Sensing Intelligence as a Trainable Metamaterial Property
Pith reviewed 2026-06-30 21:33 UTC · model grok-4.3
The pith
A metamaterial's geometry can be trained via backpropagation to preprocess external stimuli into signals easier for a neural network to interpret.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
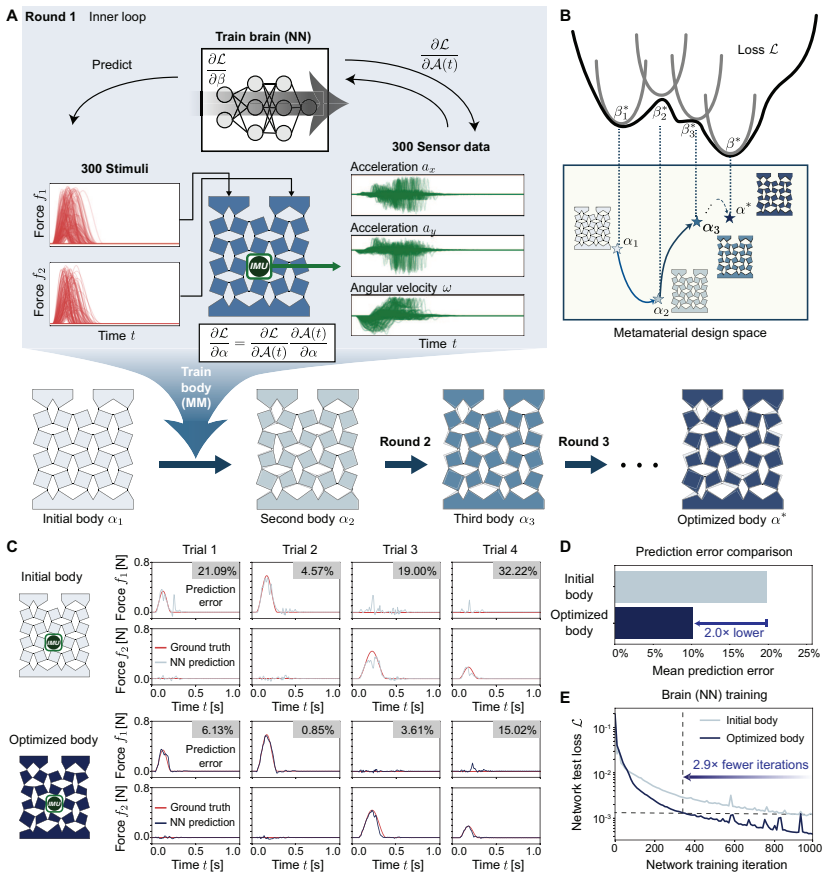
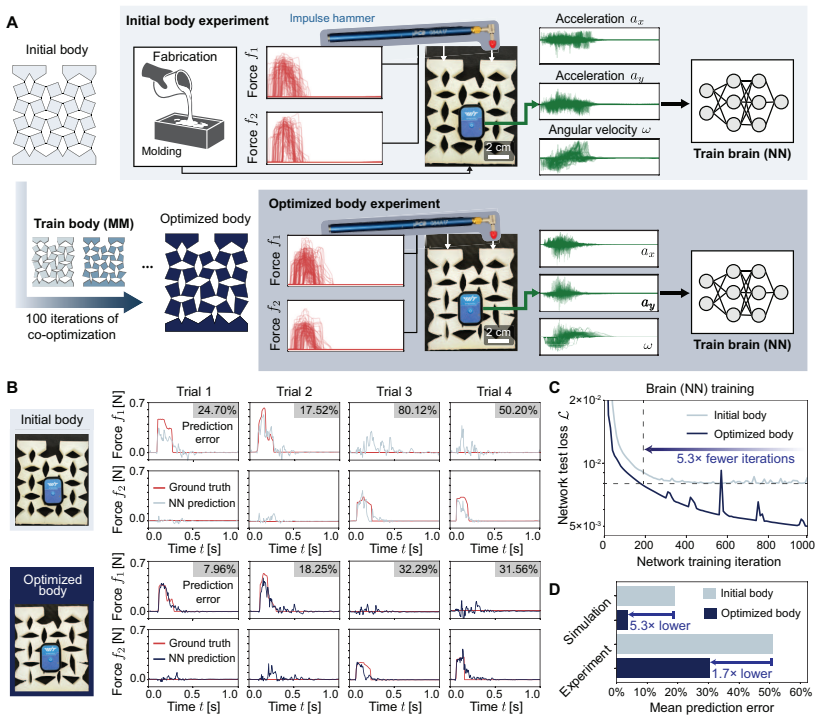
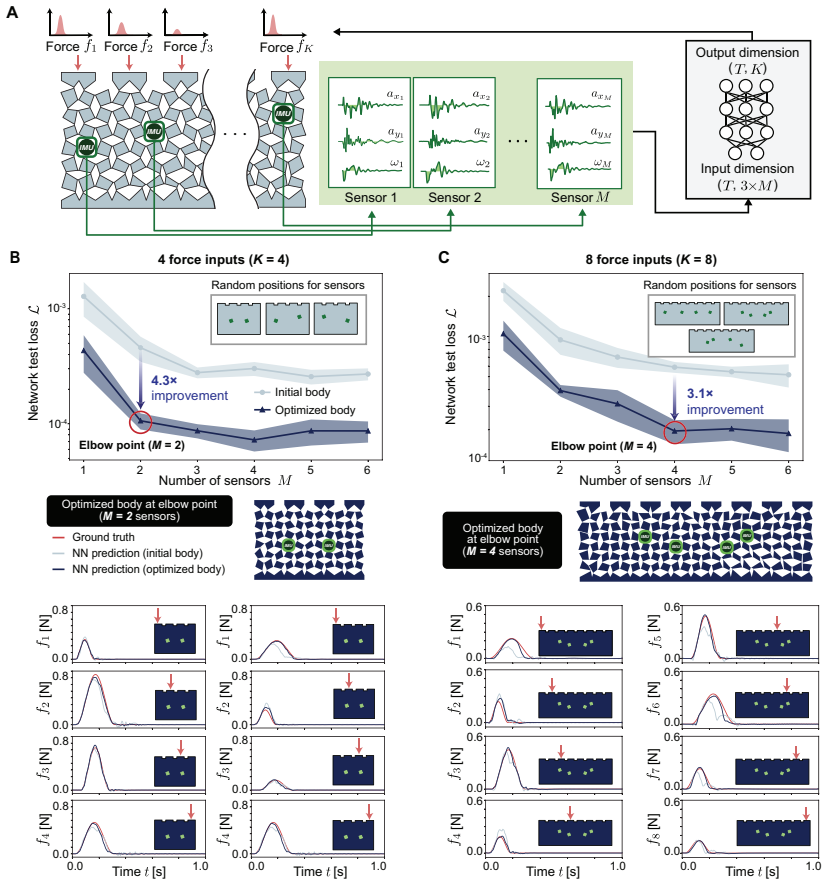
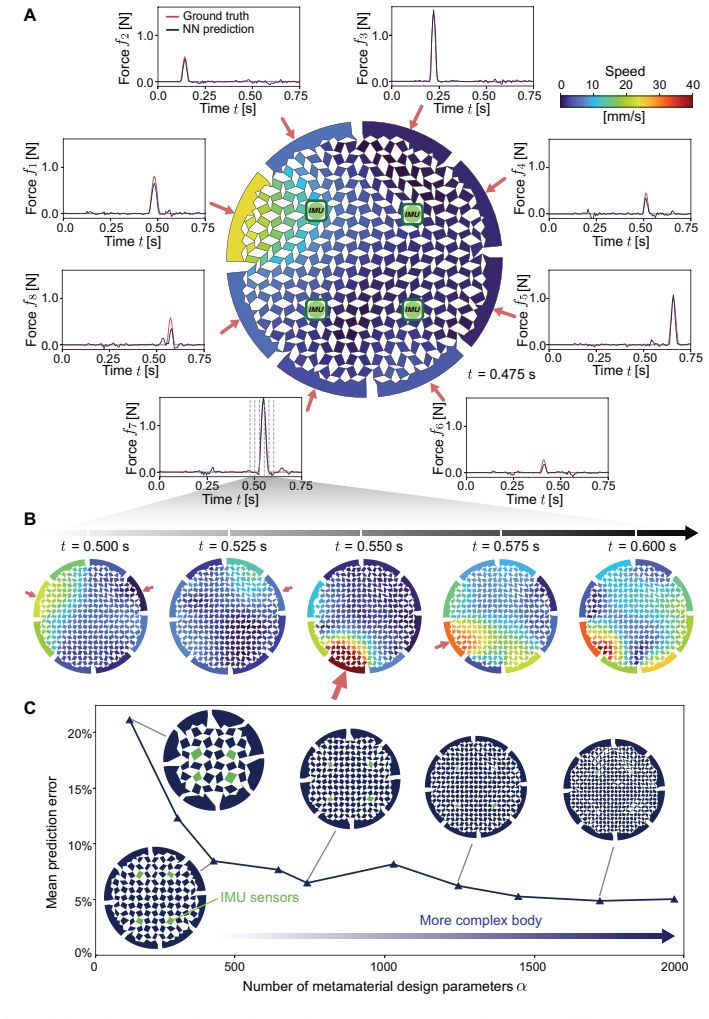
The geometry of a metamaterial can be optimized to reshape external stimuli into internal signals that are easier for a neural network to interpret. Rather than hand-designing this physical preprocessing, the neural network trains its own body for sensing by backpropagating the sensing loss to the body's design parameters through differentiable simulation. Across numerical and experimental sensing scenarios, the optimized body improves sensing accuracy by up to fivefold or reduces the number of required electronic sensors by nearly an order of magnitude.
What carries the argument
Differentiable simulation that propagates sensing loss gradients back to metamaterial geometry parameters, allowing the physical structure to be optimized jointly with the neural network.
If this is right
- Physical preprocessing in the metamaterial can raise sensing accuracy by up to five times in tested scenarios.
- The number of electronic sensors required for a given accuracy level can drop by nearly an order of magnitude.
- The mechanical body becomes a co-trainable component of the sensing system rather than a fixed structure.
- The same differentiable-simulation approach applies to both simulated and physical sensing tasks.
- Design effort shifts from manual geometry specification to loss-driven optimization of the body.
Where Pith is reading between the lines
- The method could be extended to optimize metamaterial properties for actuation or energy harvesting in addition to sensing.
- Successful hardware transfer would support building robots whose bodies and controllers evolve together under a single loss.
- Sensor reduction could lower system cost and complexity in wearable or embedded sensing applications.
- The separation between mechanical body and computational brain becomes less fundamental in engineered systems.
Load-bearing premise
The differentiable simulation accurately models real-world physical deformation, vibration, and filtering so that designs optimized in simulation perform well when built and tested in hardware.
What would settle it
Fabricate the simulation-optimized metamaterial geometry, apply the same external stimuli used in training, and measure whether sensing accuracy improves by at most a factor of one or the required sensor count stays unchanged compared with a non-optimized control body.
Figures
read the original abstract
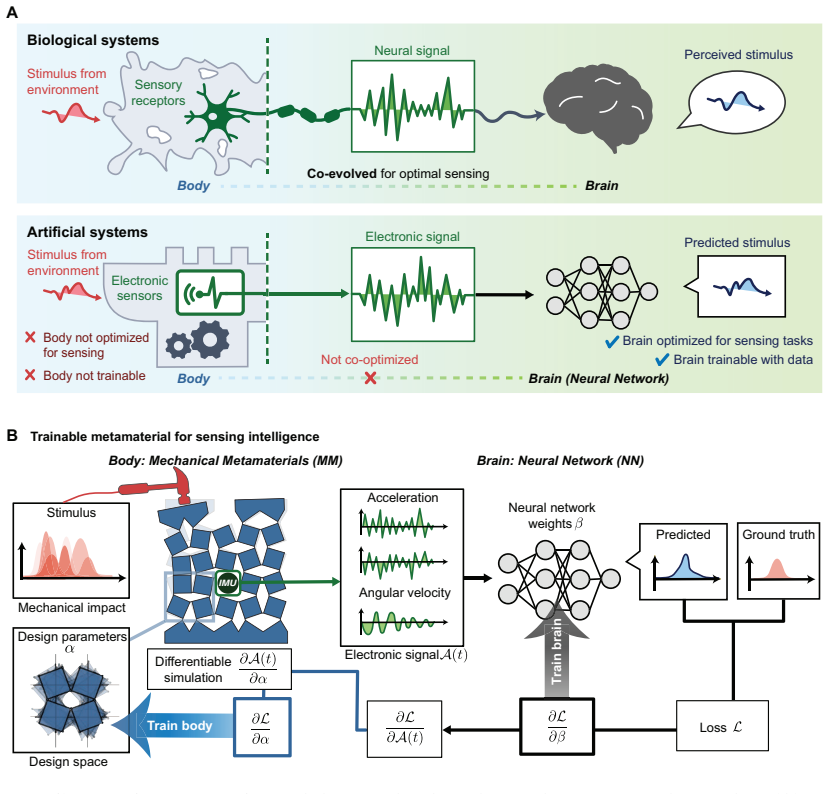
In biological systems, sensing is not performed by the brain alone: the body deforms, vibrates, and filters external stimuli before they are transduced into neural signals. In engineered systems, this processing burden is placed largely on electronics and computation, while the mechanical body is usually designed only for strength and stability. Here, we present sensing intelligence as a trainable property of the body. We show that the geometry of a metamaterial can be optimized to reshape external stimuli into internal signals that are easier for a neural network to interpret. Rather than hand-designing this physical preprocessing, we let the neural network train its own body for sensing by backpropagating the sensing loss to the body's design parameters through differentiable simulation. Across numerical and experimental sensing scenarios, the optimized body improves sensing accuracy by up to fivefold or reduces the number of required electronic sensors by nearly an order of magnitude.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that metamaterial geometry can be treated as a trainable property: by backpropagating a sensing loss through a differentiable simulator, the physical structure is optimized to reshape external stimuli into internal signals that a downstream neural network can interpret more easily. This yields up to fivefold gains in sensing accuracy or nearly an order-of-magnitude reduction in the number of electronic sensors, with results shown across both numerical simulations and physical experiments.
Significance. If the sim-to-real transfer is robust, the work demonstrates a concrete route to co-designing mechanical preprocessing with neural inference, shifting computational burden from electronics to geometry. The differentiable-simulation pipeline itself is a methodological strength that enables gradient-based optimization of continuum structures for task-specific sensing.
major comments (2)
- [Experimental Results] Experimental Results section: the reported physical gains (accuracy or sensor reduction) are presented without quantitative metrics comparing simulator predictions to measured hardware behavior (e.g., frequency response, damping ratios, or contact nonlinearities). Without these, it is impossible to determine whether the optimizer exploited simulation-specific artifacts or whether the claimed preprocessing benefit survives fabrication and real-world conditions.
- [Methods] Methods, differentiable simulator description: the fidelity of the forward model (mesh resolution, constitutive law, boundary conditions) is not characterized with respect to the physical specimens used in experiments. If key effects such as viscoelasticity or 3D wave propagation are omitted or approximated, the backpropagated designs may not generalize, undermining the central claim that the optimized body improves sensing in hardware.
minor comments (2)
- Figure captions should explicitly state whether each panel shows simulation or experimental data and include error bars or trial counts.
- Notation for the sensing loss and the geometry parameterization should be introduced once with a clear equation reference rather than redefined inline.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the revisions that will be incorporated.
read point-by-point responses
-
Referee: [Experimental Results] Experimental Results section: the reported physical gains (accuracy or sensor reduction) are presented without quantitative metrics comparing simulator predictions to measured hardware behavior (e.g., frequency response, damping ratios, or contact nonlinearities). Without these, it is impossible to determine whether the optimizer exploited simulation-specific artifacts or whether the claimed preprocessing benefit survives fabrication and real-world conditions.
Authors: We agree that quantitative sim-to-real metrics are necessary to evaluate whether the reported gains reflect genuine physical preprocessing or simulation artifacts. The current manuscript demonstrates hardware performance but omits explicit error statistics between simulated and measured responses. In revision we will add a new subsection (or supplementary table) reporting correlation coefficients for frequency responses, relative errors in damping ratios, and contact-force discrepancies for both baseline and optimized specimens. This addition will allow direct assessment of model fidelity and the robustness of the optimized designs under real-world conditions. revision: yes
-
Referee: [Methods] Methods, differentiable simulator description: the fidelity of the forward model (mesh resolution, constitutive law, boundary conditions) is not characterized with respect to the physical specimens used in experiments. If key effects such as viscoelasticity or 3D wave propagation are omitted or approximated, the backpropagated designs may not generalize, undermining the central claim that the optimized body improves sensing in hardware.
Authors: The referee correctly identifies that the forward-model assumptions are not fully benchmarked against the experimental hardware. We will expand the Methods section to specify mesh resolution, the constitutive model (linear elasticity with measured material parameters), boundary conditions, and the treatment of viscoelasticity and out-of-plane effects. In addition, we will include validation comparisons (e.g., simulated versus measured transfer functions) for representative specimens to quantify the approximation error and support the claim that the optimized geometries transfer to hardware. revision: yes
Circularity Check
No circularity detected; optimization driven by external loss
full rationale
The paper's core method optimizes metamaterial geometry by backpropagating an external sensing loss through differentiable simulation. This is a standard differentiable design pipeline with no reduction of outputs to inputs by construction. No self-definitional equations, fitted parameters renamed as predictions, or load-bearing self-citations appear in the provided abstract or description. The sensing loss is independent of the geometry parameters, and claimed experimental validation further decouples the result from simulation artifacts. This is the expected non-finding for an optimization paper whose central claim rests on an external objective.
Axiom & Free-Parameter Ledger
free parameters (1)
- metamaterial geometry parameters
axioms (1)
- domain assumption Differentiable simulation accurately models the physical response of the metamaterial
Reference graph
Works this paper leans on
-
[1]
Z. Gong, et al. , Advanced Intelligent Systems 5, 2300154 (2023). eprint: https://advanced.onlinelibrary.wiley.com/doi/pdf/10.1002/aisy.202300154
-
[2]
Tiwary, et al., Science Advances 11, eady2888 (2025)
K. Tiwary, et al., Science Advances 11, eady2888 (2025)
2025
-
[3]
R. B. Towal, B. W. Quist, V . Gopal, J. H. Solomon, M. J. Z. Hartmann, PLoS Computational Biology 7, e1001120 (2011)
2011
-
[4]
Hanke, et al., The Journal of Experimental Biology 213, 2665 (2010)
W. Hanke, et al., The Journal of Experimental Biology 213, 2665 (2010)
2010
-
[5]
Mammano, R
F. Mammano, R. Nobili, The Journal of the Acoustical Society of America 93, 3320 (1993)
1993
-
[6]
Pravin, D
S. Pravin, D. Mellon, E. J. Berger, M. A. Reidenbach, Bioinspiration & Biomimetics 10, 036006 (2015)
2015
-
[7]
J. Wu, T. E. Miller, A. Cicirello, G. Taylor, B. Mortimer, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 482, 20250678 (2026)
2026
-
[8]
Ghazi-Zahedi, J
K. Ghazi-Zahedi, J. Rieffel, S. Schmitt, H. Hauser, Frontiers in Robotics and AI 8 (2021)
2021
-
[9]
Pfeifer, H
R. Pfeifer, H. G. Marques, F. Iida, IJCAI (2013), vol. 2013, pp. 3–9
2013
-
[10]
N. H. Nguyen, V . A. Ho, Soft Robotics 9, 135 (2022). 27
2022
-
[11]
V ollrath, T
F. V ollrath, T. Krink, Journal of The Royal Society Interface 17, 20200569 (2020)
2020
-
[12]
LeCun, Y
Y . LeCun, Y . Bengio, G. Hinton, Nature 521, 436 (2015)
2015
-
[13]
Iskandar, A
M. Iskandar, A. Albu-Sch¨ affer, A. Dietrich, Science Robotics 9, eadn4008 (2024)
2024
-
[14]
G. Li, R. Wang, P . Xu, Q. Y e, J. Chen, IEEE Robotics & Automation Magazine pp. 2–16 (2025)
2025
-
[15]
Li, et al., Nature Sensors 1, 52 (2026)
S. Li, et al., Nature Sensors 1, 52 (2026)
2026
-
[16]
P . Jiao, J. Mueller, J. R. Raney, X. R. Zheng, A. H. Alavi, Nature Communications 14, 6004 (2023)
2023
-
[17]
L. G. Wright, et al., Nature 601, 549 (2022)
2022
-
[18]
Wetzstein, et al., Nature 588, 39 (2020)
G. Wetzstein, et al., Nature 588, 39 (2020)
2020
-
[19]
Xue, et al., Nature 632, 280 (2024)
Z. Xue, et al., Nature 632, 280 (2024)
2024
-
[20]
Bertoldi, V
K. Bertoldi, V . Vitelli, J. Christensen, M. V an Hecke, Nature Reviews Materials 2, 17066 (2017)
2017
-
[21]
Kadic, G
M. Kadic, G. W. Milton, M. van Hecke, M. Wegener, Nature Reviews Physics 1, 198 (2019)
2019
-
[22]
Bordiga, et al., Nature Materials pp
G. Bordiga, et al., Nature Materials pp. 1–9 (2024)
2024
-
[23]
Bertoldi, P
K. Bertoldi, P . M. Reis, S. Willshaw, T. Mullin, Advanced Materials 22, 361 (2010)
2010
-
[24]
Mullin, S
T. Mullin, S. Deschanel, K. Bertoldi, M. C. Boyce, Physical Review Letters 99, 084301 (2007)
2007
-
[25]
B. Deng, J. Raney, V . Tournat, K. Bertoldi, Physical review letters 118, 204102 (2017). 28
2017
-
[26]
B. Deng, P . Wang, Q. He, V . Tournat, K. Bertoldi, Nature communications 9, 3410 (2018)
2018
-
[27]
Coulais, J
C. Coulais, J. T. Overvelde, L. A. Lubbers, K. Bertoldi, M . V an Hecke, Physical Review Letters 115, 044301 (2015)
2015
-
[28]
B. Deng, S. Y u, A. E. Forte, V . Tournat, K. Bertoldi, Proceed- ings of the National Academy of Sciences 117, 31002 (2020). eprint: https://www.pnas.org/doi/pdf/10.1073/pnas.2015847117
-
[29]
Deng, et al., Advanced Materials 34, 2206238 (2022)
B. Deng, et al., Advanced Materials 34, 2206238 (2022)
2022
-
[30]
Kiranyaz, et al., Mechanical Systems and Signal Processing 151, 107398 (2021)
S. Kiranyaz, et al., Mechanical Systems and Signal Processing 151, 107398 (2021)
2021
-
[31]
A. G. Baydin, B. A. Pearlmutter, A. A. Radul, J. M. Siskind , Journal of Machine Learning Research 18, 1 (2018)
2018
-
[32]
Blondel, et al
M. Blondel, et al. , Advances in neural information processing systems , S. Koyejo, et al. , eds. (Curran Associates, Inc., 2022), vol. 35, pp. 5230–524 2
2022
-
[33]
Rajeswaran, C
A. Rajeswaran, C. Finn, S. M. Kakade, S. Levine, Advances in Neural Information Pro- cessing Systems (Curran Associates, Inc., 2019), vol. 32
2019
-
[34]
Sitti, Extreme Mechanics Letters 46, 101340 (2021)
M. Sitti, Extreme Mechanics Letters 46, 101340 (2021)
2021
-
[35]
Tanaka, et al., Neural Networks 115, 100 (2019)
G. Tanaka, et al., Neural Networks 115, 100 (2019)
2019
-
[36]
Cucchi, S
M. Cucchi, S. Abreu, G. Ciccone, D. Brunner, H. Kleemann, Neuromorphic Computing and Engineering 2, 032002 (2022)
2022
-
[37]
Y an, et al., Nature Communications 15, 2056 (2024)
M. Y an, et al., Nature Communications 15, 2056 (2024)
2056
-
[38]
Li, et al., ACM Trans
Y . Li, et al., ACM Trans. Graph. (2022). 29
2022
-
[39]
Du, et al., ACM Trans
T. Du, et al., ACM Trans. Graph. 41 (2021)
2021
-
[40]
Xu, et al., Proceedings of Robotics: Science and Systems (Virtual, 2021)
J. Xu, et al., Proceedings of Robotics: Science and Systems (Virtual, 2021)
2021
-
[41]
Huang, D
Z. Huang, D. Panozzo, D. Zorin, ACM Trans. Graph. 43 (2024)
2024
-
[42]
Bradbury, et al., JAX: composable transformations of Python+NumPy program s (2018)
J. Bradbury, et al., JAX: composable transformations of Python+NumPy program s (2018)
2018
-
[43]
Kidger, On Neural Differential Equations, phd, Unive rsity of Oxford (2021)
P . Kidger, On Neural Differential Equations, phd, Unive rsity of Oxford (2021)
2021
-
[44]
Tsitouras, Computers & Mathematics with Applications 62, 770 (2011)
C. Tsitouras, Computers & Mathematics with Applications 62, 770 (2011)
2011
-
[45]
D. P . Kingma, J. Ba, International Conference on Learning Representations (ICLR) (2015). 30
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.