Exploitation of Hidden Context in Dynamic Movement Forecasting: A Neural Network Journey from Recurrent to Graph Neural Networks and General Purpose Transformers
Pith reviewed 2026-06-30 21:22 UTC · model grok-4.3
The pith
A context-augmented LSTM achieves the lowest final displacement error of 1.51 meters when forecasting NBA player trajectories, outperforming graph attention networks and transformers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
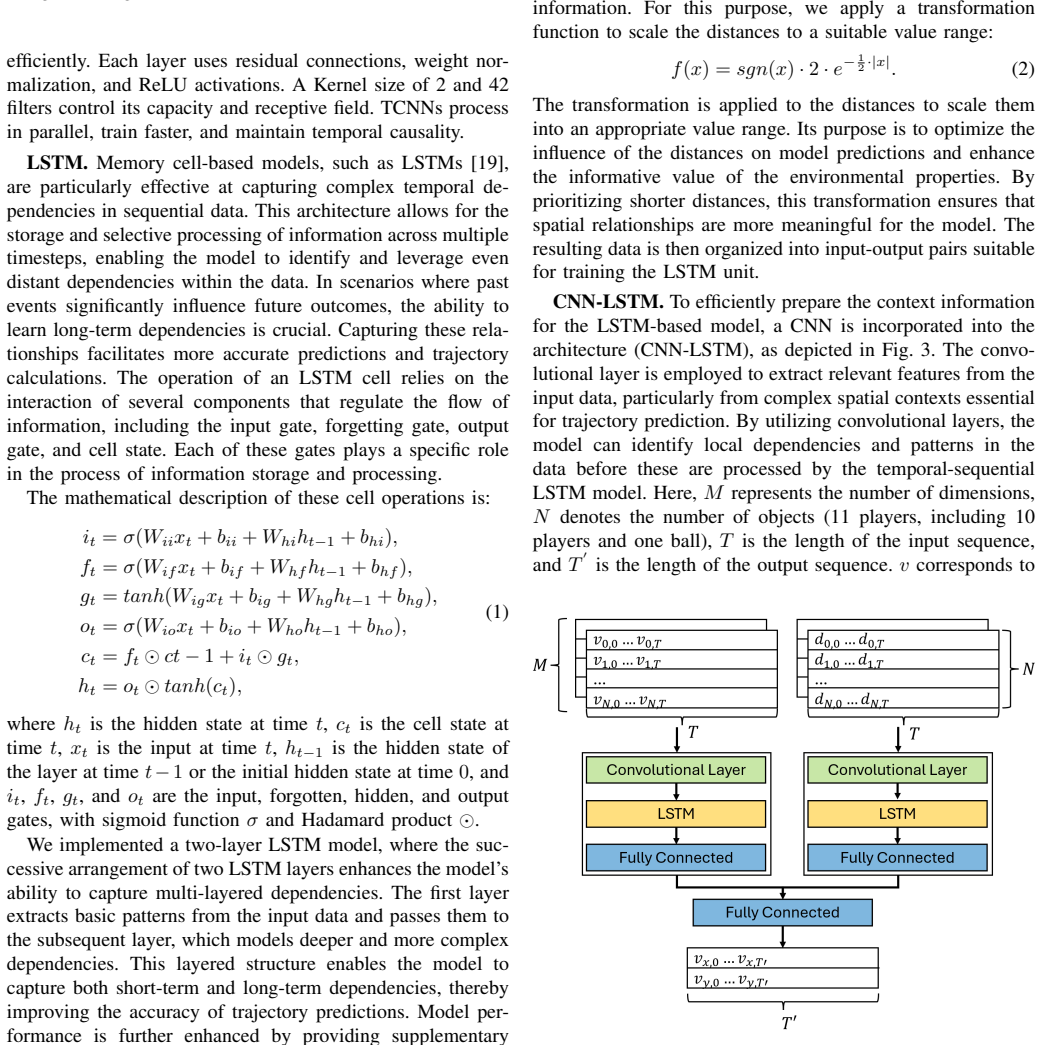
When forecasting NBA player trajectories, a hybrid LSTM that receives both temporal history and contextual information attains a final displacement error of 1.51 m. This result is lower than the errors produced by a temporal convolutional network, a graph attention network, and a transformer, while the same LSTM also requires less data and training time than the graph and transformer models.
What carries the argument
Hybrid LSTM augmented with contextual information, which combines recurrent temporal modeling with explicit side features that describe player interactions and game state.
If this is right
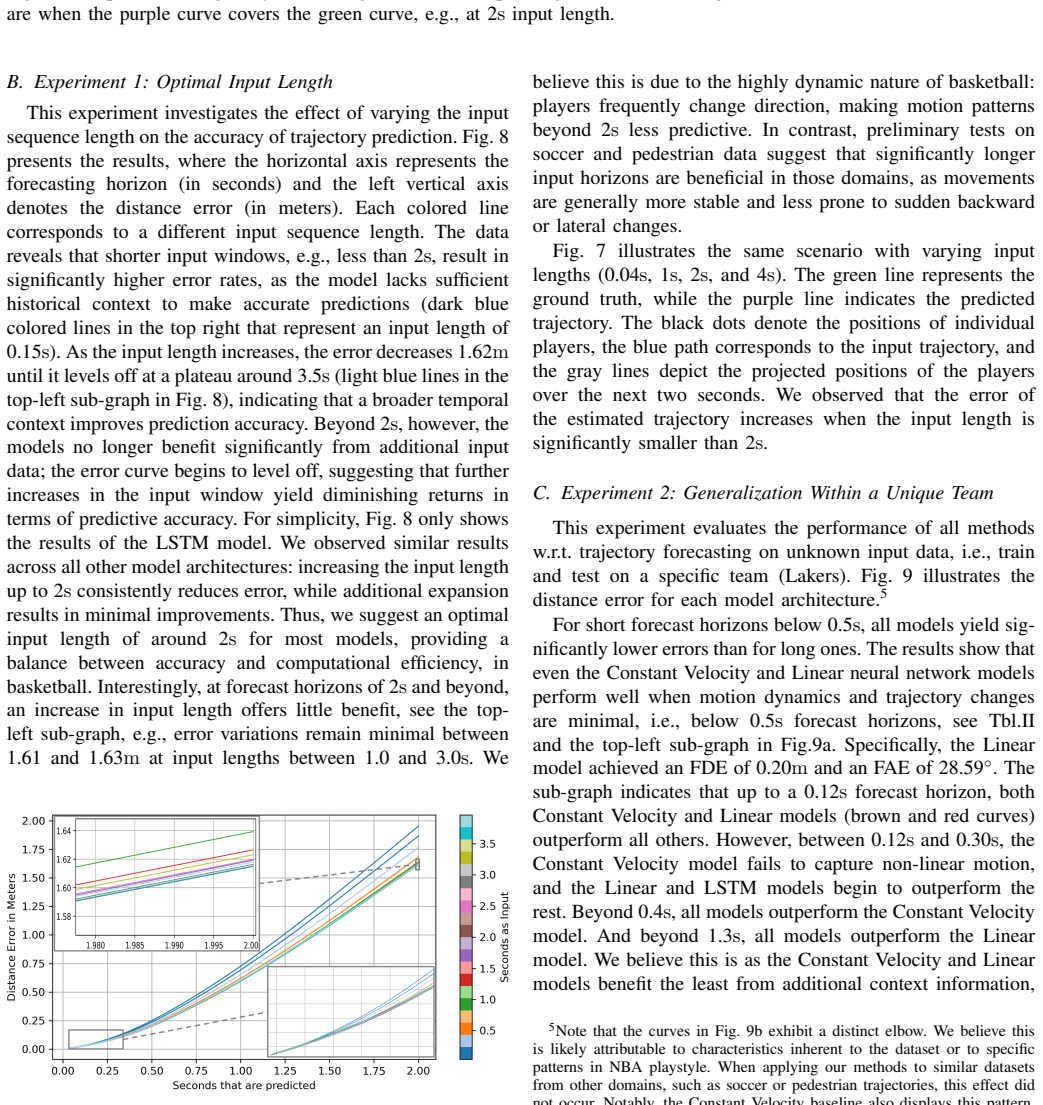
- Machine-learning models produce substantially lower errors than linear methods for prediction horizons up to two seconds.
- Adding contextual features to an LSTM yields the smallest final displacement error among the tested networks.
- The context-augmented LSTM uses less training data and wall-clock time than graph attention or transformer alternatives.
- No single architecture wins on every metric of accuracy, generalizability, and computational cost.
Where Pith is reading between the lines
- The performance edge of the context-augmented LSTM implies that explicit interaction features can substitute for the more expensive relational layers used in graph or attention models.
- The same modeling pattern may transfer to other multi-agent forecasting settings where state descriptors are already available, such as traffic or pedestrian flows.
- Task-specific tuning of history length and context richness appears more decisive than the choice of base architecture.
Load-bearing premise
The NBA player trajectory dataset together with its supplied contextual features stands in for the chaotic, interactive dynamics that would appear in real-world deployment.
What would settle it
Retraining and testing the same four architectures on a different multi-agent trajectory corpus, such as soccer match data, and checking whether the 1.51 m FDE advantage and resource ranking persist.
Figures


read the original abstract
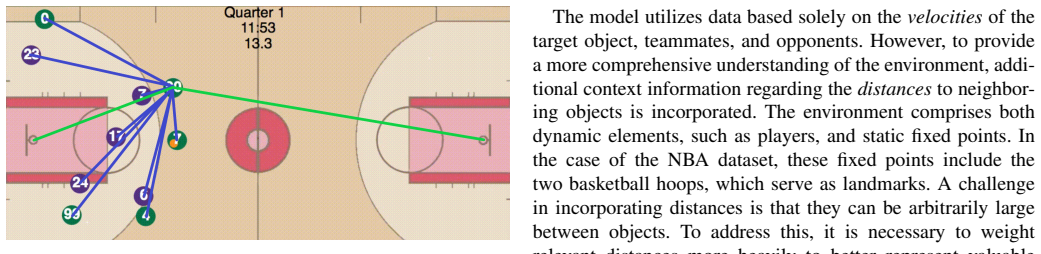
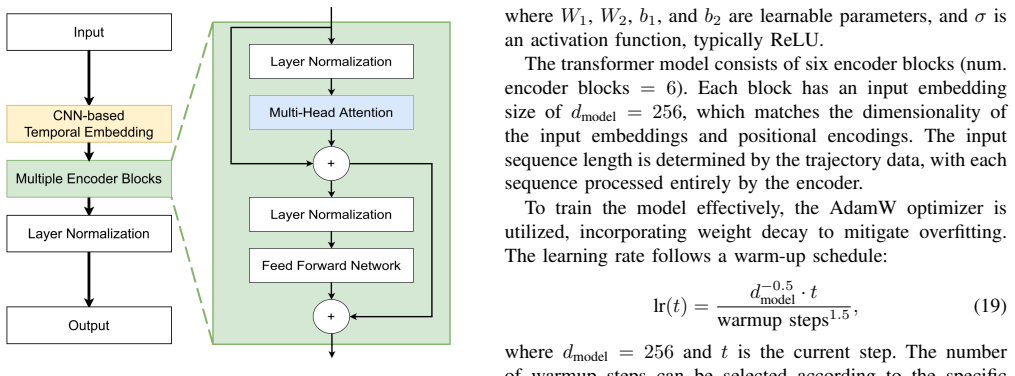
Forecasting within signal processing pipelines is crucial for mitigating delays, particularly in predicting the dynamic movements of objects such as NBA players. This task poses significant challenges due to the inherently interactive and unpredictable nature of sports, where abrupt changes in velocity and direction are prevalent. Traditional approaches, including (S)ARIMA(X), Kalman filters (KF), and Particle filters (PF), often struggle to model the non-linear dynamics present in such scenarios. Machine learning (ML) methods, such as long short-term memory (LSTM) networks, graph neural networks (GNNs), and Transformers, offer greater flexibility and accuracy but frequently fail to explicitly capture the interplay between temporal dependencies and contextual interactions, which are critical in chaotic sports environments. In this paper, we evaluate these models and assess their strengths and weaknesses. Experimental results reveal key performance trade-offs across input history length, generalizability, and the ability to incorporate contextual information. ML-based methods demonstrated substantial improvements over linear models across forecast horizons of up to 2s. Among the tested architectures, our hybrid LSTM augmented with contextual information achieved the lowest final displacement error (FDE) of 1.51m, outperforming temporal convolutional neural network (TCNN), graph attention network (GAT), and Transformers, while also requiring less data and training time compared to GAT and Transformers. Our findings indicate that no single architecture excels across all metrics, emphasizing the need for task-specific considerations in trajectory prediction for fast-paced, dynamic environments such as NBA gameplay.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript conducts an empirical benchmark of machine learning models (LSTM variants, TCNN, GAT, Transformers) for forecasting NBA player trajectories up to 2s horizons. It reports that a hybrid LSTM augmented with contextual information achieves the lowest FDE of 1.51m, outperforms the other architectures, and requires less data and training time than GAT and Transformers, while highlighting performance trade-offs across input history length and generalizability.
Significance. If the reported performance differences hold under rigorous verification, the work provides concrete evidence that task-specific incorporation of contextual features can improve trajectory forecasting in interactive dynamic settings and that architecture choice involves explicit trade-offs in accuracy, data efficiency, and compute; the concrete FDE numbers and qualitative comparisons constitute a useful reference point for similar signal-processing applications.
major comments (2)
- [performance comparison section] Performance comparison section: the central claim that the hybrid LSTM achieves the lowest FDE of 1.51m and outperforms TCNN, GAT, and Transformers is presented without error bars, statistical significance tests, details on train/validation/test splits, or hyperparameter selection protocol, rendering the quantitative outperformance unverifiable from the reported results.
- [Abstract and performance comparison section] Abstract and performance comparison section: the claim that results generalize to chaotic, interactive dynamics rests on the NBA dataset and its contextual features being representative, yet no quantitative characterization of dataset variability (e.g., statistics on abrupt velocity changes or multi-agent interaction density) or comparison against other trajectory corpora is supplied to support this assumption.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's comments. We address each major comment below and indicate the revisions we plan to make to the manuscript.
read point-by-point responses
-
Referee: [performance comparison section] Performance comparison section: the central claim that the hybrid LSTM achieves the lowest FDE of 1.51m and outperforms TCNN, GAT, and Transformers is presented without error bars, statistical significance tests, details on train/validation/test splits, or hyperparameter selection protocol, rendering the quantitative outperformance unverifiable from the reported results.
Authors: We agree that the absence of error bars, statistical tests, split details, and hyperparameter protocol limits the verifiability of the results. The reported FDE of 1.51m is from our primary experimental run, but to address this, we will conduct additional experiments with multiple seeds to report means and standard deviations, perform statistical significance tests, and include a detailed description of the train/validation/test splits (e.g., chronological split to avoid leakage) and the hyperparameter search protocol in the revised manuscript. revision: yes
-
Referee: [Abstract and performance comparison section] Abstract and performance comparison section: the claim that results generalize to chaotic, interactive dynamics rests on the NBA dataset and its contextual features being representative, yet no quantitative characterization of dataset variability (e.g., statistics on abrupt velocity changes or multi-agent interaction density) or comparison against other trajectory corpora is supplied to support this assumption.
Authors: The manuscript positions the NBA dataset as an exemplar of chaotic, interactive dynamics based on its established use in trajectory forecasting literature for sports. However, we acknowledge the lack of explicit quantitative characterization and cross-corpus comparison in the current version. In the revision, we will add a dataset analysis section providing statistics on velocity changes and interaction density, and discuss the generalizability to other domains with appropriate caveats. revision: yes
Circularity Check
No circularity: purely empirical benchmark study
full rationale
The paper is an empirical comparison of LSTM, TCNN, GAT, and Transformer models on NBA trajectory data, reporting measured FDE values such as 1.51m for the hybrid LSTM. No equations, derivations, fitted parameters renamed as predictions, or self-citation chains appear in the abstract or described content. All performance claims rest on direct experimental outcomes rather than any reduction to inputs by construction. The dataset representativeness assumption is external to any derivation and does not trigger the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Guest editorial: Special issue on sports analytics,
U. Brefeld and A. Zimmermann, “Guest editorial: Special issue on sports analytics,” inData Mining and Knowledge Discovery Jo., vol. 31, no. 7, 2017, pp. 1577–1579
2017
-
[2]
Stock Market Prediction via Deep Learning Techniques: A Survey,
J. Zou, Q. Zhao, Y . Jiao, H. Cao, Y . Liu, Q. Yan, E. Abbasnejad, L. Liu, and J. Q. Shi, “Stock Market Prediction via Deep Learning Techniques: A Survey,” 2023
2023
-
[3]
Forecasting Economics and Financial Time Series: ARIMA vs. LSTM
S. Siami-Namini and A. S. Namin, “Forecasting Economics and Finan- cial Time Series: ARIMA vs. LSTM,” inarXiv:1803.06386 [cs.CV], 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[4]
Joint Classification and Trajectory Regression of Online Handwriting using a Multi-Task Learning Approach,
F. Ott, D. R ¨ugamer, L. Heublein, B. Bischl, and C. Mutschler, “Joint Classification and Trajectory Regression of Online Handwriting using a Multi-Task Learning Approach,” inProc. IEEE Conf. Winter Conf. on Applications of Computer Vision (WACV), Waikoloa, HI, 2022
2022
-
[5]
Forecasting of Electricity Prices Using Deep Learning Networks,
W. Zhang, F. Cheema, and D. Srinivasan, “Forecasting of Electricity Prices Using Deep Learning Networks,” inAsia Pacific Power and Energy Engineering Conf. (APPEEC), 2018, pp. 451–456
2018
-
[6]
A Review on Weather Forecasting Techniques,
G. Jain and S. Singh, “A Review on Weather Forecasting Techniques,” inIJARCCE, vol. 5, 2016, pp. 177–180
2016
-
[7]
ViPR: Visual-Odometry- aided Pose Regression for 6DoF Camera Localization,
F. Ott, T. Feigl, C. L ¨offler, and C. Mutschler, “ViPR: Visual-Odometry- aided Pose Regression for 6DoF Camera Localization,” inProc. of the IEEE/CVF Intl. Conf. on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, W A, 2020, pp. 187–198
2020
-
[8]
Fusing Structure from Motion and Simulation-Augmented Pose Regression from Optical Flow for Challenging Indoor Environments,
F. Ott, L. Heublein, D. R ¨ugamer, B. Bischl, and C. Mutschler, “Fusing Structure from Motion and Simulation-Augmented Pose Regression from Optical Flow for Challenging Indoor Environments,” inJo. Visual Communication and Image Representation (JVCIR), vol. 104256, 2024
2024
-
[9]
Sports Analytics and the Big- data Era,
E. Morgulev, O. H. Azar, and R. Lidor, “Sports Analytics and the Big- data Era,” inIntl. Jo. Data Science and Analytics, vol. 5, no. 1, 2018, pp. 213–222
2018
-
[10]
One-match-ahead Forecasting in Two-team Sports with Stacked Bayesian Regressions,
M. W. Lam, “One-match-ahead Forecasting in Two-team Sports with Stacked Bayesian Regressions,” inJo. Artificial Intelligence and Soft Computing Research, vol. 8, no. 3, 2018, pp. 159–171
2018
-
[11]
Daten-getriebene Methoden zur Bestimmung von Position und Orientierung in Funk- und Tr ¨agheits-basierter Koppelnavigation,
T. Feigl, “Daten-getriebene Methoden zur Bestimmung von Position und Orientierung in Funk- und Tr ¨agheits-basierter Koppelnavigation,” Ph.D. dissertation, FAU Erlangen-N ¨urnberg, 2021
2021
-
[12]
Rethinking Trajectory Prediction via Team Game,
Z. Wei, X. Zhu, B. Dai, and D. Lin, “Rethinking Trajectory Prediction via Team Game,” inarXiv:2210.08793 [cs.CV], 2022, pp. 1–13
-
[13]
Stochastic trajectory prediction with social graph network
L. Zhang, Q. She, and P. Guo, “Stochastic Trajectory Prediction with Social Graph Network,” inarXiv:1907.10233 [cs.CV], 2019, pp. 1–12
work page internal anchor Pith review Pith/arXiv arXiv 1907
-
[14]
Hybrid Basketball Game Outcome Prediction Model by Integrating Data Mining Methods for the National Basketball Association,
W.-J. Chen, M.-J. Jhou, T.-S. Lee, and C.-J. Lu, “Hybrid Basketball Game Outcome Prediction Model by Integrating Data Mining Methods for the National Basketball Association,” inEntropy Jo., vol. 23, no. 477, 2021, pp. 1–17
2021
-
[15]
Ans ¨atze zur Verbesserung KI-basierter Systeme f¨ur das autonome Fahren,
D. Br ¨uggemann, S. Bracke, H. Gottschalk, M. Rottmann, K. Maag, R. Chan, and M. Schubert, “Ans ¨atze zur Verbesserung KI-basierter Systeme f¨ur das autonome Fahren,” inQualit ¨atsmanagement in den 20er Jahren - Trends und Perspektiven, B. Leyendecker, Ed., 2021, pp. 100– 119
2021
-
[16]
An Introduction to the Kalman Filter,
G. Welch and G. Bishop, “An Introduction to the Kalman Filter,” University of North Carolina at Chapel Hill, USA, Tech. Rep., 1995
1995
-
[17]
Particle Filtering,
P. Djuric, J. Kotecha, J. Zhang, Y . Huang, T. Ghirmai, M. Bugallo, and J. Miguez, “Particle Filtering,” inIEEE Signal Processing Magazine, vol. 20, no. 5, 2003, pp. 19–38
2003
-
[18]
Machine Learning Predictive Analytics for Player Movement Prediction in NBA: Applications, Opportunities, and Challenges,
D. K. Stephanos, G. Husari, B. T. Bennett, and E. Stephanos, “Machine Learning Predictive Analytics for Player Movement Prediction in NBA: Applications, Opportunities, and Challenges,” inProc. Intl. Conf. ACM Southeast (ACM SE), 2021, pp. 2–8
2021
-
[19]
Understanding LSTM – a tutorial into Long Short-Term Memory Recurrent Neural Networks,
R. C. Staudemeyer and E. R. Morris, “Understanding LSTM – a tutorial into Long Short-Term Memory Recurrent Neural Networks,” inarXiv:1909.09586 [cs.CV], 2019, pp. 1–32
-
[20]
Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling
J. Chung, C. Gulcehre, K. Cho, and Y . Bengio, “Empirical Evalua- tion of Gated Recurrent Neural Networks on Sequence Modeling,” in arXiv:1412.3555 [cs.NE], 2014, pp. 1–9
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[21]
Legendre Memory Units: Continuous-Time Representation in Recurrent Neural Networks,
A. V oelker, I. Kaji ´c, and C. Eliasmith, “Legendre Memory Units: Continuous-Time Representation in Recurrent Neural Networks,” in Proc. of Conf. Advances in Neural Information Processing Systems (NIPS), 2019, pp. 15 544–15 553
2019
-
[22]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, L. Kaiser, and I. Polosukhin, “Attention Is All You Need,” in arXiv:1706.03762 [cs.CV], 8 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[23]
A Comprehensive Survey on Graph Neural Networks,
Z. Wu, S. Pan, F. Chen, G. Long, C. Zhang, and S. Y . Philip, “A Comprehensive Survey on Graph Neural Networks,” inIEEE Trans. on Neural Networks and Learning Systems, vol. 32, no. 1. IEEE, 2020
2020
-
[24]
Con- necting the dots: Multivariate time series forecasting with graph neural networks,
Z. Wu, S. Pan, G. Long, J. Jiang, X. Chang, and C. Zhang, “Con- necting the dots: Multivariate time series forecasting with graph neural networks,” inProc. Intl. conf. on knowledge discovery and data mining (KDD), 2020, pp. 753–763
2020
-
[25]
Adaptive Trajectory Prediction via Transferable GNN,
Y . Xu, L. Wang, Y . Wang, and Y . Fu, “Adaptive Trajectory Prediction via Transferable GNN,” inProc. of the IEEE/CVF Intl. Conf. on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 6520–6531
2022
-
[26]
The graph neural network model,
Scarselli, Franco and Gori, Marco and Tsoi, Ah Chung and Hagen- buchner, Markus and Monfardini, Gabriele, “The graph neural network model,” inIEEE Trans. on Neural Networks, vol. 20, no. 1, 2009, pp. 61–80
2009
-
[27]
Graph neural network for traffic forecasting: A survey,
W. Jiang and J. Luo, “Graph neural network for traffic forecasting: A survey,” inExpert Systems with Applications, vol. 207, 2022, p. 117921
2022
-
[28]
Graph and Recurrent Neural Network-based Vehicle Trajectory Prediction for Highway Driving,
X. Mo, Y . Xing, and C. Lv, “Graph and Recurrent Neural Network-based Vehicle Trajectory Prediction for Highway Driving,” inProc. Intl. Conf. IEEE Intelligent Transportation Systems Conf. (ITSC), 2021, pp. 1934– 1939
2021
-
[29]
Graph attention networks,
P. Velickovic, G. Cucurull, A. Casanova, A. Romero, P. Lio, Y . Bengio et al., “Graph attention networks,” instat, vol. 1050, no. 20, 2017
2017
-
[30]
A spatio-temporal transformer for 3d human motion prediction,
E. Aksan, M. Kaufmann, P. Cao, and O. Hilliges, “A spatio-temporal transformer for 3d human motion prediction,” in3DV, 2021, pp. 565– 574
2021
-
[31]
BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding
J. Devlin, M.-W. Chang, K. Lee, and K. Toutanova, “BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding,” in arXiv:1810.04805 [cs.CV], 2019
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[32]
End-to- end object detection with transformers,
N. Carion, F. Massa, G. Synnaeve, R. Cadene, and C. Schmid, “End-to- end object detection with transformers,” inEuropean Conf. on Computer Vision (ECCV), 2020
2020
-
[33]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, and B. Schiele, “An image is worth 16x16 words: Transformers for image recognition at scale,” inarXiv:2010.11929 [cs.CV], 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[34]
Social LSTM: Human Trajectory Prediction in Crowded Spaces,
A. Alahi, K. Goel, V . Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese, “Social LSTM: Human Trajectory Prediction in Crowded Spaces,” inProc. Intl. Conf. IEEE Computer Vision and Pattern Recog- nition (CVPR), 2016, pp. 961–971
2016
-
[35]
Social-stgcnn: A Social Spatio-temporal Graph Convolutional Neural Network for Human Trajectory Prediction,
A. Mohamed, K. Qian, M. Elhoseiny, and C. Claudel, “Social-stgcnn: A Social Spatio-temporal Graph Convolutional Neural Network for Human Trajectory Prediction,” inProc. Intl. Conf. IEEE Computer Vision and Pattern Recognition (CVPR), 2020, pp. 14 424–14 432
2020
-
[36]
arXiv preprint arXiv:1907.07792 (2019)
X. Li, X. Ying, and M. C. Chuah, “Grip++: Enhanced Graph-based Interaction-aware Trajectory Prediction for Autonomous Driving,” in arXiv:1907.07792 [cs.CV], 2019, pp. 1–16
-
[37]
Goodfellow, Y
I. Goodfellow, Y . Bengio, and A. Courville,Convolutional Networks. MIT Press, 2016
2016
-
[38]
Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions,
L. Alzubaidi, J. Zhang, A. Humaidi, A. Al-Dujaili, Y . Duan, O. Al- Shamma, J. Santamar ´ıa, M. Fadhel, M. Al-Amidie, and L. Farhan, “Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions,” inJo. of Big Data, vol. 8, no. 2, 2021, pp. 1–74
2021
-
[39]
Structured prediction helps 3d human motion modelling,
Aksan, Emre and Kaufmann, Manuel and Hilliges, Otmar, “Structured prediction helps 3d human motion modelling,” inProc. IEEE Conf. Winter Conf. on Applications of Computer Vision (WACV), 2019, pp. 7144–7153
2019
-
[40]
Convolutional Neural Network for Trajec- tory Prediction,
N. Nikhil and B. T. Morris, “Convolutional Neural Network for Trajec- tory Prediction,” inProc. European Conf. on Computer Vision (ECCV), 2019, pp. 186–196
2019
-
[41]
Long Short-term Memory,
S. Hochreiter and J. Schmidhuber, “Long Short-term Memory,” in Neural Computation Jo., vol. 9, no. 8, 1997, pp. 1735–1780
1997
-
[42]
Transformer Networks for Trajectory Forecasting,
F. Giuliari, I. Hasan, M. Cristani, and F. Galasso, “Transformer Networks for Trajectory Forecasting,” inarXiv:2003.08111 [cs.CV], 2020, pp. 1– 14
-
[43]
Robust Human Motion Forecasting using Transformer-based Model,
E. V . Mascaro, S. Ma, H. Ahn, and D. Lee, “Robust Human Motion Forecasting using Transformer-based Model,” inProc. Intl. Conf. on Intelligent Robots and Systems (IROS), 2022, pp. 10 674–10 680
2022
-
[44]
Interaction-aware Trajectory Prediction of Connected Vehicles Using CNN-LSTM Networks,
X. Mo, Y . Xing, and C. Lv, “Interaction-aware Trajectory Prediction of Connected Vehicles Using CNN-LSTM Networks,” inProc. Intl. Conf. IEEE Industrial Electronics Society (IECON), 2020, pp. 5057–5062
2020
-
[45]
A Holistic and Proactive Approach to Forecasting Cyber Threats,
Z. Almahmoud, P. D. Yoo, O. Alhussein, I. Farhat, and E. Damiani, “A Holistic and Proactive Approach to Forecasting Cyber Threats,” in Nature Scientific Reports Jo., vol. 13, no. 1, 2023, pp. 8049–8061
2023
-
[46]
wav2vec 2.0: A framework for self-supervised learning of speech representations,
A. Baevski, H. Zhou, A. Mohamed, and M. Auli, “wav2vec 2.0: A Framework for Self-Supervised Learning of Speech Representations,” inCoRR, vol. abs/2006.11477, 2020
-
[47]
Temporal convolutional networks for action segmentation and detection,
C. Lea, M. D. Flynn, R. Vidal, A. Reiter, and G. D. Hager, “Temporal convolutional networks for action segmentation and detection,” inProc. Intl. Conf. on Computer Vision and Pattern Recognition (CVPR), 2017, pp. 156–165
2017
-
[48]
Gatraj: A graph-and attention-based multi-agent trajectory prediction model,
H. Cheng, M. Liu, L. Chen, H. Broszio, M. Sester, and M. Y . Yang, “Gatraj: A graph-and attention-based multi-agent trajectory prediction model,”ISPRS JPRS, vol. 205, pp. 163–175, 2023
2023
-
[49]
Linou, D
K. Linou, D. Linou, and M. de Boer. (2016) NBA-Player- Movements Dataset. [Online]. Available: https://github.com/linouk23/ NBA-Player-Movements
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.