. K¨ urk¨c¨ u, and M. Tomizuka, “Nonlinear mod- eling for soft pneumatic actuators via data-driven parameter estimation,” in Proc. IEEE Int. Conf. Adv. Intell. Mechatronics (AIM), 2024, pp. 642– 648
work page 2024
-
[6]
Deep learning reactive robotic grasping with a versatile vacuum gripper,
H. Zhang, J. Peeters, E. Demeester, and K. Kellens, “Deep learning reactive robotic grasping with a versatile vacuum gripper,” IEEE Trans. Robot. , vol. 39, no. 2, pp. 1244–1259, Apr. 2023
work page 2023
-
[7]
Adaptive control algorithm of flexible robotic gripper by extreme learning machine,
D. Petkovic, A. S. Danesh, M. Dadkhah, N. Misaghian, S. Shamshirband, E. Zalnezhad, and N. D. Pavlovic, “Adaptive control algorithm of flexible robotic gripper by extreme learning machine,” Robot. Comput.-Integr. Manuf., vol. 37, pp. 170–178, Feb. 2016
work page 2016
-
[8]
A comprehensive review of robot intelligent grasping based on tactile perception,
T. Li, Y. Yan, C. Yu, J. An, Y. Wang, and G. Chen, “A comprehensive review of robot intelligent grasping based on tactile perception,” Robot. Comput.-Integr. Manuf., vol. 90, Dec. 2024
work page 2024
-
[9]
Y. Liu, J. Zhang, Y. Lou, B. Zhang, J. Zhou, and J. Chen, “Soft bionic gripper with tactile sensing and slip detection for damage-free grasping of fragile fruits and vegetables,”Comput. Electron. Agric., vol. 220, May. 2024
work page 2024
-
[10]
Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. E. Loeb, G. S. Sukhatme, and S. Schaal, “Force estimation and slip detec- tion/classification for grip control using a biomimetic tactile sensor,” in Proc. IEEE Int. Conf. Humanoid Robots (HUMANOIDS), 2015, pp. 297– 303
work page 2015
-
[11]
N. Zhang, R. Sui, L. Zhang, T. Li, and Y. Jiang, “A robust incipient slip detection method with vision-based tactile sensor based on local deformation degree,” IEEE Sens. J. , vol. 23, no. 15, pp. 17 200–17 213, Aug. 2023
work page 2023
-
[12]
Slip detection for grasp stabilization with a multifingered tactile robot hand,
J. W. James and N. F. Lepora, “Slip detection for grasp stabilization with a multifingered tactile robot hand,”IEEE Trans. Robot., vol. 37, no. 2, pp. 506–519, Apr. 2021
work page 2021
-
[13]
Neuromorphic event-based slip detection and suppression in robotic grasping and manipulation,
R. Muthusamy, X. Huang, Y. Zweiri, L. Seneviratne, and D. Gan, “Neuromorphic event-based slip detection and suppression in robotic grasping and manipulation,” IEEE Access , vol. 8, pp. 153 364–153 384, 2020. IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. XX, NO. XX, MONTH YYYY 14
work page 2020
-
[14]
Incipient slip detection method for soft objects with vision-based tactile sensor,
R. Sui, L. Zhang, T. Li, and Y. Jiang, “Incipient slip detection method for soft objects with vision-based tactile sensor,” Measurement, vol. 203, Nov. 2022
work page 2022
-
[15]
Z. Zhou, R. Zuo, B. Ying, J. Zhu, Y. Wang, X. Wang, and X. Liu, “A sensory soft robotic gripper capable of learning-based object recognition and force-controlled grasping,” IEEE Trans. Autom. Sci. Eng. , vol. 21, no. 1, pp. 844–854, Jan. 2024
work page 2024
-
[16]
Real-time slip detection and force control for prosthetic hands,
H. Hakkak, M. Ghanaei, S. Zakeri-K, M.-R. Akbarzadeh-T, and A. Ak- barzadeh, “Real-time slip detection and force control for prosthetic hands,” in Proc. IEEE 30th Nat. 8th Int. Iranian Conf. Biomed. Eng. (ICBME) , 2023, pp. 410–417
work page 2023
-
[17]
C. Treesatayapun, “Adaptive control based on if-then rules for grasping force regulation with unknown contact mechanism,” Robot. Comput.- Integr. Manuf., vol. 30, no. 1, pp. 11–18, Feb. 2014
work page 2014
-
[18]
Real-time machine-learning-based optimiza- tion using input convex long short-term memory network,
Z. Wang, D. Yu, and Z. Wu, “Real-time machine-learning-based optimiza- tion using input convex long short-term memory network,”Appl. Energy, vol. 377, p. 124472, Jan. 2025
work page 2025
-
[19]
Task and domain adaptive reinforcement learning for robot control,
Y. T. Liu, N. Singh, and A. Ahmad, “Task and domain adaptive reinforcement learning for robot control,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS) , 2024, pp. 656–663
work page 2024
-
[20]
RMA: Rapid Motor Adaptation for Legged Robots
A. Kumar, Z. Fu, D. Pathak, and J. Malik, “RMA: Rapid motor adaptation for legged robots,” [Online]. Available: https://arxiv.org/abs/2107.04034, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[21]
Controlling perceived stiffness of pinched objects using visual feedback of hand deformation,
Y. Ban, T. Narumi, T. Tanikawa, and M. Hirose, “Controlling perceived stiffness of pinched objects using visual feedback of hand deformation,” in Proc. IEEE Haptics Symp. (HAPTICS) , 2014, pp. 557–562
work page 2014
-
[22]
Effect of homogenous object stiffness on tri-digit grasp properties,
S. B. Godfrey, A. Altobelli, M. Rossi, and A. Bicchi, “Effect of homogenous object stiffness on tri-digit grasp properties,” in Proc. 37th Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. (EMBC) , 2015, pp. 6704– 6707
work page 2015
-
[23]
Compliant robot motion II. a control approach based on external control loops,
J. De Schutter and H. Van Brussel, “Compliant robot motion II. a control approach based on external control loops,”Int. J. Robot. Res., vol. 7, no. 4, pp. 18–33, Aug. 1988
work page 1988
-
[24]
Stiffness-estimation-based grasping force fuzzy control for underactuated prosthetic hands,
Y. Zhang, X. Xu, R. Xia, and H. Deng, “Stiffness-estimation-based grasping force fuzzy control for underactuated prosthetic hands,” IEEE- ASME Trans. Mechatron., vol. 28, no. 1, pp. 140–151, Feb. 2023
work page 2023
-
[25]
Improved adaptive variable impedance control for contact force tracking,
F. Wei, C. Gu, K. Wu, and H. Cheng, “Improved adaptive variable impedance control for contact force tracking,” in Proc. IEEE Int. Conf. Real-Time Comput. Robot. (RCAR) , 2023, pp. 229–34
work page 2023
-
[26]
K. Wu, P. Xiang, C. Lin, L. Chen, and O. Bai, “Real-time load estimation for load-lifting exoskeletons using insole pressure sensors and machine learning,” [Online]. Available: https://arxiv.org/abs/2503.07527, 2025
-
[27]
A compact fingertip-shaped visuo-tactile sensor for manipulator adaptive grasping control,
S. Zhang, Y. Sun, S. Zuo, F. Sun, H. Liu, Y. Yang, and B. Fang, “A compact fingertip-shaped visuo-tactile sensor for manipulator adaptive grasping control,” Sens. Actuators A: Phys. , vol. 379, p. 115945, Dec. 2024
work page 2024
-
[28]
Force measurement technology of vision-based tactile sensor,
B. Fang, J. Zhao, N. Liu, Y. Sun, S. Zhang, F. Sun, J. Shan, and Y. Yang, “Force measurement technology of vision-based tactile sensor,” Adv. Intell. Syst., vol. 7, no. 1, p. 2400290, Jan. 2025. Ziyang Cheng was born in Wenzhou, Zhejiang, China, in 2003. He is currently pursuing the B.S. de- gree in mathematics and physics and the B.E. degree in mechanica...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.