LASSA Architecture-Based Autonomous Fault-Tolerant Control of Unmanned Underwater Vehicles
Pith reviewed 2026-05-12 04:16 UTC · model grok-4.3
The pith
The LASSA architecture combines an LLM agent for identifying unknown faults and replanning tasks with a solver that enforces physical constraints, allowing unmanned underwater vehicles to achieve autonomous fault-tolerant control without依靠预
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The LASSA architecture enables UUVs to perform autonomous fault-tolerant control by letting the LLM reason about unknown faults and task replanning without hard-coded rules, while the solver suppresses physically infeasible hallucinations and the dual closed-loop structure balances intelligent decision-making with high-frequency real-time execution.
What carries the argument
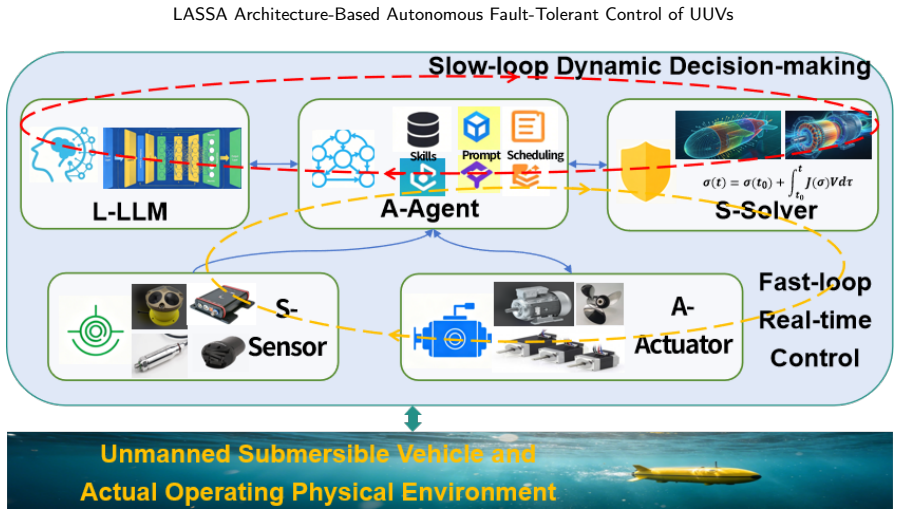
The LASSA (LLM-based Agent with Solver, Sensor and Actuator) architecture, in which the LLM handles fault identification and replanning, the solver checks physical feasibility constraints, and separate fast and slow loops manage real-time control versus high-level decisions.
If this is right
- UUVs can respond to unforeseen faults through reasoning rather than exhaustive pre-programmed rules.
- All commands become interpretable and verifiable before actuator execution.
- The dual-loop design simultaneously supports high-level autonomy and low-level real-time stability.
- No false fault detections occur during normal operation, as demonstrated in the reported lake runs.
- Replanning succeeds on the first solver invocation by widening the turning radius to 12 m and lowering speed to 1 kn under rudder fault.
Where Pith is reading between the lines
- The same LLM-plus-solver pattern could apply to other communication-constrained autonomous platforms such as surface vessels or aerial drones facing unexpected failures.
- Reducing dependence on exhaustive fault libraries might lower the engineering effort needed for new vehicle types or mission profiles.
- Open-ocean trials with variable currents and sensor noise would test whether the current three constraints remain sufficient outside controlled lake conditions.
Load-bearing premise
The LLM will correctly identify unknown faults and produce replans that the solver accepts, and the three solver constraints will catch every physically dangerous command under real ocean conditions.
What would settle it
A lake or ocean trial in which an unknown fault occurs, the LLM generates a replan, the solver approves the commands, yet the UUV loses control, collides, or fails to complete the mission because of an undetected physical violation.
Figures











read the original abstract
Unmanned underwater vehicles (UUVs) operate persistently in communication-constrained environments, thus requiring high-level autonomous fault-tolerant control under faulty operating conditions. Existing approaches rely heavily on predefined hard-coded rules and struggle to achieve effective fault-tolerant control against unforeseen faults. Although large language models (LLMs) possess powerful cognitive and reasoning capabilities, their inherent hallucinations remain a major obstacle to their application in UUV control systems. This paper proposes an intelligent control method based on the LASSA (LLM-based Agent with Solver, Sensor and Actuator) architecture. Within this architecture, an LLM identifies unknown faults and accomplishes task replanning via autonomous reasoning without hard-coded rules; the intelligent agent undertakes perception, scheduling and decision evaluation; the solver verifies physical boundary feasibility constraints prior to command transmission to the actuators. This architecture suppresses physically infeasible LLM hallucinations and ensures interpretable, verifiable decision-making. Moreover, it enables fast-slow dual closed-loop collaborative control, where the slow loop undertakes high-level dynamic decision-making and the fast loop guarantees high-frequency real-time control, simultaneously balancing decision intelligence and control timeliness. Lake experiments under normal and lower-rudder-fault conditions show that the framework detects trajectory tracking abnormalities, replans the route by adjusting the turning radius from 4m to 12m and reducing speed from 2kn to 1kn, passes all three solver constraints on the first invocation, and guides the UUV to complete the full mission; under normal conditions no false fault alarms are raised throughout the run.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the LASSA (LLM-based Agent with Solver, Sensor and Actuator) architecture for autonomous fault-tolerant control of UUVs. An LLM identifies unknown faults and performs task replanning without hard-coded rules; an intelligent agent handles perception, scheduling, and evaluation; and a solver enforces three physical boundary feasibility constraints before commands reach the actuators. This is claimed to suppress physically infeasible LLM hallucinations while enabling fast-slow dual closed-loop control. Lake experiments under normal conditions and a single lower-rudder fault show detection of trajectory abnormalities, replanning (turning radius from 4 m to 12 m, speed from 2 kn to 1 kn), first-try passage of all solver constraints, mission completion, and no false alarms.
Significance. If the central claim holds, the work would be significant for UUV autonomy by demonstrating integration of LLM reasoning with verifiable physical constraints, reducing dependence on predefined rules for unforeseen faults, and balancing high-level decision intelligence with real-time control. The reported lake-trial outcomes (specific radius/speed changes, solver pass rate, absence of false alarms) provide concrete, falsifiable evidence of the architecture in a controlled setting.
major comments (3)
- [architecture description (Section 3)] The manuscript refers to 'three solver constraints' that verify physical boundary feasibility and suppress infeasible LLM hallucinations, yet these constraints are not explicitly defined, listed, or derived anywhere in the architecture description. This is load-bearing for the central claim, as the guarantee of safety rests on their completeness; without the definitions it is impossible to assess whether they would catch dangerous commands arising from currents, density gradients, or novel hallucinations outside the tested envelope.
- [Lake experiments (Section 4)] Lake experiments (Section 4) report success for normal operation and only one lower-rudder fault, with a single successful replan that passed constraints on the first try. No quantitative tracking-error metrics, statistical success rates across repeated trials, baseline comparisons against rule-based or model-predictive fault-tolerant controllers, or tests under ocean-relevant disturbances (currents, multi-fault states) are provided. This leaves the claim of robustness to unforeseen faults only partially supported.
- [fault identification and replanning (Section 3.2)] The weakest assumption—that the LLM reliably identifies unknown faults and produces replans the solver will accept—is tested only in the one reported case. No failure-mode analysis, examples of LLM hallucinations that were rejected by the solver, or discussion of how the three constraints remain sufficient when fault combinations or environmental conditions differ from the lake trial is included.
minor comments (2)
- [Abstract and Section 4] The abstract states quantitative outcomes (radius change, speed change, solver pass rate) but the main text should include the corresponding time-series plots or data tables for reproducibility.
- [architecture overview] Notation for the fast and slow loops is introduced but not consistently labeled in any diagram or pseudocode; adding explicit labels would improve clarity of the dual closed-loop claim.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below, with clear indications of revisions to be incorporated in the next version of the manuscript.
read point-by-point responses
-
Referee: [architecture description (Section 3)] The manuscript refers to 'three solver constraints' that verify physical boundary feasibility and suppress infeasible LLM hallucinations, yet these constraints are not explicitly defined, listed, or derived anywhere in the architecture description. This is load-bearing for the central claim, as the guarantee of safety rests on their completeness; without the definitions it is impossible to assess whether they would catch dangerous commands arising from currents, density gradients, or novel hallucinations outside the tested envelope.
Authors: We agree that the three solver constraints must be explicitly defined, listed, and derived to support the central safety claim. This was insufficiently detailed in the original manuscript. In the revised version we will add a dedicated subsection (or expanded paragraph) within Section 3 that states the three physical boundary feasibility constraints in mathematical form, derives them from the UUV dynamics and actuator limits, and explains how each suppresses specific classes of infeasible LLM outputs. This revision will directly address the referee's concern about completeness and allow evaluation against untested disturbances. revision: yes
-
Referee: [Lake experiments (Section 4)] Lake experiments (Section 4) report success for normal operation and only one lower-rudder fault, with a single successful replan that passed constraints on the first try. No quantitative tracking-error metrics, statistical success rates across repeated trials, baseline comparisons against rule-based or model-predictive fault-tolerant controllers, or tests under ocean-relevant disturbances (currents, multi-fault states) are provided. This leaves the claim of robustness to unforeseen faults only partially supported.
Authors: We acknowledge that the experimental section is limited to a single fault type in a lake setting and lacks several quantitative elements. In the revision we will add the available quantitative tracking-error metrics (position RMSE, heading error, and speed deviation) extracted from the recorded lake-trial data for both normal and faulted runs. We will also insert an explicit limitations paragraph noting the absence of repeated-trial statistics, baseline controller comparisons, and ocean-disturbance tests, framing these as necessary future work. Because the current dataset does not contain the additional trials or comparisons requested, we cannot fully satisfy those aspects without new experiments. revision: partial
-
Referee: [fault identification and replanning (Section 3.2)] The weakest assumption—that the LLM reliably identifies unknown faults and produces replans the solver will accept—is tested only in the one reported case. No failure-mode analysis, examples of LLM hallucinations that were rejected by the solver, or discussion of how the three constraints remain sufficient when fault combinations or environmental conditions differ from the lake trial is included.
Authors: The demonstration of LLM-based fault identification and replanning is indeed based on the single lake-trial case presented. We will expand Section 3.2 with a failure-mode discussion that (a) illustrates how the solver would reject example classes of physically infeasible LLM outputs using the (now explicitly defined) constraints and (b) states the assumptions under which the three constraints are expected to remain sufficient. We will also add a short paragraph on the limits of the current validation with respect to multi-fault combinations and differing environmental conditions, again marking broader analysis as future work. revision: partial
- Statistical success rates over repeated trials, direct baseline comparisons with rule-based or MPC fault-tolerant controllers, and experimental validation under ocean currents or multi-fault states cannot be provided from the existing lake-trial dataset and would require additional field campaigns.
Circularity Check
No circularity: claims rest on experimental validation of architecture, not self-referential equations or derivations
full rationale
The paper describes the LASSA architecture (LLM agent + solver + sensor/actuator) for UUV fault-tolerant control and reports lake trial results under normal and single-fault conditions. No equations, first-principles derivations, fitted parameters, or predictions are presented that reduce to their own inputs by construction. The central claims (hallucination suppression via solver constraints, dual-loop control) are justified by observed experimental outcomes rather than any self-definitional loop, self-citation load-bearing premise, or ansatz smuggled through prior work. The three solver constraints are invoked as a practical filter but are not mathematically derived from the target result itself. This is a standard architecture-plus-experiment paper with no detectable circularity in its reasoning chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Large language models can perform reliable autonomous reasoning to identify unknown faults and replan tasks without hard-coded rules
- domain assumption The solver's physical boundary constraints are comprehensive enough to block all unsafe LLM-generated commands
invented entities (1)
-
LASSA architecture
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the solver verifies physical boundary feasibility constraints... three physical constraints, namely boundary feasibility, speed limits, and a fault-aware minimum turning radius
-
IndisputableMonolith/Foundation/ArrowOfTime.leanarrow_from_z unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
fast-slow dual closed-loop collaborative control
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
MadhusmitaPanda,BikramadityaDas,BidyadharSubudhi,andBib- huti Bhusan Pati. A comprehensive review of path planning algo- rithmsforautonomousunderwatervehicles.InternationalJournalof Automation and Computing, 17(3):321–352, January 2020
work page 2020
-
[2]
Daoliang Li, Peng Wang, and Ling Du. Path planning technolo- gies for autonomous underwater vehicles-a review.IEEE Access, 7:9745–9768, 2019
work page 2019
-
[3]
Feilong Liu, Bin Peng, Lianming Xu, and Tao Chen. Dynamic task allocation for multiple AUVs under weak underwater acoustic communication:ACBBA-basedsimulationstudy.JournalofMarine Science and Engineering, 14(3):237, January 2026
work page 2026
-
[4]
Qunhong Tian, Tao Wang, Bing Liu, and Guangtao Ran. Thruster faultdiagnosticsandfaulttolerantcontrolforautonomousunderwater vehicle with ocean currents.Machines, 10(7):582, July 2022
work page 2022
-
[5]
Xuxi Zhang, Kun Jiang, and Zhaojian Li. Multi-mode fault-tolerant trajectory tracking control of AUV under thruster failure conditions in complex environments.Ocean Engineering, April 2025
work page 2025
-
[6]
YiminChen,ShaowenHao,JianGao,JiarunWang,andLeLi. Fault- tolerantmodelpredictivecontrolforautonomousunderwatervehicles considering unknown disturbances.Journal of Marine Science and Engineering, 13(1):171, January 2025
work page 2025
-
[7]
Xiaofeng Liu, Mingjun Zhang, Xing Liu, and Wende Zhao. Finite- time extended state observe based fault tolerant control for au- tonomous underwater vehicle with unknown thruster fault.Journal of Marine Science and Engineering, 10(11):1624, November 2022
work page 2022
-
[8]
Ye Li, Jiayu He, Qiang Zhang, Wenjun Zhang, and Yanying Li. Predefined-time fault-tolerant trajectory tracking control for au- tonomous underwater vehicles considering actuator saturation.Ac- tuators, 12(4):171, April 2023
work page 2023
-
[9]
Yimin Chen, Yazhou Wang, Yang Yu, Jiarun Wang, and Jian Gao. A fault diagnosis method for the autonomous underwater vehicle via meta-self-attention multi-scale cnn.Journal of Marine Science and Engineering, 11(6):1121, May 2023
work page 2023
-
[10]
Zimu Zhang, Yunkai Wu, Yang Zhou, and Dahai Hu. Fault-tolerant control of autonomous underwater vehicle actuators based on takagi and sugeno fuzzy and pseudo-inverse quadratic programming under constraints.Sensors, 24(10):3029, May 2024
work page 2024
-
[11]
Jian Xu, Xing Wang, Ping Liu, and Qiaoyu Duan. Adaptive proportional-integralslidingmode-basedfaulttolerantcontrolforau- tonomous underwater vehicles with thrusters saturation and potential failure.Journal of Marine Science and Engineering, 10(11):1614, November 2022
work page 2022
-
[12]
ChatGPT for robotics: Design principles and model abilities.IEEE Access, 12:55682–55696, 2024
SaiH.Vemprala,RogerioBonatti,ArthurBucker,andAshishKapoor. ChatGPT for robotics: Design principles and model abilities.IEEE Access, 12:55682–55696, 2024
work page 2024
-
[13]
Enhancing robot task planning and execution through multi-layer large language models
Zhirong Luan, Yujun Lai, Rundong Huang, Shuanghao Bai, Yuedi Zhang, Haoran Zhang, and Qian Wang. Enhancing robot task planning and execution through multi-layer large language models. Sensors, 24(5):1687, March 2024
work page 2024
-
[14]
A framework for neurosymbolic robot action planning using large language models
Alessio Capitanelli and Fulvio Mastrogiovanni. A framework for neurosymbolic robot action planning using large language models. Frontiers in Neurorobotics, 18, June 2024
work page 2024
-
[15]
Vineet Bhat, Ahmet Umur Kaypak, Pramod Krishnamurthy, Ramesh Karri, and Farshad Khorrami. Grounding large language models for robot task planning using closed-loop state feedback.Advanced Robotics Research, November 2025
work page 2025
-
[16]
Oceanchat: Piloting autonomous underwater vehicles in natural lan- guage, 2023
Ruochu Yang, Mengxue Hou, Junkai Wang, and Fumin Zhang. Oceanchat: Piloting autonomous underwater vehicles in natural lan- guage, 2023
work page 2023
-
[17]
Jingzehua Xu, Zhuoli Zheng, Zhenghao Wang, Ziwei Han, Yilong Ren,andShuaiZhang. Whenmotionlearnstolisten:Diffusion-prior Lyapunov actor-critic framework with LLM guidance for stable and robust AUV control in underwater tasks, 2025
work page 2025
- [18]
-
[19]
Chao Hou, XiaoGang Li, Hongbo Wang, Peng Zhai, and Hao Lu. Fuzzy linear extended states observer-based iteration learning fault-tolerant control for autonomous underwater vehicle trajectory- trackingsystem.IETControlTheory&Applications,17(3):270–283, February 2023
work page 2023
-
[20]
Chuanfa Chen, Xiang Gao, Yueming Li, Xuezhi Chen, Jian Cao, and Yinghao Zhang. Deep reinforcement learning approach for X-rudder AUVs fault diagnosis based on deep Q-network.Journal of Marine Science and Application, January 2025. First Author et al. Page 17 of 18 LASSA Architecture-Based Autonomous Fault-Tolerant Control of UUVs
work page 2025
-
[21]
Yang Jiang, Bo He, Jia Guo, Pengfei Lv, Xiaokai Mu, Xin Zhang, andFeiYu. Actuatorweakfaultdiagnosisinautonomousunderwater vehicle based on tri-stable stochastic resonance.Applied Sciences, 10(6):2048, March 2020
work page 2048
-
[22]
Yushan Sun, Zikai Wang, and Guocheng Zhang. Fault diagnosis method of autonomous underwater vehicle based on deep learn- ing.IOP Conference Series: Materials Science and Engineering, 470:012035, January 2019
work page 2019
-
[23]
Yunkai Wu, Aodong Wang, Yang Zhou, Zhiyu Zhu, and Qingjun Zeng. Fault diagnosis of autonomous underwater vehicle with miss- ing data based on multi-channel full convolutional neural network. Machines, 11(10):960, October 2023
work page 2023
-
[24]
Jiayu He, Ye Li, Yanqing Jiang, Yueming Li, and Li An. Propeller fault diagnosis based on a rank particle filter for autonomous under- water vehicles.Brodogradnja, 69(2):147–164, April 2018
work page 2018
-
[25]
JiayuHe,YeLi,YuemingLi,YanqingJiang,andLiAn. Faultdiagno- sisinautonomousunderwatervehiclepropellerinthetransitionstage basedongp-rpf.InternationalJournalofAdvancedRoboticSystems, 15(6), November 2018
work page 2018
-
[26]
Yinjing Guo, Hui Liu, Xiaojing Fan, and Wenhong Lyu. Research progress of path planning methods for autonomous underwater vehi- cle.Mathematical Problems in Engineering, 2021:1–25, February 2021
work page 2021
-
[27]
Liang Yang, Juntong Qi, Dalei Song, Jizhong Xiao, Jianda Han, and Yong Xia. Survey of robot 3d path planning algorithms.Journal of Control Science and Engineering, 2016:1–22, 2016
work page 2016
-
[28]
CheeShengTan,RosmiwatiMohd-Mokhtar,andMohdRizalArshad. A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms.IEEE Access, 9:119310–119342, 2021
work page 2021
-
[29]
Yangfan Cui, Peibin Zhu, Guowei Lei, Peng Chen, and Guangsong Yang. Energy-efficient multiple autonomous underwater vehicle path planning scheme in underwater sensor networks.Electronics, 12(15):3321, August 2023
work page 2023
-
[30]
Enric Galceran, Ricard Campos, Narcís Palomeras, David Ribas, Marc Carreras, and Pere Ridao. Coverage path planning with real- time replanning and surface reconstruction for inspection of three- dimensionalunderwaterstructuresusingautonomousunderwaterve- hicles:Coveragepathplanningwithreal-timereplanningandsurface reconstruction.JournalofFieldRobotics,32(...
work page 2014
-
[31]
Xu Liao, Le Li, Chuangxia Huang, Xian Zhao, and Shumin Tan. Noisy dueling double deep q-network algorithm for autonomous underwater vehicle path planning.Frontiers in Neurorobotics, 18, October 2024
work page 2024
-
[32]
Zhuo Wang, Hao Lu, Hongde Qin, and Yancheng Sui. Autonomous underwater vehicle path planning method of soft actor–critic based on game training.Journal of Marine Science and Engineering, 10(12):2018, December 2022
work page 2018
-
[33]
JianjunNi,LiuyingWu,PengfeiShi,andSimonX.Yang. Adynamic bioinspired neural network based real-time path planning method for autonomous underwater vehicles.Computational Intelligence and Neuroscience, 2017:1–16, 2017
work page 2017
-
[34]
YushanSun,XiaokunLuo,XiangruiRan,andGuochengZhang.A2d optimal path planning algorithm for autonomous underwater vehicle driving in unknown underwater canyons.Journal of Marine Science and Engineering, 9(3):252, February 2021
work page 2021
-
[35]
Large language models for chemistry robotics.Autonomous Robots, 47(8):1057–1086, October 2023
Naruki Yoshikawa, Marta Skreta, Kourosh Darvish, Sebastian Arellano-Rubach, Zhi Ji, Lasse Bjørn Kristensen, Andrew Zou Li, Yuchi Zhao, Haoping Xu, Artur Kuramshin, Alán Aspuru-Guzik, Florian Shkurti, and Animesh Garg. Large language models for chemistry robotics.Autonomous Robots, 47(8):1057–1086, October 2023
work page 2023
-
[36]
Jianwei Zhu, Xueying Sun, Qiang Zhang, and Mingmin Liu. Vla- grasp: a vision-language-action modeling with cross-modality fusion fortask-orientedgrasping.Complex&IntelligentSystems,11(6),May 2025
work page 2025
-
[37]
Christopher E. Mower, Yuhui Wan, Hongzhan Yu, Antoine Gros- nit, Jonas Gonzalez-Billandon, Matthieu Zimmer, Puze Liu, Daniel Palenicek, Davide Tateo, Jan Peters, Kaixian Qu, Mike Zhang, Guowei Lan, Andrei Cramariuc, Cesar Cadena, Marco Hutter, Guangjian Tian, Yuzhen Zhuang, Kun Shao, Xingyue Quan, Jianye Hao,JunWang,andHaithamBou-Ammar. Arobotoperatingsys...
work page 2026
-
[38]
RuaridhMon-Williams,GenLi,RanLong,WenqianDu,andChristo- pher G. Lucas. Embodied large language models enable robots to complete complex tasks in unpredictable environments.Nature Machine Intelligence, 7(4):592–601, 2025
work page 2025
-
[39]
Replan: Robotic replanning with perception and language models, 2024
Marta Skreta, Zihan Zhou, Jia Lin Yuan, Kourosh Darvish, Alán Aspuru-Guzik, and Animesh Garg. Replan: Robotic replanning with perception and language models, 2024
work page 2024
-
[40]
Junyu Gao, Xuan Yao, Yong Rui, and Changsheng Xu. Building em- bodiedEvoAgent:Abrain-inspiredparadigmforbridgingmultimodal large models and world models. InProceedings of the 33rd ACM International Conference on Multimedia (MM ’25). ACM, 2025
work page 2025
-
[41]
GuanwenXie,JingzehuaXu,YimianDing,ZhiZhang,ShuaiZhang, and Yi Li. Never too prim to swim: An LLM-enhanced RL-based adaptiveS-surfacecontrollerforAUVsunderextremeseaconditions, 2025
work page 2025
-
[42]
Waseem Akram, Muhayy Ud Din, Abdelhaleem Saad, and Irfan Hussain. AquaChat: An LLM-guided ROV framework for adap- tive inspection of aquaculture net pens.Aquacultural Engineering, 111:102607, 2025
work page 2025
-
[43]
Word2Wave: Language driven mission programming for efficient subsea deployments of marine robots
Ruo Chen, David Blow, Adnan Abdullah, and Md Jahidul Islam. Word2Wave: Language driven mission programming for efficient subsea deployments of marine robots. In2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025
work page 2025
-
[44]
Kim Alexander Christensen, Alexey Gusev, Andreas Gudahl Tufte, Ole Andreas Alsos, and Martin Steinert. AI Captain: Conversational mission planning and executionsystem for autonomous surface vehi- cles.Ocean Engineering, 338:121988, 2025. First Author et al. Page 18 of 18 LASSA Architecture-Based Autonomous Fault-Tolerant Control of UUVs Figure 7:Exp-S thr...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.