Recognition: 2 theorem links
· Lean TheoremEnergy-Efficient Quadruped Locomotion with Compliant Feet
Pith reviewed 2026-05-15 02:16 UTC · model grok-4.3
The pith
Quadruped robots save about 17% energy with intermediate foot compliance versus rigid or overly soft feet.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
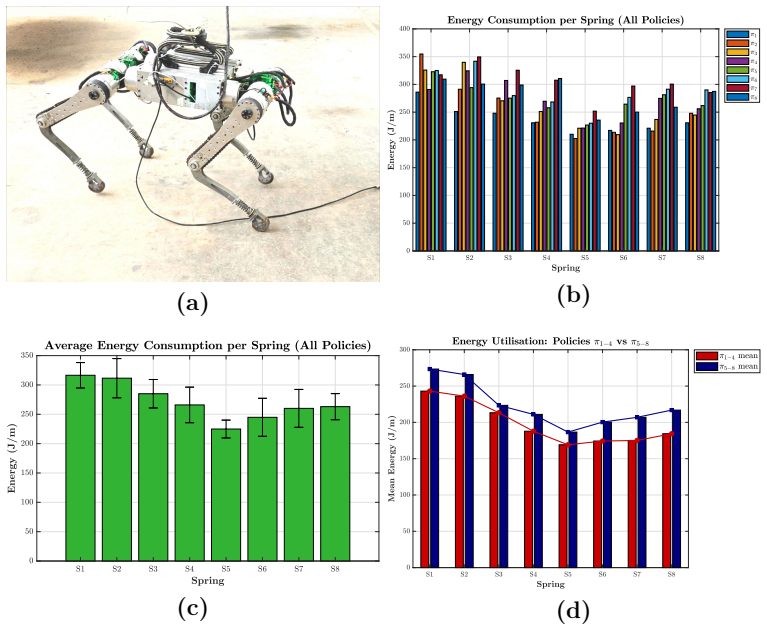
Integrating compliant feet modeled as linear springs into a quadruped robot and training reinforcement learning policies for different stiffness values shows that an intermediate stiffness reduces mechanical energy consumption per distance traveled by approximately 17% in hardware experiments compared to very high or very low stiffness, with matching trends in simulation.
What carries the argument
Variable-stiffness spring-based compliant feet integrated with a reinforcement learning locomotion controller, where the spring handles impact absorption and energy storage during stance phases.
Load-bearing premise
The reinforcement learning policies trained separately for each stiffness value produce locomotion gaits that are similar enough for the energy differences to be caused primarily by the foot compliance rather than by differences in the chosen movements.
What would settle it
Running the same fixed gait trajectory on the robot across all stiffness levels and checking whether the intermediate stiffness still consumes significantly less energy.
Figures






read the original abstract
Quadruped robots are often designed with rigid feet to simplify control and maintain stable contact during locomotion. While this approach is straightforward, it limits the ability of the legs to absorb impact forces and reuse stored elastic energy, leading to higher energy expenditure during locomotion. To explore whether compliant feet can provide an advantage, we integrate foot compliance into a reinforcement learning (RL) locomotion controller and study its effect on walking efficiency. In simulation, we train eight policies corresponding to eight different spring stiffness values and then cross-evaluate their performance by measuring mechanical energy consumed per meter traveled. In experiments done on a developed quadruped, the energy consumption for the intermediate stiffness spring is lower by ~ 17% when compared to a very stiff or a very flexible spring incorporated in the feet, with similar trends appearing in the simulation results. These results indicate that selecting an appropriate foot compliance can improve locomotion efficiency without destabilizing the robot during motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript investigates the impact of foot compliance on energy efficiency in quadruped robot locomotion. It integrates variable-stiffness springs into the feet of a developed quadruped and trains separate reinforcement learning policies for eight different spring stiffness values. Cross-evaluation in simulation and hardware experiments shows that an intermediate stiffness yields approximately 17% lower mechanical energy consumption per meter traveled compared to very stiff or very flexible configurations, with similar trends in both domains, suggesting that appropriate foot compliance can improve efficiency without destabilizing locomotion.
Significance. If the energy savings can be cleanly attributed to the passive mechanical effects of the compliant feet, the work would offer useful empirical guidance for designing energy-efficient legged robots by tuning foot stiffness. The hardware validation on a physical quadruped and the consistent simulation-to-hardware trends are strengths that would support broader adoption of compliant feet in RL-based controllers.
major comments (1)
- [Abstract and Experimental Results] The central empirical claim (abstract and results) rests on cross-evaluating eight independently trained RL policies, one per stiffness value, and reporting ~17% lower energy per meter for the intermediate stiffness. Without gait-similarity metrics (stride length, duty factor, step height, or velocity tracking) or cross-stiffness policy transfer experiments, the measured difference cannot be unambiguously attributed to foot compliance rather than controller-specific gait adaptations. This is load-bearing for the paper's attribution of savings to mechanical compliance.
minor comments (2)
- [Methods] The manuscript provides no details on RL training hyperparameters, the precise energy measurement protocol on hardware, or statistical significance testing for the reported 17% difference, limiting reproducibility.
- [Figures and Notation] Notation for mechanical energy per meter and spring stiffness values should be defined consistently in the text and figures to avoid ambiguity when comparing simulation and hardware results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The major comment raises a valid point about strengthening the attribution of energy savings to foot compliance, and we have revised the paper to incorporate additional analyses addressing this concern.
read point-by-point responses
-
Referee: [Abstract and Experimental Results] The central empirical claim (abstract and results) rests on cross-evaluating eight independently trained RL policies, one per stiffness value, and reporting ~17% lower energy per meter for the intermediate stiffness. Without gait-similarity metrics (stride length, duty factor, step height, or velocity tracking) or cross-stiffness policy transfer experiments, the measured difference cannot be unambiguously attributed to foot compliance rather than controller-specific gait adaptations. This is load-bearing for the paper's attribution of savings to mechanical compliance.
Authors: We agree that gait-similarity metrics and cross-stiffness policy transfer experiments would provide clearer evidence that the observed energy reductions stem primarily from the passive mechanical effects of tuned compliance. In the revised manuscript we have added these elements: quantitative comparisons of stride length, duty factor, step height, and velocity tracking error across all eight policies (showing relative differences below 8% in each metric), and results from cross-stiffness transfer trials in which each policy is evaluated on the other seven stiffness settings. These transfer experiments confirm that the intermediate-stiffness configuration still produces the lowest energy consumption even under non-matched policies. The added data support the original attribution while acknowledging that controller adaptation contributes to the measured differences. revision: yes
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
In simulation, we train eight policies corresponding to eight different spring stiffness values and then cross-evaluate their performance by measuring mechanical energy consumed per meter traveled. ... the energy consumption for the intermediate stiffness spring is lower by ~17%
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We design a physical foot compliance mechanism combined with a reinforcement learning-based locomotion controller
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Y. Fan, Z. Pei, C. Wang, M. Li, Z. Tang, Q. Liu, A review of quadruped robots: Structure, control, and autonomous motion, Advanced Intelli- gent Systems 6 (6) (2024) 2300783
work page 2024
-
[2]
T. Miki, J. Hwangbo, L. Wellhausen, V. Koltun, M. Hutter, Learning robust perceptive locomotion for quadrupedal robots in the wild, Science Robotics 7 (2022). doi:10.1126/scirobotics.abk2822
-
[3]
S. Seok, A. Wang, M. Y. Chuah, D. Otten, J. Lang, S. Kim, Design principles for highly efficient quadrupeds and implementation on the mit cheetah robot, in: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2013, pp. 3307–3312
work page 2013
-
[4]
C. Gehring, P. Fankhauser, L. Isler, R. Diethelm, S. Bachmann, M. Potz, L. Gerstenberg, M. Hutter, Anymal in the field: Solving industrial in- spection of an offshore hvdc platform with a quadrupedal robot, in: Field and Service Robotics: Results of the 12th International Confer- ence, Springer, 2021, pp. 247–260
work page 2021
-
[5]
B. Ghinoiu, L. Vldreanu, A. Pop, V. Vldreanu, R. I. Munteanu, L. Sang, J. Niu, O. Melinte, M. Rdulescu, From cobot to dog intelligent robot go2 and humanoid intelligent robots g1/h1: Educational and economic applications, in: International Conference on Innovation of Emerging Information and Communication Technology, Springer Nature Switzer- land, 2024, p...
work page 2024
-
[6]
Z. Yan, H. Ji, Q. Chang, Energy consumption minimization of quadruped robot based on reinforcement learning of ddpg algorithm, Actuators (2024). doi:10.3390/act13010018
-
[7]
K. Yang, X. Rong, L. Zhou, Y. Li, Modeling and analysis on energy con- sumption of hydraulic quadruped robot for optimal trot motion control, Applied Sciences (2019). doi:10.3390/app9091771. 23
-
[8]
R. Kurazume, B. W. An, K. Ohta, T. Hasegawa, Experimental study on energy efficiency for quadruped walking vehicles, in: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vol. 1, IEEE, 2003, pp. 613–618
work page 2003
- [9]
-
[11]
M. Ishikawa, P. Komi, M. Grey, V. Lepola, G. Brugge- mann, Muscle-tendon interaction and elastic energy usage in hu- man walking., Journal of Applied Physiology 99 2 (2005) 603–8. doi:10.1152/japplphysiol.00189.2005
-
[12]
A. Blazevich, J. Fletcher, More than energy cost: multiple benefits of the long achilles tendon in human walking and running, Biological Reviews 98 (2022). doi:10.1111/brv.13002
- [13]
- [14]
-
[15]
G. Li, R. Zhang, D. Han, H. Pang, G. Yu, Q. Cao, C. Wang, L. Kong, W. Chengjin, W. Dong, T. Li, J. Li, Forelimb joints contribute to loco- motor performance in reindeer (rangifer tarandus) by maintaining sta- bility and storing energy, PeerJ 8 (2020). doi:10.7717/peerj.10278
-
[16]
N. Kashiri, A. Abate, S. J. Abram, A. Albu-Schaffer, P. J. Clary, M. Da- ley, S. Faraji, R. Furnemont, M. Garabini, H. Geyer, A. M. Grabowski, An overview on principles for energy efficient robot locomotion, Fron- tiers in Robotics and AI 5 (2018) 129. 24
work page 2018
-
[17]
S. Seok, A. Wang, M. Y. M. Chuah, D. J. Hyun, J. Lee, D. Otten, J. Lang, S. Kim, Design principles for energy-efficient legged locomotion and implementation on the mit cheetah robot, IEEE/ASME Transactions on Mechatronics 20 (2015) 1117–1129. doi:10.1109/TMECH.2014.2339013
-
[18]
T. J. K. Buchner, T. Fukushima, A. Kazemipour, S.-D. Gravert, M. Prairie, P. Romanescu, P. Arm, Y. Zhang, X. Wang, S. L. Zhang, J. R. Walter, C. Keplinger, R. K. Katzschmann, Electrohydraulic muscu- loskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion, Nature Communications 15 (2024). doi:10.1038/s41467-024-51568-3
-
[19]
Y. Gu, Z. Wang, S. Feng, H. Sun, H. Lu, J. Pan, F. Wan, C. Song, Computational design towards energy efficient optimization in overcon- strained robotic limbs, Journal of Computational Design and Engineer- ing 10 (2023) 1941–1956. doi:10.1093/jcde/qwad083
-
[20]
Y. Zhuang, Y. Wang, Y. Ding, Kinodynamic model predictive con- trol for energy efficient locomotion of legged robots with parallel elasticity, in: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2025, pp. 12365–12371. doi:10.1109/ICRA55743.2025.11128416
-
[21]
J. J. Rond, M. C. Cardani, M. Campbell, J. Hurst, Mitigating peak impact forces by customizing the passive foot dynamics of legged robots, Journal of Mechanisms and Robotics 12 (2019). doi:10.1115/1.4046834
-
[22]
J. J. Rond, M. C. Cardani, M. Campbell, J. Hurst, Eliminating peak impact forces by customizing the passive foot dynamics of legged robots, in: Proceedings of the ASME International Design Engineering Techni- cal Conferences and Computers and Information in Engineering Confer- ence, 2019. doi:10.1115/DETC2019-97484
-
[23]
R. Riddick, D. Farris, L. Kelly, The foot is more than a spring: hu- man foot muscles perform work to adapt to the energetic require- ments of locomotion, Journal of the Royal Society Interface 16 (2019). doi:10.1098/rsif.2018.0680
-
[24]
H. A. Quraishi, M. K. Shepherd, L. McManus, J. Harlaar, D. Pletten- burg, E. J. Rouse, A passive mechanism for decoupling energy storage 25 and return in ankle–foot prostheses: A case study in recycling collision energy, Wearable Technologies 2 (2021). doi:10.1017/wtc.2021.7
-
[25]
B. Liang, L. Sun, X. Zhu, B. Zhang, Z. Xiong, C. Li, K. Sreenath, M. Tomizuka, Adaptive energy regularization for autonomous gait tran- sition and energy-efficient quadruped locomotion, in: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2024, pp. 5350–5356. doi:10.1109/ICRA55743.2025.11128812
-
[26]
P. Kormushev, B. Ugurlu, D. Caldwell, N. Tsagarakis, Learning to exploit passive compliance for energy-efficient gait generation on a compliant humanoid, Autonomous Robots 43 (2018) 79–95. doi:10.1007/s10514-018-9697-6
-
[27]
A. Spröwitz, A. Tuleu, M. Vespignani, M. Ajallooeian, E. Badri, A. Ijspeert, Towards dynamic trot gait locomotion: Design, control, and experiments with cheetah-cub, a compliant quadruped robot, The International Journal of Robotics Research 32 (2013) 932–950
work page 2013
-
[28]
Y. Sun, C. Zong, F. Pancheri, T. Chen, T. C. Lueth, Design of topology optimized compliant legs for bio-inspired quadruped robots, Scientific Reports 13 (1) (2023) 4875
work page 2023
- [29]
-
[30]
J. Luo, S. Ye, J. Su, B. Jin, Prismatic quasi-direct-drives for dynamic quadruped locomotion with high payload capacity, International Journal of Mechanical Sciences 235 (2022) 107698
work page 2022
-
[31]
H. Zong, J. Zhang, L. Jiang, K. Zhang, J. Shen, Z. Lu, K. Wang, Y. Wang, B. Xu, Bionic lightweight design of limb leg units for hydraulic quadruped robots by additive manufacturing and topology optimization, Bio-Design and Manufacturing 7 (2023) 1–13
work page 2023
-
[32]
H. S. Sucuoğlu, Development of topologically optimized mobile robotic system with machine learning-based energy-efficient path planning structure, Machines 13 (8) (2025) 638. 26
work page 2025
-
[33]
E. A. Parra Ricaurte, J. Pareja, S. Domínguez, C. Rossi, Comparison of leg dynamic models for quadrupedal robots with compliant backbone, Scientific Reports 12 (2022) 18536
work page 2022
- [34]
-
[35]
J. Ding, P. Posthoorn, V. Atanassov, F. Boekel, J. Kober, C. Della Santina, Quadrupedal locomotion with parallel compliance: E- go design, modeling, and control, IEEE/ASME Transactions on Mecha- tronics 29 (4) (2024) 2839–2848
work page 2024
-
[36]
D. Lakatos, K. Ploeger, F. Loeffl, D. Seidel, F. Schmidt, T. Gumpert, F. John, T. Bertram, A. Albu-Schäffer, Dynamic locomotion gaits of a compliantly actuated quadruped with slip-like articulated legs embodied in the mechanical design, IEEE Robotics and Automation Letters 3 (2018) 3908–3915
work page 2018
-
[37]
F. Risbourg, T. Corbères, P. A. Léziart, T. Flayols, N. Mansard, S. Ton- neau, Real-time footstep planning and control of the solo quadruped robot in 3d environments, in: Proceedings of the IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), IEEE, 2022, pp. 12950–12956
work page 2022
-
[38]
M. H. Raibert, H. B. Brown Jr, M. Chepponis, Experiments in balance with a 3d one-legged hopping machine, The International Journal of Robotics Research 3 (2) (1984) 75–92
work page 1984
-
[39]
F. Farshidian, M. Neunert, A. W. Winkler, G. Rey, J. Buchli, An effi- cient optimal planning and control framework for quadrupedal locomo- tion, in: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2017, pp. 93–100
work page 2017
-
[40]
O. Cebe, C. Tiseo, G. Xin, H. C. Lin, J. Smith, M. Mistry, Online dynamic trajectory optimization and control for a quadruped robot, in: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2021, pp. 12773–12779
work page 2021
-
[41]
C. Gehring, C. D. Bellicoso, P. Fankhauser, S. Coros, M. Hutter, Quadrupedal locomotion using trajectory optimization and hierarchical 27 whole body control, in: Proceedings of the IEEE International Confer- ence on Robotics and Automation (ICRA), IEEE, 2017, pp. 4788–4794
work page 2017
-
[42]
Q. Li, L. Qian, S. Wang, P. Sun, X. Luo, Towards generation and transition of diverse gaits for quadrupedal robots based on trajectory optimization and whole-body impedance control, IEEE Robotics and Automation Letters 8 (4) (2023) 2389–2396
work page 2023
-
[43]
J. Humphreys, J. Li, Y. Wan, H. Gao, C. Zhou, Bio-inspired gait transi- tions for quadruped locomotion, IEEE Robotics and Automation Letters 8 (10) (2023) 6131–6138
work page 2023
-
[44]
J. Park, J. H. Park, Impedance control of quadruped robot and its impedance characteristic modulation for trotting on irregular terrain, in: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2012, pp. 175–180
work page 2012
-
[45]
H. Xie, M. Ahmadi, J. Shang, Z. Luo, An intuitive approach for quadruped robot trotting based on virtual model control, Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering 229 (4) (2015) 342–355
work page 2015
-
[46]
T. Boaventura, J. Buchli, C. Semini, D. G. Caldwell, Model-based hy- draulic impedance control for dynamic robots, IEEE Transactions on Robotics 31 (6) (2015) 1324–1336
work page 2015
- [47]
-
[48]
M. Neunert, M. Stäuble, M. Giftthaler, C. D. Bellicoso, J. Carius, C. Gehring, M. Hutter, J. Buchli, Whole-body nonlinear model pre- dictive control through contacts for quadrupeds, IEEE Robotics and Automation Letters 3 (3) (2018) 1458–1465
work page 2018
-
[49]
A. Pinosky, I. Abraham, A. Broad, B. Argall, T. D. Murphey, Hybrid control for combining model-based and model-free reinforcement learn- ing, The International Journal of Robotics Research 42 (6) (2023) 337– 355. 28
work page 2023
- [50]
-
[51]
G. B. Margolis, P. Agrawal, Walk these ways: Tuning robot control for generalization with multiplicity of behavior, in: Conference on Robot Learning (CoRL), PMLR, 2023, pp. 22–31
work page 2023
-
[52]
J. E. McKenzie, Design of robotic quadruped legs, Master’s thesis, Mas- sachusetts Institute of Technology, Cambridge, MA, USA (2012). URL https://dspace.mit.edu/handle/1721.1/70444
work page 2012
-
[53]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V. Makoviychuk, L. Wawrzyniak, Y. Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa, G. State, Isaac gym: High performance gpu-based physics simulation for robot learning, arXiv preprint arXiv:2108.10470 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
- [54]
-
[55]
Open Robotics, Ros 2 humble hawksbill, https://docs.ros.org/en/ humble/, accessed: 2026-03-20 (2022). 29
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.