LEO-RobotAgent: A General-purpose Robotic Agent for Language-driven Embodied Operator
Pith reviewed 2026-05-16 23:17 UTC · model grok-4.3
The pith
Streamlined LEO-RobotAgent framework lets LLMs control UAVs, arms, and wheeled robots for unpredictable tasks via language.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
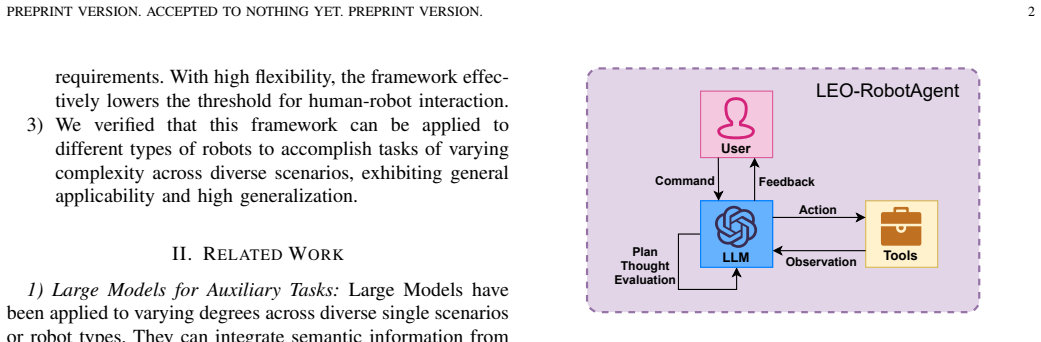
LEO-RobotAgent supplies a streamlined structure in which LLMs independently think, plan, and act by flexibly calling tools from a modular, easily registrable toolset and collaborating with humans through an integrated interaction mechanism, allowing the same framework to adapt across UAVs, robotic arms, and wheeled robots for efficient execution of tasks at varying complexity levels.
What carries the argument
The streamlined agent framework containing a modular and registrable toolset plus a human-robot interaction mechanism that lets LLMs call tools on demand and collaborate like partners.
If this is right
- LLMs gain the ability to operate UAVs, robotic arms, and wheeled robots under one framework instead of separate complex structures.
- A modular toolset allows the model to meet varying requirements by calling different tools as needed.
- Built-in human collaboration supports bidirectional intent understanding during task execution.
- Tasks spanning different complexity levels can be completed efficiently once the framework is registered to a platform.
- The overall system lowers the threshold for humans to direct robots across scenarios.
Where Pith is reading between the lines
- The same simple structure could support quick addition of new robot platforms by registering only the necessary tools.
- Adding vision or sensor tools to the registrable set might extend reliable performance in more unstructured real-world settings.
- The human-partner mechanism suggests the framework could scale to mixed human-robot teams on shared tasks.
- Similar streamlined designs might transfer to non-robotic embodied agents such as simulated environments or software controllers.
Load-bearing premise
A deliberately simple structure without the complex per-task designs of prior work is sufficient for LLMs to independently handle unpredictable tasks across robot types.
What would settle it
An experiment in which the same framework cannot be adapted to a new robot platform or complete one of the designed complex tasks without extra custom code or human overrides would disprove the general-purpose claim.
Figures







read the original abstract
We propose LEO-RobotAgent, a general-purpose language-driven intelligent agent framework for robots. Under this framework, LLMs can operate different types of robots to complete unpredictable complex tasks across various scenarios. This framework features strong generalization, robustness, and efficiency. The application-level system built around it can fully enhance bidirectional human-robot intent understanding and lower the threshold for human-robot interaction. Regarding robot task planning, the vast majority of existing studies focus on the application of large models in single-task scenarios and for single robot types. These algorithms often have complex structures and lack generalizability. Thus, the proposed LEO-RobotAgent framework is designed with a streamlined structure as much as possible, enabling large models to independently think, plan, and act within this clear framework. We provide a modular and easily registrable toolset, allowing large models to flexibly call various tools to meet different requirements. Meanwhile, the framework incorporates a human-robot interaction mechanism, enabling the algorithm to collaborate with humans like a partner. Experiments have verified that this framework can be easily adapted to mainstream robot platforms including unmanned aerial vehicles (UAVs), robotic arms, and wheeled robot, and efficiently execute a variety of carefully designed tasks with different complexity levels. Our code is available at https://github.com/LegendLeoChen/LEO-RobotAgent.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes LEO-RobotAgent, a streamlined general-purpose framework that enables LLMs to independently think, plan, and act on unpredictable complex tasks across robot platforms including UAVs, robotic arms, and wheeled robots. It emphasizes modular and registrable toolsets for flexible tool calling, a human-robot interaction mechanism for collaborative operation, and claims of strong generalization, robustness, and efficiency relative to prior complex single-task structures. Experiments are described as verifying easy adaptation to mainstream platforms and efficient execution of carefully designed tasks at varying complexity levels, with code released at a public repository.
Significance. If the experimental claims are properly substantiated with quantitative metrics and baselines, the work could offer a practical simplification for language-driven embodied agents, potentially lowering barriers to multi-platform deployment and human-robot collaboration in robotics. The open code release supports reproducibility, which strengthens the contribution if the framework's internal logic proves sound.
major comments (2)
- [Abstract] Abstract: The central claim that 'experiments have verified' easy adaptation to UAVs, robotic arms, and wheeled robots with efficient execution of complex tasks lacks any reported quantitative metrics (e.g., success rates, latency, or failure modes), task definitions, baseline comparisons to prior agents, or error analysis, rendering the generalization and efficiency assertions unevaluable.
- [Abstract] Abstract and experimental description: The reference to 'carefully designed tasks with different complexity levels' does not address how unpredictability or open-endedness is operationalized; without evidence that tasks involve genuine novelty rather than scripted scenarios, the support for the claim of handling 'unpredictable complex tasks' across platforms is insufficient.
minor comments (1)
- [Abstract] The abstract would benefit from a concise statement of the specific evaluation metrics and number of trials to allow readers to immediately gauge the strength of the reported verification.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript to strengthen the presentation of results and task descriptions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'experiments have verified' easy adaptation to UAVs, robotic arms, and wheeled robots with efficient execution of complex tasks lacks any reported quantitative metrics (e.g., success rates, latency, or failure modes), task definitions, baseline comparisons to prior agents, or error analysis, rendering the generalization and efficiency assertions unevaluable.
Authors: We agree that the abstract would be strengthened by including key quantitative results. In the revised version we will add a concise summary of success rates (e.g., 82% overall task completion across platforms), average execution latency, and brief baseline comparisons drawn from the experimental section, along with a short error-mode summary. revision: yes
-
Referee: [Abstract] Abstract and experimental description: The reference to 'carefully designed tasks with different complexity levels' does not address how unpredictability or open-endedness is operationalized; without evidence that tasks involve genuine novelty rather than scripted scenarios, the support for the claim of handling 'unpredictable complex tasks' across platforms is insufficient.
Authors: We will expand the experimental description in the revision to explicitly operationalize unpredictability. We will detail how each task incorporates dynamic, unforeseen elements (e.g., sudden obstacle appearance, novel object configurations, and real-time human overrides) that require on-the-fly replanning, and we will provide concrete examples distinguishing these from purely scripted sequences. revision: yes
Circularity Check
No circularity: framework proposal with no derivation chain
full rationale
The paper describes a proposed agent framework (streamlined structure, modular tools, human-robot interaction) and reports adaptation to UAVs/arms/wheeled robots on carefully designed tasks. No equations, fitted parameters, predictions, or uniqueness theorems appear in the provided text. Central claims rest on the framework description and external code repo rather than any self-referential reduction or self-citation load-bearing step. This matches the default non-circular case for system papers.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Large language models can independently think, plan, and act within a clear streamlined framework for complex tasks.
Reference graph
Works this paper leans on
-
[1]
Uavs meet llms: Overviews and perspectives towards agentic low-altitude mobility,
Y . Tian, F. Lin, Y . Li, T. Zhang, Q. Zhang, X. Fu, J. Huang, X. Dai, Y . Wang, C. Tianet al., “Uavs meet llms: Overviews and perspectives towards agentic low-altitude mobility,”Information Fusion, vol. 122, p. 103158, 2025
work page 2025
-
[2]
Large language models for robotics: A survey,
F. Zeng, W. Gan, Y . Wang, N. Liu, and P. S. Yu, “Large language models for robotics: A survey,”arXiv preprint arXiv:2311.07226, 2023
-
[3]
React: Synergizing reasoning and acting in language models,
S. Yao, J. Zhao, D. Yu, N. Du, I. Shafran, K. R. Narasimhan, and Y . Cao, “React: Synergizing reasoning and acting in language models,” inThe eleventh international conference on learning representations, 2022
work page 2022
-
[4]
Chat with the environment: Interactive multimodal perception using large language models,
X. Zhao, M. Li, C. Weber, M. B. Hafez, and S. Wermter, “Chat with the environment: Interactive multimodal perception using large language models,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 3590–3596
work page 2023
-
[5]
Task and motion planning with large language models for object rearrangement,
Y . Ding, X. Zhang, C. Paxton, and S. Zhang, “Task and motion planning with large language models for object rearrangement,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 2086–2092
work page 2023
-
[6]
Real: Resilience and adaptation using large language models on autonomous aerial robots,
A. Tagliabue, K. Kondo, T. Zhao, M. Peterson, C. T. Tewari, and J. P. How, “Real: Resilience and adaptation using large language models on autonomous aerial robots,” in2024 IEEE 63rd Conference on Decision and Control (CDC). IEEE, 2024, pp. 1539–1546
work page 2024
-
[7]
V . G. Goecks and N. R. Waytowich, “Disasterresponsegpt: Large lan- guage models for accelerated plan of action development in disaster response scenarios,”arXiv preprint arXiv:2306.17271, 2023
-
[8]
Z. Yuan, F. Xie, and T. Ji, “Patrol agent: An autonomous uav framework for urban patrol using on board vision language model and on cloud large language model,” in2024 6th International Conference on Robotics and Computer Vision (ICRCV). IEEE, 2024, pp. 237–242
work page 2024
-
[9]
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
I. Singh, V . Blukis, A. Mousavian, A. Goyal, D. Xu, J. Tremblay, D. Fox, J. Thomason, and A. Garg, “Progprompt: Generating situated robot task plans using large language models,”arXiv preprint arXiv:2209.11302, 2022
work page internal anchor Pith review arXiv 2022
-
[10]
Typefly: Flying drones with large language model,
G. Chen, X. Yu, N. Ling, and L. Zhong, “Typefly: Flying drones with large language model,”arXiv preprint arXiv:2312.14950, 2023
-
[11]
Deploying and evaluating llms to program service mobile robots,
Z. Hu, F. Lucchetti, C. Schlesinger, Y . Saxena, A. Freeman, S. Modak, A. Guha, and J. Biswas, “Deploying and evaluating llms to program service mobile robots,”IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 2853–2860, 2024
work page 2024
-
[12]
In- context learning enables robot action prediction in llms,
Y . Yin, Z. Wang, Y . Sharma, D. Niu, T. Darrell, and R. Herzig, “In- context learning enables robot action prediction in llms,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 8972–8979
work page 2025
-
[13]
R. Mon-Williams, G. Li, R. Long, W. Du, and C. G. Lucas, “Embodied large language models enable robots to complete complex tasks in unpredictable environments,”Nature Machine Intelligence, pp. 1–10, 2025
work page 2025
-
[14]
Agent as cerebrum, controller as cerebellum: Implementing an embodied lmm-based agent on drones,
H. Zhao, F. Pan, H. Ping, and Y . Zhou, “Agent as cerebrum, controller as cerebellum: Implementing an embodied lmm-based agent on drones,” arXiv preprint arXiv:2311.15033, 2023
-
[15]
Interactive planning using large language models for partially observable robotic tasks,
L. Sun, D. K. Jha, C. Hori, S. Jain, R. Corcodel, X. Zhu, M. Tomizuka, and D. Romeres, “Interactive planning using large language models for partially observable robotic tasks,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 14 054–14 061
work page 2024
-
[16]
Malmm: Multi- agent large language models for zero-shot robotics manipulation,
H. Singh, R. J. Das, M. Han, P. Nakov, and I. Laptev, “Malmm: Multi- agent large language models for zero-shot robotics manipulation,”arXiv preprint arXiv:2411.17636, 2024
-
[17]
Copal: corrective planning of robot actions with large language models,
F. Joublin, A. Ceravola, P. Smirnov, F. Ocker, J. Deigmoeller, A. Be- lardinelli, C. Wang, S. Hasler, D. Tanneberg, and M. Gienger, “Copal: corrective planning of robot actions with large language models,” in 2024 ieee international conference on robotics and automation (ICRA). IEEE, 2024, pp. 8664–8670
work page 2024
-
[18]
Palm-e: An embodied multimodal language model,
D. Driess, F. Xia, M. S. Sajjadi, C. Lynch, A. Chowdhery, A. Wahid, J. Tompson, Q. Vuong, T. Yu, W. Huanget al., “Palm-e: An embodied multimodal language model,” 2023
work page 2023
-
[19]
S. Zhang, Z. Xu, P. Liu, X. Yu, Y . Li, Q. Gao, Z. Fei, Z. Yin, Z. Wu, Y .-G. Jianget al., “Vlabench: A large-scale benchmark for language- conditioned robotics manipulation with long-horizon reasoning tasks,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 11 142–11 152
work page 2025
-
[20]
Qwen2.5-Coder Technical Report
B. Hui, J. Yang, Z. Cui, J. Yang, D. Liu, L. Zhang, T. Liu, J. Zhang, B. Yu, K. Luet al., “Qwen2. 5-coder technical report,”arXiv preprint arXiv:2409.12186, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
A. Yang, A. Li, B. Yang, B. Zhang, B. Hui, B. Zheng, B. Yu, C. Gao, C. Huang, C. Lvet al., “Qwen3 technical report,”arXiv preprint arXiv:2505.09388, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
General-purpose aerial intelligent agents empow- ered by large language models,
J. Zhao and X. Lin, “General-purpose aerial intelligent agents empow- ered by large language models,”arXiv preprint arXiv:2503.08302, 2025
-
[23]
Magebench: Bridging large multimodal models to agents,
M. Zhang, Q. Dai, Y . Yang, J. Bao, D. Chen, K. Qiu, C. Luo, X. Geng, and B. Guo, “Magebench: Bridging large multimodal models to agents,” arXiv preprint arXiv:2412.04531, 2024
-
[24]
Chain-of-thought prompting elicits reasoning in large language models,
J. Wei, X. Wang, D. Schuurmans, M. Bosma, F. Xia, E. Chi, Q. V . Le, D. Zhouet al., “Chain-of-thought prompting elicits reasoning in large language models,”Advances in neural information processing systems, vol. 35, pp. 24 824–24 837, 2022
work page 2022
-
[25]
Language models are few-shot learners,
T. Brown, B. Mann, N. Ryder, M. Subbiah, J. D. Kaplan, P. Dhariwal, A. Neelakantanet al., “Language models are few-shot learners,” inProc. Adv. Neural Inf. Process. Syst. (NeurIPS), vol. 33, 2020, pp. 1877–1901
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.