Linking Exteroception and Proprioception through Improved Contact Modeling for Soft Growing Robots
Pith reviewed 2026-05-19 04:22 UTC · model grok-4.3
The pith
Soft growing robots can explore and map unstructured environments by using modeled contact deformations to select better growth paths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
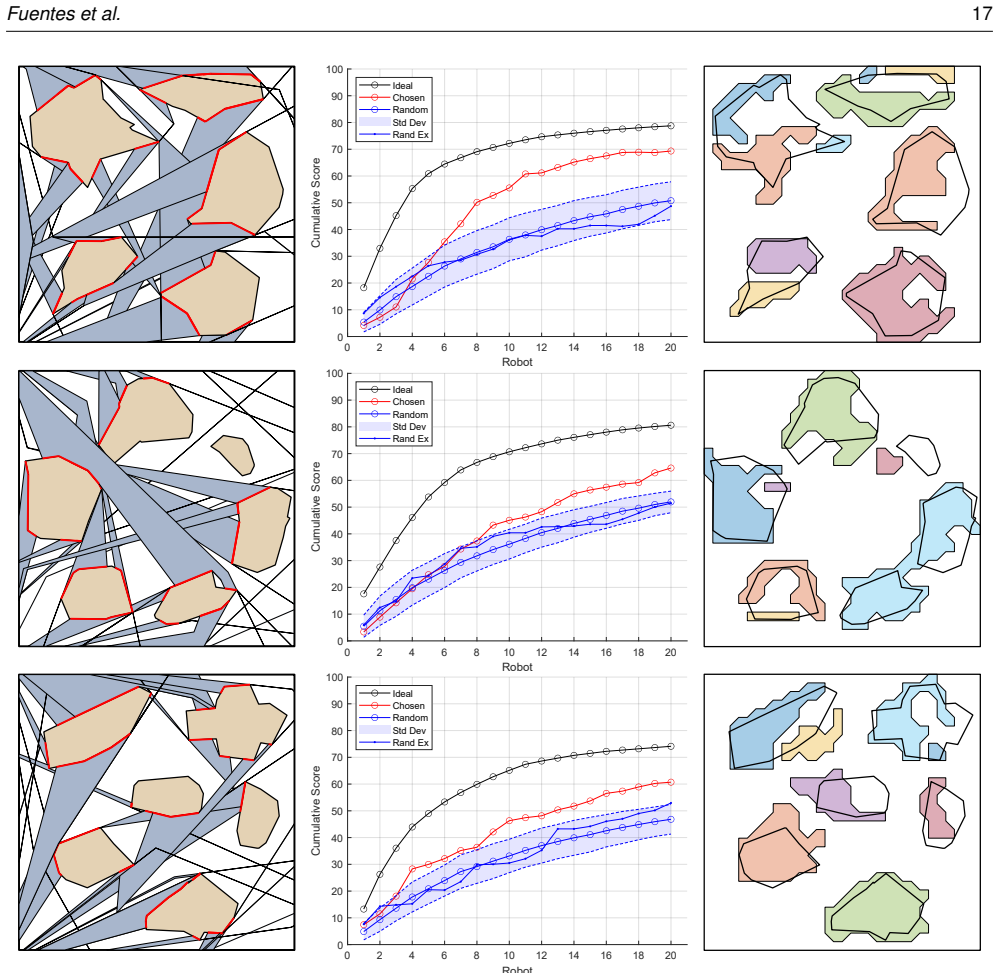
By characterizing collision behavior during discrete turns and building a geometry-based simulator, the work demonstrates that soft growing robots can map unknown 2D environments by using Monte Carlo sampling to estimate the optimal next deployment from current knowledge, with the selection method approaching ideal actions over uniform and non-uniform environments.
What carries the argument
A geometry-based simulator that predicts robot trajectories in 2D environments from characterized collision deformations during turns.
If this is right
- Soft growing robots become viable tools for exploration and mapping in unstructured settings using passive deformation sensing.
- The simulator enables prediction of robot behavior without full dynamic simulation.
- Optimal deployment selection improves efficiency in learning environment structure from tactile data.
- Contact modeling links external sensing with the robot's own shape changes for better navigation.
Where Pith is reading between the lines
- This modeling could extend to three-dimensional environments or continuous growth paths with further validation experiments.
- Similar techniques might improve mapping in other compliant robot designs that rely on passive deformation.
- Real-world factors like friction variations or growth speed changes could be tested as extensions to the current discrete-turn characterization.
Load-bearing premise
The collision behaviors measured in discrete turns will continue to predict robot motion accurately during continuous navigation through unknown and changing spaces.
What would settle it
Running the robot in a new non-uniform environment and finding that actual paths differ substantially from simulator predictions, causing the Monte Carlo method to select poor actions instead of approaching optimal ones.
Figures

















read the original abstract
Passive deformation due to compliance is a commonly used benefit of soft robots, providing opportunities to achieve robust actuation with few active degrees of freedom. Soft growing robots in particular have shown promise in navigation of unstructured environments due to their passive deformation. If their collisions and subsequent deformations can be better understood, soft robots could be used to understand the structure of the environment from direct tactile measurements. In this work, we propose the use of soft growing robots as mapping and exploration tools. We do this by first characterizing collision behavior during discrete turns, then leveraging this model to develop a geometry-based simulator that models robot trajectories in 2D environments. Finally, we demonstrate the model and simulator validity by mapping unknown environments using Monte Carlo sampling to estimate the optimal next deployment given current knowledge. Over both uniform and non-uniform environments, this selection method rapidly approaches ideal actions, showing the potential for soft growing robots in unstructured environment exploration and mapping.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that soft growing robots can serve as mapping and exploration tools in unstructured environments by characterizing passive collision deformations during discrete turns, constructing a geometry-based 2D simulator from those observations, and then applying Monte Carlo sampling over candidate deployments to select actions that map unknown environments; it reports that this selection rapidly approaches ideal actions in both uniform and non-uniform settings.
Significance. If the simulator predictions hold under continuous growth, the work would provide a concrete route to using passive compliance for tactile exteroception in soft robots, reducing reliance on active sensing for navigation in unknown spaces.
major comments (1)
- [Abstract (demonstration of model and simulator validity)] The central claim that the geometry-based simulator supports Monte Carlo estimation of optimal deployments in unknown continuous environments rests on the untested assumption that discrete-turn collision data generalizes to sustained growth trajectories with repeated contacts. No quantitative validation, error metrics, or continuous-trajectory experiments are described that would confirm this generalization (see the demonstration paragraph in the abstract).
minor comments (1)
- [Abstract] The abstract refers to 'improved contact modeling' without stating the specific modeling steps or baseline comparisons used.
Simulated Author's Rebuttal
We thank the referee for the thoughtful review and for identifying a key point about the scope of our simulator validation. We address the major comment below and will revise the manuscript to better clarify the relationship between discrete characterization and continuous trajectories.
read point-by-point responses
-
Referee: [Abstract (demonstration of model and simulator validity)] The central claim that the geometry-based simulator supports Monte Carlo estimation of optimal deployments in unknown continuous environments rests on the untested assumption that discrete-turn collision data generalizes to sustained growth trajectories with repeated contacts. No quantitative validation, error metrics, or continuous-trajectory experiments are described that would confirm this generalization (see the demonstration paragraph in the abstract).
Authors: We agree that the model characterization relies on discrete-turn collision data and that the Monte Carlo demonstrations occur within the geometry-based simulator rather than through direct physical validation of long continuous trajectories. The simulator constructs continuous paths by sequentially applying the observed deformation rules at each contact point, which we posit is sufficient for 2D mapping because local collision geometry dominates the behavior. The abstract demonstration therefore shows that actions selected via Monte Carlo sampling in the simulator approach ideal performance in both uniform and non-uniform simulated environments. We acknowledge the absence of quantitative error metrics (e.g., trajectory deviation or contact-force residuals) between simulator predictions and real-robot continuous growth with repeated contacts. In the revised manuscript we will add a dedicated subsection in the results that reports such metrics from supplementary continuous-growth trials and will update the abstract demonstration paragraph to explicitly state the scope of the current validation. revision: yes
Circularity Check
No load-bearing circularity; modeling chain rests on empirical characterization
full rationale
The derivation proceeds by characterizing collision behavior in discrete turns, building a geometry-based simulator from that data, and then applying Monte Carlo sampling for deployment selection. No equations, fitted parameters, or self-citations are shown to reduce any reported performance metric to its own inputs by construction. The generalization from discrete to continuous trajectories is an explicit modeling assumption rather than a definitional loop, and the central claims remain independently testable against real robot behavior in the described environments.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
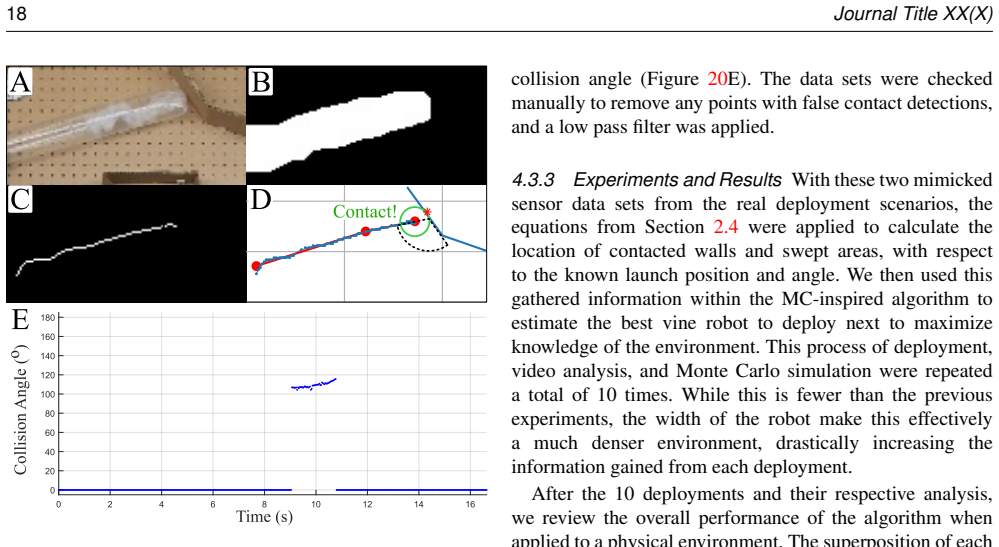
Equations (3), (12)–(15) for critical contact angles θ*_c derived from moment balance Mint = πPR³ and friction; visibility-graph decomposition of multi-contact trajectories (Algorithm 1–3); Monte Carlo sampling of occupancy grids to select next deployment.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2306.01166
Agharese N and Okamura AM (2023) Configuration and fabrication of preformed vine robots. arXiv preprint arXiv:2306.01166
-
[2]
Akinola I, Xu J, Carius J, Fox D and Narang Y (2025) Tacsl: A library for visuotactile sensor simulation and learning. IEEE Transactions on Robotics
work page 2025
-
[3]
Athar S, Zhang X, Ueda J, Zhao Y and She Y (2025) Vibtac: A high-resolution high-bandwidth tactile sensing finger for multi-modal perception in robotic manipulation. IEEE Transactions on Haptics
work page 2025
-
[4]
Baaij T, Holkenborg MK, Stölzle M, van der Tuin D, Naaktgeboren J, Babuška R and Santina CD (2023) Learning 3d shape proprioception for continuum soft robots with multiple magnetic sensors. Soft Matter 19: 44--56. doi:10.1039/D2SM00914E
-
[5]
Frontiers in Robotics and AI 7: 548266
Blumenschein LH, Coad MM, Haggerty DA, Okamura AM and Hawkes EW (2020) Design, modeling, control, and application of everting vine robots. Frontiers in Robotics and AI 7: 548266
work page 2020
-
[6]
IEEE Transactions on Robotics 38: 1820--1840
Blumenschein LH, Koehler M, Usevitch NS, Hawkes EW, Rucker DC and Okamura AM (2022) Geometric solutions for general actuator routing on inflated-beam soft growing robots. IEEE Transactions on Robotics 38: 1820--1840. doi:10.1109/TRO.2021.3115230
-
[7]
In: 2018 IEEE International Conference on Soft Robotics (RoboSoft)
Blumenschein LH, Usevitch NS, Do BH, Hawkes EW and Okamura AM (2018) Helical actuation on a soft inflated robot body. In: 2018 IEEE International Conference on Soft Robotics (RoboSoft). IEEE. ISBN 978-1-5386-4516-1, pp. 245--252. doi:10.1109/ROBOSOFT.2018.8404927
-
[8]
In: 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft)
Chen L, Gao Y, Wang S, Fuentes F, Blumenschein LH and Kingston Z (2025) Physics-grounded differentiable simulation for soft growing robots. In: 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft). IEEE
work page 2025
-
[9]
IEEE Robotics and Automation Magazine 27: 120--132
Coad MM, Blumenschein LH, Cutler S, Zepeda JAR, Naclerio ND, El-Husseiny H, Mehmood U, Ryu JH, Hawkes EW and Okamura AM (2020) Vine robots: Design, teleoperation, and deployment for navigation and exploration. IEEE Robotics and Automation Magazine 27: 120--132. doi:10.1109/MRA.2019.2947538
-
[10]
Comer RL and Levy S (1963) Deflections of an inflated circular-cylindrical cantilever beam. AIAA Journal 1(7): 1652--1655. doi:10.2514/3.1873
-
[11]
National Air and Space Administration (NASA) Technical Note 3466: 1--19
Fichter W (1966) A theory for inflated thin-wall cylindrical beams. National Air and Space Administration (NASA) Technical Note 3466: 1--19
work page 1966
-
[12]
Frias-Miranda E, Srivastava A, Wang S and Blumenschein LH (2023) Vine robot localization via collision. In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 2515--2521. doi:10.1109/IROS55552.2023.10342238
-
[13]
Fuentes F and Blumenschein LH (2023) Mapping unknown environments through passive deformation of soft, growing robots. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 2522--2527. doi:10.1109/IROS55552.2023.10341705
-
[14]
The International Journal of Robotics Research 39(14): 1724--1738
Greer JD, Blumenschein LH, Alterovitz R, Hawkes EW and Okamura AM (2020) Robust navigation of a soft growing robot by exploiting contact with the environment. The International Journal of Robotics Research 39(14): 1724--1738
work page 2020
-
[15]
In: IEEE International Conference on Robotics and Automation
Greer JD, Blumenschein LH, Okamura AM and Hawkes EW (2018) Obstacle-aided navigation of a soft growing robot. In: IEEE International Conference on Robotics and Automation. IEEE. ISBN 9781538630815, pp. 4165--4172. doi:10.1109/ICRA.2018.8460777
-
[16]
In: 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft)
Gruebele AM, Zerbe AC, Coad MM, Okamura AM and Cutkosky MR (2021) Distributed sensor networks deployed using soft growing robots. In: 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft). IEEE, pp. 66--73
work page 2021
-
[17]
Haggerty DA, Naclerio ND and Hawkes EW (2019) Characterizing environmental interactions for soft growing robots. IEEE International Conference on Intelligent Robots and Systems : 3335--3342doi:10.1109/IROS40897.2019.8968137
-
[18]
Hawkes EW, Blumenschein LH, Greer JD and Okamura AM (2017) A soft robot that navigates its environment through growth. Science Robotics 2: eaan3028. doi:10.1126/scirobotics.aan3028
-
[19]
Heiden A, Preninger D, Lehner L, Baumgartner M, Drack M, Woritzka E, Schiller D, Gerstmayr R, Hartmann F and Kaltenbrunner M (2022) 3d printing of resilient biogels for omnidirectional and exteroceptive soft actuators. Science Robotics 7: 2119. doi:10.1126/scirobotics.abk2119
-
[20]
In: International Conference on Robotics and Automation
Hoepflinger MA, Remy CD, Hutter M, Spinello L and Siegwart R (2010) Haptic terrain classification for legged robots. In: International Conference on Robotics and Automation. ISBN 9781424450381, pp. 2828--2833. doi:10.1109/ROBOT.2010.5509309
-
[21]
IEEE Robotics and Automation Letters 6(4): 8694--8701
Jamil B, Yoo G, Choi Y and Rodrigue H (2021) Proprioceptive soft pneumatic gripper for extreme environments using hybrid optical fibers. IEEE Robotics and Automation Letters 6(4): 8694--8701
work page 2021
-
[22]
Jitosho R, Agharese N, Okamura A and Manchester Z (2021) A dynamics simulator for soft growing robots. In: Proceedings - IEEE International Conference on Robotics and Automation, volume 2021-May. Institute of Electrical and Electronics Engineers Inc. ISBN 9781728190778, pp. 11775--11781. doi:10.1109/ICRA48506.2021.9561420
-
[23]
Technical report, National Aeronautics and Space Administration
Leonard RW, Brooks GW and McComb Jr HG (1960) Structural considerations of inflatable reentry vehicles. Technical report, National Aeronautics and Space Administration
work page 1960
-
[24]
Liu M, Zhang Y, Wang J, Qin N, Yang H, Sun K, Hao J, Shu L, Liu J, Chen Q, Zhang P and Tao TH (2022) A star-nose-like tactile-olfactory bionic sensing array for robust object recognition in non-visual environments. Nature Communications 13: 79. doi:10.1038/s41467-021-27672-z
-
[25]
In: 2024 IEEE International Symposium on Safety Security Rescue Robotics (SSRR)
McFarland C, Dhawan A, Kumari R, Council C, Coad M and Hanson N (2024) Field insights for portable vine robots in urban search and rescue. In: 2024 IEEE International Symposium on Safety Security Rescue Robotics (SSRR). IEEE, pp. 190--197
work page 2024
-
[26]
McGarey P, MacTavish K, Pomerleau F and Barfoot TD (2016) The line leading the blind: Towards nonvisual localization and mapping for tethered mobile robots. ISBN 9781467380263, pp. 4799--4806. doi:10.1109/ICRA.2016.7487684
-
[27]
International Journal of Robotics Research 36: 1363--1386
McGarey P, MacTavish K, Pomerleau F and Barfoot TD (2017) Tslam: Tethered simultaneous localization and mapping for mobile robots. International Journal of Robotics Research 36: 1363--1386. doi:10.1177/0278364917732639
-
[28]
Autonomous Robots 42: 1443--1458
Patel R, Cox R and Correll N (2018) Integrated proximity, contact and force sensing using elastomer-embedded commodity proximity sensors. Autonomous Robots 42: 1443--1458. doi:10.1007/s10514-018-9751-4
-
[29]
International Journal of Advanced Robotic Systems 2
Pearson MJ, Gilhespy I, Melhuish C, Mitchinson B, Nibouche M, Pipe AG and Prescott TJ (2005) A biomimetic haptic sensor. International Journal of Advanced Robotic Systems 2. doi:10.5772/5774
-
[30]
Philosophical Transactions of the Royal Society B: Biological Sciences 366: 2989--2995
Prescott TJ, Diamond ME and Wing AM (2011) Active touch sensing. Philosophical Transactions of the Royal Society B: Biological Sciences 366: 2989--2995. doi:10.1098/rstb.2011.0167
-
[31]
Physiological Reviews 92: 1651--1697
Proske U and Gandevia SC (2012) The proprioceptive senses: Their roles in signaling body shape, body position and movement, and muscle force. Physiological Reviews 92: 1651--1697. doi:10.1152/physrev.00048.2011.-This
-
[32]
Available: https://doi.org/10.1007/s43154-021-00065-2
Roberts P, Zadan M and Majidi C (2021) Soft tactile sensing skins for robotics. Current Robotics Reports 2: 343--354. doi:10.1007/s43154-021-00065-2
-
[33]
IEEE/ASME Transactions on Mechatronics 26: 1877--1885
Scharff RBN, Fang G, Tian Y, Wu J, Geraedts JMP and Wang CC (2021) Sensing and reconstruction of 3-d deformation on pneumatic soft robots. IEEE/ASME Transactions on Mechatronics 26: 1877--1885. doi:10.1109/TMECH.2021.3078263
-
[34]
International Journal of Robotics Research 40: 1385--1401
She Y, Wang S, Dong S, Sunil N, Rodriguez A and Adelson E (2021) Cable manipulation with a tactile-reactive gripper. International Journal of Robotics Research 40: 1385--1401. doi:10.1177/02783649211027233
-
[35]
In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Shih B, Drotman D, Christianson C, Huo Z, White R, Christensen HI and Tolley MT (2017) Custom soft robotic gripper sensor skins for haptic object visualization. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. ISBN 978-1-5386-2682-5, pp. 494--501. doi:10.1109/IROS.2017.8202199
-
[36]
In: 2018 IEEE International Conference on Robotics and Automation (ICRA)
Soter G, Conn A, Hauser H and Rossiter J (2018) Bodily aware soft robots: Integration of proprioceptive and exteroceptive sensors. In: 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE. ISBN 978-1-5386-3081-5, pp. 2448--2453. doi:10.1109/ICRA.2018.8463169
-
[37]
Thuruthel TG, Shih B, Laschi C and Tolley MT (2019) Soft robot perception using embedded soft sensors and recurrent neural networks. Science Robotics 4: 1488. doi:10.1126/scirobotics.aav1488
-
[38]
Umedachi T, Kano T, Ishiguro A and Trimmer BA (2016) Gait control in a soft robot by sensing interactions with the environment using self-deformation. Royal Society Open Science 3. doi:10.1098/rsos.160766
-
[39]
In: 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft)
Wang S and Blumenschein LH (2024) Refined modeling for serial pneumatic artificial muscles enables model-based actuation design. In: 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft). IEEE, pp. 800--807
work page 2024
-
[40]
In: American Control Conference
Wang T, Whitman J, Travers M and Choset H (2020) Directional compliance in obstacle-aided navigation for snake robots. In: American Control Conference. ISBN 9781538682661, pp. 2458--2463. doi:10.0/Linux-x86_64
work page 2020
-
[41]
IEEE Robotics and Automation Letters 5: 2666--2673
Watson C and Morimoto TK (2020) Permanent magnet-based localization for growing robots in medical applications. IEEE Robotics and Automation Letters 5: 2666--2673. doi:10.1109/LRA.2020.2972890
-
[42]
Sensors and Actuators A: Physical 253: 188--197
White EL, Case JC and Kramer RK (2017) Multi-mode strain and curvature sensors for soft robotic applications. Sensors and Actuators A: Physical 253: 188--197. doi:10.1016/j.sna.2016.11.031
-
[43]
IEEE Robotics and Automation Letters
Wu H, Sun F, Huang C, Huang H and Chu Z (2025) Soft growing robot explore unknown environments through obstacle interaction. IEEE Robotics and Automation Letters
work page 2025
-
[44]
Yuan W, Dong S and Adelson E (2017) Gelsight: High-resolution robot tactile sensors for estimating geometry and force. Sensors 17: 2762. doi:10.3390/s17122762
-
[45]
In: 2015 IEEE International Conference on Robotics and Automation (ICRA)
Yuan W, Li R, Srinivasan MA and Adelson EH (2015) Measurement of shear and slip with a gelsight tactile sensor. In: 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE. ISBN 978-1-4799-6923-4, pp. 304--311. doi:10.1109/ICRA.2015.7139016
-
[46]
Zhang D, Fan W, Lin J, Li H, Cong Q, Liu W, Lepora NF and Luo S (2025) Design and benchmarking of a multi-modality sensor for robotic manipulation with gan-based cross-modality interpretation. IEEE Transactions on Robotics
work page 2025
-
[47]
IEEE Sensors Journal 22(22): 21410--21427
Zhang S, Chen Z, Gao Y, Wan W, Shan J, Xue H, Sun F, Yang Y and Fang B (2022) Hardware technology of vision-based tactile sensor: A review. IEEE Sensors Journal 22(22): 21410--21427
work page 2022
-
[48]
, " * write output.state after.block = add.period write newline
ENTRY address author booktitle chapter doi edition editor eid howpublished institution isbn journal key month note number organization pages publisher school series title type url volume year label extra.label sort.label short.list INTEGERS output.state before.all mid.sentence after.sentence after.block FUNCTION init.state.consts #0 'before.all := #1 'mid...
-
[49]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize ":" * " " *...
-
[50]
, " * write output.state after.block = add.period write newline
ENTRY address archive author booktitle chapter doi edition editor eid eprint howpublished institution isbn journal key month note number organization pages publisher school series title type url volume year label INTEGERS output.state before.all mid.sentence after.sentence after.block FUNCTION init.state.consts #0 'before.all := #1 'mid.sentence := #2 'af...
-
[51]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize " " * FUNCT...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.