Real-World Deployment of a Lane Change Prediction Architecture Based on Knowledge Graph Embeddings and Bayesian Inference
Pith reviewed 2026-05-22 01:22 UTC · model grok-4.3
The pith
A lane change prediction system based on knowledge graph embeddings and Bayesian inference anticipates target maneuvers three to four seconds ahead during real hardware tests.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
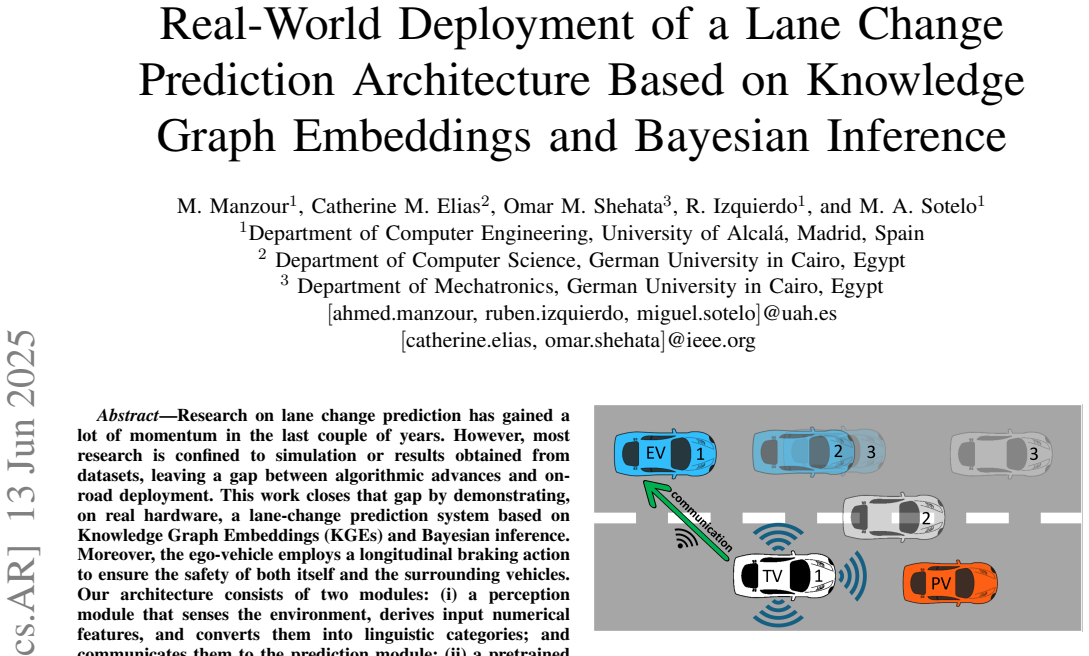
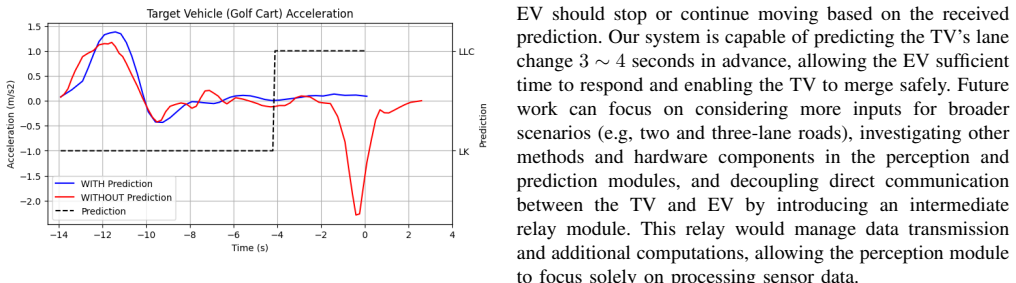
The authors establish through on-road hardware experiments that their two-module system anticipates a target vehicle's lane change three to four seconds before execution. The perception module extracts numerical features from the environment and maps them to linguistic categories; the prediction module then applies a pretrained knowledge graph embedding model together with Bayesian inference to determine the maneuver probability and issues a braking command. This timing supplies the ego vehicle with sufficient reaction margin while allowing the target vehicle to complete the lane change without conflict.
What carries the argument
A modular pipeline in which a perception module converts sensor-derived numerical features into linguistic categories that feed a pretrained knowledge graph embedding model combined with Bayesian inference to produce maneuver predictions and braking actions.
If this is right
- The ego vehicle can initiate a longitudinal braking action in time to maintain safe distances.
- The target vehicle completes its lane change without requiring evasive action from others.
- The architecture functions on physical hardware under actual traffic conditions rather than only in simulation.
- Separation of perception and prediction modules supports incremental updates or sensor swaps.
Where Pith is reading between the lines
- The linguistic category step may allow human operators to inspect and correct misclassified inputs more readily than opaque feature vectors.
- The same embedding-plus-inference pattern could be retrained on data for related maneuvers such as merging or yielding.
Load-bearing premise
The perception module accurately senses the environment, derives input numerical features, and correctly converts them into linguistic categories that the pretrained model can reliably use under real-world driving conditions.
What would settle it
A controlled real-road test in which the system fails to output a lane-change prediction at least three seconds before the maneuver begins, leaving the ego vehicle without adequate time to complete its braking response.
Figures




read the original abstract
Research on lane change prediction has gained a lot of momentum in the last couple of years. However, most research is confined to simulation or results obtained from datasets, leaving a gap between algorithmic advances and on-road deployment. This work closes that gap by demonstrating, on real hardware, a lane-change prediction system based on Knowledge Graph Embeddings (KGEs) and Bayesian inference. Moreover, the ego-vehicle employs a longitudinal braking action to ensure the safety of both itself and the surrounding vehicles. Our architecture consists of two modules: (i) a perception module that senses the environment, derives input numerical features, and converts them into linguistic categories; and communicates them to the prediction module; (ii) a pretrained prediction module that executes a KGE and Bayesian inference model to anticipate the target vehicle's maneuver and transforms the prediction into longitudinal braking action. Real-world hardware experimental validation demonstrates that our prediction system anticipates the target vehicle's lane change three to four seconds in advance, providing the ego vehicle sufficient time to react and allowing the target vehicle to make the lane change safely.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a lane-change prediction architecture for autonomous vehicles consisting of a perception module that senses the environment, derives numerical features, and converts them to linguistic categories, paired with a pretrained prediction module that applies Knowledge Graph Embeddings (KGE) and Bayesian inference to forecast the target vehicle's maneuver and trigger longitudinal braking on the ego vehicle. The central claim is that real-world hardware experiments demonstrate the system anticipates lane changes 3-4 seconds in advance, providing sufficient reaction time for safe maneuvers by both vehicles.
Significance. If the real-world validation and lead-time claims hold with supporting data, the work would be significant for closing the simulation-to-deployment gap in lane-change prediction research. The hybrid KGE-plus-Bayesian approach is a strength worth crediting, as it attempts to combine symbolic representations with probabilistic reasoning in a hardware setting, which could support more interpretable safety systems in autonomous driving.
major comments (2)
- [Abstract] Abstract: The claim that real-world hardware experimental validation demonstrates 3-4 second anticipation lacks any quantitative metrics (prediction accuracy, number of observed events, error rates, or failure cases), making the data-to-claim link unverifiable and load-bearing for the central deployment result.
- [Perception Module] Perception module description: The assumption that the perception module reliably converts noisy real-world sensor data into correct linguistic categories for the KGE and Bayesian model is critical to the 3-4 s lead-time claim but is unsupported by reported accuracy, confusion matrices, or robustness results under variable conditions.
minor comments (2)
- [Abstract] Abstract: Specify the pretraining dataset, embedding dimensions, and Bayesian prior choices for the KGE model to allow reproducibility assessment.
- Ensure any experimental tables or figures in the full text report statistical details such as sample sizes and variability measures.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and valuable feedback on our manuscript. We address each of the major comments in detail below, indicating the changes we intend to make in the revised version.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that real-world hardware experimental validation demonstrates 3-4 second anticipation lacks any quantitative metrics (prediction accuracy, number of observed events, error rates, or failure cases), making the data-to-claim link unverifiable and load-bearing for the central deployment result.
Authors: We concur with the referee that the abstract's claim regarding the 3-4 second anticipation would be strengthened by the inclusion of quantitative metrics. Accordingly, we will revise the abstract to incorporate relevant statistics from the real-world hardware experiments, including prediction accuracy, the number of observed events, error rates, and failure cases where applicable. revision: yes
-
Referee: [Perception Module] Perception module description: The assumption that the perception module reliably converts noisy real-world sensor data into correct linguistic categories for the KGE and Bayesian model is critical to the 3-4 s lead-time claim but is unsupported by reported accuracy, confusion matrices, or robustness results under variable conditions.
Authors: We recognize that the performance of the perception module in accurately mapping noisy sensor data to linguistic categories is foundational to the reported lead times. The manuscript will be updated to provide additional details on the perception module's accuracy, including any available metrics, confusion matrices, or robustness evaluations under variable real-world conditions. This will address the concern and support the assumptions made in the prediction module. revision: yes
Circularity Check
No significant circularity in empirical deployment and validation
full rationale
The paper presents an engineering architecture consisting of a perception module that converts sensor data to linguistic categories and a pretrained prediction module using KGE plus Bayesian inference, followed by real-world hardware experiments reporting 3-4 second anticipation. No derivation chain, equations, or self-citations are exhibited that reduce the reported anticipation time or safety outcome to fitted parameters or inputs by construction. The validation is an external empirical test on hardware under driving conditions, independent of any internal fitting loop described in the text. This is the most common honest finding for deployment papers whose central claim rests on observed performance rather than a closed mathematical derivation.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
perception module that senses the environment, derives input numerical features, and converts them into linguistic categories... TTC... high-risk... medium-risk... low-risk... THW... risk of collision... risky... safe
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Knowledge Graph Embeddings (KGEs) and Bayesian inference... P(h|e) = P(h)P(e|h)/P(e)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Driving intention recognition and lane change prediction on the highway,
T. Han, J. Jing, and ¨U. ¨Ozg¨uner, “Driving intention recognition and lane change prediction on the highway,” in 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019, pp. 957–962
work page 2019
-
[2]
Attention-based lane change and crash risk prediction model in highways,
Z.-N. Li, X.-H. Huang, T. Mu, and J. Wang, “Attention-based lane change and crash risk prediction model in highways,” IEEE transac- tions on intelligent transportation systems, vol. 23, no. 12, pp. 22 909– 22 922, 2022
work page 2022
-
[3]
Experimental validation of lane-change intention prediction methodologies based on cnn and lstm,
R. Izquierdo, A. Quintanar, I. Parra, D. Fern ´andez-Llorca, and M. A. Sotelo, “Experimental validation of lane-change intention prediction methodologies based on cnn and lstm,” in 2019 IEEE Intelligent Transportation Systems Conference (ITSC) . IEEE, 2019, pp. 3657– 3662
work page 2019
-
[4]
O. Laimona, M. A. Manzour, O. M. Shehata, and E. I. Morgan, “Implementation and evaluation of an enhanced intention prediction algorithm for lane-changing scenarios on highway roads,” in 2020 2nd Novel Intelligent and Leading Emerging Sciences Conference (NILES). IEEE, 2020, pp. 128–133
work page 2020
-
[5]
Lane-change intention inference based on rnn for autonomous driving on highways,
L. Li, W. Zhao, C. Xu, C. Wang, Q. Chen, and S. Dai, “Lane-change intention inference based on rnn for autonomous driving on highways,” IEEE Transactions on Vehicular Technology, vol. 70, no. 6, pp. 5499– 5510, 2021
work page 2021
-
[6]
Vehicle lane change prediction based on knowledge graph embeddings and bayesian inference,
M. Manzour, A. Ballardini, R. Izquierdo, and M. Sotelo, “Vehicle lane change prediction based on knowledge graph embeddings and bayesian inference,” in 2024 IEEE Intelligent Vehicles Symposium (IV) . IEEE, 2024, pp. 1893–1900
work page 2024
-
[7]
M. Manzour, A. Ballardini, R. Izquierdo, and M. ´A. Sotelo, “Explainable lane change prediction for near-crash scenarios using knowledge graph embeddings and retrieval augmented generation,”
-
[8]
Available: https://arxiv.org/abs/2501.11560
[Online]. Available: https://arxiv.org/abs/2501.11560
-
[9]
R. Krajewski, J. Bock, L. Kloeker, and L. Eckstein, “The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 2118–2125
work page 2018
-
[10]
AmpliGraph: a Library for Representation Learning on Knowledge Graphs,
L. Costabello, S. Pai, C. L. Van, R. McGrath, N. McCarthy, and P. Tabacof, “AmpliGraph: a Library for Representation Learning on Knowledge Graphs,” Mar. 2019. [Online]. Available: https://doi.org/10.5281/zenodo.2595043
-
[11]
Jetson nano 2gb developer kit,
N. Corporation, “Jetson nano 2gb developer kit,” https://developer.nv idia.com/embedded/learn/get-started-jetson-nano-2gb-devkit, 2020, accessed: 2025-06-11
work page 2020
-
[12]
S. Inc., “ZED 2i Stereo Camera,” https://www.stereolabs.com/store/p roducts/zed-2i, 2025, accessed: 2025-06-11
work page 2025
-
[13]
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024. [Online]. Available: https://github.com/ultralytics/ultralytics
work page 2024
-
[14]
Bytetrack: Multi-object tracking by associating every detection box,
Y . Zhang, P. Sun, Y . Jiang, D. Yu, F. Weng, Z. Yuan, P. Luo, W. Liu, and X. Wang, “Bytetrack: Multi-object tracking by associating every detection box,” in European conference on computer vision. Springer, 2022, pp. 1–21
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.