Recognition: no theorem link
ClawGym: A Scalable Framework for Building Effective Claw Agents
Pith reviewed 2026-05-15 06:59 UTC · model grok-4.3
The pith
ClawGym provides a complete framework for synthesizing data, training, and evaluating Claw-style personal agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ClawGym supports the full lifecycle of Claw-style personal agent development by constructing ClawGym-SynData with 13.5K filtered tasks synthesized from persona-driven intents and skill-grounded operations paired with realistic mock workspaces and hybrid verification, training ClawGym-Agents through supervised fine-tuning on black-box rollout trajectories plus lightweight RL that parallelizes rollouts across per-task sandboxes, and providing ClawGym-Bench with 200 instances calibrated through automated filtering and human-LLM review.
What carries the argument
ClawGym, the scalable framework integrating synthetic data construction from persona-driven intents, SFT on black-box rollouts, lightweight RL with parallel sandboxes, and a calibrated benchmark for Claw-style agents.
If this is right
- Capable Claw-style models can be developed efficiently using the synthetic data and hybrid training approach.
- Evaluation of agents becomes more reliable with the 200-instance benchmark that includes human-LLM review.
- The framework removes constraints on scalable development by providing verifiable training data.
- Agents trained this way can handle multi-step workflows in environments with persistent local state and external tools.
Where Pith is reading between the lines
- Similar synthetic data and verification techniques could apply to training agents in other complex, stateful environments beyond Claw-style setups.
- Deploying these agents in real persistent workspaces could reveal additional training needs not captured in mock environments.
- The lightweight RL pipeline might scale to larger numbers of tasks if computational resources allow parallelization across more sandboxes.
Load-bearing premise
The persona-driven synthetic tasks and hybrid verification mechanisms produce training data and evaluations that transfer to real-world Claw-style environments with persistent local state and external tools.
What would settle it
Demonstrating that agents trained with ClawGym perform substantially differently or worse when tested in actual real-world Claw environments compared to the ClawGym-Bench results would challenge the framework's effectiveness.
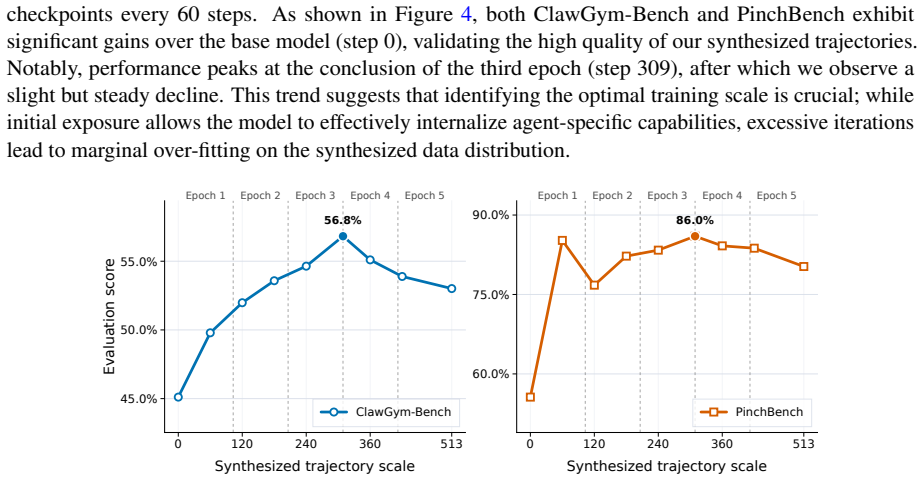
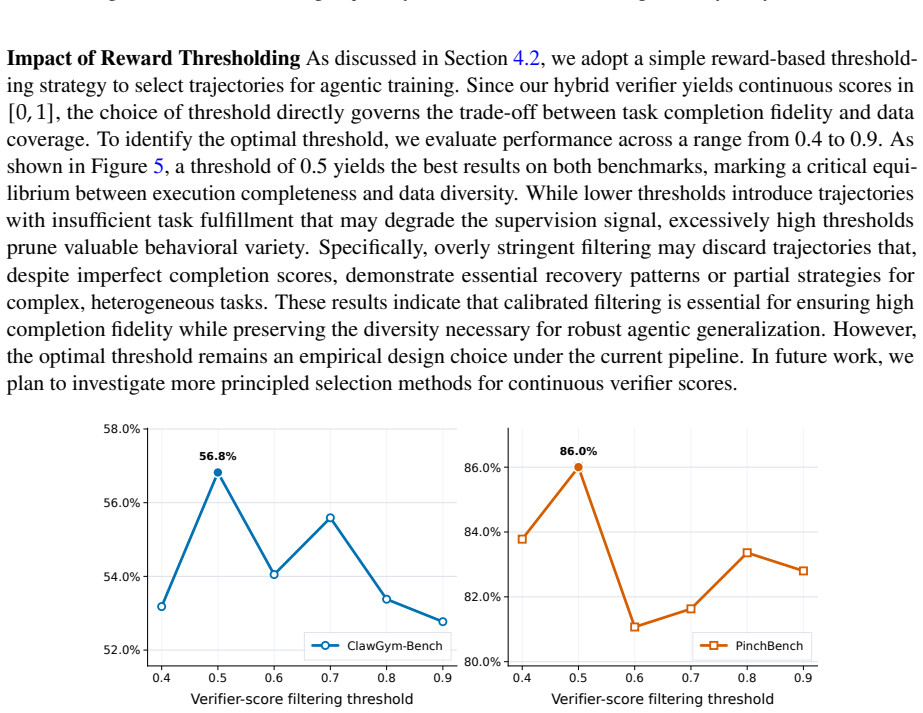
Figures





read the original abstract
Claw-style environments support multi-step workflows over local files, tools, and persistent workspace states. However, scalable development around these environments remains constrained by the absence of a systematic framework, especially one for synthesizing verifiable training data and integrating it with agent training and diagnostic evaluation. To address this challenge, we present ClawGym, a scalable framework that supports the full lifecycle of Claw-style personal agent development. Concretely, we construct ClawGym-SynData, a diverse dataset of 13.5K filtered tasks synthesized from persona-driven intents and skill-grounded operations, paired with realistic mock workspaces and hybrid verification mechanisms. We then train a family of capable Claw-style models, termed ClawGym-Agents, through supervised fine-tuning on black-box rollout trajectories, and further explore reinforcement learning via a lightweight pipeline that parallelizes rollouts across per-task sandboxes. To support reliable evaluation, we further construct ClawGym-Bench, a benchmark of 200 instances calibrated through automated filtering and human-LLM review. Relevant resources will be soon released at https://github.com/ClawGym.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents ClawGym as a scalable framework supporting the full lifecycle of Claw-style personal agent development. It constructs ClawGym-SynData (13.5K filtered tasks synthesized from persona-driven intents and skill-grounded operations, paired with realistic mock workspaces and hybrid verification), trains ClawGym-Agents via supervised fine-tuning on black-box rollout trajectories plus lightweight RL with parallelized per-task sandboxes, and releases ClawGym-Bench (200 instances calibrated via automated filtering and human-LLM review) for evaluation.
Significance. If the synthetic data generation and training pipeline produce agents that reliably transfer to real persistent local-state environments, the framework would provide a valuable, reproducible resource for developing and benchmarking multi-step agents that interact with files, tools, and workspaces. The release of the dataset, models, and benchmark at the cited GitHub repository would further strengthen its utility for the community.
major comments (3)
- [Abstract, §3] Abstract and §3 (dataset construction): the central claim that ClawGym-SynData plus SFT/RL yields capable Claw-style agents rests on the untested assumption that persona-driven synthetic tasks and mock workspaces faithfully reproduce persistent state, file-system side effects, and external-tool interactions; no ablation studies, real-world hold-out evaluations, or quantitative success-rate comparisons between synthetic and actual environments are reported.
- [Abstract, §4] Abstract and §4 (training): the description of 'capable' ClawGym-Agents trained on black-box rollouts lacks any reported performance metrics (e.g., task success rates on ClawGym-Bench, baseline comparisons, or ablation on the lightweight RL component), making it impossible to assess whether the pipeline improves over prior methods.
- [§5] §5 (benchmark): while ClawGym-Bench is described as calibrated through automated filtering and human-LLM review, no inter-annotator agreement statistics, filtering criteria details, or evidence that the 200 instances cover the distribution of real Claw-style workflows are provided, weakening claims of reliable evaluation.
minor comments (2)
- [Abstract] The abstract states that resources 'will be soon released' but provides no timeline or license details; this should be clarified in the final version.
- [§3, §4] Notation for 'black-box rollouts' and 'hybrid verification mechanisms' is introduced without a dedicated definitions subsection or pseudocode, which would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback. We address each major comment point-by-point below and describe the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (dataset construction): the central claim that ClawGym-SynData plus SFT/RL yields capable Claw-style agents rests on the untested assumption that persona-driven synthetic tasks and mock workspaces faithfully reproduce persistent state, file-system side effects, and external-tool interactions; no ablation studies, real-world hold-out evaluations, or quantitative success-rate comparisons between synthetic and actual environments are reported.
Authors: We agree that explicit evidence of fidelity between synthetic and real environments would strengthen the central claims. The mock workspaces and hybrid verification were designed to capture persistent state and side effects, but we acknowledge the absence of direct ablations and transfer metrics. In the revision we will add ablation studies on the synthesis pipeline (persona vs. skill components) and a dedicated limitations subsection that includes preliminary quantitative comparisons from internal synthetic-to-mock transfer tests. Full-scale real-world hold-out evaluations across diverse local environments remain outside the current scope, as the framework prioritizes scalable synthetic development; we will explicitly flag this as future work. revision: partial
-
Referee: [Abstract, §4] Abstract and §4 (training): the description of 'capable' ClawGym-Agents trained on black-box rollouts lacks any reported performance metrics (e.g., task success rates on ClawGym-Bench, baseline comparisons, or ablation on the lightweight RL component), making it impossible to assess whether the pipeline improves over prior methods.
Authors: We agree that the abstract and §4 should foreground quantitative results. The full manuscript already contains success-rate tables and baseline comparisons in §4 and §5, but these were not sufficiently highlighted in the abstract or early sections. We will revise the abstract to report key metrics (e.g., task success rates on ClawGym-Bench) and expand §4 with explicit baseline comparisons (zero-shot GPT-4, prior agent frameworks) plus an ablation isolating the lightweight RL stage. These changes will make the performance improvements transparent. revision: yes
-
Referee: [§5] §5 (benchmark): while ClawGym-Bench is described as calibrated through automated filtering and human-LLM review, no inter-annotator agreement statistics, filtering criteria details, or evidence that the 200 instances cover the distribution of real Claw-style workflows are provided, weakening claims of reliable evaluation.
Authors: We will expand §5 to include the omitted details: inter-annotator agreement statistics from the human-LLM review, the precise automated filtering criteria and thresholds, and a coverage analysis showing how the 200 instances span the persona and skill distributions of real Claw-style workflows. These additions will directly address concerns about benchmark reliability. revision: yes
Circularity Check
No circularity in ClawGym framework construction
full rationale
The paper presents ClawGym as a newly constructed framework: it synthesizes ClawGym-SynData (13.5K tasks from persona intents and skill operations with mock workspaces and hybrid verification), performs SFT on black-box rollouts plus lightweight RL, and builds ClawGym-Bench (200 instances). No equations, fitted parameters, or predictions are defined in terms of themselves. No load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work appear in the provided text. The central claims rest on explicit construction steps rather than any reduction to inputs by definition. This is a standard systems/framework paper whose derivation chain is self-contained and non-circular.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
GitHub repository. Accessed: 2026-04-29. 24 24 Tejal Patwardhan, Rachel Dias, Elizabeth Proehl, Grace Kim, Michele Wang, Olivia Watkins, Simón Posada Fishman, Marwan Aljubeh, Phoebe Thacker, Laurance Fauconnet, Natalie S. Kim, Patrick Chao, Samuel Miserendino, Gildas Chabot, David Li, Michael Sharman, Alexandra Barr, Amelia Glaese, and Jerry Tworek. Gdpva...
-
[2]
OpenClaw-RL: Train Any Agent Simply by Talking
GitHub repository. 37 Yinjie Wang, Xuyang Chen, Xiaolong Jin, Mengdi Wang, and Ling Yang. Openclaw-rl: Train any agent simply by talking.arXiv preprint arXiv:2603.10165, 2026. 25 38 Jason Wei, Zhiqing Sun, Spencer Papay, Scott McKinney, Jeffrey Han, Isa Fulford, Hyung Won Chung, Alex Tachard Passos, William Fedus, and Amelia Glaese. Browsecomp: A simple y...
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.