Adaptive Quantized Planetary Crater Detection System for Autonomous Space Exploration
Pith reviewed 2026-05-18 21:38 UTC · model grok-4.3
The pith
A mathematical blueprint integrates an INT8 quantized neural network and adaptive multi-sensor fusion to enable reliable planetary crater detection on constrained space hardware.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is a mathematical blueprint that combines an INT8 Quantized Neural Network designed for Quantization Aware Training with an Adaptive Multi-Sensor Fusion module deriving the exact integer requantization multiplier for spatial attention gating. This setup, together with FP16 coordinate conversion for anchor-free center-to-edge regression, is claimed to ensure reliable perception during extreme cross-illuminations and optical hardware dropouts while fitting within the strict limits of space-qualified onboard computers.
What carries the argument
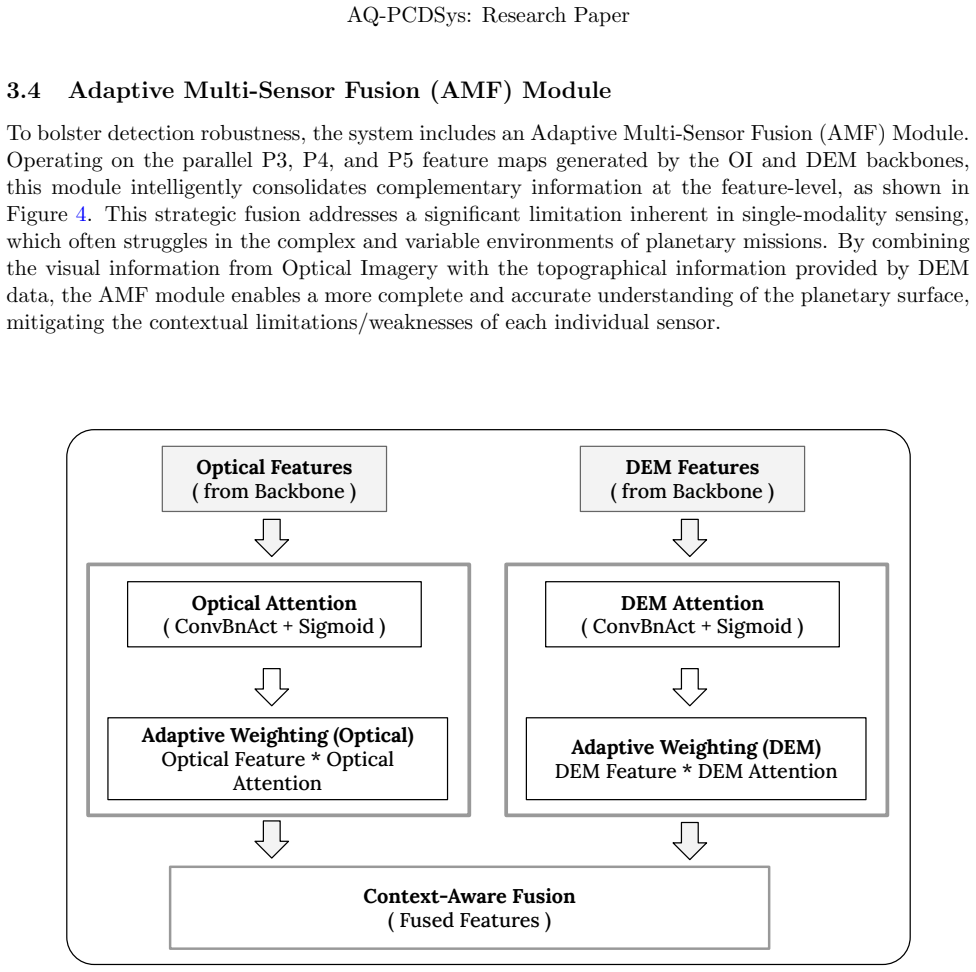
The Adaptive Multi-Sensor Fusion module that derives the exact integer requantization multiplier for spatial attention gating to fuse Optical Imagery and Digital Elevation Models at the feature level.
If this is right
- Fits high-fidelity perception models into the power, thermal, and memory constraints of extraterrestrial exploration platforms.
- Maintains environmental perception reliability despite extreme cross-illuminations and sensor dropouts via active fusion.
- Accurately detects and frames asymmetrical craters using center-to-edge regression protected from integer truncation.
- Provides the structural logic and mathematical bounds for designing future space mission perception software.
- Defines specific criteria for a Hardware-in-the-Loop evaluation to validate the architecture empirically.
Where Pith is reading between the lines
- Simulating the formal math on standard hardware could identify potential precision loss before actual space deployment.
- The integer-based multiplier approach for attention might generalize to other fusion problems in low-power AI applications.
- This theoretical work could inform similar quantization strategies for other autonomous systems in harsh environments like underwater or aerial robotics.
- The center-to-edge method for irregular shapes may prove useful in medical imaging or other domains with non-standard object geometries.
Load-bearing premise
The mathematical formalizations for the requantization multiplier, spatial attention gating, and FP16 coordinate conversion will produce functional real-world performance on space hardware without introducing unmodeled errors or truncation issues.
What would settle it
A concrete falsifier would be implementing the blueprint and running it on space-like hardware or simulators, then checking if detection performance degrades or errors appear when testing under extreme illumination variations and with optical sensor failures.
Figures





read the original abstract
Autonomous planetary exploration demands real-time, high-fidelity environmental perception. Standard deep learning models require massive computational resources. Conversely, space-qualified onboard computers operate under strict power, thermal, and memory limits. This disparity creates a severe engineering bottleneck, preventing the deployment of highly capable perception architectures on extraterrestrial exploration platforms. In this foundational concept paper, we propose the theoretical architecture for the Adaptive Quantized Planetary Crater Detection System (AQ-PCDSys) to resolve this bottleneck. We present a mathematical blueprint integrating an INT8 Quantized Neural Network (QNN) designed specifically for Quantization Aware Training (QAT). To address sensor fragility, we mathematically formalize an Adaptive Multi-Sensor Fusion (AMF) module. By deriving the exact integer requantization multiplier required for spatial attention gating, this module actively selects and fuses Optical Imagery (OI) and Digital Elevation Models (DEMs) at the feature level, ensuring reliable perception during extreme cross-illuminations and optical hardware dropouts. Furthermore, the architecture introduces anchor-free, center-to-edge regression heads, protected by a localized FP16 coordinate conversion, to accurately frame asymmetrical lunar craters without catastrophic integer truncation. Rather than presenting physical hardware telemetry, this manuscript establishes the theoretical bounds, structural logic, and mathematical justifications for the architecture. We outline a rigorous Hardware-in-the-Loop (HITL) evaluation protocol to define the exact testing criteria required for future empirical validation, paving the way for next-generation space-mission software design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a foundational concept paper proposing the Adaptive Quantized Planetary Crater Detection System (AQ-PCDSys). It outlines a theoretical architecture that combines an INT8 Quantized Neural Network (QNN) with Quantization Aware Training (QAT), an Adaptive Multi-Sensor Fusion (AMF) module that derives an exact integer requantization multiplier for spatial attention gating between Optical Imagery and Digital Elevation Models, and anchor-free center-to-edge regression heads protected by localized FP16 coordinate conversion. The work claims this resolves computational and sensor-fragility bottlenecks for real-time crater detection under extreme illumination and hardware dropout conditions on space hardware, and it defines a Hardware-in-the-Loop evaluation protocol for future validation. No empirical results, equations, or implementation details are supplied.
Significance. If the unshown derivations for the requantization multiplier, attention gating, and FP16 conversion prove correct and free of truncation or quantization artifacts, the architecture could address a genuine deployment gap between high-capacity perception models and the strict power/memory/thermal constraints of space-qualified processors. The emphasis on parameter-free integer operations and multi-sensor robustness under cross-illumination is relevant to onboard autonomy. However, because the manuscript supplies only high-level blueprints without formalizations, error bounds, or any validation, the current significance is limited to a high-level systems sketch rather than a substantiated contribution.
major comments (3)
- [AMF module and abstract] The central claim that the AMF module 'derives the exact integer requantization multiplier' for spatial attention gating (stated in the abstract and repeated in the AMF description) is unsupported: no equations, derivation steps, or proof of integer exactness are provided anywhere in the manuscript. This renders the 'parameter-free' and 'exact' assertions unverifiable and load-bearing for the reliability guarantees under hardware dropout.
- [Regression heads and coordinate conversion] The FP16 coordinate conversion intended to protect center-to-edge regression from integer truncation is described only at the architectural level; no conversion formula, scaling analysis, or error-bound derivation appears in the text. Without these, it is impossible to confirm that truncation is avoided for asymmetrical lunar craters as claimed.
- [QNN and QAT integration] The manuscript positions itself as establishing 'theoretical bounds, structural logic, and mathematical justifications,' yet supplies neither the QAT integration equations for the INT8 QNN nor any analysis of how quantization interacts with the AMF gating under the stated illumination extremes. This absence directly undermines the soundness assessment of the proposed blueprint.
minor comments (2)
- [Abstract] The acronym AQ-PCDSys is introduced without an explicit expansion on first use in the abstract.
- [Evaluation protocol] The HITL evaluation protocol is outlined at a high level; adding concrete metrics (e.g., required IoU thresholds, power budgets, or dropout rates) would improve clarity for future implementers.
Simulated Author's Rebuttal
We thank the referee for their thorough and constructive review of our manuscript. We appreciate the acknowledgment of the potential relevance of the AQ-PCDSys architecture to addressing deployment gaps in space hardware. We address each of the major comments below, providing clarifications and committing to revisions where appropriate to strengthen the mathematical foundations of the proposed blueprint.
read point-by-point responses
-
Referee: [AMF module and abstract] The central claim that the AMF module 'derives the exact integer requantization multiplier' for spatial attention gating (stated in the abstract and repeated in the AMF description) is unsupported: no equations, derivation steps, or proof of integer exactness are provided anywhere in the manuscript. This renders the 'parameter-free' and 'exact' assertions unverifiable and load-bearing for the reliability guarantees under hardware dropout.
Authors: The manuscript is a foundational concept paper that outlines the high-level architecture and design principles. The AMF module is described as deriving the multiplier from integer operations on sensor data to achieve parameter-free fusion. We acknowledge that explicit equations and derivation steps are not included in the current version. To make these claims verifiable, we will add a new section detailing the mathematical derivation of the requantization multiplier, including steps to ensure integer exactness and analysis under hardware dropout scenarios. revision: yes
-
Referee: [Regression heads and coordinate conversion] The FP16 coordinate conversion intended to protect center-to-edge regression from integer truncation is described only at the architectural level; no conversion formula, scaling analysis, or error-bound derivation appears in the text. Without these, it is impossible to confirm that truncation is avoided for asymmetrical lunar craters as claimed.
Authors: We agree that the description of the FP16 coordinate conversion is currently at the architectural level. The intent is to use higher precision for coordinate regression to avoid truncation effects in asymmetrical craters. In the revised manuscript, we will provide the specific conversion formula, a scaling analysis between the quantized feature space and FP16 coordinates, and error bounds to support the claim for lunar crater geometries. revision: yes
-
Referee: [QNN and QAT integration] The manuscript positions itself as establishing 'theoretical bounds, structural logic, and mathematical justifications,' yet supplies neither the QAT integration equations for the INT8 QNN nor any analysis of how quantization interacts with the AMF gating under the stated illumination extremes. This absence directly undermines the soundness assessment of the proposed blueprint.
Authors: As the paper establishes the overall theoretical framework rather than full implementation details, the QAT is referenced as the standard approach for INT8 networks. We recognize the need for more explicit integration equations and interaction analysis. We will revise the manuscript to include the QAT equations for the QNN and a discussion of how quantization affects the AMF gating under extreme illumination conditions, while maintaining that comprehensive validation follows the proposed HITL protocol. revision: yes
Circularity Check
No significant circularity detected: high-level conceptual claims with no exhibited derivation chain
full rationale
The manuscript is explicitly a foundational concept paper that proposes a theoretical architecture for AQ-PCDSys, including an INT8 QNN and AMF module. It claims to 'mathematically formalize' the AMF module and 'derive the exact integer requantization multiplier required for spatial attention gating' while also introducing FP16 coordinate conversion. However, the text supplies no equations, proofs, formal derivations, or step-by-step logic for these elements, instead outlining 'theoretical bounds, structural logic, and mathematical justifications' and deferring to a future HITL evaluation protocol. With no specific derivation chain, equations, or self-referential reductions presented for inspection, no load-bearing steps can be identified that reduce to inputs by construction, self-definition, or self-citation. The claims remain high-level assertions rather than constructed results that can be checked for circularity.
Axiom & Free-Parameter Ledger
free parameters (2)
- requantization multiplier
- FP16 coordinate conversion scaling
axioms (2)
- domain assumption Quantization Aware Training preserves sufficient accuracy for INT8 inference in perception tasks
- domain assumption Feature-level fusion of OI and DEMs remains robust under sensor dropout and illumination variation
invented entities (2)
-
AQ-PCDSys
no independent evidence
-
AMF module
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The core of QAT is the simulation of quantization, which maps a full-precision floating-point value r to a lower-precision integer q. This is achieved through an affine mapping: r ≈ S(q − Z)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Aoi = σ(Convoi(Foi)); Fweighted oi = Aoi ⊙ Foi; Ffused ← Concatenate(...) (Algorithm 1)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Fassett, C., et al. “Lunar impact basins: Stratigraphy, sequence and ages from superposed crater populations measured from Lunar Orbiter Laser Altimeter (LOLA) data.” J. Geophys. Res. Plan- ets 117.E12 (2012)
work page 2012
-
[2]
Global distribution of large lunar craters: Implications for resurfacing and impactor populations
Head, J. W., et al. “Global distribution of large lunar craters: Implications for resurfacing and impactor populations.” Science 329.5998 (2010): 1504-1507
work page 2010
-
[3]
He, K., et al. “Mask R-CNN.” Proceedings of the IEEE international conference on computer vision (2017): 2961-269
work page 2017
-
[4]
Quantization and training of neural networks for efficient integer-arithmetic- only inference
Jacob, B., et al. “Quantization and training of neural networks for efficient integer-arithmetic- only inference.” Proceedings of the IEEE conference on computer vision and pattern recognition (2018): 2704-2713
work page 2018
-
[5]
Moon crater detection using nested attention mechanism based UNet++
Jia, Y., Liu, L., Zhang, C. “Moon crater detection using nested attention mechanism based UNet++.” IEEE Access 9 (2021): 44107-44116
work page 2021
-
[6]
ultralytics/yolov5: v3.1 - Bug Fixes and Performance Improvements
Jocher, G., et al. “ultralytics/yolov5: v3.1 - Bug Fixes and Performance Improvements.” Zenodo (2020)
work page 2020
-
[7]
You Only Look Once: Unified, Real-Time Object Detection
Redmon, J., et al. “You Only Look Once: Unified, Real-Time Object Detection.” Proceedings of the IEEE conference on computer vision and pattern recognition (2016): 779-788
work page 2016
-
[8]
Quantizing deep convolutional networks for efficient inference: A whitepaper
Krishnamoorthi, R. “Quantizing deep convolutional networks for efficient inference: A survey.” arXiv preprint arXiv:1806.08342 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[9]
Lin, X., et al. “Lunar Crater Detection on Digital Elevation Model: A Complete Workflow Using Deep Learning and Its Application.” Remote Sensing 14.3 (2022): 621
work page 2022
-
[10]
Paul, A., et al. “AQ-PCDSys: Adaptive Quantized Planetary Crater Detection System for Au- tonomous Outer Space Planetary Exploration.” (2025), Patent Pending
work page 2025
-
[11]
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Net- works
Ren, S., et al. “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Net- works.” Advances in neural information processing systems 28 (2015)
work page 2015
-
[12]
Manual feature extraction in lunar studies
Salamuni´ ccar, G., & Lonˇ cari´ c, S. “Manual feature extraction in lunar studies.” Computers & Geosciences 34.10 (2008): 1217-1228
work page 2008
-
[13]
Contour-based automatic crater recognition using digital elevation models from Chang’E missions
Zuo, W., et al. “Contour-based automatic crater recognition using digital elevation models from Chang’E missions.” Computers & Geosciences 97 (2016): 79-88
work page 2016
-
[14]
Vaswani, A., et al. “Attention is all you need.” Advances in neural information processing systems 30 (2017). 17 ©2025 research.aditripaul.org
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.