Geometric Autoencoder Priors for Bayesian Inversion: Learn First Observe Later
Pith reviewed 2026-05-18 14:19 UTC · model grok-4.3
pith:ZUJM75GH Add to your LaTeX paper
What is a Pith Number?\usepackage{pith}
\pithnumber{ZUJM75GH}
Prints a linked pith:ZUJM75GH badge after your title and writes the identifier into PDF metadata. Compiles on arXiv with no extra files. Learn more
The pith
Geometric autoencoders learn geometry-aware priors from diverse physical datasets to enable Bayesian inversion on new systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
GABI distills information from large datasets of systems with varying geometries, without requiring knowledge of governing PDEs, boundary conditions, or observation processes, into a rich latent prior that is seamlessly combined with the likelihood of a specific observation process, yielding a geometry-adapted posterior distribution.
What carries the argument
The geometric autoencoder that encodes physical responses from varying geometries into a shared latent space to serve as a generative, geometry-conditioned prior for Bayesian inversion.
If this is right
- Predictive accuracy becomes comparable to deterministic supervised learning in settings where the latter applies.
- Uncertainty quantification stays well calibrated and robust on problems with complex geometries.
- Information sharing across multiple distinct physical systems reduces ill-posedness without relying on standard multi-system Bayesian UQ techniques.
- An architecture-agnostic design permits efficient GPU-based implementation through Approximate Bayesian Computation sampling.
Where Pith is reading between the lines
- The same learned latent space could transfer information between related physical phenomena such as heat transfer and fluid flow if the training collection spans those domains.
- Inverse problems could proceed in regimes where governing equations are unknown or intractable by relying entirely on the data-driven prior.
- Online updating of the latent representation becomes feasible if new observations are folded back into the autoencoder after initial training.
Load-bearing premise
Large and representative datasets of physical responses across varying geometries exist and suffice for the autoencoder to learn priors that generalize to unseen observation processes and geometries.
What would settle it
Apply GABI to a held-out geometry and a new observation process, then check whether the posterior mean recovers the true field more accurately than a standard non-geometry-aware prior and whether the uncertainty intervals contain ground truth at the nominal rate.
Figures













read the original abstract
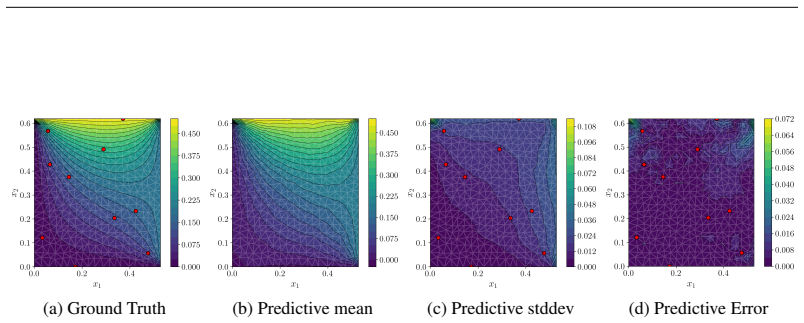
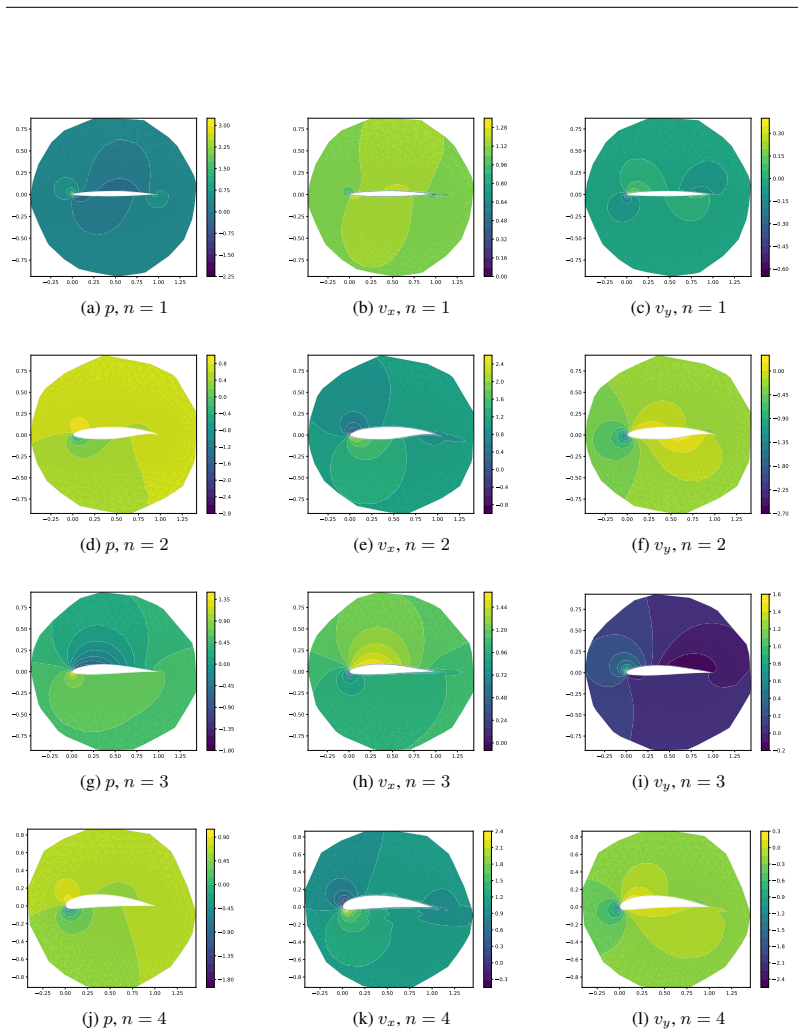
Uncertainty Quantification (UQ) is paramount for inference in engineering. A common inference task is to recover full-field information of physical systems from a small number of noisy observations, a usually highly ill-posed problem. Sharing information from multiple distinct yet related physical systems can alleviate this ill-posedness. Critically, engineering systems often have complicated variable geometries prohibiting the use of standard multi-system Bayesian UQ. In this work, we introduce Geometric Autoencoders for Bayesian Inversion (GABI), a framework for learning geometry-aware generative models of physical responses that serve as highly informative geometry-conditioned priors for Bayesian inversion. Following a ''learn first, observe later'' paradigm, GABI distills information from large datasets of systems with varying geometries, without requiring knowledge of governing PDEs, boundary conditions, or observation processes, into a rich latent prior. At inference time, this prior is seamlessly combined with the likelihood of a specific observation process, yielding a geometry-adapted posterior distribution. Our proposed framework is architecture-agnostic. A creative use of Approximate Bayesian Computation (ABC) sampling yields an efficient implementation that utilizes modern GPU hardware. We test our method on: steady-state heat over rectangular domains; Reynolds-Averaged Navier-Stokes (RANS) flow around airfoils; Helmholtz resonance and source localization on 3D car bodies; RANS airflow over terrain. We find: the predictive accuracy to be comparable to deterministic supervised learning approaches in the restricted setting where supervised learning is applicable; UQ to be well calibrated and robust on challenging problems with complex geometries.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Geometric Autoencoders for Bayesian Inversion (GABI), a 'learn first, observe later' framework for uncertainty quantification in engineering systems with variable geometries. It trains a geometry-conditioned generative model on ensembles of simulations from systems with diverse geometries to create a latent prior, which is then combined with an arbitrary observation likelihood using Approximate Bayesian Computation (ABC) sampling to obtain a geometry-adapted posterior. The approach does not require knowledge of governing PDEs, boundary conditions, or specific observation processes during training. Experiments are presented on steady-state heat conduction over rectangular domains, RANS flow around airfoils, 3D Helmholtz resonance on car bodies, and RANS airflow over terrain, showing predictive accuracy comparable to deterministic supervised learning where applicable, and well-calibrated uncertainty quantification.
Significance. If the central claims hold, this work is significant for Bayesian inversion tasks involving complex, variable geometries where standard multi-system approaches fail. By distilling information from large simulation datasets into geometry-aware priors without PDE knowledge, it provides a practical way to share information across related systems. The architecture-agnostic nature and GPU-efficient ABC implementation are notable strengths. The empirical results on multiple challenging problems support the potential for broader application in engineering UQ, with explicit credit due for the reproducible experimental validation across four distinct physical regimes demonstrating calibrated posteriors.
minor comments (3)
- [§3.2] §3.2: The ABC sampling procedure would benefit from an explicit pseudocode listing of the GPU-parallelized steps, including how geometry conditioning is applied during proposal generation, to improve reproducibility.
- [Figure 4] Figure 4 (airfoil results): The legend and caption do not indicate the exact number of pressure observations used per test case, which is needed to evaluate the degree of ill-posedness addressed by the geometry-adapted prior.
- [Table 2] Table 2: The reported calibration metrics for the 3D Helmholtz case lack error bars or bootstrap estimates, making it difficult to assess whether the reported coverage probabilities are statistically distinguishable from the supervised baseline.
Simulated Author's Rebuttal
We thank the referee for their positive and accurate summary of our work on Geometric Autoencoders for Bayesian Inversion (GABI). The assessment correctly captures the 'learn first, observe later' paradigm, the geometry-conditioned latent priors, the use of ABC sampling, and the empirical validation across multiple physical regimes. We appreciate the recognition of the method's significance for variable-geometry Bayesian inversion tasks and the strengths noted in the architecture-agnostic design and reproducible experiments. The recommendation for minor revision is welcome, and we will incorporate any specific suggestions in the revised manuscript.
Circularity Check
No significant circularity
full rationale
The paper trains a geometry-conditioned generative model on simulation ensembles of full-field responses across varying geometries, without reference to the target observation processes or likelihoods. This prior is then combined at inference time with an arbitrary observation likelihood via ABC sampling. The training phase operates independently of the specific Bayesian inversion task, and the resulting posterior is not equivalent to any fitted quantity by construction. No load-bearing self-citations, self-definitional steps, or ansatzes that reduce the central claim to its inputs are present. The derivation remains self-contained and externally benchmarked against supervised baselines on multiple engineering problems.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Large datasets of physical responses with varying geometries are available and representative for training.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
GABI distills information from large datasets of systems with varying geometries... into a rich latent prior... combined with the likelihood... yielding a geometry-adapted posterior
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
architecture-agnostic... Graph Convolutional Network... MMD... ABC sampling
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
Distributional Inverse Homogenization
Distributional inverse homogenization recovers microstructural statistics from macroscopic mechanical measurements by leveraging collections of bulk data in periodic and stochastic settings.
-
Distributional Inverse Homogenization
Distributional inverse homogenization learns microstructural statistics from bulk mechanical measurements by inverting the homogenization process statistically.
Reference graph
Works this paper leans on
-
[1]
Adam: A Method for Stochastic Optimization
Kingma DP Ba J Adam et al. A method for stochastic optimization.arXiv preprint arXiv:1412.6980, 1412(6),
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
Analyzing Inverse Problems with Invertible Neural Networks
Lynton Ardizzone, Jakob Kruse, Sebastian Wirkert, Daniel Rahner, Eric W Pellegrini, Ralf S Klessen, Lena Maier-Hein, Carsten Rother, and Ullrich Köthe. Analyzing inverse problems with invertible neural networks.arXiv preprint arXiv:1808.04730,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Geometric Deep Learning: Grids, Groups, Graphs, Geodesics, and Gauges
10 Michael M Bronstein, Joan Bruna, Taco Cohen, and Petar Veli ˇckovi´c. Geometric deep learning: Grids, groups, graphs, geodesics, and gauges.arXiv preprint arXiv:2104.13478,
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
Gregory Duthé, Imad Abdallah, and Eleni Chatzi. Graph transformers for inverse physics: recon- structing flows around arbitrary 2d airfoils.arXiv preprint arXiv:2501.17081,
-
[5]
Variational Graph Auto-Encoders
Thomas N Kipf and Max Welling. Variational graph auto-encoders.arXiv preprint arXiv:1611.07308,
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Semi-Supervised Classification with Graph Convolutional Networks
TN Kipf. Semi-supervised classification with graph convolutional networks.arXiv preprint arXiv:1609.02907,
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Nonlocality and nonlinearity implies universality in operator learning.URL https://arxiv
11 Samuel Lanthaler, Zongyi Li, and Andrew M Stuart. Nonlocality and nonlinearity implies universality in operator learning.URL https://arxiv. org/abs/2304.13221,
-
[8]
Deepergcn: All you need to train deeper gcns.arXiv preprint arXiv:2006.07739,
Guohao Li, Chenxin Xiong, Ali Thabet, and Bernard Ghanem. Deepergcn: All you need to train deeper gcns.arXiv preprint arXiv:2006.07739,
-
[9]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
Peter Mostowsky, Vincent Dutordoir, Iskander Azangulov, Noémie Jaquier, Michael John Hutchinson, Aditya Ravuri, Leonel Rozo, Alexander Terenin, and Viacheslav Borovitskiy. The geometrickernels package: Heat and matérn kernels for geometric learning on manifolds, meshes, and graphs. arXiv:2407.08086,
-
[11]
Charilaos Mylonas, Imad Abdallah, and Eleni Chatzi. Relational vae: A continuous latent variable model for graph structured data.arXiv preprint arXiv:2106.16049,
-
[12]
Geometric autoencoders–what you see is what you decode.arXiv preprint arXiv:2306.17638,
Philipp Nazari, Sebastian Damrich, and Fred A Hamprecht. Geometric autoencoders–what you see is what you decode.arXiv preprint arXiv:2306.17638,
-
[13]
Differentiable Physics-informed Graph Networks
Sungyong Seo and Yan Liu. Differentiable physics-informed graph networks.arXiv preprint arXiv:1902.02950,
work page internal anchor Pith review Pith/arXiv arXiv 1902
-
[14]
doi:https://doi.org/10.1016/j.neunet.2021.04.018
ISSN 0893-6080. doi:https://doi.org/10.1016/j.neunet.2021.04.018. URL https: //www.sciencedirect.com/science/article/pii/S0893608021001556. Nobuyuki Umetani and Bernd Bickel. Learning three-dimensional flow for interactive aerodynamic design.ACM Transactions on Graphics (TOG), 37(4):1–10,
-
[15]
Nils Wandel, Michael Weinmann, and Reinhard Klein. Learning incompressible fluid dynamics from scratch–towards fast, differentiable fluid models that generalize.arXiv preprint arXiv:2006.08762,
-
[16]
A PROOFS A.1 PROOF OFLEMMA2.1 Proof.Remember Z(y) = Z U exp (−Φ(u;y)) dPu;P u :=g #Pz. Thus, assuming the relevant measurabilities, Z(y) = Z U exp (−Φ(u;y)) d(g#Pz) = Z Z exp (−Φ(g(u);y)) dPz, 13 where second equality is given by Theorem 3.6.1 in Bogachev & Ruas (2007). Applying the same equality,∀A∈ F, Pu|y(A) = 1 Z(y) Z A exp (−Φ(u;y)) d(g #Pz) = 1 Z(y)...
work page 2007
-
[17]
The rectangle, airfoil, and car examples are run on a single RTX4090 GPU
with maximum marginal likelihood estimation of the hyperparameters. The rectangle, airfoil, and car examples are run on a single RTX4090 GPU. The terrain example is run in a multi-GPU manner. B.2 GENERALIZEDAGGREGATIONNETWORK(GEN) For the graph-based autoencoder applied to the flow over complex terrain, we replace standard GCN layers with Generalized Aggr...
work page 2020
-
[18]
B.3.3 TRANSFORMERGABI As our framework is architecture-agnostic, we also test a Transformer-based variant. Transformers can function as neural operators (Cao, 2021), achieving non-locality through attention mechanisms. Unlike the graph-based approach, this variant treats the input as an unordered point set with coordi- nates, without exploiting the underl...
work page 2021
-
[19]
We keep 100 samples as being drawn from the posterior
Pred:Once trained, at inference time, in GABI-ABC we decode 50k samples in 100 batches of 500 samples. We keep 100 samples as being drawn from the posterior. B.5.2 ADDITIONALRESULTS In Figure 12 we show some example geometries along with the forcing function to and resonance field to reconstruct. In Figure 13 we show 3 random draws from the prior for a gi...
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.