Recognition: 2 theorem links
· Lean TheoremGSMap: 2D Gaussians for Online HD Mapping
Pith reviewed 2026-05-12 02:09 UTC · model grok-4.3
The pith
Modeling HD map elements as ordered sequences of 2D Gaussians unifies pixel-level geometry with topological structure for online mapping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
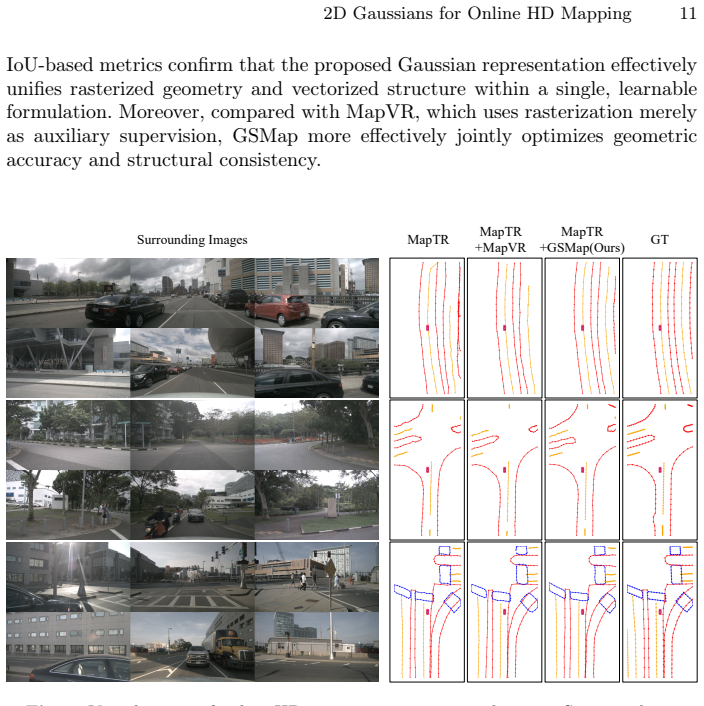
GSMap models each map element as an ordered sequence of 2D Gaussians whose centers correspond to the vertices of the vectorized polyline or polygon. This formulation supports simultaneous optimization through differentiable rasterization that applies pixel-level geometric constraints and topology-aware vectorization that preserves structural regularity, resulting in improved performance on nuScenes and Argoverse2 while remaining compatible with existing HD mapping architectures.
What carries the argument
The ordered sequence of 2D Gaussians per map element, with centers aligned to polyline vertices, that carries both raster and vector optimization signals.
If this is right
- The Gaussian representation improves overall mapping accuracy on standard autonomous-driving benchmarks.
- The same model remains compatible with prior vector and raster mapping networks.
- Joint optimization of geometry and topology becomes possible inside one differentiable pipeline.
- Map outputs retain both pixel fidelity and clean structural connectivity.
Where Pith is reading between the lines
- The continuous Gaussian centers could support smoother interpolation between map vertices during online updates.
- The representation might transfer to related tasks such as lane boundary estimation or drivable-area segmentation without separate heads.
- Because the formulation stays differentiable, it could be inserted into larger end-to-end driving models that back-propagate map errors directly into perception.
Load-bearing premise
That representing map elements as ordered sequences of 2D Gaussians will allow geometric and topological objectives to be optimized jointly without introducing accuracy losses or new trade-offs.
What would settle it
Running the method on the same nuScenes and Argoverse2 splits and finding no simultaneous gains in both geometric metrics such as Chamfer distance and topological metrics such as connectivity preservation would disprove the central claim.
Figures




read the original abstract
Accurate High-Definition (HD) map construction is critical for autonomous driving, yet existing methods face a fundamental trade-off: vectorization-based approaches preserve topology but struggle with geometric fidelity, while rasterization-based approaches enable precise geometric supervision but produce unstructured outputs. To bridge this gap, we propose GSMap, a novel framework that unifies both paradigms via a learnable 2D Gaussian representation. Each map element is modeled as an ordered sequence of 2D Gaussians, whose centers correspond to the vertices of the vectorized polyline/polygon. This formulation enables simultaneous optimization through: (1) Differentiable rasterization that enforces pixel-level geometric constraints, and (2) Topology-aware vectorization that maintains structural regularity. Experiments on both nuScenes and Argoverse2 demonstrate that our Gaussian-based representation effectively unifies geometric and topological learning, achieving significant performance improvements and demonstrating strong compatibility with existing HD mapping architectures. Code will be available at https://github.com/peakpang/GSMap
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes GSMap, a framework for online HD map construction that represents each map element as an ordered sequence of 2D Gaussians whose centers correspond to polyline/polygon vertices. This is claimed to unify vectorization-based methods (which preserve topology) and rasterization-based methods (which enable precise geometric supervision) by supporting both differentiable rasterization for pixel-level geometric constraints and topology-aware vectorization for structural regularity. Experiments on nuScenes and Argoverse2 are said to demonstrate significant performance gains and compatibility with existing architectures.
Significance. If the 2D Gaussian representation can indeed support joint optimization of geometry and topology without new trade-offs or loss of fidelity, the work would address a core limitation in current HD mapping pipelines for autonomous driving. The explicit plan to release code supports reproducibility. However, the absence of any quantitative results, ablations, or implementation details in the manuscript makes it difficult to assess whether the claimed unification delivers measurable advances over prior vector or raster baselines.
major comments (1)
- [Abstract] Abstract: The central unification claim—that differentiable rasterization of the 2D Gaussians enforces pixel-level geometric constraints on the full map elements—appears under-specified. Because each element is defined as an ordered sequence whose centers are exactly the polyline vertices, standard 2D Gaussian splatting would produce intensity only at those discrete vertex locations. Without an explicit mechanism (e.g., analytic line-segment rendering, per-segment Gaussians, or a continuous density along edges) to rasterize the connecting segments, the geometric loss can at best supervise vertex placement and cannot directly constrain the geometry of the edges that constitute the map element. This creates an internal gap between the topology objective (satisfied by construction) and the geometric objective, precisely the trade-off the weakest assumption claims to avoid.
minor comments (2)
- [Abstract] Abstract: The statement 'achieving significant performance improvements' is made without any numerical results, baseline comparisons, or error metrics, which prevents evaluation of the practical impact.
- [Abstract] Abstract: No ablation studies, error analysis, or implementation details (e.g., how the Gaussian covariances are parameterized or how the topology-aware vectorization is implemented) are supplied, making the method difficult to reproduce or compare.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback. The comment on the abstract highlights an important point about clarity in our presentation of the rasterization mechanism. We address this below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central unification claim—that differentiable rasterization of the 2D Gaussians enforces pixel-level geometric constraints on the full map elements—appears under-specified. Because each element is defined as an ordered sequence whose centers are exactly the polyline vertices, standard 2D Gaussian splatting would produce intensity only at those discrete vertex locations. Without an explicit mechanism (e.g., analytic line-segment rendering, per-segment Gaussians, or a continuous density along edges) to rasterize the connecting segments, the geometric loss can at best supervise vertex placement and cannot directly constrain the geometry of the edges that constitute the map element. This creates an internal gap between the topology objective (satisfied by construction) and the geometric objective, precisely the trade-off the weakest assumption claims to avoid.
Authors: We appreciate the referee's precise identification of this ambiguity in the abstract. While the abstract summarizes the approach at a high level, the full manuscript (Section 3.2) specifies the rasterization: each ordered sequence of 2D Gaussians at polyline vertices is rendered via a differentiable module that computes per-pixel intensity using the minimum distance to the connecting line segments, with a Gaussian kernel applied both along the segment direction and perpendicular to it. This produces continuous density along edges rather than isolated points, allowing the geometric loss to directly supervise full element geometry (vertices and edges) while the ordering enforces topology. We will revise the abstract to explicitly reference this line-segment-aware rasterization, e.g., by adding: 'via differentiable rasterization of Gaussian-smoothed polylines that enforces pixel-level geometric constraints on entire map elements.' revision: yes
Circularity Check
No significant circularity in the GSMap modeling choice
full rationale
The paper introduces a 2D Gaussian representation for HD map elements as an explicit design decision: each element is an ordered sequence of Gaussians with centers at polyline vertices. This choice is presented as enabling both differentiable rasterization and topology-aware vectorization without any derivation chain, equations, or first-principles steps that reduce a claimed result back to fitted inputs or self-referential definitions. No predictions are made that are statistically forced by construction, no uniqueness theorems are invoked via self-citation, and no ansatz is smuggled in. The unification claim rests on the independent modeling innovation rather than tautological reduction, making the framework self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Ordered sequence of 2D Gaussians for map elements
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Each map element is modeled as an ordered sequence of 2D Gaussians, whose centers correspond to the vertices of the vectorized polyline/polygon... Differentiable rasterization that enforces pixel-level geometric constraints, and (2) Topology-aware vectorization
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
GSMap consistently improves performance across all categories and both evaluation metrics... APChamfer and APraster
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
- [2]
- [3]
-
[4]
Chen, J., Deng, R., Furukawa, Y.: Polydiffuse: Polygonal shape reconstruction via guided set diffusion models. In: NeurIPS. pp. 1863–1888 (2023)
work page 2023
-
[5]
IEEE Transactions on Pattern Analysis and Ma- chine Intelligence (2024)
Chen, L., Wu, P., Chitta, K., Jaeger, B., Geiger, A., Li, H.: End-to-end autonomous driving: Challenges and frontiers. IEEE Transactions on Pattern Analysis and Ma- chine Intelligence (2024)
work page 2024
- [6]
- [7]
- [8]
- [9]
- [10]
- [11]
- [12]
-
[13]
Huang, B., Yu, Z., Chen, A., Geiger, A., Gao, S.: 2d gaussian splatting for geo- metrically accurate radiance fields. In: SIGGRAPH. pp. 1–11 (2024)
work page 2024
- [14]
-
[15]
arXiv preprint arXiv:2212.02181 (2022)
Jiang, B., Chen, S., Wang, X., Liao, B., Cheng, T., Chen, J., Zhou, H., Zhang, Q., Liu, W., Huang, C.: Perceive, interact, predict: Learning dynamic and static clues for end-to-end motion prediction. arXiv preprint arXiv:2212.02181 (2022)
- [16]
- [17]
-
[18]
IEEE Transactions on Pattern Analysis and Machine Intelligence (2024)
Li, Z., Wang, W., Li, H., Xie, E., Sima, C., Lu, T., Yu, Q., Dai, J.: Bevformer: learningbird’s-eye-viewrepresentationfromlidar-cameraviaspatiotemporaltrans- formers. IEEE Transactions on Pattern Analysis and Machine Intelligence (2024)
work page 2024
-
[19]
Liang, T., Xie, H., Yu, K., Xia, Z., Lin, Z., Wang, Y., Tang, T., Wang, B., Tang, Z.: Bevfusion: A simple and robust lidar-camera fusion framework. In: NeurIPS. pp. 10421–10434 (2022)
work page 2022
-
[20]
Liao, B., Chen, S., Wang, X., Cheng, T., Zhang, Q., Liu, W., Huang, C.: Maptr: Structured modeling and learning for online vectorized hd map construction. In: ICLR (2023)
work page 2023
-
[21]
International Journal of Computer Vision133(3), 1352–1374 (2025) 16 Z
Liao, B., Chen, S., Zhang, Y., Jiang, B., Zhang, Q., Liu, W., Huang, C., Wang, X.: Maptrv2: An end-to-end framework for online vectorized hd map construction. International Journal of Computer Vision133(3), 1352–1374 (2025) 16 Z. Zeng et al
work page 2025
- [22]
- [23]
-
[24]
Journal of Sensor and Actuator Networks14(1), 15 (2025)
Lyu, H., Berrio Perez, J.S., Huang, Y., Li, K., Shan, M., Worrall, S.: Online high- definition map construction for autonomous vehicles: A comprehensive survey. Journal of Sensor and Actuator Networks14(1), 15 (2025)
work page 2025
-
[25]
Commu- nications of the ACM65(1), 99–106 (2021)
Mildenhall, B., Srinivasan, P.P., Tancik, M., Barron, J.T., Ramamoorthi, R., Ng, R.: Nerf: Representing scenes as neural radiance fields for view synthesis. Commu- nications of the ACM65(1), 99–106 (2021)
work page 2021
- [26]
- [27]
- [28]
- [29]
- [30]
-
[31]
Vaswani,A.,Shazeer,N.,Parmar,N.,Uszkoreit,J.,Jones,L.,Gomez,A.N.,Kaiser, Ł., Polosukhin, I.: Attention is all you need. In: NeurIPS (2017)
work page 2017
-
[32]
Argoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
Wilson, B., Qi, W., Agarwal, T., Lambert, J., Singh, J., Khandelwal, S., Pan, B., Kumar, R., Hartnett, A., Pontes, J.K., et al.: Argoverse 2: Next generation datasets for self-driving perception and forecasting. arXiv preprint arXiv:2301.00493 (2023)
work page internal anchor Pith review arXiv 2023
- [33]
- [34]
-
[35]
Yang, J., Jiang, M., Yang, S., Tan, X., Li, Y., Ding, E., Wang, H., Wang, J.: Mgmapnet: Multi-granularity representation learning for end-to-end vectorized hd map construction. In: ICLR (2025)
work page 2025
- [36]
-
[37]
Zhang, G., Lin, J., Wu, S., Luo, Z., Xue, Y., Lu, S., Wang, Z., et al.: Online map vectorization for autonomous driving: A rasterization perspective. In: NeurIPS. pp. 31865–31877 (2023)
work page 2023
-
[38]
Zhang, J., Singh, S., et al.: Loam: Lidar odometry and mapping in real-time. In: RSS. pp. 1–9 (2014)
work page 2014
- [39]
- [40]
-
[41]
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., Dai, J.: Deformable DETR: deformable transformers for end-to-end object detection. In: ICLR (2021)
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.