Unify Robot Actions in Camera Frame
Pith reviewed 2026-05-17 21:13 UTC · model grok-4.3
pith:5QU5RVJ6 Add to your LaTeX paper
What is a Pith Number?\usepackage{pith}
\pithnumber{5QU5RVJ6}
Prints a linked pith:5QU5RVJ6 badge after your title and writes the identifier into PDF metadata. Compiles on arXiv with no extra files. Learn more
The pith
Unifying robot actions in the camera frame creates consistent geometric semantics across embodiments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
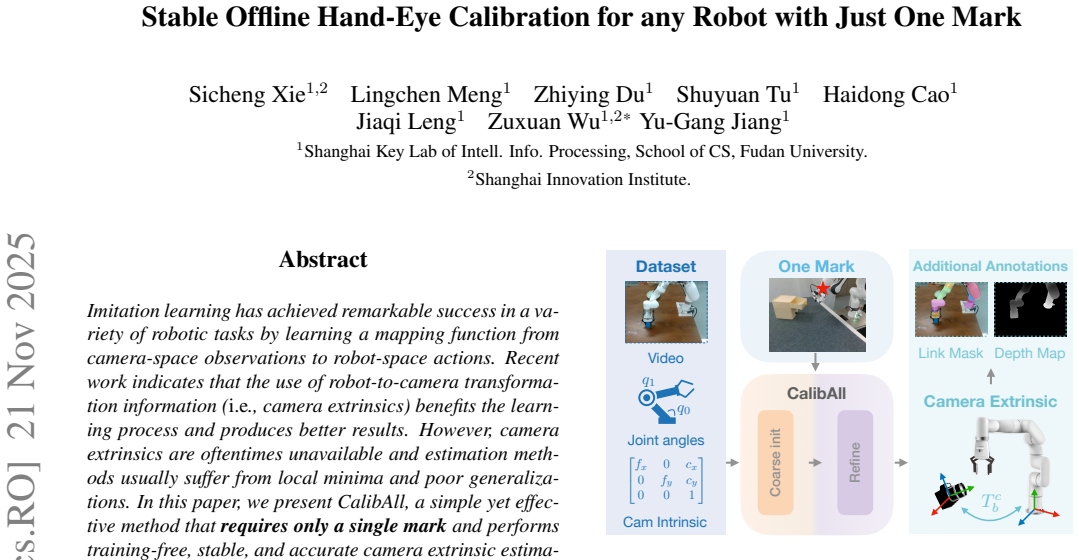
By estimating camera extrinsics, robot actions are converted to the camera coordinate system where they share consistent geometric semantics independent of the specific robot embodiment. CalibAll achieves this annotation for offline datasets through a coarse-to-fine process consisting of temporal PnP initialization followed by differentiable rendering refinement, resulting in standardized camera-frame TCP-pose actions applicable to single-arm and bimanual setups.
What carries the argument
CalibAll, a training-free pipeline that estimates camera extrinsics via temporal PnP initialization and differentiable rendering refinement to unify actions in the camera frame.
Load-bearing premise
The estimated camera extrinsics must accurately reflect the true geometry so that action semantics remain consistent when moving between different robot embodiments.
What would settle it
If experiments show that pretraining with camera-frame actions does not surpass current methods that use embodiment-specific action heads, the advantage of unification would be called into question.
Figures








read the original abstract
Cross-embodiment robot learning requires a unified action representation with consistent semantics across robot platforms. Existing representations suffer from platform-specific inconsistencies, while current solutions either maintain embodiment-specific action heads or learn latent action spaces, without fundamentally resolving the mismatch. We propose to unify robot actions in the camera frame using camera extrinsics, so that actions share consistent geometric semantics across different robot embodiments, including both single-arm and bimanual robots. However, most existing datasets lack camera extrinsic annotations, and existing offline calibration methods either suffer from local minima or require robot-specific training data. To address this gap, we present CalibAll, a training-free, robot-independent annotation pipeline that estimates camera extrinsics for offline datasets and converts heterogeneous robot actions into standardized camera-frame actions. CalibAll follows a coarse-to-fine calibration strategy: temporal PnP provides a stable initialization, followed by differentiable rendering-based refinement for high precision. Beyond extrinsics, CalibAll produces standardized TCP-pose actions and auxiliary annotations. We apply CalibAll to 16 datasets across 4 robot platforms, producing approximately 97K calibrated data episodes. Downstream simulation and real-robot experiments show that cross-embodiment pretraining with camera-frame actions achieves state-of-the-art performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes unifying heterogeneous robot actions into a camera-frame representation using estimated camera extrinsics. It introduces CalibAll, a training-free, robot-independent coarse-to-fine calibration pipeline (temporal PnP initialization followed by differentiable rendering refinement) that annotates offline datasets lacking extrinsic labels. The method is applied to 16 datasets across 4 robot platforms to produce ~97K calibrated episodes with standardized TCP-pose actions. Downstream simulation and real-robot experiments then demonstrate that cross-embodiment pretraining with these camera-frame actions achieves state-of-the-art performance.
Significance. If the reported calibration precision is sufficient to preserve consistent geometric semantics across embodiments, the approach offers a simple, geometrically grounded alternative to embodiment-specific action heads or learned latent spaces. The scale of application (16 datasets, 4 platforms) and the downstream SOTA claims would represent a practical contribution to cross-embodiment robot learning.
major comments (2)
- [Abstract] Abstract and experimental section: the claim that camera-frame actions achieve SOTA cross-embodiment performance rests on the unverified assumption that CalibAll recovers extrinsics accurate enough for consistent semantics. No reprojection error, pose error versus ground truth, ablation on the differentiable-rendering refinement step, or comparison against alternative extrinsic estimators is reported for the 16 datasets.
- [Method] Method description of the coarse-to-fine pipeline: without quantitative metrics on residual rotation/translation error after refinement, it is impossible to determine whether any remaining mismatch is smaller than the reported unification benefit, undermining the central claim that actions share consistent geometric semantics across single-arm and bimanual embodiments.
minor comments (2)
- Clarify the precise definition and standardization procedure for camera-frame TCP-pose actions, especially how they are adapted for bimanual robots.
- Add a table or section summarizing the 4 robot platforms, camera setups, and dataset characteristics to help readers assess the diversity of the 16 datasets.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript accordingly to strengthen the validation of CalibAll.
read point-by-point responses
-
Referee: [Abstract] Abstract and experimental section: the claim that camera-frame actions achieve SOTA cross-embodiment performance rests on the unverified assumption that CalibAll recovers extrinsics accurate enough for consistent semantics. No reprojection error, pose error versus ground truth, ablation on the differentiable-rendering refinement step, or comparison against alternative extrinsic estimators is reported for the 16 datasets.
Authors: We agree that direct quantitative validation of extrinsic accuracy is necessary to support the SOTA claims. Ground-truth extrinsics are unavailable for most of the 16 datasets, so pose error versus ground truth cannot be computed universally. In the revised manuscript we will report reprojection errors across the datasets, add an ablation isolating the differentiable rendering refinement step, and include comparisons to alternative extrinsic estimators on the subsets that possess ground-truth labels. These additions will demonstrate that residual errors remain small relative to the observed unification benefits. revision: yes
-
Referee: [Method] Method description of the coarse-to-fine pipeline: without quantitative metrics on residual rotation/translation error after refinement, it is impossible to determine whether any remaining mismatch is smaller than the reported unification benefit, undermining the central claim that actions share consistent geometric semantics across single-arm and bimanual embodiments.
Authors: We acknowledge the value of residual error metrics after refinement for assessing whether mismatches affect semantic consistency. The revised manuscript will include quantitative rotation and translation residuals post-refinement together with a discussion relating these errors to the scale of the unification gains reported in the experiments. This will clarify that the remaining mismatch does not undermine the geometric consistency claim. revision: yes
- Ground-truth pose error cannot be reported for the majority of the 16 datasets because they lack ground-truth extrinsic annotations.
Circularity Check
No significant circularity; calibration uses independent standard CV primitives
full rationale
The paper's core derivation applies standard, externally validated computer-vision methods (temporal PnP for initialization and differentiable rendering for refinement) to estimate camera extrinsics on existing datasets. These primitives are independent of the robot-learning results and do not depend on the claimed cross-embodiment gains. The unification step simply transforms TCP-pose actions into camera-frame coordinates using the recovered extrinsics; the SOTA performance is then shown via separate downstream pretraining experiments on the resulting ~97K episodes. No equations, definitions, or self-citations reduce the performance claim to a quantity fitted from the same data or defined circularly by construction. The pipeline remains self-contained against external CV benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Pinhole camera model with known intrinsics
- domain assumption Differentiable rendering can produce gradients that improve extrinsic estimates without embodiment-specific supervision
Reference graph
Works this paper leans on
-
[1]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. A vision-language- action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024. 1, 2, 8
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[2]
Linghao Chen, Yuzhe Qin, Xiaowei Zhou, and Hao Su. Easyhec: Accurate and automatic hand-eye calibration via differentiable rendering and space exploration.RA-L, 2023. 1, 2, 3, 4, 5
work page 2023
-
[3]
Diffusion policy: Visuomotor policy learning via action dif- fusion.IJRR, 2025
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action dif- fusion.IJRR, 2025. 1
work page 2025
-
[4]
Hand-eye calibration using dual quaternions.IJRR, 1999
Konstantinos Daniilidis. Hand-eye calibration using dual quaternions.IJRR, 1999. 2, 3
work page 1999
-
[5]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy. An image is worth 16x16 words: Transformers for image recognition at scale.arXiv preprint arXiv:2010.11929, 2020. 2
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[6]
Hongjie Fang, Chenxi Wang, Yiming Wang, Jingjing Chen, Shangning Xia, Jun Lv, Zihao He, Xiyan Yi, Yunhan Guo, Xinyu Zhan, et al. Airexo-2: Scaling up generalizable robotic imitation learning with low-cost exoskeletons.arXiv preprint arXiv:2503.03081, 2025. 1, 2
-
[7]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Zipeng Fu, Tony Z Zhao, and Chelsea Finn. Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleoperation.arXiv preprint arXiv:2401.02117,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Easy- hec++: Fully automatic hand-eye calibration with pretrained image models
Zhengdong Hong, Kangfu Zheng, and Linghao Chen. Easy- hec++: Fully automatic hand-eye calibration with pretrained image models. InIROS, 2024. 1, 4, 5
work page 2024
-
[9]
Robust robot-camera calibra- tion
Jarmo Ilonen and Ville Kyrki. Robust robot-camera calibra- tion. InICAR, 2011. 2
work page 2011
-
[10]
$\pi_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, et al. a vision-language-action model with open-world generaliza- tion.arXiv preprint arXiv:2504.16054, 2025. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
Rlbench: The robot learning benchmark & learning environment.RA-L, 2020
Stephen James, Zicong Ma, David Rovick Arrojo, and An- drew J Davison. Rlbench: The robot learning benchmark & learning environment.RA-L, 2020. 1
work page 2020
-
[12]
Tianchong Jiang, Jingtian Ji, Xiangshan Tan, Jiading Fang, Anand Bhattad, Vitor Guizilini, and Matthew R Walter. Do you know where your camera is? view-invariant pol- icy learning with camera conditioning.arXiv preprint arXiv:2510.02268, 2025. 1, 2
-
[13]
Co- tracker: It is better to track together
Nikita Karaev, Ignacio Rocco, Benjamin Graham, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Co- tracker: It is better to track together. InECCV, 2024. 2, 3, 10
work page 2024
-
[14]
Co- tracker3: Simpler and better point tracking by pseudo- labelling real videos
Nikita Karaev, Yuri Makarov, Jianyuan Wang, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Co- tracker3: Simpler and better point tracking by pseudo- labelling real videos. InICCV, 2025. 2, 3, 10
work page 2025
-
[15]
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Alexander Khazatsky, Karl Pertsch, Suraj Nair, Ash- win Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, Mohan Kumar Srirama, Lawrence Yun- liang Chen, Kirsty Ellis, et al. Droid: A large-scale in-the-wild robot manipulation dataset.arXiv preprint arXiv:2403.12945, 2024. 7, 8, 10
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[16]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
Single-view robot pose and joint angle estimation via render & compare
Yann Labb ´e, Justin Carpentier, Mathieu Aubry, and Josef Sivic. Single-view robot pose and joint angle estimation via render & compare. InCVPR, 2021. 5
work page 2021
-
[18]
Modular primitives for high-performance differentiable rendering.ToG, 2020
Samuli Laine, Janne Hellsten, Tero Karras, Yeongho Seol, Jaakko Lehtinen, and Timo Aila. Modular primitives for high-performance differentiable rendering.ToG, 2020. 4
work page 2020
-
[19]
Camera-to-robot pose estimation from a single image
Timothy E Lee, Jonathan Tremblay, Thang To, Jia Cheng, Terry Mosier, Oliver Kroemer, Dieter Fox, and Stan Birch- field. Camera-to-robot pose estimation from a single image. InICRA, 2020. 2, 5, 6, 7
work page 2020
-
[20]
Phantom: Training robots without robots using only human videos, 2025
Marion Lepert, Jiaying Fang, and Jeannette Bohg. Phantom: Training robots without robots using only human videos. arXiv preprint arXiv:2503.00779, 2025. 1, 2
-
[21]
Ep n p: An accurate o (n) solution to the p n p problem.IJCV,
Vincent Lepetit, Francesc Moreno-Noguer, and Pascal Fua. Ep n p: An accurate o (n) solution to the p n p problem.IJCV,
-
[22]
Prompting depth anything for 4k resolution accurate metric depth estimation
Haotong Lin, Sida Peng, Jingxiao Chen, Songyou Peng, Ji- aming Sun, Minghuan Liu, Hujun Bao, Jiashi Feng, Xiaowei Zhou, and Bingyi Kang. Prompting depth anything for 4k resolution accurate metric depth estimation. InCVPR, 2025. 7
work page 2025
-
[23]
Libero: Benchmarking knowl- edge transfer for lifelong robot learning.NeurIPS, 2023
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. Libero: Benchmarking knowl- edge transfer for lifelong robot learning.NeurIPS, 2023. 1
work page 2023
-
[24]
Grounding dino: Marrying dino with grounded pre-training for open-set object detection
Shilong Liu, Zhaoyang Zeng, Tianhe Ren, Feng Li, Hao Zhang, Jie Yang, Qing Jiang, Chunyuan Li, Jianwei Yang, Hang Su, et al. Grounding dino: Marrying dino with grounded pre-training for open-set object detection. In ECCV, 2024. 3
work page 2024
-
[25]
Markerless camera-to-robot pose estimation via self-supervised sim-to- real transfer
Jingpei Lu, Florian Richter, and Michael C Yip. Markerless camera-to-robot pose estimation via self-supervised sim-to- real transfer. InCVPR, 2023. 2, 5
work page 2023
-
[26]
Ctrnet-x: Camera-to- robot pose estimation in real-world conditions using a single camera
Jingpei Lu, Zekai Liang, Tristin Xie, Florian Richter, Shan Lin, Sainan Liu, and Michael C Yip. Ctrnet-x: Camera-to- robot pose estimation in real-world conditions using a single camera. InICRA, 2025. 2, 3, 5
work page 2025
-
[27]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Viktor Makoviychuk, Lukasz Wawrzyniak, Yunrong Guo, Michelle Lu, Kier Storey, Miles Macklin, David Hoeller, Nikita Rudin, Arthur Allshire, Ankur Handa, et al. Isaac gym: High performance gpu-based physics simulation for robot learning.arXiv preprint arXiv:2108.10470, 2021. 1
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[28]
Segic: Unleashing the emergent correspondence for in-context segmentation
Lingchen Meng, Shiyi Lan, Hengduo Li, Jose M Alvarez, Zuxuan Wu, and Yu-Gang Jiang. Segic: Unleashing the emergent correspondence for in-context segmentation. In ECCV, 2024. 3
work page 2024
-
[29]
DINOv2: Learning Robust Visual Features without Supervision
Maxime Oquab, Timoth ´ee Darcet, Th ´eo Moutakanni, Huy V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision. arXiv preprint arXiv:2304.07193, 2023. 2, 4
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[30]
Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0
Abby O’Neill, Abdul Rehman, Abhiram Maddukuri, Ab- hishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Poo- ley, Agrim Gupta, Ajay Mandlekar, Ajinkya Jain, et al. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. InICRA, 2024. 1, 2
work page 2024
-
[31]
Robot sensor calibration: solving ax= xb on the euclidean group.T-RO, 1994
Frank C Park and Bryan J Martin. Robot sensor calibration: solving ax= xb on the euclidean group.T-RO, 1994. 2, 3
work page 1994
-
[32]
Learn- ing transferable visual models from natural language super- vision
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learn- ing transferable visual models from natural language super- vision. InICML, 2021. 1
work page 2021
-
[33]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman R¨adle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024. 3, 8
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[34]
Grounding DINO 1.5: Advance the “edge” of open-set object detection
Tianhe Ren, Qing Jiang, Shilong Liu, Zhaoyang Zeng, Wen- long Liu, Han Gao, Hongjie Huang, Zhengyu Ma, Xiaoke Jiang, Yihao Chen, et al. Grounding dino 1.5: Advance the” edge” of open-set object detection.arXiv preprint arXiv:2405.10300, 2024. 3
-
[35]
Emergent correspondence from image diffusion.NeurIPS, 2023
Luming Tang, Menglin Jia, Qianqian Wang, Cheng Perng Phoo, and Bharath Hariharan. Emergent correspondence from image diffusion.NeurIPS, 2023. 2, 3
work page 2023
-
[36]
A new technique for fully autonomous and efficient 3 d robotics hand/eye calibra- tion.T-RO, 1989
Roger Y Tsai, Reimar K Lenz, et al. A new technique for fully autonomous and efficient 3 d robotics hand/eye calibra- tion.T-RO, 1989. 2, 3
work page 1989
-
[37]
Mim- icplay: Long-horizon imitation learning by watching hu- man play
Chen Wang, Linxi Fan, Jiankai Sun, Ruohan Zhang, Li Fei- Fei, Danfei Xu, Yuke Zhu, and Anima Anandkumar. Mim- icplay: Long-horizon imitation learning by watching human play.arXiv preprint arXiv:2302.12422, 2023. 1, 2
-
[38]
Meta- world: A benchmark and evaluation for multi-task and meta reinforcement learning
Tianhe Yu, Deirdre Quillen, Zhanpeng He, Ryan Julian, Karol Hausman, Chelsea Finn, and Sergey Levine. Meta- world: A benchmark and evaluation for multi-task and meta reinforcement learning. InCoRL, 2020. 1
work page 2020
-
[39]
DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection
Hao Zhang, Feng Li, Shilong Liu, Lei Zhang, Hang Su, Jun Zhu, Lionel M Ni, and Heung-Yeung Shum. Dino: Detr with improved denoising anchor boxes for end-to-end object detection.arXiv preprint arXiv:2203.03605, 2022. 2
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[40]
Shiduo Zhang, Zhe Xu, Peiju Liu, Xiaopeng Yu, Yuan Li, Qinghui Gao, Zhaoye Fei, Zhangyue Yin, Zuxuan Wu, Yu- Gang Jiang, et al. Vlabench: A large-scale benchmark for language-conditioned robotics manipulation with long- horizon reasoning tasks. InICCV, 2025. 1
work page 2025
-
[41]
Tianyi Zhang, Haonan Duan, Haoran Hao, Yu Qiao, Jifeng Dai, and Zhi Hou. Grounding actions in camera space: Observation-centric vision-language-action policy.arXiv preprint arXiv:2508.13103, 2025. 1, 2
-
[42]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Tony Z Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn. Learning fine-grained bimanual manipulation with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023. 2
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[43]
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Mart ´ın- Mart´ın, Abhishek Joshi, Soroush Nasiriany, and Yifeng Zhu. robosuite: A modular simulation framework and benchmark for robot learning.arXiv preprint arXiv:2009.12293, 2020. 1
work page internal anchor Pith review Pith/arXiv arXiv 2009
-
[44]
Rt-2: Vision-language-action models transfer web knowledge to robotic control
Brianna Zitkovich, Tianhe Yu, Sichun Xu, Peng Xu, Ted Xiao, Fei Xia, Jialin Wu, Paul Wohlhart, Stefan Welker, Ayzaan Wahid, et al. Rt-2: Vision-language-action models transfer web knowledge to robotic control. InCoRL, 2023. 1, 2
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.