Outlier-Robust Nonlinear Moving Horizon Estimation using Adaptive Loss Functions
Pith reviewed 2026-05-10 19:02 UTC · model grok-4.3
The pith
An adaptive loss function lets moving horizon estimators automatically downweight outliers while reverting to standard least-squares on clean data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors propose an adaptive robust loss function framework for MHE that integrates the loss with a regularization term to avoid naive solutions. The approach prioritizes the fitting of uncontaminated data and downweights contaminated ones. A tuning parameter is included to control the shape of the loss function and adjust the estimator's robustness to outliers. Simulation results show that adaptation occurs in just a few iterations, whereas the traditional L2 behavior predominates when the measurements are free of outliers.
What carries the argument
Adaptive robust loss function paired with a regularization term, governed by one tuning parameter that shapes the loss to balance outlier downweighting against standard fitting.
If this is right
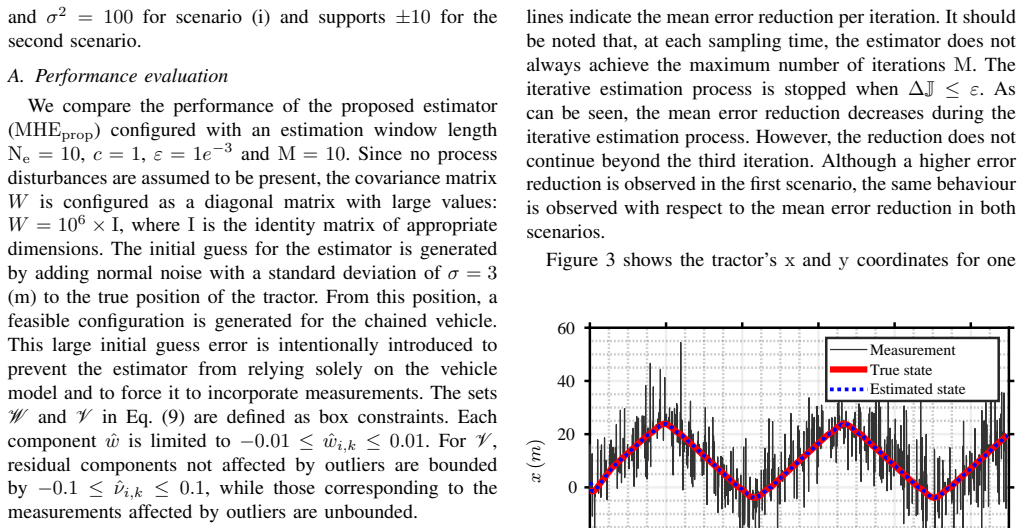
- Adaptation to the presence of outliers occurs within only a few iterations.
- The estimator recovers traditional L2 behavior on measurements without outliers.
- The regularization term prevents collapse to solutions that discard all measurements.
- Contaminated measurements receive lower weight than uncontaminated ones during fitting.
Where Pith is reading between the lines
- The single tuning parameter might be adjusted online if an auxiliary outlier-rate detector were added.
- The framework could be tested on real sensor streams from mobile robots to see whether quick adaptation holds outside simulations.
- Similar adaptive losses might be substituted into other receding-horizon or filtering schemes that currently rely on fixed robust costs.
Load-bearing premise
The added regularization term reliably blocks naive solutions that ignore measurements, and one tuning parameter can deliver the needed robustness without destabilizing the estimator.
What would settle it
Run the estimator on a dataset with a known high fraction of outliers and check whether estimates remain bounded and accurate or diverge, and separately verify on clean data whether the loss reverts exactly to squared-error behavior.
Figures
read the original abstract
In this work, we propose an adaptive robust loss function framework for MHE, integrating an adaptive robust loss function to reduce the impact of outliers with a regularization term that avoids naive solutions. The proposed approach prioritizes the fitting of uncontaminated data and downweights the contaminated ones. A tuning parameter is incorporated into the framework to control the shape of the loss function for adjusting the estimator's robustness to outliers. The simulation results demonstrate that adaptation occurs in just a few iterations, whereas the traditional behaviour $\mathrm{L_2}$ predominates when the measurements are free of outliers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an adaptive robust loss function framework for nonlinear moving horizon estimation (MHE). It combines an adaptive loss to down-weight outliers, a regularization term to avoid naive solutions, and a single tuning parameter to control the loss shape and robustness level. Simulations are presented to show that the estimator adapts in a few iterations when outliers are present and recovers standard L2 behavior on clean measurements.
Significance. If the central claims hold, the approach could provide a tunable, practical tool for outlier handling in robotic MHE applications where sensor data is frequently corrupted. The reported quick adaptation in simulations is a concrete empirical strength. However, the absence of theoretical convergence guarantees, error bounds, or comparisons to established robust MHE baselines (e.g., Huber or redescending losses) substantially limits the result's significance beyond the specific simulated cases.
major comments (3)
- Abstract: the central claim that the adaptive loss plus regularization reliably down-weights outliers while recovering L2 behavior and avoiding naive solutions lacks any derivation, stability bound, or analysis showing that the single tuning parameter prevents vanishing gradients or multiple local minima in the non-convex MHE program for general nonlinear dynamics.
- Simulation results: the reported outcomes are consistent with the stated behavior, yet no comparisons are provided against standard robust MHE formulations, making it impossible to quantify improvement or confirm that the adaptation is not an artifact of the chosen simulation setup.
- Framework: the regularization term is asserted to prevent naive solutions, but no explicit condition or bound is derived to guarantee this for arbitrary system nonlinearities, which is load-bearing for the claim that the method remains stable and unbiased.
minor comments (1)
- Abstract: the notation 'traditional behaviour L2' should be defined explicitly (e.g., as the quadratic loss) to avoid ambiguity for readers unfamiliar with the specific MHE formulation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the recommendation for major revision. We address each major comment point by point below, indicating planned changes to the manuscript where appropriate. Our responses focus on clarifying the scope of the current work and strengthening the presentation without overstating its contributions.
read point-by-point responses
-
Referee: Abstract: the central claim that the adaptive loss plus regularization reliably down-weights outliers while recovering L2 behavior and avoiding naive solutions lacks any derivation, stability bound, or analysis showing that the single tuning parameter prevents vanishing gradients or multiple local minima in the non-convex MHE program for general nonlinear dynamics.
Authors: We agree that the abstract and introduction present the framework's behavior in terms that could be interpreted as implying general guarantees. The manuscript is an empirical study demonstrating the observed adaptation and L2 recovery in simulations; no derivations, stability bounds, or analysis of the non-convex program for arbitrary nonlinear dynamics are provided. In the revised version we will rewrite the abstract and relevant sections to state explicitly that the claims are supported only by the reported simulation results, and we will add a limitations paragraph noting the absence of theoretical analysis as an area for future work. revision: yes
-
Referee: Simulation results: the reported outcomes are consistent with the stated behavior, yet no comparisons are provided against standard robust MHE formulations, making it impossible to quantify improvement or confirm that the adaptation is not an artifact of the chosen simulation setup.
Authors: We acknowledge the lack of baseline comparisons. The current simulations illustrate the adaptation property and L2 recovery but do not benchmark against established robust estimators. In the revision we will add new simulation cases that directly compare the proposed adaptive loss against Huber loss and redescending loss formulations within the same MHE framework, using the same system models and outlier scenarios, to provide quantitative performance differences. revision: yes
-
Referee: Framework: the regularization term is asserted to prevent naive solutions, but no explicit condition or bound is derived to guarantee this for arbitrary system nonlinearities, which is load-bearing for the claim that the method remains stable and unbiased.
Authors: The regularization term is motivated by the structure of the MHE objective to discourage complete rejection of all measurements. We agree that no general condition or bound is derived that would guarantee this property for arbitrary nonlinear dynamics. In the revised manuscript we will expand the framework section with a clearer derivation of the regularization's effect on the cost for the considered classes of systems and will explicitly state that a general guarantee for all nonlinearities is not provided and remains an open question. revision: partial
- Theoretical convergence guarantees, stability bounds, or analysis showing that the single tuning parameter prevents vanishing gradients or multiple local minima for general nonlinear dynamics.
Circularity Check
No significant circularity; new adaptive loss framework with explicit tuning parameter
full rationale
The paper introduces an adaptive robust loss function for nonlinear MHE as a new construction, controlled by a single tuning parameter that shapes the loss to down-weight outliers while recovering L2 behavior on clean data. Simulation results are reported as empirical outcomes showing rapid adaptation, not as predictions or derivations that reduce by the paper's own equations to values fitted from the same data. No load-bearing steps rely on self-citations, self-definitional loops, or renaming of known results. The framework and regularization term are presented as independent design choices whose performance is validated externally via simulation, keeping the derivation self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- tuning parameter
axioms (1)
- domain assumption Nonlinear system dynamics and measurement models are known and can be used inside the moving-horizon optimization
invented entities (1)
-
adaptive robust loss function with regularization term
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel / J_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
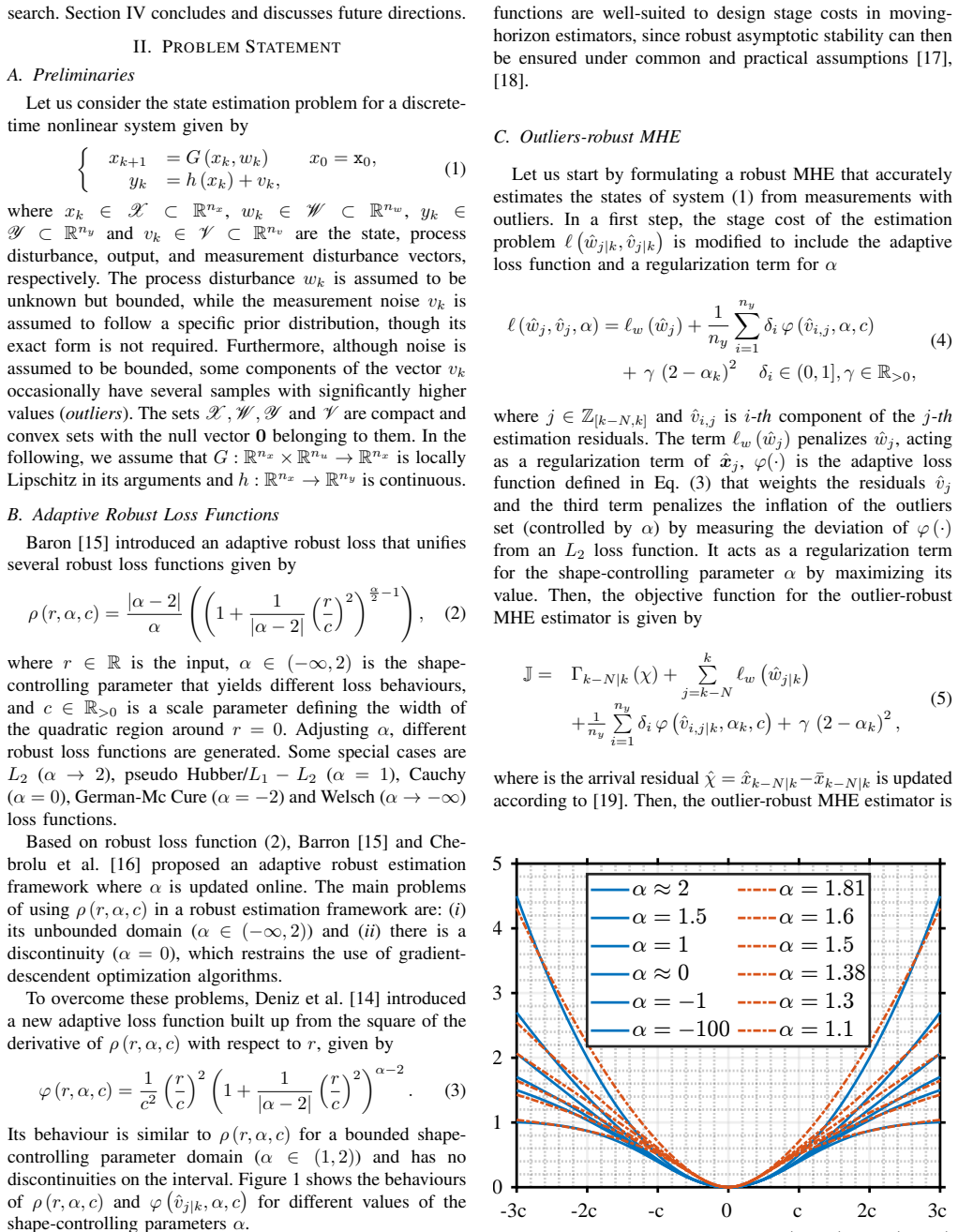
φ(r, α, c) = (1/c²)(r/c)² (1 + 1/|α-2|(r/c)²)^{α-2} ... α∈(1,2) ... regularization γ(2-α_k)² ... iterative dual estimation (9)-(10)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
robust asymptotic stability ... under detectability, continuity of stage cost, bounded arrival/stage costs
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A. Rahimnejad, L. Vanfretti, S. A. Gadsden, and M. Alshabi, “Strengthening lattice kalman filters: Introducing strong tracking lattice filtering for enhanced robustness,” IEEE Access, vol. 12, p. 178552 – 178565, 2024. [Online]. Available: https://www.scopus.com/inward/record.uri? eid=2-s2.0-85210287688&doi=10.1109%2fACCESS.2024.3504338& partnerID=40&md5=...
-
[2]
G. Gao, Y . Yi, Y . Zhong, S. Liang, G. Hu, and B. Gao, “A robust kalman filter based on kernel density estimation for system state estimation against measurement outliers,”IEEE Transactions on Instrumentation and Measurement, vol. 74, 2025, cited by:
work page 2025
-
[3]
[Online]. Available: https://www.scopus.com/inward/record.uri? eid=2-s2.0-105001064915&doi=10.1109%2fTIM.2025.3544710& partnerID=40&md5=f5ed8b7ad2812f52c841ed3d47c976e3
-
[4]
Geometric extended kalman filter with dual robust kernels for integrated navigation,
J. Bao, X. Yu, X. Mu, C. Hu, and H. Qin, “Geometric extended kalman filter with dual robust kernels for integrated navigation,” IEEE Transactions on Instrumentation and Measurement, 2025, cited by: 0. [Online]. Available: https://www.scopus.com/inward/record. uri?eid=2-s2.0-105010114912&doi=10.1109%2fTIM.2025.3585210& partnerID=40&md5=4c0ab518e3cd508d52e5...
-
[5]
Robust state estimation for legged robots with dual beta kalman filter,
T. Zhang, W. Cao, C. Liu, T. Zhang, J. Li, and S. E. Li, “Robust state estimation for legged robots with dual beta kalman filter,”IEEE Robotics and Automation Letters, vol. 10, no. 8, p. 7955 – 7962, 2025, cited by: 0. [Online]. Available: https://www.scopus.com/inward/ record.uri?eid=2-s2.0-105008276008&doi=10.1109%2fLRA.2025. 3579619&partnerID=40&md5=89...
work page 2025
-
[6]
A. Biswal and D.-J. Jwo, “Nonlinear regressive maximum correntropy extended kalman filter with student’s t-kernel for gps navigation,”IEEE Access, 2025, cited by: 0. [Online]. Available: https://www.scopus.com/inward/record.uri?eid= 2-s2.0-105010441511&doi=10.1109%2fACCESS.2025.3587939& partnerID=40&md5=416e87ddad0ed4caf93d7a35707c278d
-
[7]
Outlier-robust extended kalman filter for state-of-charge estimation of lithium-ion batteries,
W. H. Lee and K.-K. K. Kim, “Outlier-robust extended kalman filter for state-of-charge estimation of lithium-ion batteries,” IEEE Access, vol. 11, p. 132766 – 132779, 2023, cited by:
work page 2023
-
[8]
[Online]. Available: https://www.scopus.com/inward/record.uri? eid=2-s2.0-85178039086&doi=10.1109%2fACCESS.2023.3336274& partnerID=40&md5=ab03ca5ec1c61bc75ff87cae10c7ef63
-
[9]
K. Si, P. Li, Z.-P. Yuan, K. Qiao, B. Wang, and X. He, “Distributionally robust kalman filtering for ins/gps tightly coupled integration with model uncertainty and measurement outlier,”IEEE Transactions on Instrumentation and Measurement, vol. 72, 2023, cited by: 9. [Online]. Available: https://www.scopus.com/inward/record. uri?eid=2-s2.0-85164725083&doi=...
-
[10]
Critical evaluation of extended kalman filtering and moving-horizon estimation,
E. L. Haseltine and J. B. Rawlings, “Critical evaluation of extended kalman filtering and moving-horizon estimation,”Industrial & Engineering Chemistry Research, vol. 44, no. 8, pp. 2451–2460, Apr
-
[11]
Industrial & Engineering Chemistry Research 44(8), 2451–2460 (2005)
[Online]. Available: https://doi.org/10.1021/ie034308l
-
[12]
N. Deniz, F. Jorquera, and F. A. Cheein, “Absolute joint-angle es- timation of generalised n-trailer vehicles equipped with incremental encoders using moving horizon estimation,”ISA Transactions, vol. 143, p. 678 – 691, 2023, cited by: 3
work page 2023
-
[13]
A. Alessandri and M. Awawdeh, “Moving-horizon estimation with guaranteed robustness for discrete-time linear systems and measure- ments subject to outliers,”Automatica, vol. 67, pp. 85–93, 2016, cited By 77
work page 2016
-
[14]
Outlier robust state estimation through smoothing on a sliding window,
D. D. Palma and G. Indiveri, “Outlier robust state estimation through smoothing on a sliding window,”IF AC-PapersOnLine, vol. 53, no. 2, pp. 14 636–14 641, 2020, 21st IFAC World Congress
work page 2020
-
[15]
E. Aghapour and J. A. Farrell, “Outlier accommodation in moving-horizon state estimation: A risk-averse performance-specified approach,”International Journal of Adaptive Control and Signal Processing, vol. 34, no. 6, pp. 777–795, 2020. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/acs.3055
-
[16]
W. Cao, C. Liu, Z. Lan, Y . Piao, and S. E. Li, “Generalized moving horizon estimation for nonlinear systems with robustness to measure- ment outliers,” in2023 American Control Conference (ACC), 2023, pp. 1614–1621
work page 2023
-
[17]
N. N. Deniz, G. M. Sanchez, F. A. A. Cheein, and L. L. Giovanini, “Robust moving horizon estimation for autonomous agricultural vehi- cles with gnss outliers using a robust loss function,”IEEE Robotics and Automation Letters, vol. 10, no. 10, pp. 10 815–10 821, 2025
work page 2025
-
[18]
A general and adaptive robust loss function,
J. T. Barron, “A general and adaptive robust loss function,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2019
work page 2019
-
[19]
Adaptive robust kernels for non-linear least squares problems,
N. Chebrolu, T. L ¨abe, O. Vysotska, J. Behley, and C. Stachniss, “Adaptive robust kernels for non-linear least squares problems,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2240–2247, 2021
work page 2021
-
[20]
N. Deniz, M. Murillo, G. Sanchez, and L. Giovanini, “Robust stability of moving horizon estimation for non-linear systems with bounded disturbances using adaptive arrival cost,”IET Control Theory & Applications, vol. 14, no. 18, pp. 2879–2888, 2020
work page 2020
-
[21]
N. Deniz, G. Sanchez, M. Murillo, and L. Giovanini, “Simultaneous moving horizon estimation and control for nonlinear systems subject to bounded disturbances,”International Journal of Robust and Nonlinear Control, vol. 33, no. 13, pp. 7811–7830, 2023. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/rnc.6799
-
[22]
Adaptive arrival cost update for improving moving horizon estimation performance,
G. S ´anchez, M. Murillo, and L. Giovanini, “Adaptive arrival cost update for improving moving horizon estimation performance,”ISA transactions, vol. 68, pp. 54–62, 2017
work page 2017
-
[23]
Robust statistics: the approach based on influence functions. hoboken,
H. F. R. EM, P. Rousseeuw, and W. Stahel, “Robust statistics: the approach based on influence functions. hoboken,”NJ, Wiley, vol. 502, p. D0I, 2011
work page 2011
-
[24]
Moving horizon estimation for non- linear systems with time-varying parameters,
J. D. Schiller and M. A. M ¨uller, “Moving horizon estimation for non- linear systems with time-varying parameters,”IF AC-PapersOnLine, vol. 58, no. 18, pp. 341–348, 2024
work page 2024
-
[25]
K. Baumg ¨artner, R. Reiter, and M. Diehl, “Moving horizon estimation with adaptive regularization for ill-posed state and parameter esti- mation problems,” in2022 IEEE 61st Conference on Decision and Control (CDC). IEEE, 2022, pp. 2165–2171
work page 2022
-
[26]
Nonconvex minimization problems,
I. Ekeland, “Nonconvex minimization problems,”Bulletin of the Amer- ican Mathematical Society, vol. 1, no. 3, pp. 443–474, 1979
work page 1979
-
[27]
N. Deniz, F. Jorquera, M. Torres-Torriti, and F. A. Cheein, “Model predictive path-following controller for generalised n-trailer vehicles with noisy sensors and disturbances,”Control Engineering Practice, vol. 142, p. 105747, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.