EUPHORIA: Efficient Universal Planning via Hybrid Optimization for Robust Industrial Robotic Assembly
Pith reviewed 2026-05-20 19:57 UTC · model grok-4.3
The pith
EUPHORIA uses graph hypernetworks and physics-biased attention to adapt robotic assembly plans to new complex geometries from few examples without retraining.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
EUPHORIA achieves universal few-shot adaptability and dynamic efficiency through a hybrid optimization strategy. The Meta-Geometric Encoder based on Graph Hypernetworks dynamically generates policy parameters from a minimal support set, enabling parameter-level adaptation to complex topologies without gradient-based retraining. The Physics-Informed Graph Transformer trained via Soft Actor-Critic uses a Physics-Bias Attention mechanism that modulates attention scores with contact forces from Discrete Element Model simulations. Kinematics-Aware Sequencing penalizes high-energy transitions, and Residual Stability Correction fine-tunes coarse actions by minimizing a joint energy-stability cost.
What carries the argument
Meta-Geometric Encoder based on Graph Hypernetworks that dynamically generates policy parameters from a minimal support set for parameter-level adaptation to new topologies.
If this is right
- Energy consumption drops compared with planners that treat sequencing and motion as separate stages.
- Success rates reach state-of-the-art levels on previously unseen non-standard geometries using only minimal few-shot examples.
- New designs can be handled without running gradient updates or collecting large retraining datasets.
- Coarse simulation plans can be corrected on the fly to reduce sim-to-real failures before physical execution.
Where Pith is reading between the lines
- The same hypernetwork-plus-physics-attention pattern could be tested on other contact-rich robotic tasks such as furniture assembly or debris sorting.
- Replacing the discrete-element simulator with faster analytic contact models might trade some accuracy for speed in time-critical settings.
- Collecting the support set on-site from a few manual demonstrations could let the planner adapt to site-specific materials without central retraining.
- Combining the residual correction layer with real-time force sensing might further close the gap when material properties vary from simulation.
Load-bearing premise
The hypernetwork can produce working policy parameters for unseen complex shapes from only a few examples, and contact forces from particle simulations accurately point to the connections that matter for structural integrity.
What would settle it
Testing the system on a novel irregular geometry when the few-shot support set contains only standard shapes and measuring whether assembly success rate falls below that of a fully retrained baseline.
Figures








read the original abstract
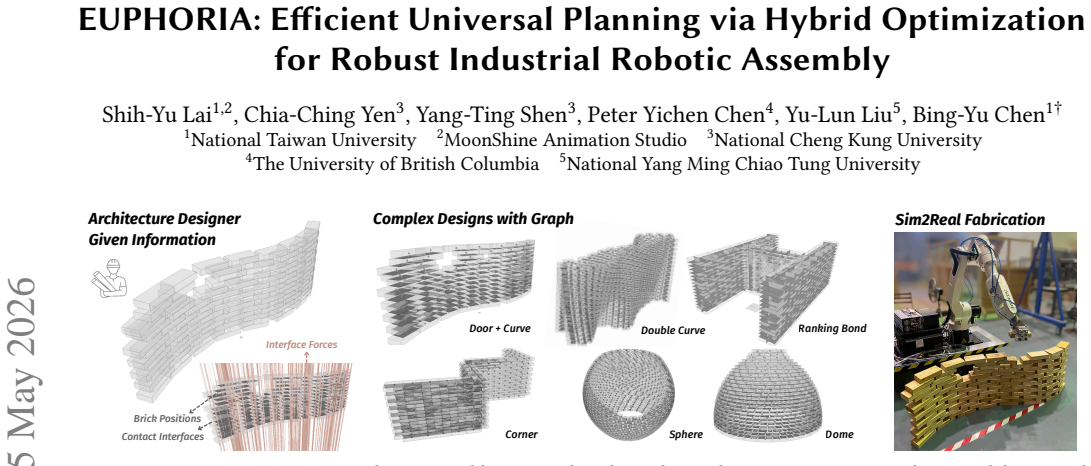
Robotic assembly in architectural construction faces a persistent bottleneck: existing planners are either highly specialized, requiring prohibitive retraining for every new geometric design, or operationally inefficient, treating structural sequencing and kinematic motion as disjoint processes. We present EUPHORIA, a unified framework that achieves universal few-shot adaptability and dynamic efficiency through a hybrid optimization strategy. To overcome the retraining bottleneck, we propose a Meta-Geometric Encoder based on Graph Hypernetworks: unlike standard contrastive learning, which performs only feature-level recognition, our hypernetwork dynamically generates policy parameters from a minimal support set, enabling parameter-level adaptation to complex topologies (e.g., domes, arches) without gradient-based retraining. For structural reasoning, we introduce a Physics-Informed Graph Transformer trained via Soft Actor-Critic (SAC), with a Physics-Bias Attention mechanism that modulates attention scores using contact forces from Discrete Element Model (DEM) simulations, guiding the planner toward structurally critical connections. We further ensure operational efficiency through Kinematics-Aware Sequencing, where the SAC objective penalizes high-energy transitions. Finally, we bridge the Sim2Real gap via Residual Stability Correction, a differentiable optimization layer that fine-tunes coarse assembly actions by minimizing a joint energy-stability cost prior to execution. Experiments show that EUPHORIA significantly reduces energy consumption over decoupled baselines and achieves state-of-the-art success rates on unseen, non-standard geometries with minimal few-shot examples, fusing meta-learning, physics-informed attention, and residual optimization into a cohesive, generalized planner.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes EUPHORIA, a unified framework for robotic assembly planning in architectural construction. It integrates a Meta-Geometric Encoder based on Graph Hypernetworks to dynamically generate policy parameters from a minimal support set for few-shot adaptation to complex topologies without retraining; a Physics-Informed Graph Transformer trained with Soft Actor-Critic that incorporates a Physics-Bias Attention mechanism modulating scores via contact forces from DEM simulations; Kinematics-Aware Sequencing that penalizes high-energy transitions; and a Residual Stability Correction layer for sim-to-real fine-tuning via joint energy-stability optimization. The central claims are universal few-shot adaptability, significant energy reduction over decoupled baselines, and state-of-the-art success rates on unseen non-standard geometries.
Significance. If the empirical claims are substantiated with rigorous quantitative validation, the work could meaningfully advance industrial robotics by addressing the retraining bottleneck and operational inefficiency of existing planners through a hybrid meta-learning and physics-informed optimization approach. The parameter-level adaptation via hypernetworks and the integration of simulation-derived structural priors represent potentially useful directions if the components prove robust beyond the described simulation settings.
major comments (2)
- [Abstract] Abstract: the claims of 'significantly reduces energy consumption over decoupled baselines' and 'state-of-the-art success rates on unseen, non-standard geometries with minimal few-shot examples' are presented without any quantitative results, specific baseline methods, error bars, number of trials, dataset details, or ablation studies. This absence prevents assessment of whether the hybrid strategy delivers the asserted gains in adaptability and efficiency.
- [Physics-Bias Attention mechanism] Physics-Bias Attention mechanism: the mechanism modulates attention scores using contact forces from DEM simulations to identify structurally critical connections. DEM is formulated for granular/particulate media with many-body collisions and flow dynamics, whereas the target domain involves rigid polyhedral parts under precise kinematic constraints and static stability. Without explicit verification that the extracted forces correspond to actual contact normals or torques in the assembly graph, the bias may supply incorrect structural priors, reducing the approach to a standard graph transformer and undermining both the few-shot and energy-reduction claims.
minor comments (2)
- [Meta-Geometric Encoder] Clarify the exact definition and selection procedure for the 'minimal support set size' and 'physics-bias scaling factor', which appear as free parameters whose sensitivity is not discussed.
- [Experiments] Provide the full experimental protocol, including simulation environment details, number of random seeds, and exact comparison methods, to support reproducibility of the reported improvements.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below, indicating where we agree and the specific revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims of 'significantly reduces energy consumption over decoupled baselines' and 'state-of-the-art success rates on unseen, non-standard geometries with minimal few-shot examples' are presented without any quantitative results, specific baseline methods, error bars, number of trials, dataset details, or ablation studies. This absence prevents assessment of whether the hybrid strategy delivers the asserted gains in adaptability and efficiency.
Authors: We agree that the abstract would be improved by including quantitative support for the high-level claims. In the revised version, we will update the abstract to reference specific experimental results, including energy reduction percentages with error bars, success rates on unseen geometries, the decoupled baselines used for comparison, the number of trials, and a brief mention of key ablation findings from the results section. revision: yes
-
Referee: [Physics-Bias Attention mechanism] Physics-Bias Attention mechanism: the mechanism modulates attention scores using contact forces from DEM simulations to identify structurally critical connections. DEM is formulated for granular/particulate media with many-body collisions and flow dynamics, whereas the target domain involves rigid polyhedral parts under precise kinematic constraints and static stability. Without explicit verification that the extracted forces correspond to actual contact normals or torques in the assembly graph, the bias may supply incorrect structural priors, reducing the approach to a standard graph transformer and undermining both the few-shot and energy-reduction claims.
Authors: We acknowledge the referee's valid concern about the applicability of standard DEM formulations to rigid polyhedral assemblies. Our use of DEM is intended to derive approximate contact force magnitudes for biasing attention in the graph transformer toward structurally relevant connections. To address this directly, we will add a new subsection in the methods that explains the adaptation for rigid bodies and includes validation comparing DEM-extracted forces against contact normals and torques from our rigid-body kinematic simulator. This clarification will confirm that the physics bias supplies meaningful priors. revision: partial
Circularity Check
No significant circularity detected
full rationale
The provided manuscript text describes a hybrid framework combining a Meta-Geometric Encoder (Graph Hypernetworks), Physics-Informed Graph Transformer with Physics-Bias Attention (modulated by DEM contact forces), SAC training, Kinematics-Aware Sequencing, and Residual Stability Correction. No equations, derivations, or self-referential definitions are exhibited that reduce a claimed prediction or first-principles result to its own inputs by construction. Claims of few-shot adaptability and energy reduction rest on experimental outcomes rather than tautological fits or load-bearing self-citations, rendering the derivation self-contained against external benchmarks such as success rates on unseen geometries.
Axiom & Free-Parameter Ledger
free parameters (2)
- minimal support set size
- physics-bias scaling factor
axioms (2)
- domain assumption Discrete Element Model simulations produce contact forces that accurately identify structurally critical connections for real-world assembly.
- domain assumption The joint energy-stability cost minimized in the residual layer is a faithful proxy for successful real-robot execution.
invented entities (2)
-
Meta-Geometric Encoder
no independent evidence
-
Physics-Bias Attention mechanism
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Rie Ando and Tong Zhang. 2006. Learning on graph with Laplacian regularization. Advances in neural information processing systems19 (2006)
work page 2006
-
[2]
Haritsa, Kevin Han, and John-Paul Ore
Khashayar Asadi, Varun R. Haritsa, Kevin Han, and John-Paul Ore. 2021. Au- tomated Object Manipulation Using Vision-Based Mobile Robotic System for Construction Applications.Journal of Computing in Civil Engineering35, 1 (2021), 04020058. https://doi.org/10.1061/(ASCE)CP.1943-5487.0000946
-
[3]
Matan Atad, Jianxiang Feng, Ismael Rodr’iguez, Maximilian Durner, and Rudolph Triebel. 2023. Efficient and Feasible Robotic Assembly Sequence Planning via Graph Representation Learning.2023 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS)(2023), 8262–8269. https://api.semanticscholar. org/CorpusID:257623086
work page 2023
-
[4]
2021.Siamese Neural Networks: An Overview
Davide Chicco. 2021.Siamese Neural Networks: An Overview. Springer US, New York, NY, 73–94. https://doi.org/10.1007/978-1-0716-0826-5_3
-
[5]
H. Chung, J. Kim, B. Knyazev, J. Lee, G. Taylor, J. Park, and M. Cho. 2021. Brick- by-Brick: Combinatorial construction with deep reinforcement learning.arXiv preprint(Oct. 2021). https://doi.org/10.48550/arXiv.2110.15481
-
[6]
Jimmy Envall, Roi Poranne, and Stelian Coros. 2023. Differentiable Task Assign- ment and Motion Planning. In2023 IEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS). 2049–2056. https://doi.org/10.1109/IROS55552. 2023.10341602
-
[7]
Chelsea Finn, Pieter Abbeel, and Sergey Levine. 2017. Model-Agnostic Meta- Learning for Fast Adaptation of Deep Networks. InProceedings of the 34th In- ternational Conference on Machine Learning (Proceedings of Machine Learning Research, Vol. 70), Doina Precup and Yee Whye Teh (Eds.). PMLR, 1126–1135. https://proceedings.mlr.press/v70/finn17a.html
work page 2017
-
[8]
Niklas Funk, Georgia Chalvatzaki, Boris Belousov, and Jan Peters. 2022. Learn2assemble with structured representations and search for robotic architec- tural construction. InConference on Robot Learning. PMLR, 1401–1411
work page 2022
-
[9]
Niklas Funk, Svenja Menzenbach, Georgia Chalvatzaki, and Jan Peters. 2022. Graph-based Reinforcement Learning meets Mixed Integer Programs: An appli- cation to 3D robot assembly discovery. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 10215–10222. https://doi.org/10.1109/ IROS47612.2022.9981784
-
[10]
K. Ghasemipour, D. Freeman, B. David, S. Gu, S. Kataoka, and I. Mordatch. 2022. Blocks Assemble! Learning to assemble with large-scale structured reinforcement learning.arXiv preprint(Mar. 2022). https://doi.org/10.48550/arXiv.2203.13733
-
[11]
Andrew Goldberg, Kavish Kondap, Tianshuang Qiu, Zehan Ma, Letian Fu, Justin Kerr, Huang Huang, Kaiyuan Chen, Kuan Fang, and Ken Goldberg. 2025. Blox- Net: Generative Design-for-Robot-Assembly using VLM supervision, Physics, Simulation, and a Robot with Reset. In2025 International Conference on Robotics and Automation (ICRA). IEEE
work page 2025
-
[12]
Udesh Gunarathna, Renata Borovica-Gajic, Shanika Karunasekera, and Ege- men Tanin. 2022. Dynamic graph combinatorial optimization with multi- attention deep reinforcement learning. InProceedings of the 30th Interna- tional Conference on Advances in Geographic Information Systems(<conf-loc>, <city>Seattle</city>, <state>Washington</state>, </conf-loc>)(SIG...
-
[13]
Shengnan Guo, Youfang Lin, Ning Feng, Chao Song, and Huaiyu Wan. 2019. Attention Based Spatial-Temporal Graph Convolutional Networks for Traffic Flow Forecasting.Proceedings of the AAAI Conference on Artificial Intelligence 33, 01 (Jul. 2019), 922–929. https://doi.org/10.1609/aaai.v33i01.3301922
-
[14]
Hamilton, Rex Ying, and Jure Leskovec
William L. Hamilton, Rex Ying, and Jure Leskovec. 2017. Inductive representation learning on large graphs. InProceedings of the 31st International Conference on Neural Information Processing Systems(Long Beach, California, USA)(NIPS’17). Curran Associates Inc., Red Hook, NY, USA, 1025–1035
work page 2017
-
[15]
J. Hamrick, K. Allen, V. Bapst, T. Zhu, K. McKee, J. Tenenbaum, and P. Battaglia
-
[16]
Relational inductive bias for physical construction in humans and machines
Relational inductive bias for physical construction in humans and machines. arXiv preprint(Jun. 2018). https://doi.org/10.48550/arXiv.1806.01203
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1806.01203 2018
-
[17]
Hartmann, Andreas Orthey, Danny Driess, Ozgur S
Valentin N. Hartmann, Andreas Orthey, Danny Driess, Ozgur S. Oguz, and Marc Toussaint. 2023. Long-Horizon Multi-Robot Rearrangement Planning for Construction Assembly.IEEE Transactions on Robotics39, 1 (2023), 239–252. https://doi.org/10.1109/TRO.2022.3198020
-
[18]
Masatoshi Hatano, Mamoru Minami, Toshiyuki Asakura, and Tsuyoshi Ohsumi
-
[19]
Construction Robot Systems Using Mobile Manipulators - Piling up Blocks with Real Systems and Positioning Accuracy. InProceedings of the 16th IAARC/IFAC/IEEE International Symposium on Automation and Robotics in Construction, Carlos Balaguer (Ed.). International Association for Automa- tion and Robotics in Construction (IAARC), Madrid, Spain, 549–554. htt...
-
[20]
Wenlong Huang, Hao Su, et al. 2023. Differentiable Visual Learning for Physics- Based Motion Estimation. InAdvances in Neural Information Processing Systems (NeurIPS). https://openreview.net/forum?id=ecRaDicXxw
work page 2023
-
[21]
Yijiang Huang, Pok Yin Victor Leung, Caelan Garrett, Fabio Gramazio, Matthias Kohler, and Caitlin Mueller. 2021. The new analog: A protocol for linking design and construction intent with algorithmic planning for robotic assembly of complex structures(SCF ’21). Association for Computing Machinery, New York, NY, USA, Article 9, 17 pages. https://doi.org/10...
-
[22]
Wei Jin, Yao Ma, Xiaorui Liu, Xianfeng Tang, Suhang Wang, and Jiliang Tang. 2020. Graph Structure Learning for Robust Graph Neural Networks. InProceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining(Virtual Event, CA, USA)(KDD ’20). Association for Computing Machinery, New York, NY, USA, 66–74. https://doi.org/10.1...
-
[23]
Parnian Kassraie, Andreas Krause, and Ilija Bogunovic. 2022. Graph Neural Network Bandits. InAdvances in Neural Information Processing Systems, Alice H. Oh, Alekh Agarwal, Danielle Belgrave, and Kyunghyun Cho (Eds.). https: //openreview.net/forum?id=BWa5IUE3L4
work page 2022
-
[24]
Thomas Kipf and Max Welling. 2016. Semi-Supervised Classification with Graph Convolutional Networks. (09 2016)
work page 2016
-
[25]
Manav Kulshrestha and Ahmed H Qureshi. 2023. Structural concept learning via graph attention for multi-level rearrangement planning. InConference on Robot Learning. PMLR, 3180–3193
work page 2023
-
[26]
Shih-Yu Lai, Chia-Ching Yen, Yang-Ting Shen, and Bing-Yu Chen. 2025. Architec- tural CAD/CAM in Robotic Fabrication via Differentiable Energy Optimization and Few-Shot Spatiotemporal Graph RL Policy. InProceedings of the SIGGRAPH Asia 2025 Technical Communications (SA Technical Communications ’25). As- sociation for Computing Machinery, New York, NY, USA,...
-
[27]
2025.Graph Q-Learning for Automatic Assembly in Design-to-Construction
Shih-Yu Lai, Chia-Ching Yen, Yang-Ting Shen, and Bing-Yu Chen. 2025.Graph Q-Learning for Automatic Assembly in Design-to-Construction. Association for Computing Machinery, New York, NY, USA. https://doi.org/10.1145/3757374. 3771881
-
[28]
Quentin Le Lidec, Louis Montaut, Yann de Mont-Marin, and Justin Carpentier
-
[29]
End-to-End and Highly-Efficient Differentiable Simulation for Robotics. (2024). https://doi.org/10.48550/arXiv.2409.07107 arXiv:2409.07107 [cs.RO]
-
[30]
Pok Yin Leung, Aleksandra Apolinarska, Davide Tanadini, Fabio Gramazio, and Matthias Kohler. 2021. Automatic Assembly of Jointed Timber Structure using Distributed Robotic Clamps. https://doi.org/10.52842/conf.caadria.2021.1.583
-
[31]
Fuxian Li, Jie Feng, Huan Yan, Guangyin Jin, Fan Yang, Funing Sun, Depeng Jin, and Yong Li. 2023. Dynamic Graph Convolutional Recurrent Network for Traffic Prediction: Benchmark and Solution.ACM Trans. Knowl. Discov. Data17, 1, Article 9 (feb 2023), 21 pages. https://doi.org/10.1145/3532611
-
[32]
Continuous control with deep reinforcement learning
Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, and Daan Wierstra. 2019. Continuous control with deep reinforcement learning. arXiv:1509.02971 [cs.LG] https://arxiv.org/ abs/1509.02971
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[33]
Yixin Lin, Austin S. Wang, and Akshara Rai. 2021. Efficient and Interpretable Robot Manipulation with Graph Neural Networks.IEEE Robotics and Automation LettersPP (2021), 1–1. https://api.semanticscholar.org/CorpusID:232068621
work page 2021
-
[34]
Ruixuan Liu, Philip Huang, Ava Pun, Kangle Deng, Shobhit Aggarwal, Kevin Tang, Michelle Liu, Deva Ramanan, Jun-Yan Zhu, Jiaoyang Li, and Changliu Liu. 2025. Prompt-to-Product: Generative Assembly via Bimanual Manipulation. arXiv:2508.21063 [cs.RO] https://arxiv.org/abs/2508.21063
-
[35]
Yue Liu, Ke Liang, Jun Xia, Xihong Yang, Sihang Zhou, Meng Liu, Xinwang Liu, and Stan Z. Li. 2023. Reinforcement Graph Clustering with Unknown Cluster Number. InProceedings of the 31st ACM International Conference on Multimedia (<conf-loc>, <city>Ottawa ON</city>, <country>Canada</country>, </conf- loc>)(MM ’23). Association for Computing Machinery, New Y...
-
[36]
V. Lomas-Barrie, R. Silva-Flores, A. Neme, and M. Pena-Cabrera. 2022. A Mul- tiview Recognition Method of Predefined Objects for Robot Assembly Using Deep Learning and Its Implementation on an FPGA.Electronics11, 5 (2022), 696. https://doi.org/10.3390/electronics11050696
-
[37]
Dongsheng Luo, Wei Cheng, Wenchao Yu, Bo Zong, Jingchao Ni, Haifeng Chen, and Xiang Zhang. 2021. Learning to Drop: Robust Graph Neural Network via Topological Denoising. InProceedings of the 14th ACM International Conference on Web Search and Data Mining(Virtual Event, Israel)(WSDM ’21). Association for Computing Machinery, New York, NY, USA, 779–787. htt...
-
[38]
Volodymyr Mnih, Adria Puigdomenech Badia, Mehdi Mirza, Alex Graves, Tim- othy Lillicrap, Tim Harley, David Silver, and Koray Kavukcuoglu. 2016. Asyn- chronous Methods for Deep Reinforcement Learning. InProceedings of The 33rd International Conference on Machine Learning (Proceedings of Machine Learn- ing Research, Vol. 48), Maria Florina Balcan and Kilian...
work page 2016
-
[39]
Louis Montaut, Quentin Le Lidec, Antoine Bambade, Vladimir Petrik, Josef Sivic, and Justin Carpentier. 2023. Differentiable Collision Detection: a Randomized Smoothing Approach. InIEEE International Conference on Robotics and Automa- tion (ICRA). https://doi.org/10.48550/arXiv.2209.09012
-
[40]
Mingshuo Nie, Dongming Chen, and Dongqi Wang. 2023. Reinforcement Learn- ing on Graphs: A Survey.IEEE Transactions on Emerging Topics in Computational Intelligence7, 4 (2023), 1065–1082. https://doi.org/10.1109/TETCI.2022.3222545 EUPHORIA: Efficient Universal Planning via Hybrid Optimization for Robust Industrial Robotic Assembly
-
[41]
Dunlu Peng and Yongsheng Zhang. 2023. MA-GCN: A Memory Augmented Graph Convolutional Network for traffic prediction.Engineering Applications of Artificial Intelligence121 (2023), 106046. https://doi.org/10.1016/j.engappai.2023. 106046
- [42]
-
[43]
Rusu, Dushyant Rao, Jakub Sygnowski, Oriol Vinyals, Razvan Pascanu, Simon Osindero, and Raia Hadsell
Andrei A. Rusu, Dushyant Rao, Jakub Sygnowski, Oriol Vinyals, Razvan Pascanu, Simon Osindero, and Raia Hadsell. 2019. Meta-Learning with Latent Embedding Optimization. InInternational Conference on Learning Representations. https: //openreview.net/forum?id=BJgklhAcK7
work page 2019
- [44]
-
[45]
Jake Snell, Kevin Swersky, and Richard Zemel. 2017. Prototypical Networks for Few-shot Learning. InAdvances in Neural Information Processing Systems, I. Guyon, U. Von Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett (Eds.), Vol. 30. Curran Associates, Inc. https://proceedings.neurips. cc/paper_files/paper/2017/file/cb8da6767461f2...
work page 2017
-
[46]
Sven Stumm, Johannes Braumann, and Sigrid Brell-Çokcan. 2016. Human- Machine Interaction for Intuitive Programming of Assembly Tasks in Construc- tion.Procedia CIRP44 (2016), 269–274. https://api.semanticscholar.org/CorpusID: 63263344
work page 2016
-
[47]
Sven Stumm, Johannes Braumann, Martin von Hilchen, and Sigrid Brell-Çokcan
-
[48]
InInternational Conference on Robotics in Alpe-Adria-Danube Region
On-Site Robotic Construction Assistance for Assembly Using A-Priori Knowledge and Human-Robot Collaboration. InInternational Conference on Robotics in Alpe-Adria-Danube Region. https://api.semanticscholar.org/CorpusID: 2825045
-
[49]
Yunsheng Tian, Joshua Jacob, Yijiang Huang, Jialiang Zhao, Edward Li Gu, Pingchuan Ma, Annan Zhang, Farhad Javid, Branden Romero, Sachin Chitta, Shinjiro Sueda, Hui Li, and Wojciech Matusik. 2025. Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning. In9th Annual Conference on Robot Learning. https://openreview.net...
work page 2025
-
[50]
Yunsheng Tian, Jie Xu, Yichen Li, Jieliang Luo, Shinjiro Sueda, Hui Li, Karl D. D. Willis, and Wojciech Matusik. 2022. Assemble Them All: Physics-Based Planning for Generalizable Assembly by Disassembly.ACM Trans. Graph.41, 6, Article 278 (nov 2022), 11 pages. https://doi.org/10.1145/3550454.3555525
-
[51]
Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Liò, and Yoshua Bengio. 2018. Graph Attention Networks. InInternational Confer- ence on Learning Representations. https://openreview.net/forum?id=rJXMpikCZ
work page 2018
-
[52]
I Vidovszky and A Pém. 2022. Analyses of Automated Bricklaying Workflow Regarding Time and Arrangement.IOP Conference Series: Materials Science and Engineering1218, 1 (jan 2022), 012004. https://doi.org/10.1088/1757-899X/1218/ 1/012004
-
[53]
Ziqi Wang, Wenjun Liu, Jingwen Wang, Gabriel Vallat, Fan Shi, Stefana Parascho, and Maryam Kamgarpour. 2025. Learning to Assemble with Alternative Plans. ACM Trans. Graph.44, 4, Article 101 (July 2025), 16 pages. https://doi.org/10. 1145/3730824
work page 2025
- [54]
-
[55]
Bing Yu, Haoteng Yin, and Zhanxing Zhu. 2018. Spatio-temporal graph convolu- tional networks: a deep learning framework for traffic forecasting. InProceedings of the 27th International Joint Conference on Artificial Intelligence(Stockholm, Sweden)(IJCAI’18). AAAI Press, 3634–3640
work page 2018
-
[56]
Mingxin Yu, Lin Shao, Zhehuan Chen, Tianhao Wu, Qingnan Fan, Kaichun Mo, and Hao Dong. 2021. RoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot Contact-rich Simulation Environment.ArXiv abs/2112.10143 (2021). https://api.semanticscholar.org/CorpusID:245334838
- [57]
-
[58]
Chris Zhang, Mengye Ren, and Raquel Urtasun. 2019. Graph HyperNetworks for Neural Architecture Search. InInternational Conference on Learning Repre- sentations. https://openreview.net/forum?id=rkgW0oA9FX
work page 2019
-
[59]
Wenshuai Zhao, Eetu Rantala, Joni Pajarinen, and Jorge Peña Queralta. 2023. Less Is More: Robust Robot Learning via Partially Observable Multi-Agent Rein- forcement Learning
work page 2023
-
[60]
Chuanpan Zheng, Xiaoliang Fan, Cheng Wang, and Jianzhong Qi. 2020. GMAN: A Graph Multi-Attention Network for Traffic Prediction.Proceedings of the AAAI Conference on Artificial Intelligence34, 01 (Apr. 2020), 1234–1241. https: //doi.org/10.1609/aaai.v34i01.5477
-
[61]
Jie Zhou, Ganqu Cui, Shengding Hu, Zhengyan Zhang, Cheng Yang, Zhiyuan Liu, Lifeng Wang, Changcheng Li, and Maosong Sun. 2020. Graph neural networks: A review of methods and applications.AI Open1 (2020), 57–81. https://doi.org/ 10.1016/j.aiopen.2021.01.001
-
[62]
Yueqing Zhuang, Li Tao, Fan Yang, Cong Ma, Ziwei Zhang, Huizhu Jia, and Xiaodong Xie. 2018. RelationNet: Learning Deep-Aligned Representation for Semantic Image Segmentation. In2018 24th International Conference on Pattern Recognition (ICPR). 1506–1511. https://doi.org/10.1109/ICPR.2018.8545708 Supplementary Materials A Algorithm Details This section prov...
-
[63]
Critic Update:The parameters 𝜔 of the soft Q-function are updated by minimizing the Bellman residual: 𝐽𝑄(𝜔) =E B h𝑄𝜔(𝑠, 𝑎)− 𝑟+𝛾E 𝑎′∼𝜋𝜃 [𝑄 ¯𝜔(𝑠′, 𝑎′)−𝛼 ent log𝜋 𝜃 (𝑎′ |𝑠 ′)] 2i . (16)
-
[64]
Hypernetwork Update:Unlike standard SAC where policy pa- rameters 𝜃 are optimized directly, in EUPHORIA, 𝜃 is generated by H𝜙(𝑧). Thus, we optimize the hypernetwork parameters 𝜙 by backpropagating the policy loss through the generation process: 𝐽𝜋 (𝜙) =E 𝑠∼B,𝜖∼N h 𝛼ent log𝜋 H𝜙 (𝑧)(𝑓𝜙(𝜖, 𝑠)|𝑠)−𝑄 𝜔(𝑠, 𝑓𝜙(𝜖, 𝑠)) i , (17) where 𝑓𝜙(𝜖, 𝑠)denotes the reparameter...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.