Distributionally Robust Control via Stein Variational Inference for Contact-Rich Manipulation
Pith reviewed 2026-05-20 09:20 UTC · model grok-4.3
The pith
Introduces a Stein variational inference-based deterministic formulation for distributionally robust control in contact-rich robotic manipulation, reporting up to 3x improved robustness under parametric uncertainty.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
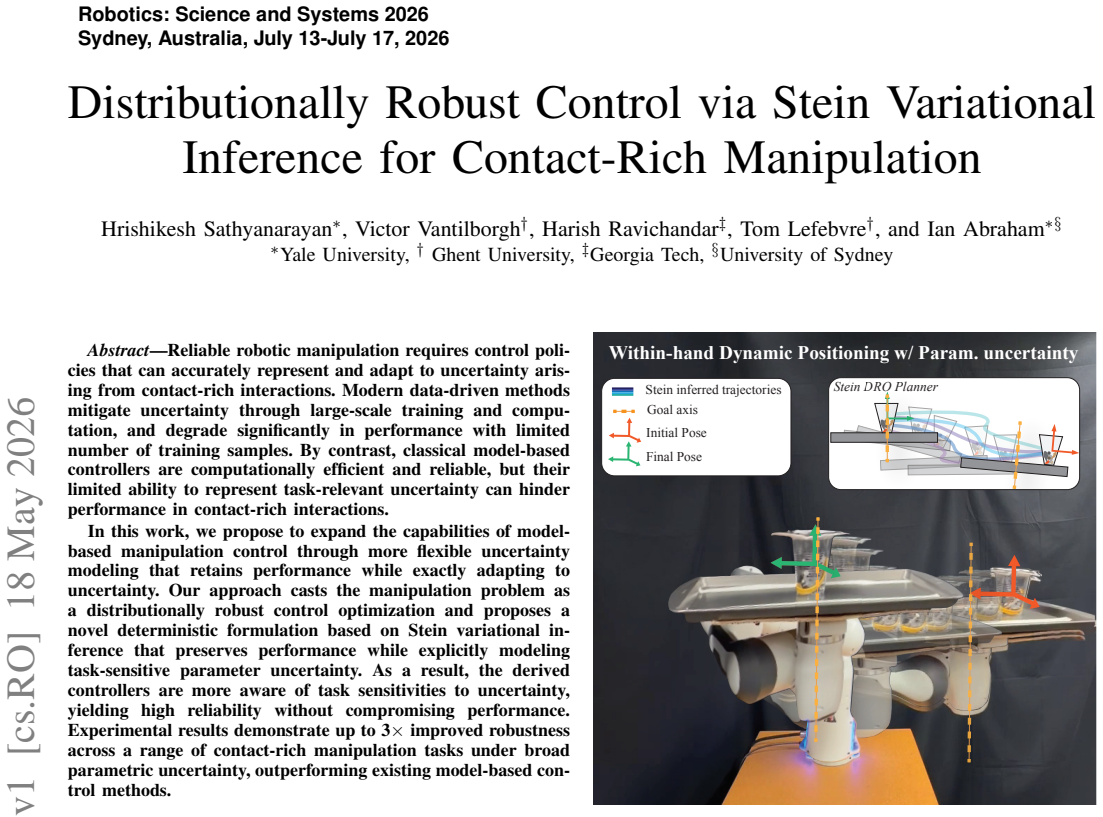
the derived controllers are more aware of task sensitivities to uncertainty, yielding high reliability without compromising performance. Experimental results demonstrate up to 3× improved robustness across a range of contact-rich manipulation tasks under broad parametric uncertainty, outperforming existing model-based control methods.
Load-bearing premise
That Stein variational inference yields a sufficiently accurate and tractable deterministic approximation to the distributionally robust optimization problem for contact parameter uncertainty without introducing errors that undermine the claimed robustness gains (location: abstract description of the novel formulation).
Figures







read the original abstract
Reliable robotic manipulation requires control policies that can accurately represent and adapt to uncertainty arising from contact-rich interactions. Modern data-driven methods mitigate uncertainty through large-scale training and computation, and degrade significantly in performance with limited number of training samples. By contrast, classical model-based controllers are computationally efficient and reliable, but their limited ability to represent task-relevant uncertainty can hinder performance in contact-rich interactions. In this work, we propose to expand the capabilities of model-based manipulation control through more flexible uncertainty modeling that retains performance while exactly adapting to uncertainty. Our approach casts the manipulation problem as a distributionally robust control optimization and proposes a novel deterministic formulation based on Stein variational inference that preserves performance while explicitly modeling task-sensitive parameter uncertainty. As a result, the derived controllers are more aware of task sensitivities to uncertainty, yielding high reliability without compromising performance. Experimental results demonstrate up to 3$\times$ improved robustness across a range of contact-rich manipulation tasks under broad parametric uncertainty, outperforming existing model-based control methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper casts contact-rich robotic manipulation as a distributionally robust control problem and introduces a deterministic approximation based on Stein variational inference (SVI). SVI particles represent the worst-case distribution over uncertain contact parameters; the resulting controller optimizes a tractable surrogate objective that retains the robustness goal while preserving nominal performance. Experiments across multiple manipulation tasks under parametric uncertainty sweeps report up to 3× gains in reliability metrics relative to standard model-based baselines.
Significance. If the central derivation and experiments hold, the work provides a practical bridge between classical model-based control and distributional robustness without requiring large-scale data or sacrificing computational efficiency. The SVI-based deterministic formulation is a technically interesting contribution that could be adopted in other contact-rich domains. The isolation of robustness gains via controlled uncertainty sweeps is a positive feature of the evaluation.
major comments (2)
- [§3.2] §3.2 (SVI formulation): the claim that the particle-based surrogate 'exactly adapts to uncertainty' needs an explicit statement of the approximation error relative to the infinite-dimensional DRO problem; without a bound or convergence argument, it is unclear whether the reported robustness gains are guaranteed or could degrade under different particle counts or initializations.
- [Experimental results section] Experimental results section, robustness metric definition: the 3× improvement is reported for specific tasks, but the paper does not show that the metric (e.g., success rate or cost under worst-case samples) is insensitive to the choice of ambiguity-set radius; a sensitivity plot or additional sweep would confirm that the gain is not an artifact of a particular uncertainty level.
minor comments (3)
- Notation for the contact-parameter distribution and the ambiguity set should be introduced once with a clear table or diagram; repeated re-definition across sections makes the DRO objective harder to follow.
- The baseline controllers (e.g., nominal MPC, robust MPC) are compared, but the implementation details such as horizon length, cost weights, and solver tolerances are only summarized; adding a short table would improve reproducibility.
- Figure captions for the uncertainty-sweep plots should explicitly state the number of SVI particles and random seeds used so readers can assess statistical reliability of the 3× claim.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and constructive comments. We address each major comment below and indicate the corresponding revisions to the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (SVI formulation): the claim that the particle-based surrogate 'exactly adapts to uncertainty' needs an explicit statement of the approximation error relative to the infinite-dimensional DRO problem; without a bound or convergence argument, it is unclear whether the reported robustness gains are guaranteed or could degrade under different particle counts or initializations.
Authors: We agree that the finite-particle SVI surrogate is an approximation to the infinite-dimensional DRO problem and that the manuscript would benefit from greater clarity on this point. The current wording 'exactly adapts' refers to the fact that the deterministic formulation directly optimizes over the worst-case distribution represented by the particles rather than relying on sampling-based Monte Carlo estimates; however, we acknowledge that this is subject to approximation error that vanishes only in the limit. In the revised manuscript we will (i) revise the claim in §3.2 to 'adapts to uncertainty via a deterministic particle-based surrogate,' (ii) add a short paragraph citing standard convergence results for Stein variational inference under suitable kernel and step-size conditions, and (iii) report additional ablation results varying particle count and initialization to show that the reported robustness gains remain stable for the particle numbers used in the experiments. revision: yes
-
Referee: [Experimental results section] Experimental results section, robustness metric definition: the 3× improvement is reported for specific tasks, but the paper does not show that the metric (e.g., success rate or cost under worst-case samples) is insensitive to the choice of ambiguity-set radius; a sensitivity plot or additional sweep would confirm that the gain is not an artifact of a particular uncertainty level.
Authors: We concur that explicit sensitivity analysis strengthens the evaluation. In the revised manuscript we will add a new figure (or panel) in the experimental results section that sweeps the ambiguity-set radius over a range of values for the primary tasks and reports the corresponding success-rate and cost metrics. This will confirm that the observed gains relative to the baselines are consistent across reasonable choices of the radius and are not artifacts of a single operating point. revision: yes
Circularity Check
No significant circularity detected in derivation
full rationale
The paper formulates contact-rich manipulation as a distributionally robust control problem and introduces a Stein variational inference-based deterministic approximation to handle parametric uncertainty. This surrogate is derived to retain the robustness objective while remaining tractable, with SVI particles representing the worst-case distribution over contact parameters. The central claim does not reduce by construction to fitted inputs, self-definitions, or load-bearing self-citations; the approximation is explicitly presented as a practical surrogate rather than an exact equivalence to the infinite-dimensional DRO problem. Experiments isolate robustness gains via independent parametric uncertainty sweeps on multiple tasks, confirming the derivation chain is self-contained against external benchmarks without circular reductions.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
casts the manipulation problem as a distributionally robust control optimization and proposes a novel deterministic formulation based on Stein variational inference
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SVGD ... evolve deterministic particles ... task-aware parameter posterior
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ian Abraham, Ankur Handa, Nathan Ratliff, Kendall Lowrey, Todd D. Murphey, and Dieter Fox. Model- based generalization under parameter uncertainty using path integral control.IEEE Robotics and Automation Letters, 5(2):2864–2871, April 2020. ISSN 2377-3774. doi: 10.1109/lra.2020.2972836. URL http://dx.doi.org/ 10.1109/LRA.2020.2972836
-
[2]
Christensen, Hao Su, Jiajun Wu, and Yunzhu Li
Bo Ai, Stephen Tian, Haochen Shi, Yixuan Wang, To- bias Pfaff, Cheston Tan, Henrik I. Christensen, Hao Su, Jiajun Wu, and Yunzhu Li. A review of learning- based dynamics models for robotic manipulation.Sci- ence Robotics, 10(106):eadt1497, 2025. doi: 10.1126/ scirobotics.adt1497. URL https://www.science.org/doi/ abs/10.1126/scirobotics.adt1497
-
[3]
Dual on- line stein variational inference for control and dynamics,
Lucas Barcelos, Alexander Lambert, Rafael Oliveira, Paulo Borges, Byron Boots, and Fabio Ramos. Dual on- line stein variational inference for control and dynamics,
- [4]
-
[5]
Wiley Series in Probability and Statistics: Probability and Statistics
Patrick Billingsley.Convergence of probability measures. Wiley Series in Probability and Statistics: Probability and Statistics. John Wiley & Sons Inc., New York, second edition, 1999. ISBN 0-471-19745-9. A Wiley- Interscience Publication
work page 1999
-
[6]
Diffusion policy: Visuomotor policy learning via action diffusion, 2024
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action diffusion, 2024. URL https://arxiv.org/abs/2303. 04137
work page 2024
-
[7]
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Embodiment Collaboration and Abby O’Neill et al. Open x-embodiment: Robotic learning datasets and rt-x mod- els, 2025. URL https://arxiv.org/abs/2310.08864
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[8]
Mankowitz, Jerry Li, Cosmin Paduraru, Sven Gowal, and Todd Hes- ter
Gabriel Dulac-Arnold, Nir Levine, Daniel J. Mankowitz, Jerry Li, Cosmin Paduraru, Sven Gowal, and Todd Hes- ter. An empirical investigation of the challenges of real-world reinforcement learning, 2021. URL https: //arxiv.org/abs/2003.11881
-
[9]
Rishi Bommasani et. al. On the opportunities and risks of foundation models, 2022. URL https://arxiv.org/abs/ 2108.07258
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[10]
Christian Fiedler, Carsten W. Scherer, and Sebastian Trimpe. Learning-enhanced robust controller synthesis with rigorous statistical and control-theoretic guarantees,
- [11]
-
[12]
Grounding language with visual affordances over un- structured data
Astghik Hakobyan and Insoon Yang. Distribution- ally robust optimization with unscented transform for learning-based motion control in dynamic environments. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 3225–3232, 2023. doi: 10.1109/ICRA48891.2023.10161246
-
[13]
Learning Continuous Control Policies by Stochastic Value Gradients
Nicolas Heess, Greg Wayne, David Silver, Timothy Lil- licrap, Yuval Tassa, and Tom Erez. Learning continuous control policies by stochastic value gradients, 2015. URL https://arxiv.org/abs/1510.09142
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[14]
Fail2progress: Learning from real-world robot failures with stein variational in- ference, 2025
Yixuan Huang, Novella Alvina, Mohanraj Devendran Shanthi, and Tucker Hermans. Fail2progress: Learning from real-world robot failures with stein variational in- ference, 2025. URL https://arxiv.org/abs/2509.01746
- [15]
-
[16]
Michael G. Kapteyn, Karen E. Willcox, and Andy Philpott.A Distributionally Robust Approach to Black- Box Optimization. doi: 10.2514/6.2018-0666. URL https://arc.aiaa.org/doi/abs/10.2514/6.2018-0666
-
[17]
Jaywant P. Kolhe, Md Shaheed, T.S. Chandar, and S.E. Talole. Robust control of robot manipulators based on uncertainty and disturbance estimation.International Journal of Robust and Nonlinear Control, 23(1):104– 122, 2013. doi: https://doi.org/10.1002/rnc.1823. URL https://onlinelibrary.wiley.com/doi/abs/10.1002/rnc.1823
-
[18]
Vijay Konda and John Tsitsiklis. Actor-critic algorithms. In S. Solla, T. Leen, and K. M ¨uller, editors,Advances in Neural Information Processing Systems, volume 12. MIT Press, 1999. URL https://proceedings.neurips.cc/paper files/paper/1999/ file/6449f44a102fde848669bdd9eb6b76fa-Paper.pdf
work page 1999
-
[19]
A non-asymptotic analysis for stein variational gradient descent, 2021
Anna Korba, Adil Salim, Michael Arbel, Giulia Luise, and Arthur Gretton. A non-asymptotic analysis for stein variational gradient descent, 2021. URL https://arxiv.org/ abs/2006.09797
-
[20]
Distributionally robust optimization, 2025
Daniel Kuhn, Soroosh Shafiee, and Wolfram Wiesemann. Distributionally robust optimization, 2025. URL https: //arxiv.org/abs/2411.02549
-
[21]
Stein variational model predic- tive control, 2021
Alexander Lambert, Adam Fishman, Dieter Fox, Byron Boots, and Fabio Ramos. Stein variational model predic- tive control, 2021. URL https://arxiv.org/abs/2011.07641
-
[22]
Yewon Lee, Andrew Z. Li, Philip Huang, Eric Heiden, Krishna Murthy Jatavallabhula, Fabian Damken, Kevin Smith, Derek Nowrouzezahrai, Fabio Ramos, and Florian Shkurti. Stamp: Differentiable task and motion planning via stein variational gradient descent, 2024. URL https: //arxiv.org/abs/2310.01775
-
[23]
Soft contact model for robust locomotion of legged robots
Yong-Hoon Lee, Keuntae Kim, Jaehyun Park, Chung Hyuk Park, and Hae-Won Park. Soft contact model for robust locomotion of legged robots
-
[24]
End-to-end training of deep visuomotor policies,
Sergey Levine, Chelsea Finn, Trevor Darrell, and Pieter Abbeel. End-to-end training of deep visuomotor policies,
-
[25]
URL https://arxiv.org/abs/1504.00702
work page internal anchor Pith review Pith/arXiv arXiv
-
[26]
Lei Li, Yingzhou Li, Jian-Guo Liu, Zibu Liu, and Jianfeng Lu. A stochastic version of stein variational gradient descent for efficient sampling.Communica- tions in Applied Mathematics and Computational Sci- ence, 15(1):37–63, June 2020. ISSN 1559-3940. doi: 10.2140/camcos.2020.15.37. URL http://dx.doi.org/10. 2140/camcos.2020.15.37
-
[27]
Stein variational gradient descent: A general purpose bayesian inference algorithm,
Qiang Liu and Dilin Wang. Stein variational gradient descent: A general purpose bayesian inference algorithm,
- [28]
-
[29]
Data- driven distributionally robust optimal control with state- dependent noise, 2025
Rui Liu, Guangyao Shi, and Pratap Tokekar. Data- driven distributionally robust optimal control with state- dependent noise, 2025. URL https://arxiv.org/abs/2303. 02293
work page 2025
-
[30]
Kehan Long, Yinzhuang Yi, Zhirui Dai, Sylvia Herbert, Jorge Cort ´es, and Nikolay Atanasov. Sensor-based dis- tributionally robust control for safe robot navigation in dynamic environments, 2025. URL https://arxiv.org/abs/ 2405.18251
-
[31]
Plan online, learn offline: Efficient learning and exploration via model- based control, 2019
Kendall Lowrey, Aravind Rajeswaran, Sham Kakade, Emanuel Todorov, and Igor Mordatch. Plan online, learn offline: Efficient learning and exploration via model- based control, 2019. URL https://arxiv.org/abs/1811. 01848
work page 2019
-
[33]
Apriltag: A robust and flexible visual fiducial system
Edwin Olson. Apriltag: A robust and flexible visual fiducial system. In2011 IEEE International Conference on Robotics and Automation, pages 3400–3407, 2011. doi: 10.1109/ICRA.2011.5979561
-
[34]
Learning Dexterous In-Hand Manipulation
OpenAI, Marcin Andrychowicz, Bowen Baker, Maciek Chociej, Rafal Jozefowicz, Bob McGrew, Jakub Pa- chocki, Arthur Petron, Matthias Plappert, Glenn Powell, Alex Ray, Jonas Schneider, Szymon Sidor, Josh Tobin, Peter Welinder, Lilian Weng, and Wojciech Zaremba. Learning dexterous in-hand manipulation, 2019. URL https://arxiv.org/abs/1808.00177
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[35]
Sim-to-real transfer of robotic control with dynamics randomization
Xue Bin Peng, Marcin Andrychowicz, Wojciech Zaremba, and Pieter Abbeel. Sim-to-real transfer of robotic control with dynamics randomization. In2018 IEEE International Conference on Robotics and Automa- tion (ICRA), pages 3803–3810, 2018. doi: 10.1109/ ICRA.2018.8460528
-
[36]
Sim-to-real transfer of robotic control with dynamics randomization
Xue Bin Peng, Marcin Andrychowicz, Wojciech Zaremba, and Pieter Abbeel. Sim-to-real transfer of robotic control with dynamics randomization. In2018 IEEE International Conference on Robotics and Automa- tion (ICRA), page 3803–3810. IEEE, May 2018. doi: 10.1109/icra.2018.8460528. URL http://dx.doi.org/10. 1109/ICRA.2018.8460528
-
[37]
Constrained stein variational trajectory optimization, 2024
Thomas Power and Dmitry Berenson. Constrained stein variational trajectory optimization, 2024. URL https:// arxiv.org/abs/2308.12110
-
[38]
Hamed Rahimian and Sanjay Mehrotra. Frameworks and results in distributionally robust optimization.Open Jour- nal of Mathematical Optimization, 3:1–85, July 2022. ISSN 2777-5860. doi: 10.5802/ojmo.15. URL http: //dx.doi.org/10.5802/ojmo.15
-
[39]
EPOpt: Learning Robust Neural Network Policies Using Model Ensembles
Aravind Rajeswaran, Sarvjeet Ghotra, Balaraman Ravin- dran, and Sergey Levine. Epopt: Learning robust neural network policies using model ensembles, 2017. URL https://arxiv.org/abs/1610.01283
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[40]
Behavior Synthesis via Contact-Aware Fisher Information Maximization
Hrishikesh Sathyanarayan and Ian Abraham. Behavior synthesis via contact-aware fisher information maximiza- tion, 2025. URL https://arxiv.org/abs/2505.12214
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[41]
Use of exchangeable pairs in the analysis of sim- ulations
Charles Stein, Persi Diaconis, Susan Holmes, and Gesine Reinert. Use of exchangeable pairs in the analysis of sim- ulations. 46, 01 2004. doi: 10.1214/lnms/1196283797
-
[42]
Distributionally robust sampling-based motion planning under uncertainty
Tyler Summers. Distributionally robust sampling-based motion planning under uncertainty. In2018 IEEE/RSJ In- ternational Conference on Intelligent Robots and Systems (IROS), pages 6518–6523, 2018. doi: 10.1109/IROS. 2018.8593893
- [43]
-
[44]
Domain randomization via entropy maximization, 2024
Gabriele Tiboni, Pascal Klink, Jan Peters, Tatiana Tom- masi, Carlo D’Eramo, and Georgia Chalvatzaki. Domain randomization via entropy maximization, 2024. URL https://arxiv.org/abs/2311.01885
-
[45]
Domain random- ization for transferring deep neural networks from simu- lation to the real world
Josh Tobin, Rachel Fong, Alex Ray, Jonas Schneider, Wojciech Zaremba, and Pieter Abbeel. Domain random- ization for transferring deep neural networks from simu- lation to the real world. In2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 23–30, 2017. doi: 10.1109/IROS.2017.8202133
-
[46]
Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
Josh Tobin, Rachel Fong, Alex Ray, Jonas Schneider, Wojciech Zaremba, and Pieter Abbeel. Domain ran- domization for transferring deep neural networks from simulation to the real world, 2017. URL https://arxiv. org/abs/1703.06907
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[47]
Victor Vantilborgh, Hrishikesh Sathyanarayan, Guil- laume Crevecoeur, Ian Abraham, and Tom Lefebvre. Dual control reference generation for optimal pick-and- place execution under payload uncertainty, 2025. URL https://arxiv.org/abs/2510.20483
-
[48]
P. Whittle. Risk-sensitive linear/quadratic/gaussian con- trol.Advances in Applied Probability, 13(4):764–777,
-
[49]
doi: 10.2307/1426972
-
[50]
Liang Yan and Tao Zhou. Stein variational gradient descent with local approximations.Computer Methods in Applied Mechanics and Engineering, 386:114087,
-
[51]
Marine Pollution Bulletin 123, 73–82
ISSN 0045-7825. doi: https://doi.org/10.1016/j. cma.2021.114087. URL https://www.sciencedirect.com/ science/article/pii/S0045782521004187
work page doi:10.1016/j 2021
-
[52]
Dan Zhang and Bin Wei. A review on model refer- ence adaptive control of robotic manipulators.Annual Reviews in Control, 43:188–198, 2017. ISSN 1367-
work page 2017
-
[53]
doi: https://doi.org/10.1016/j.arcontrol.2017.02
-
[54]
URL https://www.sciencedirect.com/science/article/ pii/S1367578816301110
-
[55]
Sample efficient reinforcement learning with reinforce, 2020
Junzi Zhang, Jongho Kim, Brendan O’Donoghue, and Stephen Boyd. Sample efficient reinforcement learning with reinforce, 2020. URL https://arxiv.org/abs/2010. 11364
work page 2020
-
[56]
Sim-to-real transfer in deep reinforcement learning for robotics: a survey
Wenshuai Zhao, Jorge Pe ˜na Queralta, and Tomi Wester- lund. Sim-to-real transfer in deep reinforcement learning for robotics: a survey. In2020 IEEE Symposium Series on Computational Intelligence (SSCI), pages 737–744,
-
[57]
doi: 10.1109/SSCI47803.2020.9308468
-
[58]
Message passing stein variational gradient descent, 2018
Jingwei Zhuo, Chang Liu, Jiaxin Shi, Jun Zhu, Ning Chen, and Bo Zhang. Message passing stein variational gradient descent, 2018. URL https://arxiv.org/abs/1711. 04425
work page 2018
-
[59]
Nadina O. Zweifel, Nicholas E. Bush, Ian Abraham, Todd D. Murphey, and Mitra J. Z. Hartmann. A dynami- cal model for generating synthetic data to quantify active tactile sensing behavior in the rat.Proceedings of the National Academy of Sciences, 118(27):e2011905118,
-
[60]
doi: 10.1073/pnas.2011905118. URL https://www. pnas.org/doi/abs/10.1073/pnas.2011905118. APPENDIXA PROOFS SVGD Convergence inΘ Here we overview the theoretical guarantees of convergence of evolving parameters{θ i t}N i=1 inΘ. Similar to [24] using [17, Corollary 6] shows that SVGD converges to the true posterior distribution with enough samples. Theorem 1...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.