Resolving Conflicts Between RTOS Timekeeping and Uninterruptable Trusted Computing
Pith reviewed 2026-05-08 02:58 UTC · model grok-4.3
The pith
The secure world can restore consistent RTOS timekeeping by measuring elapsed time and updating missed ticks in the non-secure data structures after atomic operations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
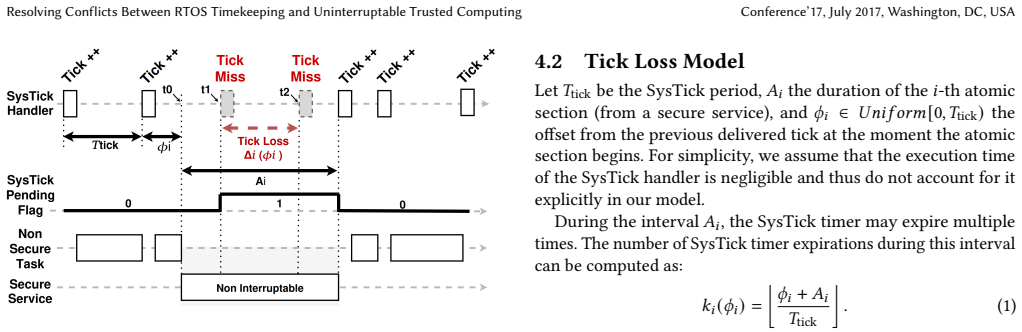
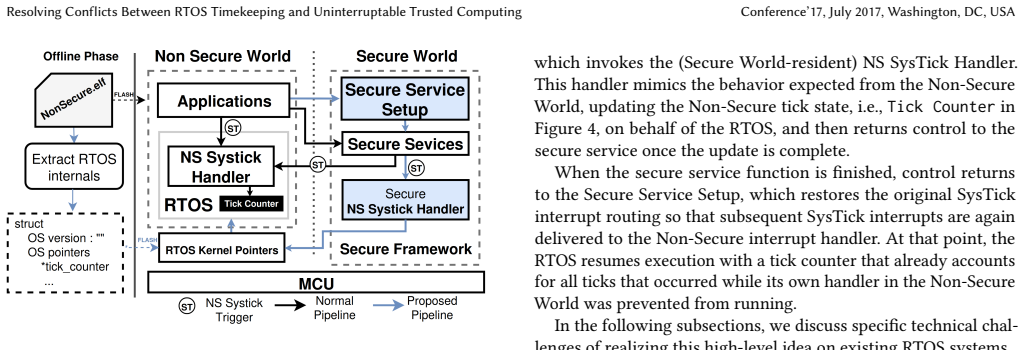
By letting the secure world measure elapsed real time during its uninterruptible trusted computing operations and then unobtrusively incrementing the RTOS time-keeping data structures with the corresponding number of missed SysTicks before re-enabling interrupts, the system regains a consistent monotonic notion of time across secure and non-secure worlds, permits secure services and real-time applications to coexist on the same microcontroller, and does so without any modification to the underlying RTOS or significant run-time overhead.
What carries the argument
The Secure-driven time synchronization mechanism that measures elapsed time inside the secure world and compensates the RTOS by updating its time-keeping data structures with missed ticks.
Load-bearing premise
The secure world can accurately measure real elapsed time while it runs uninterruptible, and directly editing the RTOS time data structures will always leave the RTOS internal state and real-time guarantees intact.
What would settle it
An execution trace in which an RTOS task's deadline or timer value deviates from real wall-clock time after a secure atomic operation that skipped multiple SysTicks, even though the secure world performed the described update.
Figures
read the original abstract
Trusted Execution Environments (TEEs) on low-power microcontrollers (e.g., ARM TrustZone-M) enable isolation of Secure and Non-Secure software but still require both worlds to share resources, including interrupt controllers. In this model, real-time applications and real-time operating systems (RTOS-s) are executed in the Non-Secure sub-system, whereas the Secure sub-system is typically reserved for a small set of pre-defined security (e.g., cryptographic) operations referred to as trusted computing services. However, many RTOS-s rely on periodic interrupts (SysTicks) to advance their own notion of time (time-keeping), and the delivery of this interrupt is essential for preserving real-time behavior. On the other hand, the security of many trusted computing services requires atomicity vis-a-vis the Non-Secure sub-system (where the RTOS resides), precluding SysTick handling. This paper first characterizes this conflict and then introduces a Secure-driven time synchronization mechanism in which the Secure World measures elapsed time and compensates the Non-Secure RTOS by unobtrusively updating the RTOS time-keeping data structures with the appropriate number of missed ticks before re-enabling interrupts and resuming the execution of the Non-Secure system. This approach restores a consistent, monotonic notion of time across worlds and enables secure coexistence of trusted computing services and RTOS-s on microcontrollers. Importantly, the proposed approach requires no modifications to the underlying RTOS and yields no significant run-time overhead.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper characterizes the conflict in microcontroller TEEs (e.g., ARM TrustZone-M) between uninterruptible Secure-world trusted computing services and the SysTick interrupts required by Non-Secure RTOS for timekeeping. It proposes a Secure-driven mechanism in which the Secure world measures elapsed real time during atomic operations and compensates by updating the RTOS time-keeping data structures with the appropriate number of missed ticks before resuming Non-Secure execution, claiming this restores a consistent monotonic notion of time, requires no modifications to the RTOS, and incurs no significant run-time overhead.
Significance. If the mechanism can be shown to preserve RTOS invariants and real-time guarantees across representative implementations, the result would enable practical coexistence of trusted computing services and real-time applications on the same low-power microcontroller. This addresses a concrete systems-security tension in embedded and IoT devices without requiring changes to existing RTOS codebases.
major comments (2)
- [Abstract] Abstract: the central claim that the approach 'requires no modifications to the underlying RTOS' and 'yields no significant run-time overhead' while preserving real-time guarantees is load-bearing for the contribution, yet the manuscript provides no implementation details, performance measurements, or verification that direct updates to tick counters maintain scheduler, timer, and deadline invariants.
- The design assumes that measuring elapsed time in the Secure world and incrementing RTOS tick structures is always sufficient to restore correctness. However, many RTOS maintain derived state (task delay queues, software timers, monotonic bases with overflow handling) whose invariants are not addressed by a blind tick increment; the paper supplies no model of the safe update set or evidence that the chosen structures are complete for arbitrary RTOS.
Simulated Author's Rebuttal
We thank the referee for their constructive review and for recognizing the significance of the TEE-RTOS timekeeping conflict. We address each major comment below, indicating revisions where the manuscript will be strengthened.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the approach 'requires no modifications to the underlying RTOS' and 'yields no significant run-time overhead' while preserving real-time guarantees is load-bearing for the contribution, yet the manuscript provides no implementation details, performance measurements, or verification that direct updates to tick counters maintain scheduler, timer, and deadline invariants.
Authors: The manuscript provides a conceptual description of the mechanism together with pseudocode for the elapsed-time measurement and tick-compensation logic. We agree, however, that the load-bearing claims require concrete support. In the revised manuscript we will add an implementation section describing a prototype on an ARM Cortex-M platform with a representative RTOS, performance measurements quantifying run-time overhead, and an analysis demonstrating that direct updates to the primary tick counter preserve scheduler, timer, and monotonic-time invariants under the stated assumptions. revision: yes
-
Referee: The design assumes that measuring elapsed time in the Secure world and incrementing RTOS tick structures is always sufficient to restore correctness. However, many RTOS maintain derived state (task delay queues, software timers, monotonic bases with overflow handling) whose invariants are not addressed by a blind tick increment; the paper supplies no model of the safe update set or evidence that the chosen structures are complete for arbitrary RTOS.
Authors: The mechanism compensates the core SysTick counter that serves as the monotonic time base for standard RTOS timekeeping. Upon resumption, the RTOS scheduler and timer subsystems operate on the corrected base, allowing derived structures such as delay queues to be processed at the next interrupt. We acknowledge that the paper does not supply a complete formal model covering every possible derived structure across arbitrary RTOS implementations. The revision will explicitly define the safe update set (primary tick counter and base monotonic time) and add a limitations paragraph noting that RTOS-specific extensions may be required for highly customized derived-state logic; the current contribution targets the common case of unmodified, standard RTOS kernels. revision: partial
Circularity Check
No circularity: design proposal with no derivation chain
full rationale
The paper is a systems design proposal that characterizes a conflict between TEE atomicity and RTOS SysTick timekeeping, then describes a compensation mechanism of measuring elapsed time in the secure world and updating non-secure tick counters. No equations, fitted parameters, predictions, or first-principles derivations appear in the provided text. Claims of preserved invariants and zero overhead are engineering assertions to be validated empirically, not results that reduce to self-referential inputs or self-citations by construction. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The secure world has access to an accurate, independent time source that can measure elapsed time during atomic operations.
- domain assumption Direct updates to RTOS time-keeping data structures by secure code will not violate RTOS internal state or scheduling invariants.
Reference graph
Works this paper leans on
-
[1]
Martín Abadi, Mihai Budiu, Ulfar Erlingsson, and Jay Ligatti. Control-flow integrity principles, implementations, and applications.ACM Transactions on Information and System Security (TISSEC), 13(1):1–40, 2009
work page 2009
-
[2]
C-flat: control-flow attestation for embedded systems software
Tigist Abera, N Asokan, Lucas Davi, Jan-Erik Ekberg, Thomas Nyman, Andrew Paverd, Ahmad-Reza Sadeghi, and Gene Tsudik. C-flat: control-flow attestation for embedded systems software. InACM CCS, 2016
work page 2016
-
[3]
Sok: Integrity, attestation, and auditing of program execution
Mahmoud Ammar, Adam Caulfield, and Ivan De Oliveira Nunes. Sok: Integrity, attestation, and auditing of program execution. InS&P. IEEE, 2025
work page 2025
-
[4]
Mahmoud Ammar et al. Delegated attestation: scalable remote attestation of commodity cps by blending proofs of execution with software attestation. In ACM WiSec, pages 37–47, 2021
work page 2021
-
[5]
Anonymous. Anonymous artifact. https://anonymous.4open.science/r/secure- systick-B6BC/README.md, 2025. Anonymous GitHub repository for artifact evaluation
work page 2025
-
[6]
Trusted firmware-m generic threat model
Arm. Trusted firmware-m generic threat model. https://trustedfirmware-m. readthedocs.io/en/latest/security/threat_models/generic_threat_model.html
-
[7]
usfi: Ultra-lightweight software fault isolation for iot-class devices
Zelalem Birhanu Aweke and Todd Austin. usfi: Ultra-lightweight software fault isolation for iot-class devices. In2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), pages 1015–1020. IEEE, 2018
work page 2018
-
[8]
Sanctuary: Arming trustzone with user-space enclaves
Ferdinand Brasser, David Gens, Patrick Jauernig, Ahmad-Reza Sadeghi, and Emmanuel Stapf. Sanctuary: Arming trustzone with user-space enclaves. In NDSS, 2019
work page 2019
-
[9]
Toctou, traps, and trusted computing
Sergey Bratus, Nihal D’Cunha, Evan Sparks, and Sean W Smith. Toctou, traps, and trusted computing. InInternational Conference on Trusted Computing, pages 14–32. Springer, 2008
work page 2008
-
[10]
Sok: Shining light on shadow stacks
Nathan Burow, Xinping Zhang, and Mathias Payer. Sok: Shining light on shadow stacks. In2019 IEEE Symposium on Security and Privacy (SP), pages 985–999. IEEE, 2019
work page 2019
-
[11]
Xavier Carpent, Karim Eldefrawy, Norrathep Rattanavipanon, and Gene Tsudik. Temporal consistency of integrity-ensuring computations and applications to embedded systems security. InProceedings of the 2018 on Asia Conference on Computer and Communications Security, pages 313–327, 2018
work page 2018
-
[12]
On the difficulty of software-based attestation of embedded devices
Claude Castelluccia, Aurélien Francillon, Daniele Perito, and Claudio Soriente. On the difficulty of software-based attestation of embedded devices. InProceedings of the 16th ACM conference on Computer and communications security, pages 400–409, 2009
work page 2009
-
[13]
Traces: Tee-based runtime auditing for commodity embed- ded systems
Adam Caulfield et al. Traces: Tee-based runtime auditing for commodity embed- ded systems. 2024
work page 2024
-
[14]
Sum: Effi- cient shadow stack protection on arm cortex-m.Computers & Security, 136:103568, 2024
Wonwoo Choi, Minjae Seo, Seongman Lee, and Brent Byunghoon Kang. Sum: Effi- cient shadow stack protection on arm cortex-m.Computers & Security, 136:103568, 2024
work page 2024
-
[15]
When firmware modifications attack: A case study of embedded exploitation
Ang Cui, Michael Costello, and Salvatore Stolfo. When firmware modifications attack: A case study of embedded exploitation. 2013
work page 2013
-
[16]
Casu: Compromise avoidance via secure update for low-end embedded systems
Ivan De Oliveira Nunes et al. Casu: Compromise avoidance via secure update for low-end embedded systems. InIEEE/ACM ICCAD, pages 1–9, 2022
work page 2022
-
[17]
Parsel: Towards a verified root-of-trust over sel4
Ivan De Oliveira Nunes et al. Parsel: Towards a verified root-of-trust over sel4. InIEEE/ACM ICCAD). IEEE, 2023
work page 2023
-
[18]
On the toctou problem in remote attestation
Ivan De Oliveira Nunes, Sashidhar Jakkamsetti, Norrathep Rattanavipanon, and Gene Tsudik. On the toctou problem in remote attestation. InProceedings of the 2021 ACM SIGSAC conference on computer and communications security, pages 2921–2936, 2021
work page 2021
-
[19]
Eclipse Corporation.Eclipse RTOS ThreadX. Eclipse, 2024. Accessed: 2025-01-01
work page 2024
-
[20]
HYDRA: hybrid design for remote attestation (using a formally verified microkernel)
Karim Eldefrawy et al. HYDRA: hybrid design for remote attestation (using a formally verified microkernel). InWiSec. ACM, 2017
work page 2017
-
[21]
SMART: Secure and minimal architecture for (establishing dynamic) root of trust
Karim Eldefrawy, Gene Tsudik, Aurélien Francillon, and Daniele Perito. SMART: Secure and minimal architecture for (establishing dynamic) root of trust. InNDSS, 2012
work page 2012
-
[22]
FreeRTOS Community.FreeRTOS Kernel. Amazon Web Services, 2024
work page 2024
-
[23]
{PISTIS}: Trusted computing architecture for low-end embedded systems
Michele Grisafi, Mahmoud Ammar, Marco Roveri, and Bruno Crispo. {PISTIS}: Trusted computing architecture for low-end embedded systems. In31st USENIX Security Symposium (USENIX Security 22), pages 3843–3860, 2022
work page 2022
-
[24]
Monowar Hasan, Sibin Mohan, Rakesh B. Bobba, and Rodolfo Pellizzoni. Explor- ing opportunistic execution for integrating security into legacy hard real-time systems. In2016 IEEE Real-Time Systems Symposium (RTSS), pages 123–134, 2016
work page 2016
-
[25]
Monowar Hasan, Sibin Mohan, Rodolfo Pellizzoni, and Rakesh B. Bobba. A design-space exploration for allocating security tasks in multicore real-time systems. In2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), pages 225–230, 2018
work page 2018
-
[26]
Securing real-time microcontroller systems through customized memory view switching
Chung Hwan Kim, Taegyu Kim, Hongjun Choi, Zhongshu Gu, Byoungyoung Lee, Xiangyu Zhang, and Dongyan Xu. Securing real-time microcontroller systems through customized memory view switching. InNDSS, 2018
work page 2018
-
[27]
TrustLite: A security architecture for tiny embedded devices
Patrick Koeberl, Steffen Schulz, Ahmad-Reza Sadeghi, and Vijay Varadharajan. TrustLite: A security architecture for tiny embedded devices. InEuroSys, 2014
work page 2014
-
[28]
Per Lindgren, Emil Fresk, Marcus Lindner, Andreas Lindner, David Pereira, and Luís Miguel Pinho. Abstract timers and their implementation onto the arm cortex-m family of mcus.ACM SIGBED Review, 13(1):48–53, 2016
work page 2016
-
[29]
Minitee—a lightweight trustzone-assisted tee for real-time systems.Electronics, 9(7):1130, 2020
Songran Liu, Nan Guan, Zhishan Guo, and Wang Yi. Minitee—a lightweight trustzone-assisted tee for real-time systems.Electronics, 9(7):1130, 2020
work page 2020
-
[30]
A survey of microar- chitectural side-channel vulnerabilities, attacks, and defenses in cryptography
Xiaoxuan Lou, Tianwei Zhang, Jun Jiang, and Yinqian Zhang. A survey of microar- chitectural side-channel vulnerabilities, attacks, and defenses in cryptography. ACM Computing Surveys (CSUR), 54(6):1–37, 2021
work page 2021
-
[31]
Kintsugi: Secure hotpatching for Code-Shadowing Real-Time em- bedded systems
Philipp Mackensen, Christian Niesler, Roberto Blanco, Lucas Davi, and Veelasha Moonsamy. Kintsugi: Secure hotpatching for Code-Shadowing Real-Time em- bedded systems. In34th USENIX Security Symposium (USENIX Security 25), pages 1847–1866, 2025
work page 2025
-
[32]
Enabling trusted scheduling in embedded systems
Ramya Jayaram Masti, Claudio Marforio, Aanjhan Ranganathan, Aurélien Fran- cillon, and Srdjan Capkun. Enabling trusted scheduling in embedded systems. In Proceedings of the 28th Annual Computer Security Applications Conference, pages 61–70, 2012
work page 2012
-
[33]
Optimized trusted execution for hard real-time applications on cots processors
Anway Mukherjee, Tanmaya Mishra, Thidapat Chantem, Nathan Fisher, and Ryan Gerdes. Optimized trusted execution for hard real-time applications on cots processors. InProceedings of the 27th International Conference on Real-Time Networks and Systems, pages 50–60, 2019
work page 2019
-
[34]
Isc-flat: On the conflict between control flow attestation and real-time operations
Antonio Joia Neto and Ivan De Oliveira Nunes. Isc-flat: On the conflict between control flow attestation and real-time operations. InRTAS. IEEE, 2023
work page 2023
-
[35]
Hera: Hotpatching of embedded real-time applications
Christian Niesler, Sebastian Surminski, and Lucas Davi. Hera: Hotpatching of embedded real-time applications. InNDSS, 2021
work page 2021
-
[36]
Sancus 2.0: A low-cost security architecture for iot devices.TOPS, 2017
Job Noorman, Jo Van Bulck, Jan Tobias Mühlberg, Frank Piessens, Pieter Maene, Bart Preneel, Ingrid Verbauwhede, Johannes Götzfried, Tilo Müller, and Felix Freiling. Sancus 2.0: A low-cost security architecture for iot devices.TOPS, 2017
work page 2017
-
[37]
VRASED: A verified Hardware/Software Co-Design for remote attestation
Ivan De Oliveira Nunes, Karim Eldefrawy, Norrathep Rattanavipanon, Michael Steiner, and Gene Tsudik. VRASED: A verified Hardware/Software Co-Design for remote attestation. InUSENIX Security Symposium, 2019
work page 2019
-
[38]
Freetee: When real-time and security meet
Sandro Pinto, Daniel Oliveira, Jorge Pereira, Jorge Cabral, and Adriano Tavares. Freetee: When real-time and security meet. In2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), pages 1–4. IEEE, 2015
work page 2015
-
[39]
Sanndro Pinto, Hugo Araujo, Daniel Oliveira, Jose Martins, and Adriano Tavares. Virtualization on trustzone-enabled microcontrollers? voilà! In2019 IEEE Real- Time and Embedded Technology and Applications Symposium (RTAS), pages 293–
-
[40]
Real time scheduling theory: A historical perspective.Real-time systems, 28(2):101–155, 2004
Lui Sha, Tarek Abdelzaher, Karl-Erik Årzén, Anton Cervin, Theodore Baker, Alan Burns, Giorgio Buttazzo, Marco Caccamo, John Lehoczky, and Aloysius K Mok. Real time scheduling theory: A historical perspective.Real-time systems, 28(2):101–155, 2004
work page 2004
-
[41]
Oat: Attesting operation integrity of embedded devices
Zhichuang Sun, Bo Feng, Long Lu, and Somesh Jha. Oat: Attesting operation integrity of embedded devices. InS&P. IEEE, 2020
work page 2020
-
[42]
Gang Tan et al. Principles and implementation techniques of software-based fault isolation.Foundations and Trends®in Privacy and Security, 1(3):137–198, 2017
work page 2017
-
[43]
Sherloc: Secure and holistic control-flow violation detection on embedded systems
Xi Tan and Ziming Zhao. Sherloc: Secure and holistic control-flow violation detection on embedded systems. InCCS. ACM, 2023
work page 2023
-
[44]
Enforcing {Forward-Edge} {Control- Flow} integrity in {GCC} & {LLVM}
Caroline Tice, Tom Roeder, Peter Collingbourne, Stephen Checkoway, Úlfar Erlingsson, Luis Lozano, and Geoff Pike. Enforcing {Forward-Edge} {Control- Flow} integrity in {GCC} & {LLVM}. In23rd USENIX security symposium (USENIX security 14), pages 941–955, 2014
work page 2014
-
[45]
Rt-tee: Real-time system availability for cyber-physical systems using arm trustzone
Jinwen Wang, Ao Li, Haoran Li, Chenyang Lu, and Ning Zhang. Rt-tee: Real-time system availability for cyber-physical systems using arm trustzone. InS&P. IEEE, 2022
work page 2022
-
[46]
Insectacide: Debugger-based holistic asynchronous cfi for embedded system
Yujie Wang, Cailani Lemieux Mack, Xi Tan, Ning Zhang, Ziming Zhao, Sanjoy Baruah, and Bryan C Ward. Insectacide: Debugger-based holistic asynchronous cfi for embedded system. InRTAS. IEEE, 2024
work page 2024
-
[47]
Zephyr Project.Zephyr Real-Time Operating System. Linux Foundation, 2024
work page 2024
-
[48]
Silhouette: Efficient protected shadow stacks for embedded systems
Jie Zhou, Yufei Du, Zhuojia Shen, Lele Ma, John Criswell, and Robert J Walls. Silhouette: Efficient protected shadow stacks for embedded systems. In29th USENIX Security Symposium (USENIX Security 20), pages 1219–1236, 2020
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.