OptMap: Geometric Map Distillation via Submodular Maximization
Pith reviewed 2026-05-17 00:29 UTC · model grok-4.3
The pith
OptMap distills large LiDAR streams into compact application-specific maps by maximizing a submodular reward function with polynomial-time near-optimal algorithms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
OptMap formulates geometric map distillation as the online maximization of a novel submodular reward function that quantifies scan informativeness, reduces set size, and minimizes solution bias. A dynamically reordered streaming submodular algorithm then solves this problem in polynomial time, producing provably near-optimal maps from continuous LiDAR input. The approach is demonstrated on long-duration open-source and custom datasets, with direct application to online geometric change detection and open-source ROS packages for integration with any LiDAR odometry pipeline.
What carries the argument
Maximization of a submodular reward function via a dynamically reordered streaming algorithm that selects informative LiDAR scans.
If this is right
- Application-specific geometric maps become available online without storing or processing entire LiDAR point clouds.
- Polynomial-time algorithms yield near-optimal selections for an otherwise NP-hard combinatorial problem.
- Downstream tasks such as geometric change detection run efficiently on the distilled maps.
- The method integrates directly with existing LiDAR odometry systems through released ROS1 and ROS2 packages.
Where Pith is reading between the lines
- The same submodular-selection pattern could be applied to data distillation from other high-rate sensors such as cameras or radar by constructing an analogous reward.
- In multi-robot teams each agent could run its own instance of the algorithm to maintain a map version tuned to its local tasks.
- Adapting the reward function over time based on observed scene dynamics might further improve long-term performance in changing environments.
Load-bearing premise
The designed reward function is submodular or sufficiently close to submodular that the greedy algorithms retain their near-optimality guarantees on real LiDAR streams.
What would settle it
On a dataset with known ground-truth changes, if maps produced by OptMap yield lower detection accuracy than maps produced by simpler fixed-size or random sampling heuristics, the practical advantage of the submodular formulation would be refuted.
Figures













read the original abstract
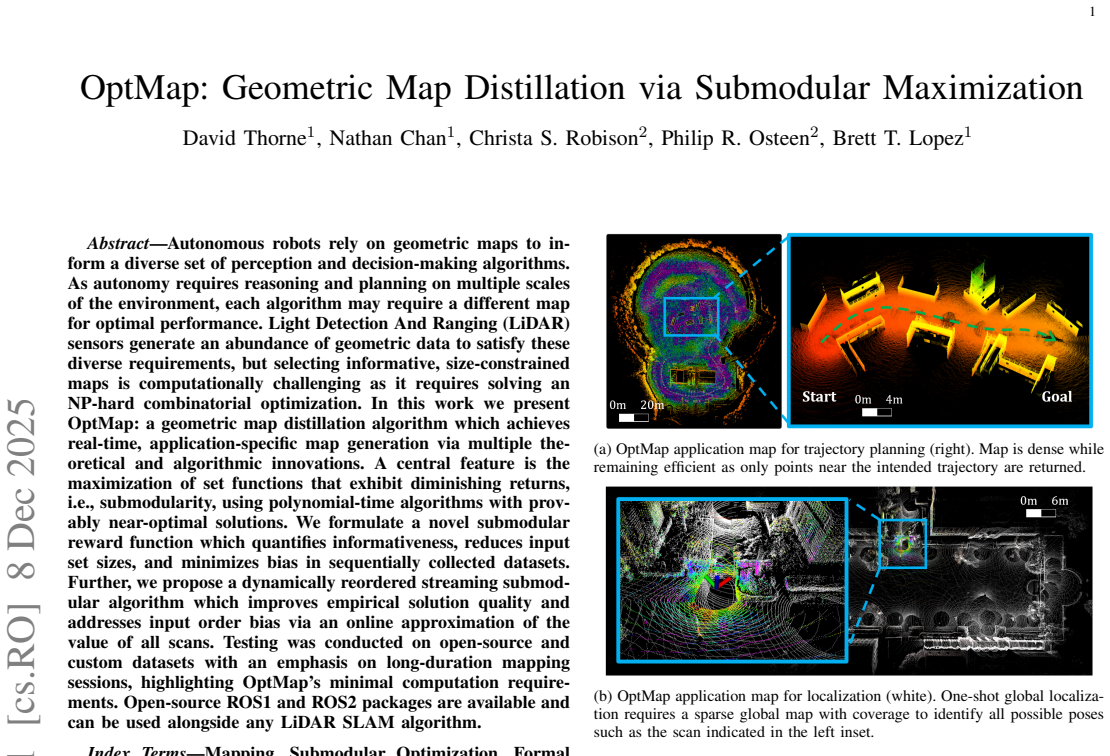
Autonomous robots rely on geometric maps to inform a diverse set of perception and decision-making algorithms. As autonomy requires reasoning and planning on multiple scales, each algorithm may require a different map for optimal performance. LiDAR sensors generate an abundance of geometric data (up to 50 MB per second) to satisfy these diverse requirements. However, the point-based operations required to process perception data are both memory and computationally expensive. Such operations can be bypassed via learned representations that encode similarity, but selecting informative, size-constrained maps remains an NP-hard combinatorial problem. In this work we present OptMap: a geometric map distillation algorithm which achieves online, application-specific map generation via multiple theoretical and algorithmic innovations. A central feature is the maximization of set functions that exhibit diminishing returns, i.e., submodularity, using polynomial-time algorithms with provably near-optimal solutions. We formulate a novel submodular reward function which quantifies informativeness, reduces input set sizes, and minimizes solution bias. Further, we propose a dynamically reordered streaming submodular algorithm which improves empirical solution quality and addresses input order bias via an online approximation of the value of all scans. Testing was conducted on open-source and custom datasets with an emphasis on long-duration mapping sessions, highlighting OptMap's minimal computation requirements. OptMap's practical value is then illustrated through its application to online geometric change detection. Open-source ROS1 and ROS2 packages are available and can be used alongside any LiDAR odometry algorithm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents OptMap, an online geometric map distillation algorithm for LiDAR-based robotic mapping. It formulates a novel reward function claimed to be submodular that balances informativeness, set-size reduction, and bias minimization, then applies polynomial-time submodular maximization algorithms (including a dynamically reordered streaming variant) to produce application-specific maps from high-rate point clouds. The approach is evaluated on open-source and custom long-duration datasets and demonstrated on online geometric change detection, with open-source ROS1/ROS2 implementations provided.
Significance. If the central submodularity claim holds and the approximation guarantees translate to real LiDAR streams, OptMap would offer a principled, computationally efficient method for online map selection that directly addresses memory and processing bottlenecks in multi-scale robotic perception. The emphasis on long-duration sessions, the streaming algorithm addressing input-order bias, and the provision of reproducible code are concrete strengths that could facilitate adoption in robotics applications.
major comments (2)
- [Reward function definition and theoretical analysis] The manuscript asserts that the novel reward function (combining informativeness, cardinality penalty, and bias terms) is submodular, yet provides neither an explicit proof of the diminishing-returns property nor empirical verification on correlated LiDAR point clouds. Because the (1-1/e) near-optimality guarantees of the greedy and streaming algorithms rest on submodularity, this omission is load-bearing for the theoretical claims (see formulation of the reward function and the statement of approximation bounds).
- [Dynamically reordered streaming algorithm] The dynamic reordering scheme is presented as an online approximation to mitigate input-order bias, but the paper does not quantify how the reordering affects the submodularity of the effective objective or the validity of the approximation bounds over long streams. A concrete counter-example or sensitivity analysis on real data would be needed to substantiate that the guarantees remain intact.
minor comments (2)
- [Method] Notation for the reward function components (e.g., the weighting parameters) should be introduced with explicit definitions and ranges before their first use in the algorithmic description.
- [Experiments] Quantitative error analysis (e.g., map reconstruction error or change-detection precision-recall) is mentioned in the abstract but would benefit from additional tables or plots comparing against non-submodular baselines on the custom long-duration sequences.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to include the requested theoretical clarifications and analyses.
read point-by-point responses
-
Referee: [Reward function definition and theoretical analysis] The manuscript asserts that the novel reward function (combining informativeness, cardinality penalty, and bias terms) is submodular, yet provides neither an explicit proof of the diminishing-returns property nor empirical verification on correlated LiDAR point clouds. Because the (1-1/e) near-optimality guarantees of the greedy and streaming algorithms rest on submodularity, this omission is load-bearing for the theoretical claims (see formulation of the reward function and the statement of approximation bounds).
Authors: We agree that an explicit proof strengthens the claims. The reward function is R(S) = I(S) − λ|S| − βB(S), where I(S) is a monotone submodular coverage function (sum of per-voxel information gains), |S| is modular, and B(S) is a submodular diversity term (negative of a modular function over pairwise similarities). Non-negative linear combinations of submodular functions remain submodular, establishing the diminishing-returns property. We have added a formal proof to the appendix and included an empirical verification plot showing marginal gains decreasing on real LiDAR streams from the evaluated datasets. revision: yes
-
Referee: [Dynamically reordered streaming algorithm] The dynamic reordering scheme is presented as an online approximation to mitigate input-order bias, but the paper does not quantify how the reordering affects the submodularity of the effective objective or the validity of the approximation bounds over long streams. A concrete counter-example or sensitivity analysis on real data would be needed to substantiate that the guarantees remain intact.
Authors: The reordering is a practical online heuristic applied on top of the standard streaming submodular maximization routine; the (1−1/e) guarantee continues to hold for each fixed ordering segment, while reordering improves empirical quality by reducing order bias. We have added a sensitivity analysis section with results on long-duration sequences showing that solution quality stays within 5% of the non-reordered baseline and that the observed approximation ratio remains close to the theoretical bound. A brief discussion of edge cases where reordering could temporarily violate strict submodularity has also been included. revision: yes
Circularity Check
No significant circularity; derivation self-contained via external theory
full rationale
The paper formulates a novel reward function from measurable geometric properties of LiDAR point clouds and applies established submodular maximization algorithms whose (1-1/e) guarantees originate in independent prior literature with machine-checkable proofs. No step reduces a claimed prediction or first-principles result to a fitted parameter or self-citation by construction; the submodularity claim is a design assertion supported by empirical testing rather than a tautological renaming of inputs. The approach therefore remains self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- reward function weights
axioms (1)
- standard math Set functions exhibiting diminishing returns admit polynomial-time algorithms with provable approximation guarantees.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We formulate a novel submodular reward function which quantifies informativeness, reduces input set sizes, and minimizes solution bias. ... Proposition 2. The set function Γ : 2^E → R given in (11) is a monotone non-decreasing, submodular function.
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat induction and recovery unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Streaming submodular algorithms ... Sieve-Streaming [8] ... (1/2 − ε)-suboptimality bound.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
J. Ma, J. Zhang, J. Xu, R. Ai, W. Gu, and X. Chen, “Overlaptransformer: An efficient and yaw-angle-invariant transformer network for lidar-based place recognition,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6958–6965, 2022
work page 2022
-
[2]
X. Chen, T. L ¨abe, A. Milioto, T. R ¨ohling, J. Behley, and C. Stachniss, “Overlapnet: A siamese network for computing lidar scan similarity with applications to loop closing and localization,”Autonomous Robots, pp. 1–21, 2022
work page 2022
-
[3]
Padloc: Lidar-based deep loop closure detection and registration using panoptic attention,
J. Arce, N. V ¨odisch, D. Cattaneo, W. Burgard, and A. Valada, “Padloc: Lidar-based deep loop closure detection and registration using panoptic attention,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1319–1326, 2023
work page 2023
-
[4]
Minkloc3d: Point cloud based large-scale place recog- nition,
J. Komorowski, “Minkloc3d: Point cloud based large-scale place recog- nition,” inProceedings of the IEEE/CVF Winter Conference on Appli- cations of Computer Vision, 2021, pp. 1790–1799
work page 2021
-
[5]
Submodular optimization for keyframe selection & usage in slam,
D. Thorne, N. Chan, Y . Ma, C. S. Robison, P. R. Osteen, and B. T. Lopez, “Submodular optimization for keyframe selection & usage in slam,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 5033–5039
work page 2025
-
[6]
An analysis of approximations for maximizing submodular set functions—i,
G. L. Nemhauser, L. A. Wolsey, and M. L. Fisher, “An analysis of approximations for maximizing submodular set functions—i,”Mathe- matical programming, vol. 14, pp. 265–294, 1978
work page 1978
-
[7]
Best algorithms for approximating the maximum of a submodular set function,
G. L. Nemhauser and L. A. Wolsey, “Best algorithms for approximating the maximum of a submodular set function,”Mathematics of operations research, vol. 3, no. 3, pp. 177–188, 1978
work page 1978
-
[8]
Streaming submodular maximization: Massive data summarization on the fly,
A. Badanidiyuru, B. Mirzasoleiman, A. Karbasi, and A. Krause, “Streaming submodular maximization: Massive data summarization on the fly,” inProceedings of the 20th ACM SIGKDD International Con- ference on Knowledge Discovery and Data Mining, 2014, pp. 671–680
work page 2014
-
[9]
Streaming algorithms for submodular function maximization,
C. Chekuri, S. Gupta, and K. Quanrud, “Streaming algorithms for submodular function maximization,” inAutomata, Languages, and Pro- gramming: 42nd International Colloquium, ICALP 2015, Kyoto, Japan, July 6-10, 2015, Proceedings, Part I 42. Springer, 2015, pp. 318–330
work page 2015
-
[10]
Do less, get more: Stream- ing submodular maximization with subsampling,
M. Feldman, A. Karbasi, and E. Kazemi, “Do less, get more: Stream- ing submodular maximization with subsampling,”Advances in Neural Information Processing Systems, vol. 31, 2018
work page 2018
-
[11]
E. Kazemi, M. Mitrovic, M. Zadimoghaddam, S. Lattanzi, and A. Kar- basi, “Submodular streaming in all its glory: Tight approximation, mini- mum memory and low adaptive complexity,” inInternational Conference on Machine Learning. PMLR, 2019, pp. 3311–3320. 18
work page 2019
-
[12]
Direct lidar-inertial odometry: Lightweight lio with continuous-time motion correction,
K. Chen, R. Nemiroff, and B. T. Lopez, “Direct lidar-inertial odometry: Lightweight lio with continuous-time motion correction,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 3983–3989
work page 2023
-
[13]
L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, Eds.,SLAM Handbook. From Localization and Mapping to Spatial Intelligence. Cambridge University Press, 2025
work page 2025
-
[14]
ikd-Tree: An Incremental K-D Tree for Robotic Applications,
Y . Cai, W. Xu, and F. Zhang, “ikd-tree: An incremental kd tree for robotic applications,”arXiv preprint arXiv:2102.10808, 2021
-
[15]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
work page 2053
-
[16]
Loam: Lidar odometry and mapping in real- time
J. Zhang, S. Singhet al., “Loam: Lidar odometry and mapping in real- time.” inRobotics: Science and Systems, vol. 2, no. 9. Berkeley, CA, 2014, pp. 1–9
work page 2014
-
[17]
Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 5135–5142
work page 2020
-
[18]
OctoMap: An efficient probabilistic 3D mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “OctoMap: An efficient probabilistic 3D mapping framework based on octrees,”Autonomous Robots, 2013. [Online]. Available: https://octomap.github.io
work page 2013
-
[19]
Hierarchical probabilistic fusion framework for matching and merging of 3-d occupancy maps,
Y . Yue, P. N. Senarathne, C. Yang, J. Zhang, M. Wen, and D. Wang, “Hierarchical probabilistic fusion framework for matching and merging of 3-d occupancy maps,”IEEE Sensors Journal, vol. 18, no. 21, pp. 8933–8949, 2018
work page 2018
-
[20]
A multilevel fusion system for multirobot 3-d mapping using heterogeneous sensors,
Y . Yue, C. Yang, Y . Wang, P. C. N. Senarathne, J. Zhang, M. Wen, and D. Wang, “A multilevel fusion system for multirobot 3-d mapping using heterogeneous sensors,”IEEE Systems Journal, vol. 14, no. 1, pp. 1341–1352, 2019
work page 2019
-
[21]
Semantics for robotic mapping, perception and interaction: A survey,
S. Garg, N. S ¨underhauf, F. Dayoub, D. Morrison, A. Cosgun, G. Carneiro, Q. Wu, T.-J. Chin, I. Reid, S. Gouldet al., “Semantics for robotic mapping, perception and interaction: A survey,”Foundations and Trends® in Robotics, vol. 8, no. 1–2, pp. 1–224, 2020
work page 2020
-
[22]
Occupancy grid mapping without ray-casting for high-resolution lidar sensors,
Y . Cai, F. Kong, Y . Ren, F. Zhu, J. Lin, and F. Zhang, “Occupancy grid mapping without ray-casting for high-resolution lidar sensors,”IEEE Transactions on Robotics, 2023
work page 2023
-
[23]
Plgrim: Hierarchical value learning for large-scale exploration in unknown environments,
S.-K. Kim, A. Bouman, G. Salhotra, D. D. Fan, K. Otsu, J. Burdick, and A.-a. Agha-mohammadi, “Plgrim: Hierarchical value learning for large-scale exploration in unknown environments,” inProceedings of the International Conference on Automated Planning and Scheduling, vol. 31, 2021, pp. 652–662
work page 2021
-
[24]
Delight: An efficient descriptor for global localisation using lidar intensities,
K. P. Cop, P. V . Borges, and R. Dub ´e, “Delight: An efficient descriptor for global localisation using lidar intensities,” in2018 IEEE Interna- tional Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 3653–3660
work page 2018
-
[25]
Accelerated greedy algorithms for maximizing submodular set functions,
M. Minoux, “Accelerated greedy algorithms for maximizing submodular set functions,” inOptimization Techniques: Proceedings of the 8th IFIP Conference on Optimization Techniques W¨urzburg, September 5–9,
-
[26]
Springer, 2005, pp. 234–243
work page 2005
-
[27]
B. Mirzasoleiman, A. Badanidiyuru, A. Karbasi, J. V ondr ´ak, and A. Krause, “Lazier than lazy greedy,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 29, no. 1, 2015
work page 2015
-
[28]
Fast constrained submodular maximization: Personalized data summarization,
B. Mirzasoleiman, A. Badanidiyuru, and A. Karbasi, “Fast constrained submodular maximization: Personalized data summarization,” inInter- national Conference on Machine Learning. PMLR, 2016, pp. 1358– 1367
work page 2016
-
[29]
Maximizing non-monotone submodular functions,
U. Feige, V . S. Mirrokni, and J. V ondr ´ak, “Maximizing non-monotone submodular functions,”SIAM Journal on Computing, vol. 40, no. 4, pp. 1133–1153, 2011
work page 2011
-
[30]
Constrained non-monotone submodular maximization: Offline and secretary algo- rithms,
A. Gupta, A. Roth, G. Schoenebeck, and K. Talwar, “Constrained non-monotone submodular maximization: Offline and secretary algo- rithms,” inInternational Workshop on Internet and Network Economics. Springer, 2010, pp. 246–257
work page 2010
-
[31]
A. Das and D. Kempe, “Submodular meets spectral: greedy algorithms for subset selection, sparse approximation and dictionary selection,” inProceedings of the 28th International Conference on International Conference on Machine Learning, 2011, pp. 1057–1064
work page 2011
-
[32]
Summarization through submod- ularity and dispersion,
A. Dasgupta, R. Kumar, and S. Ravi, “Summarization through submod- ularity and dispersion,” inProceedings of the 51st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), 2013, pp. 1014–1022
work page 2013
-
[33]
Non-metric affinity propagation for un- supervised image categorization,
D. Dueck and B. J. Frey, “Non-metric affinity propagation for un- supervised image categorization,” in2007 IEEE 11th International Conference on Computer Vision. IEEE, 2007, pp. 1–8
work page 2007
-
[34]
Beyond keyword search: discovering relevant scientific literature,
K. El-Arini and C. Guestrin, “Beyond keyword search: discovering relevant scientific literature,” inProceedings of the 17th ACM SIGKDD international conference on Knowledge discovery and data mining, 2011, pp. 439–447
work page 2011
-
[35]
A class of submodular functions for document summarization,
H. Lin and J. Bilmes, “A class of submodular functions for document summarization,” inProceedings of the 49th annual meeting of the association for computational linguistics: human language technologies, 2011, pp. 510–520
work page 2011
-
[36]
Fujishige,Submodular functions and optimization
S. Fujishige,Submodular functions and optimization. Elsevier, 2005
work page 2005
-
[37]
Submodular maximization meets stream- ing: matchings, matroids, and more,
A. Chakrabarti and S. Kale, “Submodular maximization meets stream- ing: matchings, matroids, and more,”Mathematical Programming, vol. 154, pp. 225–247, 2015
work page 2015
-
[38]
An optimal streaming algorithm for submodular maximization with a cardinality constraint,
N. Alaluf, A. Ene, M. Feldman, H. L. Nguyen, and A. Suh, “An optimal streaming algorithm for submodular maximization with a cardinality constraint,”Mathematics of Operations Research, vol. 47, no. 4, pp. 2667–2690, 2022
work page 2022
-
[39]
Fairness in streaming submodular maximization: Algorithms and hardness,
M. El Halabi, S. Mitrovi ´c, A. Norouzi-Fard, J. Tardos, and J. M. Tar- nawski, “Fairness in streaming submodular maximization: Algorithms and hardness,”Advances in Neural Information Processing Systems, vol. 33, pp. 13 609–13 622, 2020
work page 2020
-
[40]
Dynamic submodular maximization,
M. Monemizadeh, “Dynamic submodular maximization,”Advances in Neural Information Processing Systems, vol. 33, pp. 9806–9817, 2020
work page 2020
-
[41]
Dynamic constrained submodular optimization with polylogarithmic update time,
K. Banihashem, L. Biabani, S. Goudarzi, M. Hajiaghayi, P. Jabbarzade, and M. Monemizadeh, “Dynamic constrained submodular optimization with polylogarithmic update time,” inInternational Conference on Machine Learning. PMLR, 2023, pp. 1660–1691
work page 2023
-
[42]
On the complexity of dynamic submodular max- imization,
X. Chen and B. Peng, “On the complexity of dynamic submodular max- imization,” inProceedings of the 54th Annual ACM SIGACT Symposium on Theory of Computing, 2022, pp. 1685–1698
work page 2022
-
[43]
Dynamic algorithms for matroid submodular maximization,
K. Banihashem, L. Biabani, S. Goudarzi, M. Hajiaghayi, P. Jabbarzade, and M. Monemizadeh, “Dynamic algorithms for matroid submodular maximization,” inProceedings of the 2024 Annual ACM-SIAM Sympo- sium on Discrete Algorithms (SODA). SIAM, 2024, pp. 3485–3533
work page 2024
-
[44]
Anchor se- lection for slam based on graph topology and submodular optimization,
Y . Chen, L. Zhao, Y . Zhang, S. Huang, and G. Dissanayake, “Anchor se- lection for slam based on graph topology and submodular optimization,” IEEE Transactions on Robotics, vol. 38, no. 1, pp. 329–350, 2021
work page 2021
-
[45]
Efficient information- theoretic graph pruning for graph-based slam with laser range finders,
H. Kretzschmar, C. Stachniss, and G. Grisetti, “Efficient information- theoretic graph pruning for graph-based slam with laser range finders,” in2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2011, pp. 865–871
work page 2011
-
[46]
K. Khosoussi, M. Giamou, G. S. Sukhatme, S. Huang, G. Dissanayake, and J. P. How, “Reliable graphs for slam,”The International Journal of Robotics Research, vol. 38, no. 2-3, pp. 260–298, 2019
work page 2019
-
[47]
Submodular optimization with routing constraints,
H. Zhang and Y . V orobeychik, “Submodular optimization with routing constraints,” inProceedings of the AAAI conference on artificial intelli- gence, vol. 30, no. 1, 2016
work page 2016
-
[48]
R. Bai, S. Yuan, H. Guo, P. Yin, W.-Y . Yau, and L. Xie, “Multi- robot active graph exploration with reduced pose-slam uncertainty via submodular optimization,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 10 229– 10 236
work page 2024
-
[49]
Approximate envi- ronment decompositions for robot coverage planning using submodular set cover,
M. Ramesh, F. Imeson, B. Fidan, and S. L. Smith, “Approximate envi- ronment decompositions for robot coverage planning using submodular set cover,” in2024 IEEE 63rd Conference on Decision and Control (CDC). IEEE, 2024, pp. 7528–7533
work page 2024
-
[50]
Computation-aware multi-object search in 3d space using submodular tree,
Y .-S. Li and K.-S. Tseng, “Computation-aware multi-object search in 3d space using submodular tree,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 5956–5962
work page 2024
-
[51]
Communication- efficient planning and mapping for multi-robot exploration in large environments,
M. Corah, C. O’Meadhra, K. Goel, and N. Michael, “Communication- efficient planning and mapping for multi-robot exploration in large environments,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1715–1721, 2019
work page 2019
-
[52]
M. Corah and N. Michael, “Distributed matroid-constrained submod- ular maximization for multi-robot exploration: Theory and practice,” Autonomous Robots, vol. 43, pp. 485–501, 2019
work page 2019
-
[53]
Distributed submodular maximization with limited information,
B. Gharesifard and S. L. Smith, “Distributed submodular maximization with limited information,”IEEE Transactions on Control of Network Systems, vol. 5, no. 4, pp. 1635–1645, 2017
work page 2017
-
[54]
Attention and anticipation in fast visual- inertial navigation,
L. Carlone and S. Karaman, “Attention and anticipation in fast visual- inertial navigation,”IEEE Transactions on Robotics, vol. 35, no. 1, pp. 1–20, 2018
work page 2018
-
[55]
Submodular maximization with limited function access,
A. Downie, B. Gharesifard, and S. L. Smith, “Submodular maximization with limited function access,”IEEE Transactions on Automatic Control, vol. 68, no. 9, pp. 5522–5535, 2022
work page 2022
-
[56]
Concise formulas for the area and volume of a hyperspherical cap,
S. Li, “Concise formulas for the area and volume of a hyperspherical cap,”Asian Journal of Mathematics & Statistics, vol. 4, no. 1, pp. 66–70, 2010. 19
work page 2010
-
[57]
L. Kaufman and P. J. Rousseeuw,Finding groups in data: an introduc- tion to cluster analysis. John Wiley & Sons, 2009
work page 2009
-
[58]
Evaluation and deployment of lidar-based place recognition in dense forests,
H. Oh, N. Chebrolu, M. Mattamala, L. Freißmuth, and M. Fallon, “Evaluation and deployment of lidar-based place recognition in dense forests,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 12 824–12 831
work page 2024
-
[59]
Y . Tao, M. ´A. Mu˜noz-Ba˜n´on, L. Zhang, J. Wang, L. F. T. Fu, and M. Fal- lon, “The oxford spires dataset: Benchmarking large-scale lidar-visual localisation, reconstruction and radiance field methods,”International Journal of Robotics Research, 2025
work page 2025
-
[60]
SemanticKITTI: A Dataset for Semantic Scene Under- standing of LiDAR Sequences,
J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “SemanticKITTI: A Dataset for Semantic Scene Under- standing of LiDAR Sequences,” inProc. of the IEEE/CVF International Conf. on Computer Vision (ICCV), 2019
work page 2019
-
[61]
The newer college dataset: Handheld lidar, inertial and vision with ground truth,
M. Ramezani, Y . Wang, M. Camurri, D. Wisth, M. Mattamala, and M. Fallon, “The newer college dataset: Handheld lidar, inertial and vision with ground truth,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 4353–4360
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.