Behavior-Centric Extraction of Scenarios from Highway Traffic Data and their Domain-Knowledge-Guided Clustering using CVQ-VAE
Pith reviewed 2026-05-15 10:22 UTC · model grok-4.3
The pith
Highway traffic scenarios are extracted in a standardized behavior-centric way and clustered with a domain-knowledge-guided CVQ-VAE.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
This work contributes a standardized scenario extraction based on the Scenario-as-Specification concept together with a domain-knowledge-guided clustering process using CVQ-VAE. Experiments on the highD dataset show that scenarios can be extracted reliably and that domain knowledge can be effectively integrated into the clustering process, yielding a more standardized derivation of scenario categories from highway data recordings.
What carries the argument
The Scenario-as-Specification concept for behavior-centric extraction combined with CVQ-VAE for domain-knowledge-guided clustering of the resulting scenarios.
If this is right
- Scenarios extracted from different recordings become directly comparable because the extraction follows a single specification.
- Clustering respects domain knowledge, producing groups that remain meaningful to traffic engineers rather than opaque statistical partitions.
- The resulting categories supply a concrete basis for testing automated driving systems in representative real-world conditions.
- Validation of automated vehicles can proceed from a smaller, more organized set of scenario groups instead of raw ungrouped recordings.
Where Pith is reading between the lines
- The same extraction and clustering steps could be adapted to urban or rural data by extending the underlying specification with new behavior rules.
- Groups produced this way might serve as reusable test suites that reduce the total number of simulation runs needed for safety arguments.
- If the clusters align with expert judgment, they could also guide the selection of critical edge cases for regulatory approval.
Load-bearing premise
The Scenario-as-Specification concept produces a standardized extraction process that remains comparable across different datasets while the CVQ-VAE clustering preserves domain interpretability without hidden fitting artifacts.
What would settle it
Applying the same extraction pipeline to a second independent highway dataset such as NGSIM and obtaining scenario categories whose distributions or defining parameters differ markedly from those obtained on highD.
Figures


read the original abstract
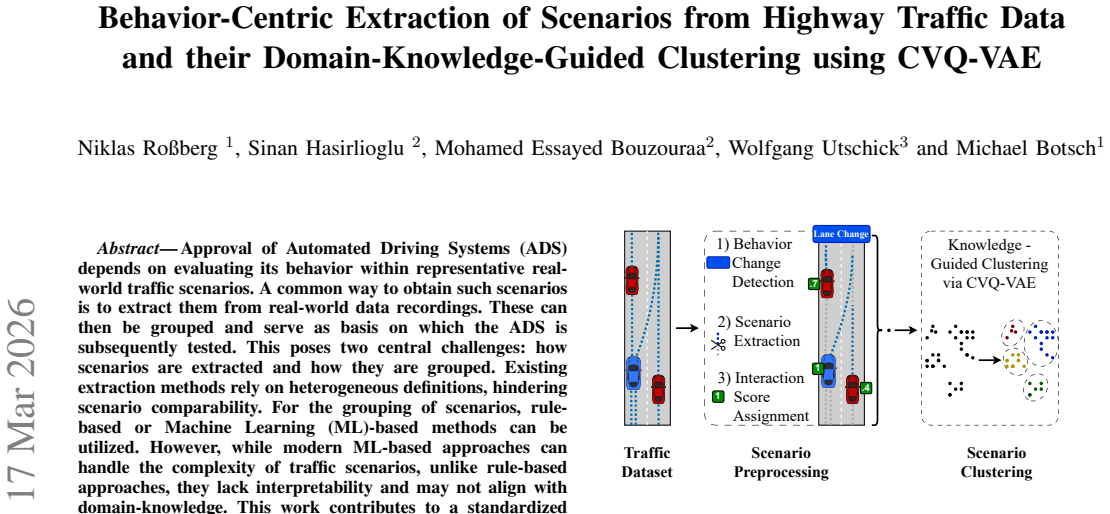
Approval of ADS depends on evaluating its behavior within representative real-world traffic scenarios. A common way to obtain such scenarios is to extract them from real-world data recordings. These can then be grouped and serve as basis on which the ADS is subsequently tested. This poses two central challenges: how scenarios are extracted and how they are grouped. Existing extraction methods rely on heterogeneous definitions, hindering scenario comparability. For the grouping of scenarios, rule-based or ML-based methods can be utilized. However, while modern ML-based approaches can handle the complexity of traffic scenarios, unlike rule-based approaches, they lack interpretability and may not align with domain-knowledge. This work contributes to a standardized scenario extraction based on the Scenario-as-Specification concept, as well as a domain-knowledge-guided scenario clustering process. Experiments on the highD dataset demonstrate that scenarios can be extracted reliably and that domain-knowledge can be effectively integrated into the clustering process. As a result, the proposed methodology supports a more standardized process for deriving scenario categories from highway data recordings and thus enables a more efficient validation process of automated vehicles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a behavior-centric scenario extraction process grounded in the Scenario-as-Specification concept to standardize extraction from highway traffic recordings, addressing heterogeneity in prior definitions. It introduces a CVQ-VAE clustering method that incorporates domain knowledge to group extracted scenarios while preserving interpretability. Experiments on the highD dataset are presented to show that scenarios can be extracted reliably and that domain knowledge can be effectively integrated into the clustering process, ultimately supporting more efficient validation of automated driving systems.
Significance. If the quantitative results and methodological details hold, the work would provide a concrete step toward standardized, domain-aligned scenario derivation for ADS testing. The combination of a specification-based extraction pipeline with an interpretable, knowledge-guided variational autoencoder addresses two persistent gaps: lack of comparability across extraction methods and the opacity of purely data-driven clustering. Reproducible application to a public dataset such as highD would strengthen the case for adoption in validation pipelines.
major comments (3)
- [§4] §4 (Method), Eq. (3)–(5): the CVQ-VAE loss formulation and the precise manner in which domain-knowledge constraints are injected into the latent space are not stated explicitly enough to allow independent reproduction or to rule out hidden fitting artifacts that could undermine the claimed interpretability.
- [§5] §5 (Experiments), Table 2 and Figure 4: the reported extraction reliability and clustering quality metrics lack error bars, statistical significance tests, and a clear baseline comparison against both rule-based and standard VAE clustering; without these, the claim that domain knowledge is “effectively integrated” cannot be evaluated.
- [§3.2] §3.2 (Scenario-as-Specification): the formal definition of the specification template and the exact mapping from raw trajectory data to specification parameters are only sketched; this leaves open whether the extraction process is truly dataset-agnostic or contains implicit tuning that reduces comparability across recordings.
minor comments (2)
- [§4] Notation for the CVQ-VAE components (codebook size, commitment loss weight, etc.) should be introduced once in §4 and used consistently thereafter.
- [§5.1] The highD dataset preprocessing steps (lane filtering, trajectory smoothing parameters) are mentioned only in passing; a short appendix table listing all preprocessing hyperparameters would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. These highlight important areas for improving clarity, reproducibility, and rigor. We address each major comment below and will incorporate revisions to strengthen the manuscript accordingly.
read point-by-point responses
-
Referee: [§4] §4 (Method), Eq. (3)–(5): the CVQ-VAE loss formulation and the precise manner in which domain-knowledge constraints are injected into the latent space are not stated explicitly enough to allow independent reproduction or to rule out hidden fitting artifacts that could undermine the claimed interpretability.
Authors: We agree that the current description of the CVQ-VAE loss in Equations (3)–(5) lacks sufficient explicit detail for full reproducibility. In the revised manuscript, we will expand Section 4 with a complete derivation of the loss terms, including the precise formulation of the domain-knowledge constraint penalties, their weighting hyperparameters, and the mechanism by which they are injected into the latent space (e.g., via modified prior or regularization terms). We will also add pseudocode and a step-by-step explanation to rule out potential fitting artifacts and better support the interpretability claims. revision: yes
-
Referee: [§5] §5 (Experiments), Table 2 and Figure 4: the reported extraction reliability and clustering quality metrics lack error bars, statistical significance tests, and a clear baseline comparison against both rule-based and standard VAE clustering; without these, the claim that domain knowledge is “effectively integrated” cannot be evaluated.
Authors: We acknowledge that the experimental results in Section 5 would benefit from greater statistical rigor. In the revision, we will augment Table 2 and Figure 4 with error bars (standard deviation across multiple runs or cross-validation folds), include statistical significance tests (e.g., paired t-tests or Wilcoxon signed-rank tests with p-values), and add explicit baseline comparisons against a pure rule-based clustering approach as well as a standard VAE without domain-knowledge guidance. These additions will provide stronger quantitative support for the effectiveness of domain-knowledge integration. revision: yes
-
Referee: [§3.2] §3.2 (Scenario-as-Specification): the formal definition of the specification template and the exact mapping from raw trajectory data to specification parameters are only sketched; this leaves open whether the extraction process is truly dataset-agnostic or contains implicit tuning that reduces comparability across recordings.
Authors: We agree that Section 3.2 would be strengthened by a more formal treatment. In the revised version, we will introduce a precise mathematical definition of the specification template (including its parameter space and constraints) and detail the exact mapping function from raw trajectory data to template parameters. We will also explicitly discuss the dataset-agnostic properties, any assumptions or preprocessing steps, and evidence that the process does not rely on implicit dataset-specific tuning, thereby supporting comparability across different recordings. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper describes a two-part contribution: a standardized Scenario-as-Specification extraction process and CVQ-VAE clustering that incorporates domain knowledge. No equations, loss functions, or fitted parameters are referenced that would reduce any reported result to a self-definition or input by construction. The central claims rest on experiments performed on the external highD dataset, which supplies independent validation outside the method itself. No self-citation chains, uniqueness theorems imported from prior author work, or ansatzes smuggled via citation are visible in the provided text. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Scenario-as-Specification provides a standardized, behavior-centric definition of traffic scenarios
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A standardized rule-based methodology for highway scenario extraction based on ego vehicle behavior changes... CVQ-VAE... interaction score matrix T derived from DG-SFM
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
CVQ-VAE Loss: L_cvq = reconstruction + VQ + commitment; knowledge-guided losses L_cl, L_int
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
N. Kalra and S. M. Paddock, “Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability?” Transportation Research Part A: Policy and Practice, 2016
work page 2016
-
[2]
J. Langner, H. Grolig, S. Otten, M. Holz ¨apfel, and E. Sax, “Logical scenario derivation by clustering dynamic-length-segments extracted from real-world-driving-data,” inProceedings of the 5th Interna- tional Conference on Vehicle Technology and Intelligent Transport Systems, (VEHITS), 2019
work page 2019
-
[3]
Fundamental considerations around scenario-based testing for automated driving,
C. Neurohr, L. Westhofen, T. Henning, T. de Graaff, E. M ¨ohlmann, and E. B ¨ode, “Fundamental considerations around scenario-based testing for automated driving,” inIEEE Intelligent Vehicles Sympo- sium (IV), 2020
work page 2020
-
[4]
Scenario as specification: Structuring the development and deployment of automated driving,
M. E. Bouzouraa and S. Hasirlioglu, “Scenario as specification: Structuring the development and deployment of automated driving,” inIEEE/ACM 1st International Workshop on Software Engineering for Autonomous Driving Systems (SE4ADS), 2025
work page 2025
-
[5]
R. Krajewski, J. Bock, L. Kloeker, and L. Eckstein, “The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems,” in IEEE International Conference on Intelligent Transportation Sys- tems (ITSC), 2018
work page 2018
-
[6]
N. Epple, T. Hankofer, and A. Riener, “Scenario classes in naturalis- tic driving: Autoencoder-based spatial and time-sequential clustering of surrounding object trajectories,” inIEEE 23rd International Con- ference on Intelligent Transportation Systems (ITSC), 2020
work page 2020
-
[7]
scenario.center: Methods from real-world data to a scenario database,
M. Schuldes, C. Glasmacher, and L. Eckstein, “scenario.center: Methods from real-world data to a scenario database,” in2024 IEEE Intelligent Vehicles Symposium (IV), 2024
work page 2024
-
[8]
Clustering of the scenario space for the assessment of automated driving,
J. Kerber, S. Wagner, K. Groh, D. Notz, T. K ¨uhbeck, D. Watzenig, and A. Knoll, “Clustering of the scenario space for the assessment of automated driving,” inIEEE Intelligent Vehicles Symposium (IV), 2020
work page 2020
-
[9]
Reliable trajectory prediction and uncertainty quantification with conditioned diffusion models,
M. Neumeier, S. Dorn, M. Botsch, and W. Utschick, “Reliable trajectory prediction and uncertainty quantification with conditioned diffusion models,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2024
work page 2024
-
[10]
L. Balasubramanian, J. Wurst, M. Botsch, and K. Deng, “Traffic scenario clustering by iterative optimisation of self-supervised net- works using a random forest activation pattern similarity,” inIEEE Intelligent Vehicles Symposium (IV), 2021
work page 2021
-
[11]
C. Zheng and A. Vedaldi, “Online clustered codebook,” inIEEE/CVF International Conference on Computer Vision (ICCV), 2023
work page 2023
-
[12]
R. Egolf, A. Fertig, and M. Botsch, “Conditioned trajectory gener- ation for realistic driving scenarios via a hybrid machine learning architecture,” in2025 IEEE Intelligent Transportation Systems Con- ference (ITSC), 2025
work page 2025
-
[13]
Interaction- aware prediction of occupancy regions based on a pomdp frame- work,
T. Elter, T. Dirndorfer, M. Botsch, and W. Utschick, “Interaction- aware prediction of occupancy regions based on a pomdp frame- work,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022
work page 2022
-
[14]
Validation of a pomdp framework for interaction-aware trajectory prediction in vehicle safety,
T. Elter, T. Dirndorfer, M. Botsch, and W. Utschick, “Validation of a pomdp framework for interaction-aware trajectory prediction in vehicle safety,” in2025 IEEE Intelligent Vehicles Symposium (IV), 2025
work page 2025
-
[15]
M. Baden, A. Abouelazm, C. Hubschneider, Y . Wu, D. Slieter, and J. M. Z ¨ollner, “Tpk: Trustworthy trajectory prediction integrating prior knowledge for interpretability and kinematic feasibility,” in IEEE Intelligent Vehicles Symposium (IV), 2025
work page 2025
-
[16]
Open-world learning for traffic scenarios categorisation,
L. Balasubramanian, J. Wurst, M. Botsch, and K. Deng, “Open-world learning for traffic scenarios categorisation,”IEEE Transactions on Intelligent Vehicles (IV), 2023
work page 2023
-
[17]
C. Chang, J. Zhang, J. Ge, Z. Zhang, J. Wei, L. Li, and F.-Y . Wang, “Vistascenario: Interaction scenario engineering for vehicles with intelligent systems for transport automation,”IEEE Transactions on Intelligent Vehicles (IV), 2024
work page 2024
-
[18]
Capturing the variety of urban logical scenarios from bird-view trajectories,
C. King, T. Braun, C. Braess, J. Langner, and E. Sax, “Capturing the variety of urban logical scenarios from bird-view trajectories,” in 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), 2021
work page 2021
-
[19]
Sce- nario extraction from a large real-world dataset for the assessment of automated vehicles,
D. Guo, M. M. S ´anchez, E. de Gelder, and T. P. van der Sande, “Sce- nario extraction from a large real-world dataset for the assessment of automated vehicles,” inIEEE International Conference on Intelligent Transportation Systems (ITSC), 2023
work page 2023
-
[20]
Real-world scenario mining for the assessment of automated vehicles,
E. d. Gelder, J. Manders, C. Grappiolo, J.-P. Paardekooper, O. O. d. Camp, and B. D. Schutter, “Real-world scenario mining for the assessment of automated vehicles,” inIEEE 23rd International Con- ference on Intelligent Transportation Systems (ITSC), 2020
work page 2020
-
[21]
Clas- sification of driving maneuvers in urban traffic for parametrization of test scenarios,
L. Hartjen, R. Philipp, F. Schuldt, F. Howar, and B. Friedrich, “Clas- sification of driving maneuvers in urban traffic for parametrization of test scenarios,” 2019
work page 2019
-
[22]
A survey on data-driven scenario generation for automated vehicle testing,
J. Cai, W. Deng, H. Guang, Y . Wang, J. Li, and J. Ding, “A survey on data-driven scenario generation for automated vehicle testing,” Machines, vol. 10, no. 11, p. 1101, 2022
work page 2022
-
[23]
Real- world maneuver extraction for autonomous vehicle validation: A comparative study,
A. Erdogan, B. Ugranli, E. Adali, A. Sentas, E. Mungan, E. Kaplan, and A. Leitner, “Real- world maneuver extraction for autonomous vehicle validation: A comparative study,” in2019 IEEE Intelligent Vehicles Symposium (IV), 2019
work page 2019
-
[24]
F. Montanari, H. Ren, and A. Djanatliev, “Scenario detection in unlabeled real driving data with a rule-based state machine supported by a recurrent neural network,” inIEEE 93rd Vehicular Technology Conference (VTC), 2021
work page 2021
-
[25]
Unsuper- vised driving event discovery based on vehicle can-data,
T. Kreutz, O. Esbel, M. M ¨uhlh¨auser, and A. S. Guinea, “Unsuper- vised driving event discovery based on vehicle can-data,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022
work page 2022
-
[26]
Unsupervised driving situation detection in latent space for autonomous cars,
E. Rodr ´ıguez-Hern´andez, J. I. Vasquez, C. A. Duchanoy Mart ´ınez, and H. Taud, “Unsupervised driving situation detection in latent space for autonomous cars,”Applied Sciences, vol. 12, no. 7, 2022
work page 2022
-
[27]
On the application of clustering for extracting driving scenarios from vehicle data,
N. Chetouane and F. Wotawa, “On the application of clustering for extracting driving scenarios from vehicle data,”Machine Learning with Applications (MLWA), 2022
work page 2022
-
[28]
Time series segmentation for driving scenario detection with fully convolutional networks,
P. Elspas, Y . Klose, S. Isele, J. Bach, and E. Sax, “Time series segmentation for driving scenario detection with fully convolutional networks,” inProceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), 2021
work page 2021
-
[29]
Driver maneuver detection and analysis using time series segmentation and classification,
A. Aboahet al., “Driver maneuver detection and analysis using time series segmentation and classification,”Journal of Transportation Engineering, Part A: Systems, 2023
work page 2023
-
[30]
Trajectory-based clustering of real-world urban driving sequences with multiple traffic objects,
L. Ries, P. Rigoll, T. Braun, T. Schulik, J. Daube, and E. Sax, “Trajectory-based clustering of real-world urban driving sequences with multiple traffic objects,” inIEEE International Intelligent Trans- portation Systems Conference (ITSC), 2021
work page 2021
-
[31]
F. Kruber, J. Wurst, E. S. Morales, S. Chakraborty, and M. Botsch, “Unsupervised and supervised learning with the random forest al- gorithm for traffic scenario clustering and classification,” inIEEE Intelligent Vehicles Symposium (IV), 2019
work page 2019
-
[32]
Large scale autonomous driving scenarios clustering with self-supervised feature extraction,
J. Zhao, J. Fang, Z. Ye, and L. Zhang, “Large scale autonomous driving scenarios clustering with self-supervised feature extraction,” inIEEE Intelligent Vehicles Symposium (IV), 2021
work page 2021
-
[33]
Expert- lasts: Expert-knowledge guided latent space for traffic scenarios,
J. Wurst, L. Balasubramanian, M. Botsch, and W. Utschick, “Expert- lasts: Expert-knowledge guided latent space for traffic scenarios,” in IEEE Intelligent Vehicles Symposium (IV), 2022
work page 2022
-
[34]
Clus- tering traffic scenarios using mental models as little as possible,
F. Hauer, I. Gerostathopoulos, T. Schmidt, and A. Pretschner, “Clus- tering traffic scenarios using mental models as little as possible,” in IEEE Intelligent Vehicles Symposium (IV), 2020
work page 2020
-
[35]
Traffic scene similarity: a graph-based contrastive learning approach,
M. Zipfl, M. Jarosch, and J. M. Z ¨ollner, “Traffic scene similarity: a graph-based contrastive learning approach,” inIEEE Symposium Series on Computational Intelligence (SSCI), 2023
work page 2023
-
[36]
Z. Zeng, S. Liu, Z. Bao, Q. Zhang, P. Wang, and Z. Hu, “An ef- fective and robust driving scenario identification framework utilizing unsupervised covariance clustering,” inIEEE Intelligent Vehicles Symposium (IV), 2025
work page 2025
-
[37]
Neural discrete representation learning,
A. van den Oord, O. Vinyals, and K. Kavukcuoglu, “Neural discrete representation learning,” inNeural Information Processing Systems (NIPS), 2017
work page 2017
-
[38]
N. Roßberg, M. Neumeier, S. Hasirlioglu, M. E. Bouzouraa, and M. Botsch, “Assessing the completeness of traffic scenario categories for automated highway driving functions via cluster-based analysis,” inIEEE Intelligent Vehicles Symposium (IV), 2025
work page 2025
-
[39]
Clustering and anomaly detection in embedding spaces for the validation of auto- motive sensors,
A. Fertig, L. Balasubramanian, and M. Botsch, “Clustering and anomaly detection in embedding spaces for the validation of auto- motive sensors,” in2024 IEEE Intelligent Vehicles Symposium (IV), 2024, pp. 1076–1083
work page 2024
-
[40]
Social force model for pedestrian dynam- ics,
D. Helbing and P. Molnar, “Social force model for pedestrian dynam- ics,”Physical review E, 1995
work page 1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.