Automatic Road Subsurface Distress Recognition from Ground Penetrating Radar Images using Deep Learning-based Cross-verification
Pith reviewed 2026-05-19 04:10 UTC · model grok-4.3
The pith
A cross-verification strategy with three YOLO models on different GPR views detects road subsurface distress with over 98.6 percent recall.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
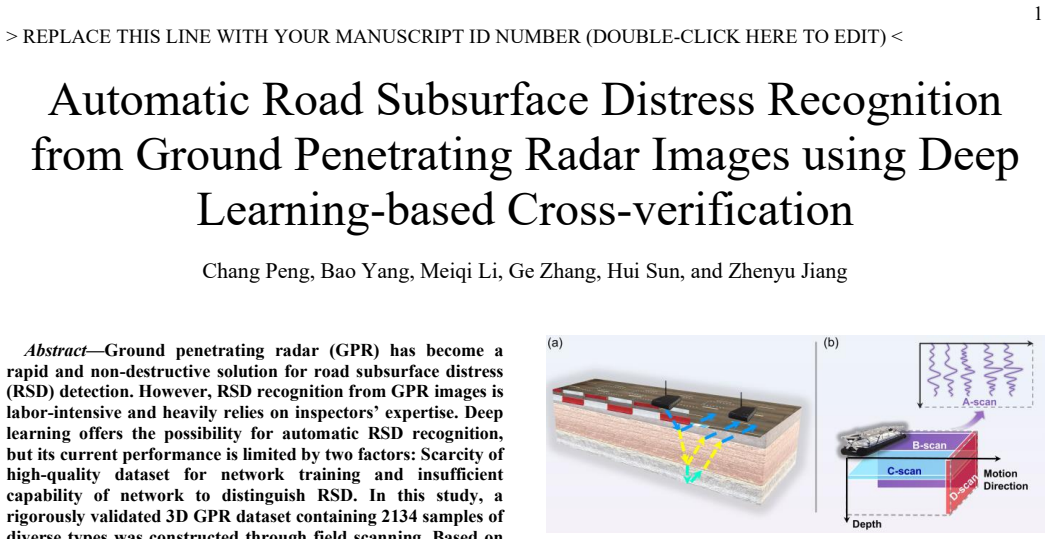
The authors establish that training three separate YOLO-based models on distinct views of a 3D ground penetrating radar dataset and applying a cross-verification strategy that requires agreement among the models allows for reliable automatic detection of road subsurface distress and manholes. With this setup on 2134 validated samples, the system attains a recall over 98.6 percent on real field data while substantially lowering the need for human expertise in the recognition process.
What carries the argument
The cross-verification strategy that combines outputs from three YOLO models trained on different views of the GPR volume to filter detections by requiring consensus.
If this is right
- High recall in detection supports more reliable identification of road defects in practical settings.
- Reduction in manual labor by 90 percent enables faster and more frequent road inspections.
- The strategy leverages complementary information from multiple views to improve overall recognition accuracy.
- Automatic detection applies directly to field-scanned 3D GPR data for road maintenance decisions.
Where Pith is reading between the lines
- Integrating this system with vehicle-mounted GPR could enable continuous monitoring of road networks.
- Similar cross-verification might enhance other deep learning applications in non-destructive testing.
- Future work could test the method on larger datasets or different types of subsurface features.
- Combining the detections with other data sources like traffic load could predict maintenance needs better.
Load-bearing premise
The detections from the three models trained on different views are independent enough that their agreement accurately separates true distress from false positives without overlooking real defects.
What would settle it
Running the cross-verification system on a fresh collection of field GPR scans and comparing the results against complete manual expert labeling of all distress locations to check if the recall remains above 98 percent or if agreement causes misses.
Figures




read the original abstract
Ground penetrating radar (GPR) has become a rapid and non-destructive solution for road subsurface distress (RSD) detection. However, recognizing RSD from GPR images is labor-intensive and heavily relies on the expertise of inspectors. Deep learning-based automatic RSD recognition, though ameliorating the burden of data processing, suffers from insufficient capability to recognize defects. In this study, a novel cross-verification strategy was proposed to fully exploit the complementary abilities of region proposal networks in object recognition from different views of GPR images. Following this strategy, three YOLO-based models were used to detect the RSD (voids and loose structures) and manholes. Each model was trained with a specific view of 3D GPR dataset, which contains rigorously validated 2134 samples of diverse types obtained through field scanning. The cross-verification strategy achieves outstanding accuracy with a recall of over 98.6% in the tests using real field-scanning data. Field tests also show that deep learning-based automatic RSD recognition can reduce the human labor of inspection by around 90%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a deep learning approach for automatic recognition of road subsurface distress (RSD) from Ground Penetrating Radar (GPR) images. It introduces a cross-verification strategy employing three YOLO-based models, each trained on a different view of a 3D GPR dataset comprising 2134 rigorously validated samples. The method detects voids, loose structures, and manholes, achieving a recall of over 98.6% on real field-scanning data and claiming a reduction of approximately 90% in human inspection labor.
Significance. If the reported performance holds and the cross-verification effectively filters false positives while maintaining high recall, this work could have substantial practical impact in civil engineering by automating labor-intensive GPR analysis for road maintenance. The use of a large, field-validated dataset and real-world testing are notable strengths that support reproducibility and applicability claims.
major comments (3)
- Abstract: The headline claim of >98.6% recall via cross-verification is load-bearing for the contribution, yet the manuscript supplies no per-model recall figures, no ablation comparing single-view vs. cross-verified performance, and no analysis of false-positive filtering efficacy. This omission prevents assessment of whether the verification step, rather than the base YOLO detectors, drives the result.
- Cross-verification strategy description: The central assumption that the three view-specific YOLO models supply sufficiently independent and complementary detections is untested. Because all models are trained on different projections of the identical 2134-sample GPR volume, correlated failure modes on low-contrast voids or loose structures are plausible; the paper reports neither error-overlap statistics nor any independence metric (e.g., Cohen’s kappa), leaving the 90% labor-reduction claim resting on an unverified premise.
- Experiments and evaluation: No details are given on training/validation/test splits, hyperparameter choices, false-positive rates, or statistical significance testing for the reported recall. Without these, the soundness of the performance numbers on field data cannot be fully evaluated and the generalizability of the 98.6% figure remains uncertain.
minor comments (2)
- Abstract: The phrase 'rigorously validated 2134 samples' would benefit from a brief description of the validation protocol to strengthen reader confidence in the dataset quality.
- Notation and figures: Ensure that any diagrams illustrating the three-view cross-verification pipeline explicitly label the agreement rule (e.g., majority vote, intersection threshold) so the method is reproducible from the text alone.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We have carefully reviewed each major comment and provide point-by-point responses below. Revisions have been made to address the identified gaps in reporting and analysis.
read point-by-point responses
-
Referee: Abstract: The headline claim of >98.6% recall via cross-verification is load-bearing for the contribution, yet the manuscript supplies no per-model recall figures, no ablation comparing single-view vs. cross-verified performance, and no analysis of false-positive filtering efficacy. This omission prevents assessment of whether the verification step, rather than the base YOLO detectors, drives the result.
Authors: We agree that these details are important for evaluating the contribution of cross-verification. In the revised manuscript we have added per-model recall values for each of the three YOLO detectors, a new ablation table comparing single-view versus cross-verified performance, and quantitative results on false-positive reduction achieved by the verification step. These additions clarify that the cross-verification step, rather than any single model, is responsible for the reported recall. revision: yes
-
Referee: Cross-verification strategy description: The central assumption that the three view-specific YOLO models supply sufficiently independent and complementary detections is untested. Because all models are trained on different projections of the identical 2134-sample GPR volume, correlated failure modes on low-contrast voids or loose structures are plausible; the paper reports neither error-overlap statistics nor any independence metric (e.g., Cohen’s kappa), leaving the 90% labor-reduction claim resting on an unverified premise.
Authors: The three models are deliberately trained on orthogonal or distinct projections of the same 3D volume precisely to exploit complementary information (different slices emphasize different structural features). While perfect statistical independence is not claimed, we have now included pairwise error-overlap counts and a simple agreement metric between model outputs in the revised text. These statistics show limited overlap on the critical low-contrast cases, supporting the premise that cross-verification improves reliability and thereby justifies the reported labor reduction. revision: yes
-
Referee: Experiments and evaluation: No details are given on training/validation/test splits, hyperparameter choices, false-positive rates, or statistical significance testing for the reported recall. Without these, the soundness of the performance numbers on field data cannot be fully evaluated and the generalizability of the 98.6% figure remains uncertain.
Authors: We have expanded the experimental section to report the exact train/validation/test split ratios used for the 2134-sample dataset, the full set of training hyperparameters for each YOLO model, the observed false-positive rates on both validation and field data, and bootstrap-derived confidence intervals together with a statistical significance test for the final recall figure. These additions improve reproducibility and allow readers to assess generalizability. revision: yes
Circularity Check
No circularity: empirical performance measured on held-out field data
full rationale
The paper describes training three YOLO models on different views of a 2134-sample GPR dataset and applying a cross-verification strategy, with recall reported directly from tests on real field-scanning data. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text. The central claim rests on experimental validation rather than any derivation that reduces to its own inputs by construction. The independence assumption for the three views is an empirical hypothesis tested (or not) by the reported metrics, not a definitional loop.
Axiom & Free-Parameter Ledger
free parameters (1)
- YOLO training hyperparameters
axioms (1)
- domain assumption The 2134 samples are representative of real-world GPR variability and were labeled without systematic bias.
Reference graph
Works this paper leans on
-
[1]
G. Yue, Y . Du, C. Liu, S. Guo, Y . Li, and Q. Gao, “Road subsurface distress recognition method using multiattribute feature fusion with ground penetrating radar,” International Journal of Pavement Engineering, vol. 24, no. 2, p. 2037591, Jan. 2023, doi: 10.1080/10298436.2022.2037591
-
[2]
Z. Zhu, G. Zang, G. Jin, W. Cai, and Z. Zhang, “Quantitative Evaluation Method for Asphalt Pavement Structure Integrity Based on Ground Penetrating Radar,” in CICTP 2020 , Xi’an, China (Conference Cancelled): American Society of Civil Engineers, Dec. 2020, pp. 1212–1221. doi: 10.1061/9780784483053.102
-
[3]
Advances of deep learning applications in ground -penetrating radar: A survey,
Z. Tong, J. Gao, and D. Yuan, “Advances of deep learning applications in ground -penetrating radar: A survey,” Construction and Building Materials , vol. 258, p. 120371, Oct. 2020, doi: 10.1016/j.conbuildmat.2020.120371
-
[4]
C. Liu, Y . Du, G. Y ue, Y . Li, D. Wu, and F. Li, “Advances in automatic identification of road subsurface distress using ground penetrating radar: State of the art and future trends,” Automation in Construction, vol. 158, p. 105185, Feb. 2024, doi: 10.1016/j.autcon.2023.105185
-
[5]
The development of a multi - channel GPR system for roadbed damage detection,
X. Xu, S. Peng, Y . Xia, and W. Ji, “The development of a multi - channel GPR system for roadbed damage detection,” Microelectronics Journal, vol. 45, no. 11, pp. 1542–1555, Nov. 2014, doi: 10.1016/j.mejo.2014.09.004
-
[6]
A Highly Digital Multiantenna Ground -Penetrating Radar (GPR) System,
A. Srivastav, P. Nguyen, M. McConnell, K. A. Loparo, and S. Mandal, “A Highly Digital Multiantenna Ground -Penetrating Radar (GPR) System,” IEEE Trans. Instrum. Meas. , vol. 69, no. 10, pp. 7422–7436, Oct. 2020, doi: 10.1109/TIM.2020.2984415
-
[7]
GPR monitoring for road transport infrastructure: A systematic review and machine learning insights,
M. Rasol et al., “GPR monitoring for road transport infrastructure: A systematic review and machine learning insights,” Construction and Building Materials , vol. 324, p. 126686, Mar. 2022, doi: 10.1016/j.conbuildmat.2022.126686
-
[8]
Application of image technology on pavement distress detection: A review,
Z. Du, J. Y uan, F. Xiao, and C. Hettiarachchi, “Application of image technology on pavement distress detection: A review,” Measurement, vol. 184, p. 109900, Nov. 2021, doi: 10.1016/j.measurement.2021.109900
-
[9]
X. L. Travassos, S. L. Avila, and N. Ida, “Artificial Neural Networks and Machine Learning techniques applied to Ground Penetrating Radar: A review,” ACI, vol. 17, no. 2, pp. 296 –308, Apr. 2021, doi: 10.1016/j.aci.2018.10.001
-
[10]
X. Xiong et al. , “Automatic detection and location of pavement internal distresses from ground penetrating radar images based on deep learning,” Construction and Building Materials , vol. 411, p. 134483, Jan. 2024, doi: 10.1016/j.conbuildmat.2023.134483
-
[11]
W. Al -Nuaimy, Y . Huang, M. Nakhkash, M. T. C. Fang, V . T. Nguyen, and A. Eriksen, “Automatic detection of buried utilities and solid objects with GPR using neural networks and pattern recognition,” Journal of Applied Geophysics , vol. 43, no. 2 –4, pp. 157–165, Mar. 2000, doi: 10.1016/S0926-9851(99)00055-5
-
[12]
C. Maas and J. Schmalzl, “Using pattern recognition to automatically localize reflection hyperbolas in data from ground penetrating radar,” Computers & Geosciences , vol. 58, pp. 116 –125, Aug. 2013, doi: 10.1016/j.cageo.2013.04.012
-
[13]
GPR data analysis in time - frequency domain,
Wai-Lok Lai and Chi -Sun Poon, “GPR data analysis in time - frequency domain,” in 2012 14th International Conference on Ground Penetrating Radar (GPR) , Shanghai: IEEE, Jun. 2012, pp. 362–366. doi: 10.1109/ICGPR.2012.6254891
-
[14]
S. S. Todkar, C. Le Bastard, V . Baltazart, A. Ihamouten, and X. Dérobert, “Performance assessment of SVM -based classification techniques for the detection of artificial debondings within pavement structures from stepped -frequency A -scan radar data,” NDT & E International, vol. 107, p. 102128, Oct. 2019, doi: 10.1016/j.ndteint.2019.102128
-
[15]
H. Ali et al., “Shape classification of ground penetrating radar using discrete wavelet transform and principle component analysis,” IOP Conf. Ser.: Mater. Sci. Eng. , vol. 705, no. 1, p. 012046, Nov. 2019, doi: 10.1088/1757-899X/705/1/012046
-
[16]
X. Zhang, J. Bolton, and P . Gader, “A New Learning Method for Continuous Hidden Markov Models for Subsurface Landmine Detection in Ground Penetrating Radar,” IEEE J. Sel. Top. Appl. Earth Observations Remote Sensing, vol. 7, no. 3, pp. 813–819, Mar. 2014, doi: 10.1109/JSTARS.2014.2305981
-
[17]
H. Harkat, A. E. Ruano, M. G. Ruano, and S. D. Bennani, “GPR target detection using a neural network classifier designed by a multi- objective genetic algorithm,” Applied Soft Computing , vol. 79, pp. 310–325, Jun. 2019, doi: 10.1016/j.asoc.2019.03.030
-
[18]
An Improved Convolutional Neural Network System for Automatically Detecting Rebar in GPR Data,
Z. Xiang, A. Rashidi, and G. (Gaby) Ou, “An Improved Convolutional Neural Network System for Automatically Detecting Rebar in GPR Data,” in Computing in Civil Engineering 2019 , Atlanta, Georgia: American Society of Civil Engineers, Jun. 2019, pp. 422–429. doi: 10.1061/9780784482438.054
-
[19]
Residual CNN + Bi-LSTM model to analyze GPR B scan images,
U. Özkaya, Ş. Öztürk, F. Melgani, and L. Seyfi, “Residual CNN + Bi-LSTM model to analyze GPR B scan images,” Automation in Construction, vol. 123, p. 103525, Mar. 2021, doi: 10.1016/j.autcon.2020.103525
-
[20]
Convolutional networks and transformers for intelligent road tunnel investigations,
M. M. Rosso, G. Marasco, S. Aiello, A. Aloisio, B. Chiaia, and G. C. Marano, “Convolutional networks and transformers for intelligent road tunnel investigations,” Computers & Structures , vol. 275, p. 106918, Jan. 2023, doi: 10.1016/j.compstruc.2022.106918
-
[21]
Automatic hyperbola detection and fitting in GPR B - scan image,
W. Lei et al., “Automatic hyperbola detection and fitting in GPR B - scan image,” Automation in Construction , vol. 106, p. 102839, Oct. 2019, doi: 10.1016/j.autcon.2019.102839
-
[22]
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and Ommer, B
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real -Time Object Detection,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , Las V egas, NV , USA: IEEE, Jun. 2016, pp. 779 –788. doi: 10.1109/CVPR.2016.91
-
[23]
J. Zhang, X. Yang, W. Li, S. Zhang, and Y . Jia, “Automatic detection of moisture damages in asphalt pavements from GPR data with deep CNN and IRS method,” Automation in Construction , vol. 113, p. 103119, May 2020, doi: 10.1016/j.autcon.2020.103119
-
[24]
Z. Liu, X. Gu, H. Yang, L. Wang, Y . Chen, and D. Wang, “Novel YOLOv3 Model With Structure and Hyperparameter Optimization for Detection of Pavement Concealed Cracks in GPR Images,” IEEE Trans. Intell. Transport. Syst., vol. 23, no. 11, pp. 22258–22268, Nov. 2022, doi: 10.1109/TITS.2022.3174626
-
[25]
Real-Time Pattern-Recognition of GPR Images with YOLO v3 Implemented by Tensorflow,
Y . Li, Z. Zhao, Y . Luo, and Z. Qiu, “Real-Time Pattern-Recognition of GPR Images with YOLO v3 Implemented by Tensorflow,” Sensors, vol. 20, no. 22, p. 6476, Nov. 2020, doi: 10.3390/s20226476
-
[26]
Y . Li, C. Liu, G. Yue, Q. Gao, and Y . Du, “Deep learning -based pavement subsurface distress detection via ground penetrating radar 3 > REPLACE THIS LINE WITH YOUR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < data,” Automation in Construction , vol. 142, p. 104516, Oct. 2022, doi: 10.1016/j.autcon.2022.104516
-
[27]
Z. Qiu, Z. Zhao, S. Chen, J. Zeng, Y . Huang, and B. Xiang, “Application of an Improved YOLOv5 Algorithm in Real -Time Detection of Foreign Objects by Ground Penetrating Radar,” Remote Sensing, vol. 14, no. 8, p. 1895, Apr. 2022, doi: 10.3390/rs14081895
-
[28]
Layered Media Inversion Network Applied in Ground Penetrating Radar,
R. Liu, Y . Li, P . Yin, H. Sun, Z. Bao, and X. Yang, “Layered Media Inversion Network Applied in Ground Penetrating Radar,” in 2021 CIE International Conference on Radar (Radar) , Haikou, Hainan, China: IEEE, Dec. 2021, pp. 2196 –2199. doi: 10.1109/Radar53847.2021.10028533
-
[29]
N. Li, R. Wu, H. Li, H. Wang, Z. Gui, and D. Song, “MV -GPRNet: Multi-View Subsurface Defect Detection Network for Airport Runway Inspection Based on GPR,” Remote Sensing, vol. 14, no. 18, p. 4472, Sep. 2022, doi: 10.3390/rs14184472
-
[30]
F. Li, F. Yang, X. Qiao, Z. Hu, X. Wu, and H. Xing, “3D ground penetrating radar road underground target identification algorithm using time -frequency statistical features of data,” NDT & E International, vol. 137, p. 102860, Jul. 2023, doi: 10.1016/j.ndteint.2023.102860
-
[31]
S. Khudoyarov, N. Kim, and J. -J. Lee, “Three -dimensional convolutional neural network –based underground object classification using three-dimensional ground penetrating radar data,” Structural Health Monitoring , vol. 19, no. 6, pp. 1884 –1893, Nov. 2020, doi: 10.1177/1475921720902700
-
[32]
T. Yamaguchi, T. Mizutani, and T. Nagayama, “Mapping Subsurface Utility Pipes by 3 -D Convolutional Neural Network and Kirchhoff Migration Using GPR Images,” IEEE Trans. Geosci. Remote Sensing, vol. 59, no. 8, pp. 6525 –6536, Aug. 2021, doi: 10.1109/TGRS.2020.3030079
-
[33]
T. Yamaguchi, T. Mizutani, K. Meguro, and T. Hirano, “Detecting Subsurface V oids From GPR Images by 3 -D Convolutional Neural Network Using 2 -D Finite Difference Time Domain Method,” IEEE J. Sel. Top. Appl. Earth Observations Remote Sensing , vol. 15, pp. 3061–3073, 2022, doi: 10.1109/JSTARS.2022.3165660
-
[34]
3D GPR Image-based UcNet for Enhancing Underground Cavity Detectability,
M.-S. Kang, N. Kim, S. B. Im, J. -J. Lee, and Y .-K. An, “3D GPR Image-based UcNet for Enhancing Underground Cavity Detectability,” Remote Sensing, vol. 11, no. 21, p. 2545, Oct. 2019, doi: 10.3390/rs11212545
-
[35]
A novel 3D GPR image arrangement for deep learning -based underground object classification,
N. Kim, S. Kim, Y .-K. An, and J. -J. Lee, “A novel 3D GPR image arrangement for deep learning -based underground object classification,” International Journal of Pavement Engineering , vol. 22, no. 6, pp. 740 –751, May 2021, doi: 10.1080/10298436.2019.1645846
-
[36]
Triplanar Imaging of 3 -D GPR Data for Deep-Learning-Based Underground Object Detection,
N. Kim, S. Kim, Y .-K. An, and J. -J. Lee, “Triplanar Imaging of 3 -D GPR Data for Deep-Learning-Based Underground Object Detection,” IEEE J. Sel. Top. Appl. Earth Observations Remote Sensing , vol. 12, no. 11, pp. 4446 –4456, Nov. 2019, doi: 10.1109/JSTARS.2019.2953505
-
[37]
Z. Liu, X. Gu, J. Chen, D. Wang, Y . Chen, and L. Wang, “Automatic recognition of pavement cracks from combined GPR B -scan and C - scan images using multiscale feature fusion deep neural networks,” Automation in Construction , vol. 146, p. 104698, Feb. 2023, doi: 10.1016/j.autcon.2022.104698
-
[38]
Pavement Distress Detection Using Three -Dimension Ground Penetrating Radar and Deep Learning,
J. Yang, K. Ruan, J. Gao, S. Yang, and L. Zhang, “Pavement Distress Detection Using Three -Dimension Ground Penetrating Radar and Deep Learning,” Applied Sciences , vol. 12, no. 11, p. 5738, Jun. 2022, doi: 10.3390/app12115738
-
[39]
H. Lv, Y . Zhang, J. Dai, H. Wu, J. Wang, and D. Wang, “Intelligent Recognition of GPR Road Hidden Defect Images Based on Feature Fusion and Attention Mechanism,” IEEE Trans. Geosci. Remote Sensing, vol. 63, pp. 1–17, 2025, doi: 10.1109/tgrs.2025.3575293
-
[40]
YOLOX: Exceeding YOLO Series in 2021
Z. Ge, S. Liu, F. Wang, Z. Li, and J. Sun, “YOLOX: Exceeding YOLO Series in 2021,” 2021, arXiv. doi: 10.48550/ARXIV .2107.08430
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv 2021
-
[41]
Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 37, no. 9, pp. 1904–1916, Sep. 2015, doi: 10.1109/TPAMI.2015.2389824
-
[42]
Score-cam: Score-weighted visual explanations for convolutional neural net- works
C.-Y . Wang, H.-Y . Mark Liao, Y .-H. Wu, P .-Y . Chen, J.-W. Hsieh, and I.-H. Yeh, “CSPNet: A New Backbone that can Enhance Learning Capability of CNN,” in 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW) , Seattle, WA, USA: IEEE, Jun. 2020, pp. 1571 –1580. doi: 10.1109/CVPRW50498.2020.00203
-
[43]
K. He, X. Zhang, S. Ren, and J. Sun, “Deep Residual Learning for Image Recognition,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , Las Vegas, NV , USA: IEEE, Jun. 2016, pp. 770–778. doi: 10.1109/CVPR.2016.90
-
[44]
Object Detection with Discriminatively Trained Part -Based Models,
P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and D. Ramanan, “Object Detection with Discriminatively Trained Part -Based Models,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 32, no. 9, pp. 1627–1645, Sep. 2010, doi: 10.1109/TPAMI.2009.167. 4 > REPLACE THIS LINE WITH YOUR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < Chang Peng received the BS...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.