LAPS: Improving Incremental LiDAR Mapping using Active Pooling and Sampling for Neural Distance Fields
Pith reviewed 2026-05-19 15:52 UTC · model grok-4.3
The pith
LAPS manages replay buffers with reliability-based pooling and uncertainty sampling to reduce forgetting in incremental neural LiDAR mapping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
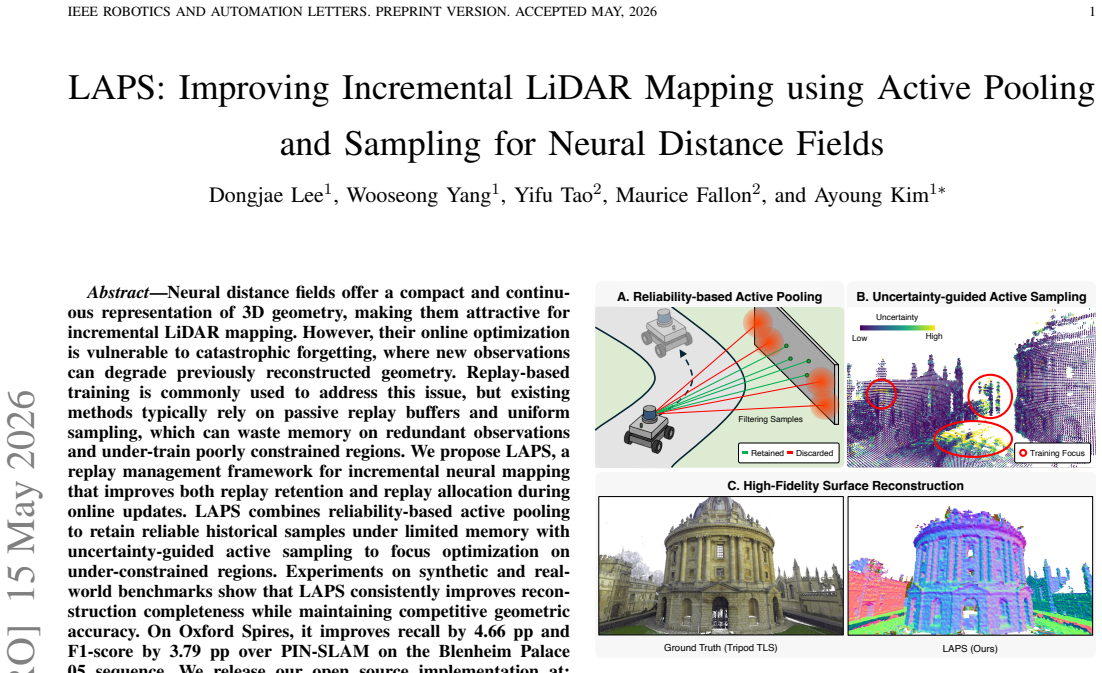
LAPS combines reliability-based active pooling to retain reliable historical samples under limited memory with uncertainty-guided active sampling to focus optimization on under-constrained regions, consistently improving reconstruction completeness while maintaining competitive geometric accuracy.
What carries the argument
The LAPS replay management framework that scores historical points for reliability to decide retention and estimates uncertainty in the neural distance field to guide which new points receive optimization effort.
If this is right
- Reconstruction recall improves by 4.66 percentage points and F1-score by 3.79 points over PIN-SLAM on the Blenheim Palace sequence from Oxford Spires.
- Completeness increases on both synthetic and real-world benchmarks while geometric accuracy stays competitive.
- Memory use for the replay buffer becomes more efficient by discarding low-reliability historical observations.
- Online updates focus computation on poorly constrained areas rather than uniformly sampling the buffer.
Where Pith is reading between the lines
- The same active selection logic could be tested on other continuous representations such as neural radiance fields or Gaussian splats for LiDAR or camera streams.
- If uncertainty estimates remain reliable across sensor modalities, the method might extend to multi-sensor fusion without retraining the selection rules.
- A natural next measurement would compare memory-accuracy curves when the reliability threshold is varied on longer trajectories.
Load-bearing premise
Reliability scores and uncertainty estimates derived from the current neural distance field give unbiased guidance on which samples to keep and which regions to emphasize.
What would settle it
Run LAPS on a dataset where ground-truth geometry is known and deliberately add noise to the uncertainty estimator; if completeness gains disappear or accuracy drops below a uniform-sampling baseline, the claim is refuted.
Figures







read the original abstract
Neural distance fields offer a compact and continuous representation of 3D geometry, making them attractive for incremental LiDAR mapping. However, their online optimization is vulnerable to catastrophic forgetting, where new observations can degrade previously reconstructed geometry. Replay-based training is commonly used to address this issue, but existing methods typically rely on passive replay buffers and uniform sampling, which can waste memory on redundant observations and under-train poorly constrained regions. We propose LAPS, a replay management framework for incremental neural mapping that improves both replay retention and replay allocation during online updates. LAPS combines reliability-based active pooling to retain reliable historical samples under limited memory with uncertainty-guided active sampling to focus optimization on under-constrained regions. Experiments on synthetic and real-world benchmarks show that LAPS consistently improves reconstruction completeness while maintaining competitive geometric accuracy. On Oxford Spires, it improves recall by 4.66 pp and F1-score by 3.79 pp over PIN-SLAM on the Blenheim Palace 05 sequence. We release our open source implementation at: https://github.com/dongjae0107/LAPS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes LAPS, a replay management framework for incremental optimization of neural distance fields in LiDAR mapping. It combines reliability-based active pooling to retain reliable historical samples under limited memory with uncertainty-guided active sampling to prioritize under-constrained regions, aiming to reduce catastrophic forgetting compared to passive uniform replay. Experiments on synthetic and real-world data, including the Oxford Spires dataset, report gains in reconstruction completeness and competitive geometric accuracy, with specific improvements of +4.66 pp recall and +3.79 pp F1-score over PIN-SLAM on the Blenheim Palace 05 sequence. The implementation is released as open source.
Significance. If the central claims hold after addressing validation gaps, LAPS offers a targeted engineering improvement for memory-constrained online NDF mapping in robotics, with potential to enhance completeness without sacrificing accuracy. The open-source release aids reproducibility.
major comments (2)
- [Abstract] Abstract and Experiments: quantitative gains (recall +4.66 pp, F1 +3.79 pp) are stated without reported details on experimental controls, number of runs, statistical significance testing, or precise definitions/computation of completeness and accuracy metrics, which are load-bearing for the empirical claims.
- [Method] Method (active pooling and sampling): reliability scores and uncertainty estimates are derived directly from the evolving neural distance field during incremental updates. This creates a potential self-reinforcing feedback loop in which early optimization errors or under-constrained regions bias the very signals used for sample retention and prioritization, risking systematic distortion of the replay buffer. No decoupling (e.g., frozen estimator, ground-truth proxy, or stability analysis) is described to rule this out.
minor comments (1)
- [Abstract] The GitHub link for the open-source implementation is a strength for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We address each major comment point by point below, indicating the changes we will make in the revised version.
read point-by-point responses
-
Referee: [Abstract] Abstract and Experiments: quantitative gains (recall +4.66 pp, F1 +3.79 pp) are stated without reported details on experimental controls, number of runs, statistical significance testing, or precise definitions/computation of completeness and accuracy metrics, which are load-bearing for the empirical claims.
Authors: We agree that the reported quantitative improvements require fuller experimental context to be properly evaluated. In the revised manuscript we will expand the Experiments section to report the number of independent runs, any measures of variability across runs, the statistical tests applied (if any), and the exact definitions and computation procedures for recall, F1-score, completeness, and geometric accuracy. We will also ensure the abstract claims are appropriately qualified or cross-referenced to these details. revision: yes
-
Referee: [Method] Method (active pooling and sampling): reliability scores and uncertainty estimates are derived directly from the evolving neural distance field during incremental updates. This creates a potential self-reinforcing feedback loop in which early optimization errors or under-constrained regions bias the very signals used for sample retention and prioritization, risking systematic distortion of the replay buffer. No decoupling (e.g., frozen estimator, ground-truth proxy, or stability analysis) is described to rule this out.
Authors: We acknowledge the referee's concern about possible feedback bias in an online setting. Although our reliability and uncertainty signals follow common practice in active replay methods, we will add a new analysis subsection that examines the temporal stability of these scores during incremental mapping and includes an ablation that periodically freezes the estimator used for scoring. This will allow us to quantify and mitigate any systematic distortion of the replay buffer. revision: yes
Circularity Check
No circularity: empirical replay framework validated on external benchmarks
full rationale
The paper describes LAPS as a practical replay-management method combining reliability-based pooling and uncertainty-guided sampling for incremental NDF optimization. All reported gains (e.g., +4.66 pp recall on Oxford Spires) are obtained by direct comparison against independent baselines such as PIN-SLAM on held-out sequences. No equation, prediction, or central claim is shown to reduce by construction to a quantity fitted inside the same run; the reliability and uncertainty signals are used heuristically and their effectiveness is measured externally rather than assumed. The derivation chain is therefore self-contained against external data.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
LAPS combines reliability-based active pooling to retain reliable historical samples under limited memory with uncertainty-guided active sampling to focus optimization on under-constrained regions
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We estimate model uncertainty by approximating the covariance of the posterior p(θ|D) using a Laplace approximation around the maximum a posteriori (MAP) estimate
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
V . Reijgwart, J. Behley, T. Vidal-Calleja, H. Oleynikova, L. Ott, C. Stachniss, and A. Kim, “Dense map representation,” in SLAM Handbook. From Localization and Mapping to Spatial Intelligence, L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, Eds. Cambridge University Press, 2026
work page 2026
-
[2]
Shine-mapping: Large-scale 3d mapping using sparse hierarchical implicit neural representations,
X. Zhong, Y . Pan, J. Behley, and C. Stachniss, “Shine-mapping: Large-scale 3d mapping using sparse hierarchical implicit neural representations,” inIEEE Intl. Conf. on Robotics and Automa- tion, 2023, pp. 8371–8377
work page 2023
-
[3]
Neural geometric level of detail: Real-time rendering with implicit 3d shapes,
T. Takikawa, J. Litalien, K. Yin, K. Kreis, C. Loop, D. Nowrouzezahrai, A. Jacobson, M. McGuire, and S. Fidler, “Neural geometric level of detail: Real-time rendering with implicit 3d shapes,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2021, pp. 11 358–11 367
work page 2021
-
[4]
Instant neural graphics primitives with a multiresolution hash encoding,
T. M ¨uller, A. Evans, C. Schied, and A. Keller, “Instant neural graphics primitives with a multiresolution hash encoding,”ACM Trans. on Graphics (TOG), vol. 41, no. 4, pp. 1–15, 2022
work page 2022
-
[5]
Y . Pan, X. Zhong, L. Wiesmann, T. Posewsky, J. Behley, and C. Stachniss, “Pin-slam: Lidar slam using a point-based implicit neural representation for achieving global map consistency,” IEEE Trans. Robotics, vol. 40, pp. 4045–4064, 2024
work page 2024
-
[6]
isdf: Real-time neural signed distance fields for robot perception,
J. Ortiz, A. Clegg, J. Dong, E. Sucar, D. Novotn `y, M. Zollh¨ofer, and M. Mukadam, “isdf: Real-time neural signed distance fields for robot perception,” inRobotics: Science and Systems (RSS), 2022
work page 2022
-
[7]
N3-mapping: Normal guided neural non-projective signed distance fields for large-scale 3d mapping,
S. Song, J. Zhao, K. Huang, J. Lin, C. Ye, and T. Feng, “N3-mapping: Normal guided neural non-projective signed distance fields for large-scale 3d mapping,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5935–5942, 2024
work page 2024
-
[8]
Real- time 3d reconstruction at scale using voxel hashing,
M. Nießner, M. Zollh ¨ofer, S. Izadi, and M. Stamminger, “Real- time 3d reconstruction at scale using voxel hashing,”ACM Trans. on Graphics (TOG), vol. 32, no. 6, pp. 1–11, 2013
work page 2013
-
[9]
Octomap: An efficient probabilistic 3d mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “Octomap: An efficient probabilistic 3d mapping framework based on octrees,”Autonomous Robots, vol. 34, no. 3, pp. 189–206, 2013
work page 2013
-
[10]
Vdb- fusion: Flexible and efficient tsdf integration of range sensor data,
I. Vizzo, T. Guadagnino, J. Behley, and C. Stachniss, “Vdb- fusion: Flexible and efficient tsdf integration of range sensor data,”Sensors, vol. 22, no. 3, p. 1296, 2022
work page 2022
-
[11]
imap: Implicit mapping and positioning in real-time,
E. Sucar, S. Liu, J. Ortiz, and A. J. Davison, “imap: Implicit mapping and positioning in real-time,” inIntl. Conf. on Com- puter Vision (ICCV), 2021, pp. 6229–6238
work page 2021
-
[12]
Bayes’ rays: Uncertainty quantification for neural radiance fields,
L. Goli, C. Reading, S. Sell ´an, A. Jacobson, and A. Tagliasacchi, “Bayes’ rays: Uncertainty quantification for neural radiance fields,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 20 061–20 070
work page 2024
-
[13]
SiLVR: Scalable lidar-visual radi- ance field reconstruction with uncertainty quantification,
Y . Tao and M. Fallon, “SiLVR: Scalable lidar-visual radi- ance field reconstruction with uncertainty quantification,”IEEE Trans. Robotics, 2025
work page 2025
-
[14]
Fisherrf: Active view selec- tion and mapping with radiance fields using fisher information,
W. Jiang, B. Lei, and K. Daniilidis, “Fisherrf: Active view selec- tion and mapping with radiance fields using fisher information,” inEuropean Conf. on Computer Vision (ECCV). Springer, 2024, pp. 422–440
work page 2024
-
[15]
Un3-mapping: Uncertainty-aware neural non-projective signed distance fields for 3d mapping,
S. Song, J. Zhao, E. Veas, J. Lin, Q. Cao, C. Ye, and T. Feng, “Un3-mapping: Uncertainty-aware neural non-projective signed distance fields for 3d mapping,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[16]
3d lidar mapping in dynamic environments using a 4d implicit neural representation,
X. Zhong, Y . Pan, C. Stachniss, and J. Behley, “3d lidar mapping in dynamic environments using a 4d implicit neural representation,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 15 417–15 427
work page 2024
-
[17]
Optimized spatial hashing for collision detec- tion of deformable objects
M. Teschner, B. Heidelberger, M. M ¨uller, D. Pomerantes, and M. H. Gross, “Optimized spatial hashing for collision detec- tion of deformable objects.” inVision, Modeling, Visualization (VMV), vol. 3, 2003, pp. 47–54
work page 2003
-
[18]
N. Funk, J. Tarrio, S. Papatheodorou, M. Popovi ´c, P. F. Alcan- tarilla, and S. Leutenegger, “Multi-resolution 3d mapping with explicit free space representation for fast and accurate mobile robot motion planning,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3553–3560, 2021
work page 2021
-
[19]
Nice-slam: Neural implicit scalable encoding for slam,
Z. Zhu, S. Peng, V . Larsson, W. Xu, H. Bao, Z. Cui, M. R. Oswald, and M. Pollefeys, “Nice-slam: Neural implicit scalable encoding for slam,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 12 786–12 796
work page 2022
-
[20]
Laplace redux-effortless bayesian deep learning,
E. Daxberger, A. Kristiadi, A. Immer, R. Eschenhagen, M. Bauer, and P. Hennig, “Laplace redux-effortless bayesian deep learning,”Advances in Neural Information Processing Systems (NeurIPS), vol. 34, pp. 20 089–20 103, 2021
work page 2021
-
[21]
Silvr: Scalable lidar-visual reconstruction with neural radiance fields for robotic inspection,
Y . Tao, Y . Bhalgat, L. F. T. Fu, M. Mattamala, N. Chebrolu, and M. Fallon, “Silvr: Scalable lidar-visual reconstruction with neural radiance fields for robotic inspection,” inIEEE Intl. Conf. on Robotics and Automation, 2024, pp. 17 983–17 989
work page 2024
-
[22]
Poisson surface reconstruction for lidar odometry and map- ping,
I. Vizzo, X. Chen, N. Chebrolu, J. Behley, and C. Stachniss, “Poisson surface reconstruction for lidar odometry and map- ping,” inIEEE Intl. Conf. on Robotics and Automation, 2021, pp. 5624–5630
work page 2021
-
[23]
The newer college dataset: Handheld lidar, inertial and vision with ground truth,
M. Ramezani, Y . Wang, M. Camurri, D. Wisth, M. Mattamala, and M. Fallon, “The newer college dataset: Handheld lidar, inertial and vision with ground truth,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2020, pp. 4353–4360
work page 2020
-
[24]
Open3D: A Modern Library for 3D Data Processing
Q.-Y . Zhou, J. Park, and V . Koltun, “Open3d: A modern library for 3d data processing,”arXiv preprint arXiv:1801.09847, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[25]
V oxfield: Non-projective signed distance fields for online planning and 3d reconstruction,
Y . Pan, Y . Kompis, L. Bartolomei, R. Mascaro, C. Stachniss, and M. Chli, “V oxfield: Non-projective signed distance fields for online planning and 3d reconstruction,” inIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2022, pp. 5331–5338
work page 2022
-
[26]
Y . Tao, M. ´A. Mu ˜noz-Ba˜n´on, L. Zhang, J. Wang, L. F. T. Fu, and M. Fallon, “The oxford spires dataset: Benchmarking large- scale lidar-visual localisation, reconstruction and radiance field methods,”Intl. J. of Robotics Research, 2025
work page 2025
-
[27]
Efficient implementation of marching cubes’ cases with topological guar- antees,
T. Lewiner, H. Lopes, A. W. Vieira, and G. Tavares, “Efficient implementation of marching cubes’ cases with topological guar- antees,”Journal of graphics tools, vol. 8, no. 2, pp. 1–15, 2003
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.