Recognition: 2 theorem links
· Lean TheoremEvoStreaming: Your Offline Video Model Is a Natively Streaming Assistant
Pith reviewed 2026-05-12 04:59 UTC · model grok-4.3
The pith
Offline video models can become effective streaming assistants through self-evolution using just 1,000 self-generated samples and no architecture changes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Strong offline VideoLLMs retain useful visual understanding but lack an interaction policy for deciding when to respond. Using the base model itself as data generator, relevance annotator, and roll-out policy, EvoStreaming synthesizes streaming trajectories without external supervision. With only 1,000 self-generated samples and no architectural changes, the approach improves the overall RealStreamEval score by up to 10.8 points across five open VideoLLM backbones while largely preserving offline video performance.
What carries the argument
EvoStreaming, a self-evolved streaming adaptation framework in which the base model acts as data generator, relevance annotator, and roll-out policy to synthesize streaming trajectories.
If this is right
- VideoLLMs can acquire effective streaming interaction policies through self-generated data rather than large external datasets.
- The timing and verbosity policy can be improved separately from the core visual understanding already present in offline models.
- The self-evolution method generalizes across multiple open VideoLLM architectures including Qwen2/2.5/3-VL, InternVL-3.5, and MiniCPM-V4.5.
- Data efficiency reaches 139 times less than leading prior streaming instruction-tuning approaches while maintaining offline capabilities.
- Existing offline models can be turned into streaming assistants without any model architecture modifications.
Where Pith is reading between the lines
- Self-evolution loops of this kind might allow models to iteratively refine their own streaming policies across multiple rounds of data generation.
- The same principle could apply to other real-time decision tasks in multimodal systems such as audio or image sequences.
- Standard offline benchmarks may hide interaction weaknesses that only appear under frame-by-frame evaluation protocols.
- This approach reduces dependence on human-annotated streaming data for adapting future video models.
Load-bearing premise
The base model's self-generated streaming trajectories, relevance annotations, and roll-out policies are sufficiently accurate and unbiased to train an improved interaction policy without external supervision or validation.
What would settle it
If human-verified response timings on new live video streams show no improvement or actual worsening in the adapted models' timing decisions compared with the original offline versions, the central claim would be falsified.
Figures








read the original abstract
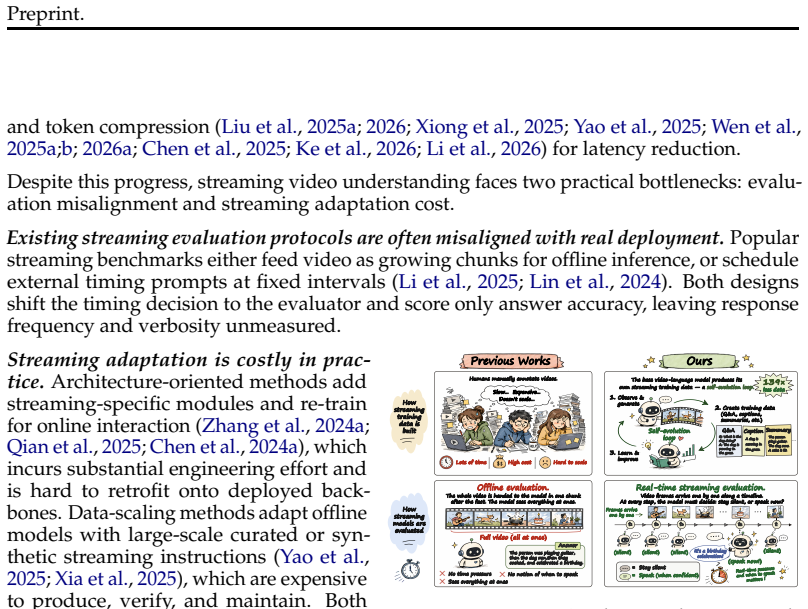
Streaming video understanding demands more than watching longer videos: assistants must decide when to speak in real time, balancing responsiveness against verbosity. Yet most video-language models (VideoLLMs) are trained for offline inference, and existing streaming benchmarks externalize this timing decision to the evaluator. We address this gap with RealStreamEval, a frame-level multi-turn evaluation protocol that exposes models to sequential observations and penalizes unnecessary responses. Under this protocol, we observed that strong offline VideoLLMs retain useful visual understanding but lack an interaction policy for deciding when to respond. Motivated by this observation, we propose EvoStreaming, a self-evolved streaming adaptation framework in which the base model itself acts as data generator, relevance annotator, and roll-out policy to synthesize streaming trajectories without external supervision. With only $1{,}000$ self-generated samples ($139\times$ less than the leading streaming instruction-tuning approach) and no architectural changes, EvoStreaming consistently improves the overall RealStreamEval score by up to $10.8$ points across five open VideoLLM backbones (Qwen2/2.5/3-VL, InternVL-3.5, MiniCPM-V4.5) while largely preserving offline video performance. These results suggest that data-efficient interaction tuning is a practical path for adapting existing VideoLLMs to streaming assistants.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces RealStreamEval, a frame-level multi-turn evaluation protocol for streaming video understanding that exposes models to sequential frame observations and penalizes unnecessary responses, and EvoStreaming, a self-evolved adaptation framework in which the base VideoLLM serves as data generator, relevance annotator, and roll-out policy to synthesize streaming trajectories without external supervision. The central claim is that fine-tuning on only 1,000 such self-generated samples (139× fewer than prior streaming instruction-tuning methods) and without architectural changes yields up to 10.8-point gains on RealStreamEval across five open VideoLLM backbones (Qwen2/2.5/3-VL, InternVL-3.5, MiniCPM-V4.5) while largely preserving offline video performance.
Significance. If the gains prove robust, the work demonstrates a practical route for data-efficient interaction tuning of existing VideoLLMs into streaming assistants. Strengths include the small data regime, preservation of offline capabilities, evaluation on multiple diverse backbones, and the shift to an internalized timing decision in the benchmark. These elements could encourage further exploration of self-supervised policy learning for interactive multimodal models.
major comments (2)
- [EvoStreaming framework and data synthesis] The data-generation procedure (described as the base model acting simultaneously as generator, annotator, and policy): because the abstract states that strong offline VideoLLMs lack an interaction policy for deciding when to respond, the 1,000 self-generated trajectories, relevance annotations, and roll-out policies are produced by a model without the very capability being learned. This is load-bearing for the 10.8-point claim; without external validation (human checks, held-out annotations, or comparison to supervised trajectories), measured improvements could reflect better self-imitation of the model's initial suboptimal timing rather than acquisition of a genuinely improved policy.
- [Experiments] Experiments section: the reported gains are presented as consistent across five backbones, yet no standard deviations, multiple random seeds, or statistical significance tests are mentioned for the RealStreamEval scores. Given that both the training signal and the new evaluation protocol are introduced in the same work, this omission makes it difficult to assess whether the maximum 10.8-point improvement is stable or sensitive to data-generation choices.
minor comments (2)
- [Abstract] The '139× less' comparison in the abstract would be clearer with an explicit citation or footnote stating the sample count of the leading streaming instruction-tuning baseline being referenced.
- [Results tables/figures] Figure or table captions that display per-backbone RealStreamEval scores should include the offline video performance numbers side-by-side to make the 'largely preserving' claim immediately verifiable.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed review. The comments raise important points about the self-evolution mechanism and experimental robustness. We address each major comment below with clarifications and indicate where revisions will be made.
read point-by-point responses
-
Referee: [EvoStreaming framework and data synthesis] The data-generation procedure (described as the base model acting simultaneously as generator, annotator, and policy): because the abstract states that strong offline VideoLLMs lack an interaction policy for deciding when to respond, the 1,000 self-generated trajectories, relevance annotations, and roll-out policies are produced by a model without the very capability being learned. This is load-bearing for the 10.8-point claim; without external validation (human checks, held-out annotations, or comparison to supervised trajectories), measured improvements could reflect better self-imitation of the model's initial suboptimal timing rather than acquisition of a genuinely improved policy.
Authors: We appreciate the referee's careful reading of the tension between the base model's limitations and its role in data synthesis. While the abstract notes that offline VideoLLMs lack a dedicated streaming interaction policy, these models still encode substantial visual-linguistic knowledge that can be elicited via prompting to produce candidate responses and timing decisions. EvoStreaming exploits this by having the model generate diverse trajectories, annotate relevance, and select roll-outs that improve the balance between responsiveness and verbosity. The resulting fine-tuning signal is therefore not pure self-imitation of the original policy; the 10.8-point gains on RealStreamEval, achieved while largely preserving offline performance across five distinct backbones, indicate that the synthesized data teaches a more effective timing strategy. To make this argument more transparent, we will add a dedicated paragraph in the method section explaining the prompting strategy used for policy roll-out and include qualitative examples contrasting base-model and EvoStreaming timing decisions on the same video streams. revision: partial
-
Referee: [Experiments] Experiments section: the reported gains are presented as consistent across five backbones, yet no standard deviations, multiple random seeds, or statistical significance tests are mentioned for the RealStreamEval scores. Given that both the training signal and the new evaluation protocol are introduced in the same work, this omission makes it difficult to assess whether the maximum 10.8-point improvement is stable or sensitive to data-generation choices.
Authors: We agree that the absence of variability measures and statistical tests limits the strength of the empirical claims. In the revised manuscript we will rerun the data-generation and fine-tuning pipelines with at least three random seeds for each backbone, report mean and standard deviation on RealStreamEval, and add paired statistical significance tests (with p-values) between base and EvoStreaming models. These additions will directly address concerns about stability and sensitivity to data-generation choices. revision: yes
Circularity Check
Self-evolution derives training trajectories, annotations, and roll-out policies from the base model itself, so measured gains on RealStreamEval may reduce to better mimicry of the model's initial outputs
specific steps
-
self definitional
[Abstract]
"we propose EvoStreaming, a self-evolved streaming adaptation framework in which the base model itself acts as data generator, relevance annotator, and roll-out policy to synthesize streaming trajectories without external supervision. With only 1,000 self-generated samples (139× less than the leading streaming instruction-tuning approach) and no architectural changes, EvoStreaming consistently improves the overall RealStreamEval score by up to 10.8 points across five open VideoLLM backbones"
The interaction policy being improved is trained exclusively on trajectories, annotations, and roll-out decisions produced by the identical base model that the abstract states 'lack[s] an interaction policy for deciding when to respond.' The measured improvement is therefore generated from the model's own initial outputs rather than from any external source of correct timing behavior.
full rationale
The paper's central derivation is: offline VideoLLMs lack an interaction policy (observed under RealStreamEval) → EvoStreaming lets the same base model generate its own 1,000 streaming trajectories, relevance annotations, and roll-out policies without external supervision → fine-tune the model on this self-data → report up to 10.8-point RealStreamEval gains while preserving offline performance. This chain is partially circular because the data-generation step (which supplies the only training signal) is performed by the identical model whose policy deficiencies are being corrected; no independent oracle, human validation, or external dataset breaks the loop. RealStreamEval is an independent benchmark and therefore supplies partial grounding, but it does not falsify the possibility that the fine-tuned policy simply learns to reproduce the base model's own (suboptimal) timing decisions more consistently. The 139× data-efficiency claim and the 'no architectural changes' statement do not alter the self-referential nature of the training signal.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of self-generated samples =
1000
axioms (1)
- domain assumption The base VideoLLM can generate high-quality streaming trajectories and accurate relevance annotations without external supervision.
invented entities (2)
-
RealStreamEval
no independent evidence
-
EvoStreaming
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
EvoStreaming... lets the base model itself act as data generator, relevance annotator, and roll-out policy to synthesize streaming trajectories... With only 1,000 self-generated samples... improves the overall RealStreamEval score by up to 10.8 points
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat induction and embed_strictMono unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
RealStreamEval... frame-level multi-turn evaluation protocol that exposes models to sequential observations and penalizes unnecessary responses
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Strong-encoder regime.When the base model is a competent VideoLLM on the target domain, ϵV is small and the noise-inflation factor 1/(1 − 2ϵV)2 stays close to 1, so a small budget n≈ 103 already activates the timing policy. This matches the consistent gains we observe across Qwen2/2.5/3-VL, InternVL-3.5, and MiniCPM-V4.5 in Table 2
-
[2]
Weak-encoder regime.As ϵV → 1/2 (e.g., medical or industrial video that is far from the encoder’s pretraining distribution), the noise-inflation factor diverges and self-evolution must be paired with external supervision before becoming effective. This is consistent with the limitations we discuss in Section C.3, and is, to our knowledge, the first quanti...
work page 2023
-
[3]
Analyze the sample captions and identify which question has the most relevant YES evidence across segments
-
[4]
Prefer questions with concrete, observable information rather than ambiguous or N/A evidence
-
[5]
For Temporal Aggregation, prefer repeated actions with count information; for Dynamic Event Description, prefer step-by-step processes; for Anticipatory Monitoring, prefer changing states or reveal chains. Output format.Return JSON with selected question idx, an initial task prompt for track- ing that question, and a briefreasoningfield. Table 14: Prompt ...
-
[6]
Focus only on annotation lines corresponding to the tracked question
-
[7]
Check the last response to avoid repeating information already reported
-
[8]
Decide whether there is enough new evidence to produce an update; otherwise return SILENT
-
[9]
Balance responsiveness and sparsity: avoid spamming, but do not stay silent if the user would miss a key count, step transition, or reveal by waiting. Task-specific response rule. • Temporal Aggregation (TA):respond when one or more new repetitions are completed, maintaining the running count from the last response. • Dynamic Event Description (DED):respo...
-
[10]
Carefully compare the model’s answer with the ground truth answer
-
[11]
Determine if the model’s answer is correct
-
[12]
For multiple choice questions, check if the model selected the correct option (either by letter or by content)
-
[13]
For open-ended questions, check if the model’s answer captures the same meaning as the ground truth. Respond with a JSON object in exactly this format: { ”correct”: true or false, ”reasoning”: ”Brief explanation of your judgment”} Only output the JSON object, nothing else. F.2 Repetition Detection Judge for Penalty This prompt is used to implement the rep...
-
[14]
Analyze the Context provided above
-
[15]
Determine if the agent repeats the answer to the question multiple times unnecessar- ily within this context
- [16]
-
[17]
If the agent answers once and then stays silent or moves to the next topic, it is NOT repeated. Respond with a JSON object in exactly this format: { ”is repeated”: true or false, ”reasoning”: ”Why you think it is repeated or not”} Only output the JSON object. Table 17: Prompt template used to determine whether a CRR output contains a substantive response ...
-
[18]
Evaluate how well the model’s response matches the expected answer
-
[19]
Respond with ONLY a score between 0.0 and 0.5, where: • 0.5 = Good match with minor differences • 0.3 = Related but somewhat differences • 0.0 = Completely wrong or irrelevant Only output the numerical score. F .4.2 LLM Accuracy Judge Prompt for SSR T ask Table 20 shows the SSR stage consistency judge used for Forward Active Responding. Table 20: Prompt t...
-
[20]
Respond with ONLY a score between 0.0 and 0.5, where: • 0.5 = Perfect stage match, fully consistent • 0.2 = Wrong stage but somewhat related activity • 0.0 = Completely wrong stage or irrelevant Only output the numerical score. F .4.3 LLM Accuracy Judge Prompt for REC T ask Table 21 shows the REC count consistency judge used for Forward Active Responding....
work page 2023
-
[21]
Determine if the model correctly reports that the activity has occurred {expected count}time(s)
-
[22]
Respond with ONLY a score between 0.0 and 0.5, where: • 0.5 = Count is explicitly correct • 0.3 = Count is approximately correct (off by 1) • 0.0 = No count mentioned or completely wrong Only output the numerical score. determines whether a candidate response matches the expected answer within the protocol- defined temporal context, and whether repeated r...
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.