i-Tac: Inverse Design of 3D-Printed Tactile Elastomers with Scalable and Tunable Optical and Mechanical Properties
Pith reviewed 2026-05-10 15:47 UTC · model grok-4.3
The pith
i-Tac inverse design finds printable resin mixtures that deliver user-specified transparency and hardness in a single fabrication step.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
i-Tac employs a mixture design methodology with three complementary resins to generate response surface models that map composition to transparency and hardness, thereby defining a scalable property space; a desirability-function-based multi-objective optimisation then identifies feasible composition regions and an optimal operating window, so that elastomers matching user-defined targets can be manufactured in a single iteration.
What carries the argument
Response surface models fitted to mixture-design experiments, combined with desirability-function multi-objective optimisation that inverts the conventional forward trial-and-error loop to output printable compositions directly from target properties.
If this is right
- Elastomers can be produced with any combination of transparency and hardness inside the modelled space without iterative material adjustments.
- Monolithic multi-material prints become feasible for both commercial and custom vision-based tactile sensor geometries.
- The characterised property space expands continuously with the three-resin mixture range rather than being limited to discrete commercial grades.
- Design time for new sensor architectures drops because the optimisation replaces repeated fabrication and measurement cycles.
Where Pith is reading between the lines
- Adding further measured responses such as friction or tear strength to the same models would let the optimisation target complete sensor performance specifications at once.
- Linking the optimisation output to finite-element simulations of contact deformation could create an end-to-end loop from application requirements to print-ready files.
- The same mixture-design-plus-optimisation structure could be applied to other resin systems or additive processes where composition controls functional behaviour.
Load-bearing premise
The fitted response surface models accurately predict optical and mechanical properties for any untested composition inside the characterised region, and printing or curing steps introduce no large unmodeled deviations.
What would settle it
Print an elastomer at the composition returned by the optimisation for a chosen transparency and hardness target, then measure those two properties and find that the results lie outside the tolerance band around the targets.
Figures















read the original abstract
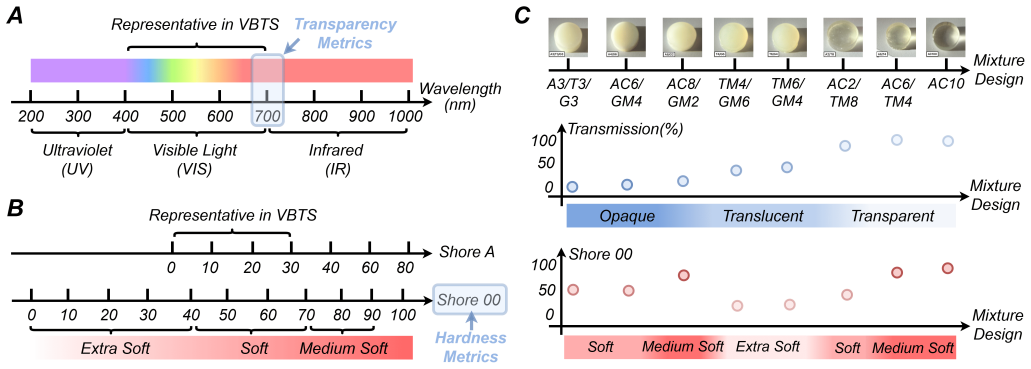
Elastomers are central to vision-based tactile sensors (VBTSs), where they transduce external contact into observable deformation. Different VBTS architectures, however, require distinct optical and mechanical properties, particularly transparency and hardness. Conventional elastomer design relies on a forward, trial-and-error optimisation process from material preparation to property evaluation, which is inefficient and offers limited property scalability and target tunability. In this work, we present i-Tac, an inverse design pipeline for tailoring 3D-printed tactile elastomers with target optical and mechanical properties. Inspired by the composite structure of the human dermis, i-Tac exploits multi-material PolyJet additive manufacturing with three complementary resins. A mixture design methodology is employed to characterise the printed elastomers and establish response surface models (ReSMs) that map material compositions to functional properties, thereby defining a scalable property space. Based on user-defined targets, a desirability-function-based multi-objective optimisation is then performed to identify feasible composition regions and derive an optimal operating window for fabrication. This enables elastomers with desired properties to be manufactured in a single iteration, thereby achieving efficient target tunability. Experimental results validate the proposed i-Tac framework in terms of both property scalability and inverse design performance, showing that i-Tac can effectively tailor elastomer transparency and hardness while reducing the iterative burden of conventional forward design. By fabricating physical sensor samples from both commercial and custom designs, the proposed framework further demonstrates the potential of inverse-designed, monolithically manufactured elastomers for customisable VBTS fabrication.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces i-Tac, an inverse-design pipeline for 3D-printed tactile elastomers that combines mixture-design experiments with response surface models (ReSMs) to map resin compositions to optical transmittance and hardness, followed by desirability-function multi-objective optimization to identify composition windows that meet user-specified targets. The central claim is that this enables fabrication of elastomers with desired properties in a single iteration, validated experimentally for both property scalability and inverse-design performance in vision-based tactile sensor applications.
Significance. If the ReSMs are shown to predict properties accurately at the optimized (untested) compositions, the work would provide a practical, scalable route to custom elastomers that reduces the trial-and-error burden of conventional forward design for VBTSs. The use of PolyJet multi-material printing to realize the optimized mixtures is a concrete strength, and the overall framing of inverse design for tunable optical-mechanical properties is timely for tactile sensing.
major comments (2)
- [Abstract] Abstract: The statement that 'experimental results validate... inverse design performance' is not supported by any reported quantitative metrics (e.g., R², RMSE, or leave-one-out error) for the ReSMs, the number of mixture compositions tested, or direct measured-versus-predicted comparisons on the final optimized samples. Without these, the single-iteration claim rests on unshown validation details.
- [Methods / Results] The pipeline fits ReSMs to a finite set of printed mixtures and then optimizes inside the feasible region; however, no cross-validation, hold-out set, or extrapolation-error analysis is described, so it remains possible that the reported performance reflects in-sample fit rather than reliable prediction at the desirability-optimized points.
minor comments (2)
- Notation for the desirability functions and the feasible-region constraints could be clarified with an explicit equation or pseudocode block.
- Figure captions should explicitly state the number of replicate prints and the measurement protocol for transmittance and hardness to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and recommendation for major revision. We address each major comment below and will update the manuscript to strengthen the quantitative validation of the ReSMs and inverse-design claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The statement that 'experimental results validate... inverse design performance' is not supported by any reported quantitative metrics (e.g., R², RMSE, or leave-one-out error) for the ReSMs, the number of mixture compositions tested, or direct measured-versus-predicted comparisons on the final optimized samples. Without these, the single-iteration claim rests on unshown validation details.
Authors: We agree that the abstract would be strengthened by explicit quantitative support. The original manuscript reports experimental validation of the i-Tac pipeline but does not highlight R², RMSE, leave-one-out error, the exact number of tested mixtures, or direct measured-versus-predicted values for the optimized samples. We will revise the abstract to include these metrics and add a results table or figure showing measured-versus-predicted comparisons on the final optimized compositions to better substantiate the single-iteration performance. revision: yes
-
Referee: [Methods / Results] The pipeline fits ReSMs to a finite set of printed mixtures and then optimizes inside the feasible region; however, no cross-validation, hold-out set, or extrapolation-error analysis is described, so it remains possible that the reported performance reflects in-sample fit rather than reliable prediction at the desirability-optimized points.
Authors: We thank the referee for this observation. While the mixture-design experiments provide a structured sampling of the composition space, the original submission does not describe cross-validation, hold-out testing, or explicit extrapolation-error analysis at the optimized points. We will add leave-one-out cross-validation results for the ReSMs and a targeted prediction-error analysis at the multi-objective optimized compositions in the revised Methods and Results sections to demonstrate that the reported performance reflects reliable prediction rather than in-sample fit alone. revision: yes
Circularity Check
No circularity: standard empirical modeling and experimental validation
full rationale
The derivation proceeds by printing a finite set of mixture compositions, fitting response surface models to the resulting measured optical and mechanical properties, then applying desirability-based multi-objective optimization over the model to select new compositions. The single-iteration claim is then tested by actually printing and measuring those optimized compositions. This sequence contains no self-definitional reduction, no renaming of fitted values as independent predictions, and no load-bearing self-citation; the final performance numbers rest on fresh experimental data outside the original design points.
Axiom & Free-Parameter Ledger
free parameters (1)
- Response surface model coefficients
axioms (2)
- domain assumption Elastomer optical and mechanical properties vary smoothly and continuously with resin composition ratios.
- domain assumption The desirability function correctly encodes the relative importance and acceptable ranges of transparency and hardness for the target application.
Reference graph
Works this paper leans on
-
[1]
Hardware technology of vision-based tactile sensor: A review,
S. Zhang, Z. Chen, Y . Gao, W. Wan, J. Shan, H. Xue, F. Sun, Y . Yang, and B. Fang, “Hardware technology of vision-based tactile sensor: A review,”IEEE Sensors Journal, vol. 22, no. 22, pp. 21 410–21 427, 2022
work page 2022
-
[2]
Vitactip: Design and verification of a novel biomimetic physical vision-tactile fusion sensor,
W. Fan, H. Li, W. Si, S. Luo, N. Lepora, and D. Zhang, “Vitactip: Design and verification of a novel biomimetic physical vision-tactile fusion sensor,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 1056–1062
work page 2024
-
[3]
Crystaltac: Vision-based tactile sensor family fabricated via rapid monolithic manufacturing,
W. Fan, H. Li, and D. Zhang, “Crystaltac: Vision-based tactile sensor family fabricated via rapid monolithic manufacturing,”Cyborg and Bionic Systems, vol. 6, p. 0231, 2025
work page 2025
-
[4]
C. Lin, H. Zhang, J. Xu, L. Wu, and H. Xu, “9dtact: A compact vision-based tactile sensor for accurate 3d shape reconstruction and generalizable 6d force estimation,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 923–930, 2023
work page 2023
-
[5]
Taceva: A performance evaluation framework for vision-based tactile sensors,
Q. Cong, S. Oh, W. Fan, S. Luo, K. Althoefer, and D. Zhang, “Taceva: A performance evaluation framework for vision-based tactile sensors,” Advanced Intelligent Systems, p. e202501179, 2025
work page 2025
-
[6]
S. Zhang, Y . Sun, J. Shan, Z. Chen, F. Sun, Y . Yang, and B. Fang, “Tirgel: A visuo-tactile sensor with total internal reflection mechanism for external observation and contact detection,”IEEE Robotics and Automation Letters, vol. 8, no. 10, pp. 6307–6314, 2023
work page 2023
-
[7]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
work page 2017
-
[8]
D. Zhang, W. Fan, J. Lin, H. Li, Q. Cong, W. Liu, N. F. Lepora, and S. Luo, “Design and benchmarking of a multimodality sensor for robotic manipulation with gan-based cross-modality interpretation,” IEEE Transactions on Robotics, vol. 41, pp. 1278–1295, 2025
work page 2025
-
[9]
Geltip: A finger-shaped optical tactile sensor for robotic manipulation,
D. F. Gomes, Z. Lin, and S. Luo, “Geltip: A finger-shaped optical tactile sensor for robotic manipulation,” in2020 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2020, pp. 9903–9909
work page 2020
-
[10]
Using fiber optic bundles to miniaturize vision-based tactile sensors,
J. Di, Z. Dugonjic, W. Fu, T. Wu, R. Mercado, K. Sawyer, V . R. Most, G. Kammerer, S. Speidel, R. E. Fanet al., “Using fiber optic bundles to miniaturize vision-based tactile sensors,”IEEE Transactions on Robotics, vol. 41, pp. 62–81, 2024
work page 2024
-
[11]
A. Solayman, M. Halwani, I. M. Zaid, R. B. Ambade, R. Chang, A. Ayyad, F. AlMaskari, Y . Zweiri, and Y . Abdul Samad, “Mechanical behaviour, contact pose estimation, and finite element analysis of vision based tactile sensors fabricated by molding and direct ink writing: A comparative study,”Advanced Engineering Materials, vol. 26, no. 22, p. 2400630, 2024
work page 2024
-
[12]
W. Fan, H. Li, Y . Xing, and D. Zhang, “Design and evaluation of a rapid monolithic manufacturing technique for a novel vision-based tactile sensor: C-sight,”Sensors, vol. 24, no. 14, p. 4603, 2024
work page 2024
-
[13]
Magictac: A novel high-resolution 3d multi-layer grid-based tactile sensor,
W. Fan, H. Li, and D. Zhang, “Magictac: A novel high-resolution 3d multi-layer grid-based tactile sensor,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 388–394
work page 2024
-
[14]
Willemet,The Biomechanics of the Tactile Perception of Friction
L. Willemet,The Biomechanics of the Tactile Perception of Friction. Springer, 2022
work page 2022
-
[15]
A retrospective view of mixture experiments,
J. A. Cornell, “A retrospective view of mixture experiments,”Quality engineering, vol. 23, no. 4, pp. 315–331, 2011
work page 2011
-
[16]
A. I. Khuri and S. Mukhopadhyay, “Response surface methodology,” Wiley interdisciplinary reviews: Computational statistics, vol. 2, no. 2, pp. 128–149, 2010
work page 2010
-
[17]
Desirability function approach: A review and performance evaluation in adverse conditions,
N. R. Costa, J. Lourenc ¸o, and Z. L. Pereira, “Desirability function approach: A review and performance evaluation in adverse conditions,” Chemometrics and Intelligent Laboratory Systems, vol. 107, no. 2, pp. 234–244, 2011
work page 2011
-
[18]
Deltact: A vision- based tactile sensor using a dense color pattern,
G. Zhang, Y . Du, H. Yu, and M. Y . Wang, “Deltact: A vision- based tactile sensor using a dense color pattern,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 778–10 785, 2022
work page 2022
-
[19]
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammereret al., “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845, 2020
work page 2020
-
[20]
Ai-driven inverse design of materials: Past, present, and future,
X.-Q. Han, X.-D. Wang, M.-Y . Xu, Z. Feng, B.-W. Yao, P.-J. Guo, Z.-F. Gao, and Z.-Y . Lu, “Ai-driven inverse design of materials: Past, present, and future,”Chinese Physics Letters, vol. 42, no. 2, p. 027403, 2025
work page 2025
-
[21]
W. L. Ng, G. L. Goh, G. D. Goh, J. S. J. Ten, and W. Y . Yeong, “Progress and opportunities for machine learning in materials and processes of additive manufacturing,”Advanced Materials, vol. 36, no. 34, p. 2310006, 2024
work page 2024
-
[22]
C. S. Ha, D. Yao, Z. Xu, C. Liu, H. Liu, D. Elkins, M. Kile, V . Deshpande, Z. Kong, M. Bauchyet al., “Rapid inverse design of metamaterials based on prescribed mechanical behavior through machine learning,”Nature Communications, vol. 14, no. 1, p. 5765, 2023
work page 2023
-
[23]
Z. Chai, Z. Zong, H. Yong, X. Ke, J. Zhu, H. Ding, C. F. Guo, and Z. Wu, “Tailoring stress–strain curves of flexible snapping mechanical metamaterial for on-demand mechanical responses via data-driven in- verse design,”Advanced Materials, vol. 36, no. 33, p. 2404369, 2024
work page 2024
-
[24]
Machine learning of material proper- ties: Predictive and interpretable multilinear models,
A. E. Allen and A. Tkatchenko, “Machine learning of material proper- ties: Predictive and interpretable multilinear models,”Science advances, vol. 8, no. 18, p. eabm7185, 2022
work page 2022
-
[25]
Extreme vertices design of mixture experiments,
R. McLean and V . Anderson, “Extreme vertices design of mixture experiments,”Technometrics, vol. 8, no. 3, pp. 447–454, 1966
work page 1966
-
[26]
Y . Gao, B. Yu, S. Xin, T. Mi, Y . Chen, Q. Yuan, L. Yang, and P. Li, “Use of extreme vertices method for analysis of how proportional composition affects component interactions and product distribution during hydrothermal treatment,”BioResources, vol. 11, no. 2, pp. 4899– 4920, 2016
work page 2016
-
[27]
H. Zhang, Z. Liu, S. Yin, and H. Xu, “A hybrid multi-objective optimization of functional ink composition for aerosol jet 3d printing via mixture design and response surface methodology,”Scientific Reports, vol. 13, no. 1, p. 2513, 2023
work page 2023
-
[28]
D. F. Swinehart, “The beer-lambert law,”Journal of chemical education, vol. 39, no. 7, p. 333, 1962
work page 1962
-
[29]
The fitting of scheff ´e-type models for estimating solubil- ities of multisolvent systems,
J. A. Cornell, “The fitting of scheff ´e-type models for estimating solubil- ities of multisolvent systems,”Journal of Biopharmaceutical Statistics, vol. 1, no. 2, pp. 303–329, 1991
work page 1991
-
[30]
C. Perez-Garcia, R. Ortigosa, J. Mart ´ınez-Frutos, and D. Garcia- Gonzalez, “Topology and material optimization in ultra-soft magneto- active structures: Making advantage of residual anisotropies,”Advanced Materials, p. e18489, 2025. APPENDIX A. Material Property Evaluation Details
work page 2025
-
[31]
Hardness:For elastomers, softness is a key material attribute that distinguishes them from rigid solids. In tactile sensing applications, an elastomer with appropriate compli- ance can respond effectively to contact stimuli through mea- surable surface deformation. Hardness is commonly used as a quantitative metric (the inverse of softness), describing th...
-
[32]
Poisson’s Ratio:Poisson’s ratiovis a fundamental mechanical parameter describing the relationship between transverse strainε trans and axial strainε axial under uniaxial loading. In tactile sensing applications, near-incompressibility (v= 0.5) implies that geometric deformation under external loading occurs with limited volume variation. v=− dεtrans dεaxi...
-
[33]
Uniaxial Tensile Experiment:Uniaxial tensile testing is widely used to characterise the mechanical behaviour of elastomers under unidirectional loading. Its primary objective is to obtain stress-strain curves for analysing tensile properties such as elastic modulus and tensile hysteresis. ASTM D412 is a well-established standard for evaluating the tensile...
-
[34]
Uniaxial Compressive Experiment:In practical tactile sensing scenarios, the dominant loading mode is compression, as normal force is required to establish effective contact. Consequently, the elastomer layer of the tactile sensor pri- marily undergoes compressive deformation during operation. Understanding the compressive behaviour of candidate mate- rial...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.