A Multi-View 3D Telepresence System for XR Robot Teleoperation
Pith reviewed 2026-05-13 17:21 UTC · model grok-4.3
The pith
A hybrid multi-view point cloud and wrist RGB system outperforms RGB streams in XR robot teleoperation
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
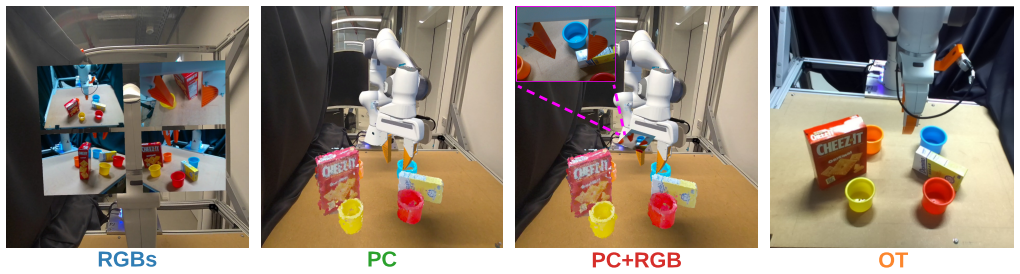
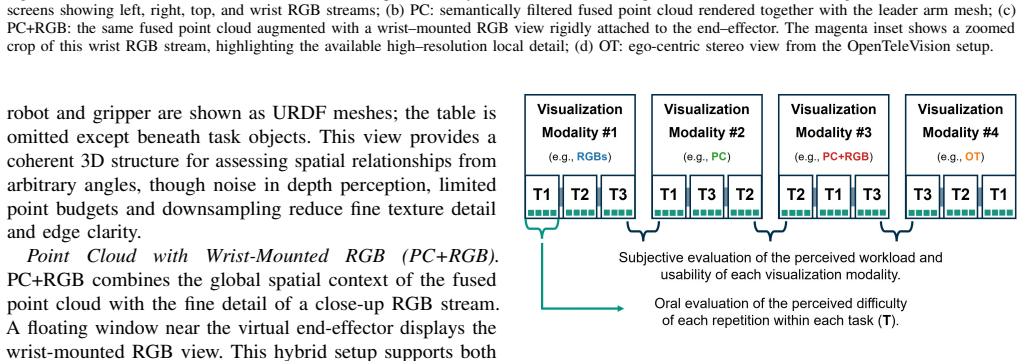
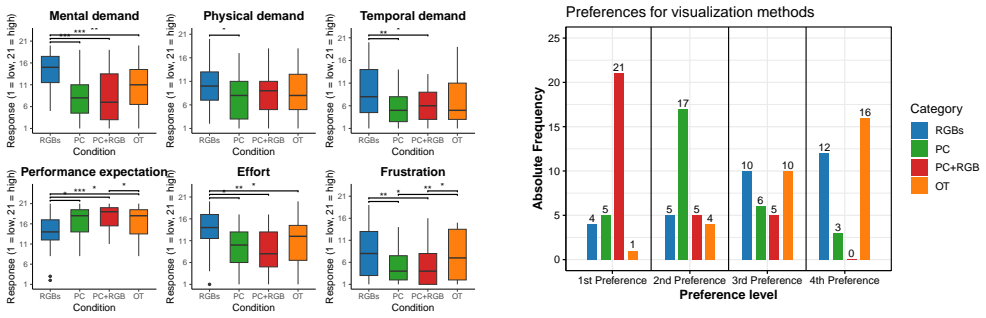
The system fuses geometry from three cameras to produce GPU-accelerated point-cloud rendering on standalone VR hardware while integrating a wrist-mounted RGB stream for high-resolution local detail. This combination supports real-time rendering of approximately 75k points and, in a within-subject study with 31 participants across three teleoperated manipulation tasks, achieved the best overall performance in task success, completion time, perceived workload, and usability, with the point cloud modality without RGB also outperforming the RGB streams and OpenTeleVision.
What carries the argument
The multi-view fusion pipeline that renders GPU-accelerated point clouds from three cameras on VR hardware and supplements them with wrist-mounted RGB for localized detail.
If this is right
- Real-time rendering of around 75,000 points is achievable on standalone VR devices such as the Meta Quest 3.
- Point cloud visualizations without additional RGB information already provide better performance than traditional RGB streams or stereo projections.
- Combining global 3D structure with localized high-resolution detail improves telepresence for manipulation tasks.
- This approach offers a strong foundation for developing next-generation robot teleoperation systems in applications like remote maintenance and search and rescue.
Where Pith is reading between the lines
- Operators in hazardous environments could achieve more precise control with reduced training time using such 3D interfaces.
- Data collected through this teleoperation method might improve robot learning algorithms by providing richer demonstration examples.
- Challenges like maintaining accurate calibration across cameras in varying conditions may limit deployment in unstructured settings.
- Integrating eye-tracking or haptic feedback could further enhance the system's intuitiveness.
Load-bearing premise
That the fused point clouds from three cameras will deliver reliable and accurate depth information on VR hardware without introducing noticeable latency or errors in typical manipulation settings.
What would settle it
Observing no significant improvement or even decreased performance in task success rates and increased workload when using the hybrid system compared to simpler RGB streams in a replication study with different tasks or hardware.
Figures






read the original abstract
Robot teleoperation is critical for applications such as remote maintenance, fleet robotics, search and rescue, and data collection for robot learning. Effective teleoperation requires intuitive 3D visualization with reliable depth cues, which conventional screen-based interfaces often fail to provide. We introduce a multi-view VR telepresence system that (1) fuses geometry from three cameras to produce GPU-accelerated point-cloud rendering on standalone VR hardware, and (2) integrates a wrist-mounted RGB stream to provide high-resolution local detail where point-cloud accuracy is limited. Our pipeline supports real-time rendering of approximately 75k points on the Meta Quest 3. A within-subject study was conducted with 31 participants to compare our system to other visualisation modalities, such as RGB streams, a projection of stereo-vision directly in the VR device and point clouds without providing additional RGB information. Across three different teleoperated manipulation tasks, we measured task success, completion time, perceived workload, and usability. Our system achieved the best overall performance, while the Point Cloud modality without RGB also outperforming the RGB streams and OpenTeleVision. These results show that combining global 3D structure with localized high-resolution detail substantially improves telepresence for manipulation and provides a strong foundation for next-generation robot teleoperation systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a multi-view VR telepresence system for XR robot teleoperation that fuses geometry from three cameras into GPU-accelerated point clouds (approximately 75k points) rendered on standalone hardware such as the Meta Quest 3, augmented by a wrist-mounted RGB stream for high-resolution local detail. It reports a within-subject user study with 31 participants comparing the system to RGB streams, stereo-vision projection (OpenTeleVision), and point clouds without RGB across three manipulation tasks, measuring task success, completion time, NASA-TLX workload, and SUS usability, with the claim that the proposed system achieved the best overall performance.
Significance. If the empirical claims hold after statistical validation, the work demonstrates a practical advance in providing reliable depth cues and detail for teleoperation on consumer VR devices, with potential applications in remote maintenance, search and rescue, and data collection for robot learning. The GPU-accelerated multi-view fusion pipeline is a concrete engineering contribution, but the current absence of statistical support limits the strength of the performance conclusions.
major comments (1)
- [Abstract and Results section] Abstract and Results section: The central claim that the proposed system 'achieved the best overall performance' while the 'Point Cloud modality without RGB also outperforming the RGB streams and OpenTeleVision' is unsupported by any reported statistical tests (ANOVA, Friedman, or equivalent), p-values, effect sizes, confidence intervals, or handling of order effects for the metrics of success rate, completion time, NASA-TLX, or SUS. With only 31 participants and multiple conditions in a within-subject design, the observed rankings cannot be taken as evidence of superiority without these details; this directly undermines the primary performance assertion.
minor comments (2)
- [Methods section] Methods section: Expand on camera calibration procedures, latency measurements for the three-camera fusion on standalone VR, task definitions, and error-handling protocols to allow replication and assessment of potential confounds.
- [Figures and tables] Figures and tables: Add error bars, statistical annotations, and clear labels distinguishing the four modalities (proposed system, point cloud only, RGB streams, OpenTeleVision) in all result visualizations.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the need for statistical support. We agree this is essential and will revise the manuscript to include the required analyses.
read point-by-point responses
-
Referee: [Abstract and Results section] Abstract and Results section: The central claim that the proposed system 'achieved the best overall performance' while the 'Point Cloud modality without RGB also outperforming the RGB streams and OpenTeleVision' is unsupported by any reported statistical tests (ANOVA, Friedman, or equivalent), p-values, effect sizes, confidence intervals, or handling of order effects for the metrics of success rate, completion time, NASA-TLX, or SUS. With only 31 participants and multiple conditions in a within-subject design, the observed rankings cannot be taken as evidence of superiority without these details; this directly undermines the primary performance assertion.
Authors: We agree that the performance claims require statistical backing. The current manuscript reports only descriptive rankings without inferential tests. In revision we will add repeated-measures ANOVA or Friedman tests (as appropriate for each metric), p-values, effect sizes, and 95% confidence intervals. We will also report the counterbalancing scheme used for condition order and any checks for order effects. These additions will appear in the Results section; the Abstract will be updated to reflect only statistically supported statements. revision: yes
Circularity Check
No circularity: empirical user study with no derivation chain
full rationale
The paper describes a multi-view VR telepresence pipeline and reports measured outcomes from a 31-participant within-subject study on three manipulation tasks. No equations, first-principles derivations, fitted parameters, or predictions appear in the abstract or described content. Performance claims rest directly on observed task success, completion time, NASA-TLX, and SUS scores rather than any reduction to self-defined inputs or self-citations. The work is therefore self-contained against external benchmarks with no load-bearing steps that collapse by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Three cameras provide sufficient overlapping geometry for accurate real-time point cloud fusion in typical manipulation scenes.
- domain assumption Standalone VR hardware can sustain real-time rendering of approximately 75k points with acceptable latency.
Reference graph
Works this paper leans on
-
[1]
Connecting human-robot interaction and data visualization,
D. Szafir and D. A. Szafir, “Connecting human-robot interaction and data visualization,” inProceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, ser. HRI ’21. New York, NY , USA: Association for Computing Machinery, 2021, p. 281–292. [Online]. Available: https://doi.org/10.1145/3434073.3444683
-
[2]
N. Walker, A. T. Stull, and A. Steinfeld, “The cyber-physical control room: A mixed reality interface for mobile robot teleoperation and human-robot teaming,” inACM/IEEE International Conference on Human–Robot Interaction (HRI), 2024. [Online]. Available: https://doi.org/10.1145/3610977.3634981
-
[3]
Teleoperation of humanoid robots: A survey,
K. Darvish, L. Penco, J. Ramos, R. Cisneros, J. Pratt, E. Yoshida, S. Ivaldi, and D. Pucci, “Teleoperation of humanoid robots: A survey,” IEEE Transactions on Robotics, vol. 39, no. 3, p. 1706–1727, Jun
-
[4]
Available: https://doi.org/10.1109/TRO.2023.3236952
[Online]. Available: https://doi.org/10.1109/TRO.2023.3236952
-
[5]
Baxter’s homunculus: Virtual reality spaces for teleoperation in manufacturing,
J. I. Lipton, A. J. Fay, and D. Rus, “Baxter’s homunculus: Virtual reality spaces for teleoperation in manufacturing,”IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 179–186, 2018. [Online]. Available: https://doi.org/10.1109/LRA.2017.2737046
-
[6]
Ros reality: A virtual reality framework using consumer-grade hardware for ros-enabled robots,
D. Whitney, E. Rosen, D. Ullman, E. Phillips, and S. Tellex, “Ros reality: A virtual reality framework using consumer-grade hardware for ros-enabled robots,” inProc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2018, pp. 1–9. [Online]. Available: https://doi.org/10.1109/IROS.2018.8593513
-
[7]
K. Li, R. Bacher, S. Schmidt, W. Leemans, and F. Steinicke, “Reality fusion: Robust real-time immersive mobile robot teleoperation with volumetric visual data fusion,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 8982–8989. [Online]. Available: https://doi.org/10.1109/IROS58592. 2024.10802431
-
[8]
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang, “Open-television: Teleoperation with immersive active visual feedback,” 2024. [Online]. Available: https://doi.org/10.48550/arXiv.2407.01512
-
[9]
Y . Luo, J. Wang, H.-N. Liang, S. Luo, and E. G. Lim, “Monoscopic vs. stereoscopic views and display types in the teleoperation of unmanned ground vehicles for object avoidance,” in2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), 2021, pp. 418–425. [Online]. Available: https://doi.org/10.1109/RO-MAN50785.2021.9515455
-
[10]
Iris: An immersive robot interaction system,
X. Jiang, Q. Yuan, E. U. Dincer, H. Zhou, G. Li, X. Li, X. Jia, T. Schnizer, N. Schreiber, W. Liao, J. Haag, K. Li, G. Neumann, and R. Lioutikov, “Iris: An immersive robot interaction system,” inProceedings of The 9th Conference on Robot Learning, vol. 305, 2025, pp. 2555–2582. [Online]. Available: https://proceedings.mlr.press/v305/jiang25c.html
work page 2025
-
[11]
Xrobotoolkit: A cross-platform framework for robot teleoperation,
Z. Zhao, L. Yu, K. Jing, and N. Yang, “Xrobotoolkit: A cross-platform framework for robot teleoperation,” 2025. [Online]. Available: https://doi.org/10.48550/arXiv.2508.00097
-
[12]
D. Ni, A. Song, X. Xu, H. Li, C. Zhu, and H. Zeng, “3d- point-cloud registration and real-world dynamic modelling-based virtual environment building method for teleoperation,”Robotica, vol. 35, no. 10, p. 1958–1974, 2017. [Online]. Available: https://doi.org/10.1017/S0263574716000631
-
[13]
D. Mazeas and B. Namoano, “Study of visualization modalities on industrial robot teleoperation for inspection in a virtual co-existence space,” inVirtual Worlds, vol. 4, no. 2, 2025. [Online]. Available: https://doi.org/10.3390/virtualworlds4020017
-
[14]
Open teach: A versatile teleoperation system for robotic manipulation,
A. Iyer, Z. Peng, Y . Dai, I. Guzey, S. Haldar, S. Chintala, and L. Pinto, “Open teach: A versatile teleoperation system for robotic manipulation,” 2024, arXiv:2403.07870. [Online]. Available: https://arxiv.org/abs/2403.07870
-
[15]
Arviz: An augmented reality-enabled visualization platform for ros applications,
K. C. Hoang, W. P. Chan, S. Lay, A. Cosgun, and E. A. Croft, “Arviz: An augmented reality-enabled visualization platform for ros applications,”IEEE Robotics & Automation Magazine, vol. 29, no. 1, pp. 58–67, 2022. [Online]. Available: https: //doi.org/10.1109/MRA.2021.3135760
-
[16]
iviz: A ros visualization app for mobile devices,
A. Zea and U. D. Hanebeck, “iviz: A ros visualization app for mobile devices,”Software Impacts, vol. 8, p. 100057, 2021. [Online]. Available: https://doi.org/10.1016/j.simpa.2021.100057
-
[17]
A practical roadmap to learning from demonstration for robotic manipulators in manufacturing,
A. Barekatain, H. Habibi, and H. V oos, “A practical roadmap to learning from demonstration for robotic manipulators in manufacturing,”Robotics, vol. 13, no. 7, p. 100, 2024. [Online]. Available: https://doi.org/10.3390/robotics13070100
-
[18]
M. Pascher, F. F. Goldau, K. Kronhardt, U. Frese, and J. Gerken, “Adaptix - a transitional xr framework for development and evaluation of shared control applications in assistive robotics,”Proceedings of the ACM on Human-Computer Interaction, vol. 8, no. EICS, pp. 1–28,
-
[19]
Available: https://doi.org/10.1145/3660243
[Online]. Available: https://doi.org/10.1145/3660243
-
[20]
Levr: A modular vr teleoperation framework for imitation learning in dexterous manipulation,
Z. K. Weng, M. L. Elwin, and H. Liu, “Levr: A modular vr teleoperation framework for imitation learning in dexterous manipulation,” 2025. [Online]. Available: https://doi.org/10.48550/arXiv.2509.14349
-
[21]
Openvr: Teleoperation for manipulation,
A. George, A. Bartsch, and A. Barati Farimani, “Openvr: Teleoperation for manipulation,”SoftwareX, vol. 29, p. 102054, 2025. [Online]. Available: https://doi.org/10.1016/j.softx.2025.102054
-
[22]
Real-time point cloud transmission for immersive teleoperation of autonomous mobile robots,
N. Barone, W. Brescia, G. Santangelo, A. P. Maggio, I. Cisternino, L. De Cicco, and S. Mascolo, “Real-time point cloud transmission for immersive teleoperation of autonomous mobile robots,” in Proceedings of the 16th ACM Multimedia Systems Conference, New York, NY , USA, 2025, p. 311–316. [Online]. Available: https://doi.org/10.1145/3712676.3719263
-
[23]
M. Wilder-Smith, V . Patil, and M. Hutter, “Radiance fields for robotic teleoperation,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 13 861–13 868. [Online]. Available: https://doi.org/10.1109/IROS58592.2024.10801345
-
[24]
LiDAR-PTQ: Post-training quantization for point cloud 3d object detection
D. Zingsheim, M. Plack, H. Dr ¨oge, J. Pfeifer, P. Stotko, M. B. Hullin, and R. Klein, “Riftcast: A template-free end-to-end multi-view live telepresence framework and benchmark,” inProceedings of the 33rd ACM International Conference on Multimedia. New York, NY , USA: Association for Computing Machinery, 2025, p. 9090–9099. [Online]. Available: https://d...
-
[25]
Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey,
M. Moniruzzaman, A. Rassau, D. Chai, and S. M. S. Islam, “Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey,”Robotics and Autonomous Systems, vol. 150, p. 103973, 2022. [Online]. Available: https: //doi.org/10.1016/j.robot.2021.103973
-
[26]
A systematic review of xr-enabled remote human-robot interaction systems,
X. Wang, L. Shen, and L.-H. Lee, “A systematic review of xr-enabled remote human-robot interaction systems,”ACM Computing Surveys, vol. 57, no. 11, pp. 1–37, Jun. 2025. [Online]. Available: https://doi.org/10.1145/3730574
-
[27]
M. Walker, T. Phung, T. Chakraborti, T. Williams, and D. Szafir, “Virtual, augmented, and mixed reality for human-robot interaction: A survey and virtual design element taxonomy,”ACM Transactions on Human-Robot Interaction, vol. 12, no. 4, Jul. 2023. [Online]. Available: https://doi.org/10.1145/3597623
-
[28]
V . Girb´es-Juan, V . Schettino, Y . Demiris, and J. Tornero, “Haptic and visual feedback assistance for dual-arm robot teleoperation in surface conditioning tasks,”IEEE Transactions on Haptics, vol. 14, no. 1, pp. 44–56, 2021. [Online]. Available: https: //doi.org/10.1109/TOH.2020.3004388
-
[29]
Y .-P. Su, X.-Q. Chen, C. Zhou, L. H. Pearson, C. G. Pretty, and J. G. Chase, “Integrating virtual, mixed, and augmented reality into remote robotic applications: A brief review of extended reality-enhanced robotic systems for intuitive telemanipulation and telemanufacturing tasks in hazardous conditions,”Applied Sciences, vol. 13, no. 22,
-
[30]
Available: https://doi.org/10.3390/app132212129
[Online]. Available: https://doi.org/10.3390/app132212129
-
[31]
Y . Su, X. Chen, T. Zhou, C. Pretty, and G. Chase, “Mixed reality- integrated 3d/2d vision mapping for intuitive teleoperation of mobile manipulator,”Robotics and Computer-Integrated Manufacturing, vol. 77, p. 102332, 2022. [Online]. Available: https://doi.org/10.1016/j. rcim.2022.102332
work page doi:10.1016/j 2022
-
[32]
A. R ´ev´esz, M. Michel, and R. Gilabert, “Measuring cognitive task demands using dual-task methodology, subjective self-ratings, and expert judgments,”Studies in Second Language Acquisition, vol. 38, no. 4, p. 703–737, 2016. [Online]. Available: https: //doi.org/10.1017/S0272263115000339
-
[33]
Development of NASA-TLX (Task Load Index): Resultsnum of empirical and theoretical research
S. G. Hart and L. E. Staveland, “Development of nasa-tlx (task load index): Results of empirical and theoretical research,” inHuman Mental Workload, ser. Advances in Psychology, P. A. Hancock and N. Meshkati, Eds. North-Holland, 1988, vol. 52, pp. 139–183. [Online]. Available: https://doi.org/10.1016/S0166-4115(08)62386-9
-
[34]
C. A. Thomas Franke and D. Wessel, “A personal resource for technology interaction: Development and validation of the affinity for technology interaction (ati) scale,”International Journal of Human–Computer Interaction, vol. 35, no. 6, pp. 456–467, 2019. [Online]. Available: https://doi.org/10.1080/10447318.2018.1456150
-
[35]
Measuring presence in virtual environments: A presence questionnaire,
B. G. Witmer and M. J. Singer, “Measuring presence in virtual environments: A presence questionnaire,”Presence, vol. 7, no. 3, pp. 225–240, 1998. [Online]. Available: https://doi.org/10.1162/ 105474698565686
work page 1998
-
[36]
Measuring presence in virtual environments,
R. Scheuchenpflug, “Measuring presence in virtual environments,” in HCI International, vol. 2001. HCI International, 2001, pp. 56–58
work page 2001
-
[37]
Development of a virtual reality system usability questionnaire (vrsuq),
Y . M. Kim and I. Rhiu, “Development of a virtual reality system usability questionnaire (vrsuq),”Applied Ergonomics, vol. 119, p. 104319, 2024. [Online]. Available: https://doi.org/10.1016/j.apergo. 2024.104319
-
[38]
R Core Team,R: A Language and Environment for Statistical Computing, R Foundation for Statistical Computing, Vienna, Austria,
- [39]
- [40]
-
[41]
A comprehensive user study on augmented reality-based data collection interfaces for robot learning,
X. Jiang, P. Mattes, X. Jia, N. Schreiber, G. Neumann, and R. Lioutikov, “A comprehensive user study on augmented reality-based data collection interfaces for robot learning,” inProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’24). New York, NY , USA: Association for Computing Machinery, 2024, pp. 333–342. [Online...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.