SPACE: Unifying Symmetric and Asymmetric Routing Problems for Generalist Neural Solver
Pith reviewed 2026-06-30 13:30 UTC · model grok-4.3
The pith
A pivot-based embedding unifies symmetric and asymmetric vehicle routing in one neural model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
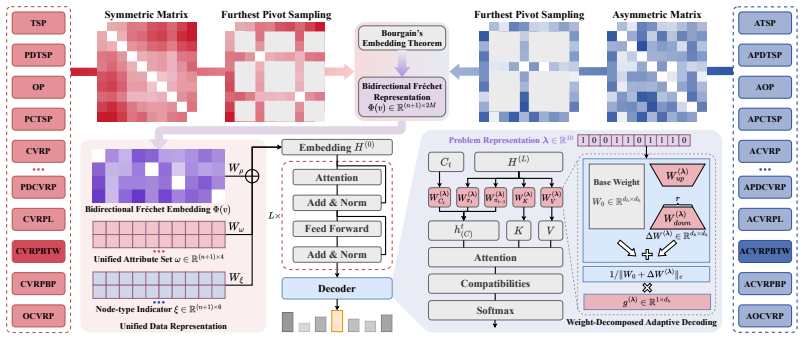
By constructing a bidirectional Frechet representation through furthest pivot sampling and pairing it with weight-decomposed adaptive decoding, the SPACE framework produces node embeddings that remain invariant across symmetric and asymmetric VRPs and decouples geometry perception from problem-specific constraints, allowing one trained model to generate solutions for both problem types.
What carries the argument
Spatial Pivot-Aligned Coordinate-free Embedding (SPACE) that builds invariant node representations from bidirectional Frechet distances to furthest pivots.
If this is right
- One trained network can solve any mix of symmetric and asymmetric routing instances without retraining.
- Real-world routing applications that contain both symmetric and asymmetric distance data become addressable by a single model.
- Constraint decisions no longer overfit to one geometry type because the decoder separates geometry from problem rules.
- Zero-shot transfer holds across the 55 symmetric-asymmetric pairs tested.
Where Pith is reading between the lines
- The same pivot-sampling idea could be tested on other combinatorial problems that have symmetric and asymmetric distance versions, such as the traveling salesman problem.
- If the embedding truly erases symmetry information, it may allow models to handle distance matrices that are only partially observed or noisy.
- The adaptive decoding step might be reused in other neural combinatorial solvers to reduce geometry-specific overfitting.
Load-bearing premise
The furthest pivot sampling strategy produces node representations that stay unchanged when the distance matrix is made asymmetric.
What would settle it
Compute node embeddings on a symmetric VRP instance and on its asymmetric counterpart using the same pivots; if the embeddings differ by more than a small fixed threshold, the invariance claim fails.
Figures
read the original abstract
Generalist neural routing solvers have shown great potential in solving diverse vehicle routing problems (VRPs) with a unified model. However, existing solvers are typically limited to symmetric settings or degrade in performance when switching to asymmetric settings due to input inconsistencies or inherent structural differences, substantially limiting their practicality in real-world scenarios that encompass both scenarios. To address this limitation, we define the spatial position of each node based on the relative distances to a specific set of pivots and further propose a Spatial Pivot-Aligned Coordinate-free Embedding (SPACE) framework that unifies node representation and solution generation across symmetric and asymmetric VRPs. Specifically, we construct a bidirectional Frechet representation using a novel furthest pivot sampling strategy to enable invariant node representations across distinct problem settings. Furthermore, we introduce a weight-decomposed adaptive decoding mechanism that decouples geometric perception from problem representations, mitigating the overfitting of constraint decisions to a specific geometry setting. Extensive experiments on 110 VRP variants, comprising 55 symmetric problems and their asymmetric counterparts, demonstrate that SPACE achieves promising zero-shot generalization in both symmetric and asymmetric VRPs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the SPACE framework to unify symmetric and asymmetric vehicle routing problems (VRPs) within a single generalist neural solver. It introduces a Spatial Pivot-Aligned Coordinate-free Embedding that represents each node via relative distances to a set of pivots, constructs a bidirectional Fréchet representation using a furthest-pivot sampling strategy to achieve invariance across problem types, and adds a weight-decomposed adaptive decoding mechanism to separate geometric perception from constraint decisions. Experiments across 110 VRP variants (55 symmetric problems and their asymmetric counterparts) are reported to demonstrate promising zero-shot generalization.
Significance. If the empirical results hold under scrutiny, the work would be a meaningful step toward practical generalist solvers, as it directly targets the performance drop that occurs when symmetric-trained models are applied to asymmetric instances. The coordinate-free pivot-based embedding and decoupled decoding are technically interesting contributions to the literature on invariant representations for routing problems.
major comments (2)
- [Method] Method section (bidirectional Fréchet representation): the central claim that furthest-pivot sampling produces representations invariant to symmetry/asymmetry rests on the sampling procedure and the subsequent embedding construction; the manuscript should supply a formal argument or ablation showing that the invariance holds when the underlying distance matrix is asymmetric rather than merely reporting downstream performance.
- [Experiments] Experiments (110 variants): the zero-shot generalization claim is load-bearing for the paper's contribution; the text must clarify how the 55 asymmetric counterparts were constructed (e.g., directed vs. undirected edge weights) and report per-variant gap-to-optimum or gap-to-baseline numbers rather than aggregate “promising” statements.
minor comments (2)
- [Method] Notation: the definition of the pivot set and the exact form of the bidirectional Fréchet distance should be stated with explicit equations rather than prose descriptions.
- Figure clarity: the diagram illustrating the furthest-pivot sampling strategy would benefit from an accompanying algorithmic pseudocode box.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and constructive feedback on our manuscript. We address the major comments below and will incorporate the suggested revisions.
read point-by-point responses
-
Referee: [Method] Method section (bidirectional Fréchet representation): the central claim that furthest-pivot sampling produces representations invariant to symmetry/asymmetry rests on the sampling procedure and the subsequent embedding construction; the manuscript should supply a formal argument or ablation showing that the invariance holds when the underlying distance matrix is asymmetric rather than merely reporting downstream performance.
Authors: We appreciate this point. While the furthest-pivot sampling is designed to select pivots that maximize coverage in the distance space, we acknowledge that a formal proof of invariance under asymmetry was not provided. We will add an ablation study comparing the representation stability on symmetric vs. asymmetric instances, and include a brief theoretical argument based on the properties of the Fréchet distance in the revised manuscript. revision: yes
-
Referee: [Experiments] Experiments (110 variants): the zero-shot generalization claim is load-bearing for the paper's contribution; the text must clarify how the 55 asymmetric counterparts were constructed (e.g., directed vs. undirected edge weights) and report per-variant gap-to-optimum or gap-to-baseline numbers rather than aggregate “promising” statements.
Authors: We agree that more detail is needed. The asymmetric counterparts were constructed by introducing directed edge weights with a controlled asymmetry factor (details in Section 4.1). In the revision, we will clarify this construction process and include per-variant performance tables or figures showing gaps to optimum for each of the 110 variants, replacing the aggregate summaries. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces a novel SPACE framework, including a bidirectional Fréchet representation via furthest-pivot sampling and a weight-decomposed adaptive decoding mechanism, as original constructions to achieve invariant node representations across symmetric and asymmetric VRPs. These are presented as new proposals rather than reductions of outputs to inputs by definition or fitting. The central generalization claim rests on the experimental results across 110 variants, with no load-bearing self-citations, self-definitional loops, or renamed known results evident in the provided abstract and description. The derivation chain is self-contained as a proposed architecture tested empirically.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Node spatial positions can be defined based on relative distances to a specific set of pivots
invented entities (3)
-
Spatial Pivot-Aligned Coordinate-free Embedding (SPACE)
no independent evidence
-
bidirectional Frechet representation
no independent evidence
-
weight-decomposed adaptive decoding mechanism
no independent evidence
Reference graph
Works this paper leans on
-
[1]
A systematic literature review of the vehicle routing problem in reverse logistics operations.Computers & Industrial Engineering, 177:109011, 2023
Kubra Sar and Pezhman Ghadimi. A systematic literature review of the vehicle routing problem in reverse logistics operations.Computers & Industrial Engineering, 177:109011, 2023
2023
-
[2]
An extension of the lin-kernighan-helsgaun tsp solver for constrained traveling salesman and vehicle routing problems.Roskilde: Roskilde University, 12, 2017
Keld Helsgaun. An extension of the lin-kernighan-helsgaun tsp solver for constrained traveling salesman and vehicle routing problems.Roskilde: Roskilde University, 12, 2017
2017
-
[3]
Hybrid genetic search for the cvrp: Open-source implementation and swap* neighborhood
Thibaut Vidal. Hybrid genetic search for the cvrp: Open-source implementation and swap* neighborhood. Computers & Operations Research, 140:105643, 2022
2022
-
[4]
Machine learning for combinatorial optimization: a methodological tour d’horizon.European Journal of Operational Research, 290(2):405–421, 2021
Yoshua Bengio, Andrea Lodi, and Antoine Prouvost. Machine learning for combinatorial optimization: a methodological tour d’horizon.European Journal of Operational Research, 290(2):405–421, 2021
2021
-
[5]
Survey on neural routing solvers.arXiv preprint arXiv:2602.21761, 2026
Yunpeng Ba, Xi Lin, Changliang Zhou, Ruihao Zheng, Zhenkun Wang, Xinyan Liang, Zhichao Lu, Jianyong Sun, Yuhua Qian, and Qingfu Zhang. Survey on neural routing solvers.arXiv preprint arXiv:2602.21761, 2026
-
[6]
Chaitanya K Joshi, Thomas Laurent, and Xavier Bresson. An efficient graph convolutional network technique for the travelling salesman problem.arXiv preprint arXiv:1906.01227, 2019
-
[7]
Yang Li, Jinpei Guo, Runzhong Wang, Hongyuan Zha, and Junchi Yan. Fast t2t: Optimization consistency speeds up diffusion-based training-to-testing solving for combinatorial optimization.Advances in Neural Information Processing Systems, 37:30179–30206, 2024
2024
-
[8]
Pomo: Policy optimization with multiple optima for reinforcement learning.Advances in Neural Information Processing Systems, 33:21188–21198, 2020
Yeong-Dae Kwon, Jinho Choo, Byoungjip Kim, Iljoo Yoon, Youngjune Gwon, and Seungjai Min. Pomo: Policy optimization with multiple optima for reinforcement learning.Advances in Neural Information Processing Systems, 33:21188–21198, 2020
2020
-
[9]
Instance- conditioned adaptation for large-scale generalization of neural routing solver.IEEE Transactions on Intelligent Transportation Systems, 2026
Changliang Zhou, Xi Lin, Zhenkun Wang, Xialiang Tong, Mingxuan Yuan, and Qingfu Zhang. Instance- conditioned adaptation for large-scale generalization of neural routing solver.IEEE Transactions on Intelligent Transportation Systems, 2026
2026
-
[10]
Multi-task learning for routing problem with cross-problem zero-shot generalization
Fei Liu, Xi Lin, Zhenkun Wang, Qingfu Zhang, Tong Xialiang, and Mingxuan Yuan. Multi-task learning for routing problem with cross-problem zero-shot generalization. InProceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 1898–1908, 2024
1908
-
[11]
Mvmoe: multi-task vehicle routing solver with mixture-of-experts
Jianan Zhou, Zhiguang Cao, Yaoxin Wu, Wen Song, Yining Ma, Jie Zhang, and Chi Xu. Mvmoe: multi-task vehicle routing solver with mixture-of-experts. InProceedings of the 41st International Conference on Machine Learning, pages 61804–61824, 2024
2024
-
[12]
Cross-problem learning for solving vehicle routing problems
Zhuoyi Lin, Yaoxin Wu, Bangjian Zhou, Zhiguang Cao, Wen Song, Yingqian Zhang, and Senthilnath Jayavelu. Cross-problem learning for solving vehicle routing problems. InProceedings of the Thirty-Third International Joint Conference on Artificial Intelligence, pages 6958–6966, 2024
2024
-
[13]
Goal: A generalist combinatorial optimization agent learner
Darko Drakulic, Sofia Michel, and Jean-Marc Andreoli. Goal: A generalist combinatorial optimization agent learner. InThe Thirteenth International Conference on Learning Representations, 2025. 10
2025
-
[14]
URS: A Unified Neural Routing Solver for Cross-Problem Zero-Shot Generalization
Changliang Zhou, Canhong Yu, Shunyu Yao, Xi Lin, Zhenkun Wang, Yu Zhou, and Qingfu Zhang. Urs: A unified neural routing solver for cross-problem zero-shot generalization.arXiv preprint arXiv:2509.23413, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[15]
Drone-based delivery systems: A survey on route planning.Ieee Access, 11:123476–123504, 2023
Giulio Attenni, Viviana Arrigoni, Novella Bartolini, and Gaia Maselli. Drone-based delivery systems: A survey on route planning.Ieee Access, 11:123476–123504, 2023
2023
-
[16]
Neural combinatorial optimization for real-world routing.arXiv preprint arXiv:2503.16159, 2025
Jiwoo Son, Zhikai Zhao, Federico Berto, Chuanbo Hua, Changhyun Kwon, and Jinkyoo Park. Neural combinatorial optimization for real-world routing.arXiv preprint arXiv:2503.16159, 2025
-
[17]
On lipschitz embedding of finite metric spaces in hilbert space.Israel Journal of Mathematics, 52(1):46–52, 1985
Jean Bourgain. On lipschitz embedding of finite metric spaces in hilbert space.Israel Journal of Mathematics, 52(1):46–52, 1985
1985
-
[18]
On quasi-metric spaces.American Journal of Mathematics, 53(3):675–684, 1931
Wallace Alvin Wilson. On quasi-metric spaces.American Journal of Mathematics, 53(3):675–684, 1931
1931
-
[19]
SIAM, 2002
Paolo Toth and Daniele Vigo.The vehicle routing problem. SIAM, 2002
2002
-
[20]
Neural combinatorial optimization with heavy decoder: Toward large scale generalization
Fu Luo, Xi Lin, Fei Liu, Qingfu Zhang, and Zhenkun Wang. Neural combinatorial optimization with heavy decoder: Toward large scale generalization. InThirty-seventh Conference on Neural Information Processing Systems, 2023
2023
-
[21]
Attention, learn to solve routing problems! In International Conference on Learning Representations, 2019
Wouter Kool, Herke van Hoof, and Max Welling. Attention, learn to solve routing problems! In International Conference on Learning Representations, 2019
2019
-
[22]
Rethinking light decoder-based solvers for vehicle routing problems.International Conference on Learning Representations, 2025
Ziwei Huang, Jianan Zhou, Zhiguang Cao, and Yixin Xu. Rethinking light decoder-based solvers for vehicle routing problems.International Conference on Learning Representations, 2025
2025
-
[23]
Matrix encoding networks for neural combinatorial optimization.Advances in Neural Information Processing Systems, 34:5138–5149, 2021
Yeong-Dae Kwon, Jinho Choo, Iljoo Yoon, Minah Park, Duwon Park, and Youngjune Gwon. Matrix encoding networks for neural combinatorial optimization.Advances in Neural Information Processing Systems, 34:5138–5149, 2021
2021
-
[24]
Bq-nco: Bisimulation quotienting for efficient neural combinatorial optimization
Darko Drakulic, Sofia Michel, Florian Mai, Arnaud Sors, and Jean-Marc Andreoli. Bq-nco: Bisimulation quotienting for efficient neural combinatorial optimization. InThirty-seventh Conference on Neural Information Processing Systems, 2023
2023
-
[25]
Attention is all you need.Advances in Neural Information Processing Systems, 30, 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need.Advances in Neural Information Processing Systems, 30, 2017
2017
-
[26]
Springer Science & Business Media, 2013
Jiri Matousek.Lectures on discrete geometry, volume 212. Springer Science & Business Media, 2013
2013
-
[27]
Dora: Weight-decomposed low-rank adaptation
Shih-Yang Liu, Chien-Yi Wang, Hongxu Yin, Pavlo Molchanov, Yu-Chiang Frank Wang, Kwang-Ting Cheng, and Min-Hung Chen. Dora: Weight-decomposed low-rank adaptation. InForty-first International Conference on Machine Learning, 2024
2024
-
[29]
Simple statistical gradient-following algorithms for connectionist reinforcement learning.Machine Learning, 8:229–256, 1992
Ronald J Williams. Simple statistical gradient-following algorithms for connectionist reinforcement learning.Machine Learning, 8:229–256, 1992
1992
-
[30]
Routefinder: Towards foundation models for vehicle routing problems.Transactions on Machine Learning Research, 2025
Federico Berto, Chuanbo Hua, Nayeli Gast Zepeda, André Hottung, Niels Wouda, Leon Lan, Junyoung Park, Kevin Tierney, and Jinkyoo Park. Routefinder: Towards foundation models for vehicle routing problems.Transactions on Machine Learning Research, 2025
2025
-
[31]
Cada: Cross-problem routing solver with constraint-aware dual-attention
Han Li, Fei Liu, Zhi Zheng, Yu Zhang, and Zhenkun Wang. Cada: Cross-problem routing solver with constraint-aware dual-attention. InProceedings of the 42nd International Conference on Machine Learning, 2025
2025
-
[32]
New benchmark instances for the capacitated vehicle routing problem.European Journal of Operational Research, 257(3):845–858, 2017
Eduardo Uchoa, Diego Pecin, Artur Pessoa, Marcus Poggi, Thibaut Vidal, and Anand Subramanian. New benchmark instances for the capacitated vehicle routing problem.European Journal of Operational Research, 257(3):845–858, 2017
2017
-
[33]
Efficiently solving very large-scale routing problems.Computers & operations research, 107:32–42, 2019
Florian Arnold, Michel Gendreau, and Kenneth Sörensen. Efficiently solving very large-scale routing problems.Computers & operations research, 107:32–42, 2019
2019
-
[34]
Pointer networks.Advances in Neural Information Processing Systems, 28, 2015
Oriol Vinyals, Meire Fortunato, and Navdeep Jaitly. Pointer networks.Advances in Neural Information Processing Systems, 28, 2015. 11
2015
-
[35]
Neural Combinatorial Optimization with Reinforcement Learning
Irwan Bello, Hieu Pham, Quoc V Le, Mohammad Norouzi, and Samy Bengio. Neural combinatorial optimization with reinforcement learning.arXiv preprint arXiv:1611.09940, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[36]
Reinforcement learning for solving the vehicle routing problem.Advances in Neural Information Processing Systems, 31, 2018
Mohammadreza Nazari, Afshin Oroojlooy, Lawrence Snyder, and Martin Takác. Reinforcement learning for solving the vehicle routing problem.Advances in Neural Information Processing Systems, 31, 2018
2018
-
[37]
Step-wise deep learning models for solving routing problems.IEEE Transactions on Industrial Informatics, 17(7):4861–4871, 2020
Liang Xin, Wen Song, Zhiguang Cao, and Jie Zhang. Step-wise deep learning models for solving routing problems.IEEE Transactions on Industrial Informatics, 17(7):4861–4871, 2020
2020
-
[38]
Sym-nco: Leveraging symmetricity for neural combinatorial optimization.Advances in Neural Information Processing Systems, 35:1936–1949, 2022
Minsu Kim, Junyoung Park, and Jinkyoo Park. Sym-nco: Leveraging symmetricity for neural combinatorial optimization.Advances in Neural Information Processing Systems, 35:1936–1949, 2022
1936
-
[39]
Towards omni-generalizable neural methods for vehicle routing problems
Jianan Zhou, Yaoxin Wu, Wen Song, Zhiguang Cao, and Jie Zhang. Towards omni-generalizable neural methods for vehicle routing problems. InInternational Conference on Machine Learning, 2023
2023
-
[40]
Invit: A generalizable routing problem solver with invariant nested view transformer
Han Fang, Zhihao Song, Paul Weng, and Yutong Ban. Invit: A generalizable routing problem solver with invariant nested view transformer. InInternational Conference on Machine Learning, 2024
2024
-
[41]
Learning to Reduce Search Space for Generalizable Neural Routing Solver
Changliang Zhou, Xi Lin, Zhenkun Wang, and Qingfu Zhang. Learning to reduce search space for generalizable neural routing solver.arXiv preprint arXiv:2503.03137, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[42]
Improving generalization of neural combinatorial optimization for vehicle routing problems via test-time projection learning.Advances in Neural Information Processing Systems, 2025
Yuanyao Chen, Rongsheng Chen, Fu Luo, and Zhenkun Wang. Improving generalization of neural combinatorial optimization for vehicle routing problems via test-time projection learning.Advances in Neural Information Processing Systems, 2025
2025
-
[43]
Towards generalizable neural solvers for vehicle routing problems via ensemble with transferrable local policy
Chengrui Gao, Haopu Shang, Ke Xue, Dong Li, and Chao Qian. Towards generalizable neural solvers for vehicle routing problems via ensemble with transferrable local policy. InInternational Joint Conference on Artificial Intelligence, 2024
2024
-
[44]
Boosting neural combinatorial optimization for large-scale vehicle routing problems
Fu Luo, Xi Lin, Yaoxin Wu, Zhenkun Wang, Tong Xialiang, Mingxuan Yuan, and Qingfu Zhang. Boosting neural combinatorial optimization for large-scale vehicle routing problems. InThe Thirteenth International Conference on Learning Representations, 2025
2025
-
[45]
Udc: A unified neural divide-and-conquer framework for large-scale combinatorial optimization problems
Zhi Zheng, Changliang Zhou, Tong Xialiang, Mingxuan Yuan, and Zhenkun Wang. Udc: A unified neural divide-and-conquer framework for large-scale combinatorial optimization problems. InThirty-eighth Conference on Neural Information Processing Systems, 2024
2024
-
[46]
Glop: Learning global partition and local construction for solving large-scale routing problems in real-time
Haoran Ye, Jiarui Wang, Helan Liang, Zhiguang Cao, Yong Li, and Fanzhang Li. Glop: Learning global partition and local construction for solving large-scale routing problems in real-time. InProceedings of the AAAI Conference on Artificial Intelligence, volume 38, pages 20284–20292, 2024
2024
-
[47]
Generalize a small pre-trained model to arbitrarily large tsp instances
Zhang-Hua Fu, Kai-Bin Qiu, and Hongyuan Zha. Generalize a small pre-trained model to arbitrarily large tsp instances. InProceedings of the AAAI Conference on Artificial Intelligence, volume 35, pages 7474–7482, 2021
2021
-
[48]
Dimes: A differentiable meta solver for combinatorial optimization problems.Advances in Neural Information Processing Systems, 35:25531–25546, 2022
Ruizhong Qiu, Zhiqing Sun, and Yiming Yang. Dimes: A differentiable meta solver for combinatorial optimization problems.Advances in Neural Information Processing Systems, 35:25531–25546, 2022
2022
-
[49]
T2t: From distribution learning in training to gradient search in testing for combinatorial optimization
Yang Li, Jinpei Guo, Runzhong Wang, and Junchi Yan. T2t: From distribution learning in training to gradient search in testing for combinatorial optimization. InThirty-seventh Conference on Neural Information Processing Systems, 2023
2023
-
[50]
Difusco: Graph-based diffusion solvers for combinatorial optimization
Zhiqing Sun and Yiming Yang. Difusco: Graph-based diffusion solvers for combinatorial optimization. Advances in Neural Information Processing Systems, 36:3706–3731, 2023
2023
-
[51]
Deep rein- forcement learning for solving the heterogeneous capacitated vehicle routing problem.IEEE Transactions on Cybernetics, 52(12):13572–13585, 2022
Jingwen Li, Yining Ma, Ruize Gao, Zhiguang Cao, Andrew Lim, Wen Song, and Jie Zhang. Deep rein- forcement learning for solving the heterogeneous capacitated vehicle routing problem.IEEE Transactions on Cybernetics, 52(12):13572–13585, 2022
2022
-
[52]
Deep reinforcement learning for solving vehicle routing problems with backhauls.IEEE Transactions on Neural Networks and Learning Systems, 36(3):4779–4793, 2024
Conghui Wang, Zhiguang Cao, Yaoxin Wu, Long Teng, and Guohua Wu. Deep reinforcement learning for solving vehicle routing problems with backhauls.IEEE Transactions on Neural Networks and Learning Systems, 36(3):4779–4793, 2024
2024
-
[53]
Dpn: Decoupling partition and navigation for neural solvers of min-max vehicle routing problems
Zhi Zheng, Shunyu Yao, Zhenkun Wang, Xialiang Tong, Mingxuan Yuan, and Ke Tang. Dpn: Decoupling partition and navigation for neural solvers of min-max vehicle routing problems. InProceedings of the 41st International Conference on Machine Learning, pages 61559–61592, 2024
2024
-
[54]
Unico: On unified combinatorial optimization via problem reduction to matrix-encoded general tsp
Wenzheng Pan, Hao Xiong, Jiale Ma, Wentao Zhao, Yang Li, and Junchi Yan. Unico: On unified combinatorial optimization via problem reduction to matrix-encoded general tsp. InThe Thirteenth International Conference on Learning Representations, 2025. 12
2025
-
[55]
Mtl-kd: Multi-task learning via knowledge distillation for generalizable neural vehicle routing solver.Advances in Neural Information Processing Systems, 2025
Yuepeng Zheng, Fu Luo, Zhenkun Wang, Yaoxin Wu, and Yu Zhou. Mtl-kd: Multi-task learning via knowledge distillation for generalizable neural vehicle routing solver.Advances in Neural Information Processing Systems, 2025
2025
-
[56]
Efficient training of multi-task neural solver for combinatorial optimization.Transactions on Machine Learning Research, 2025
Chenguang Wang, Zhang-Hua Fu, Pinyan Lu, and Tianshu Yu. Efficient training of multi-task neural solver for combinatorial optimization.Transactions on Machine Learning Research, 2025
2025
-
[57]
Heterogeneous attentions for solving pickup and delivery problem via deep reinforcement learning.IEEE Transactions on Intelligent Transportation Systems, 23(3):2306–2315, 2021
Jingwen Li, Liang Xin, Zhiguang Cao, Andrew Lim, Wen Song, and Jie Zhang. Heterogeneous attentions for solving pickup and delivery problem via deep reinforcement learning.IEEE Transactions on Intelligent Transportation Systems, 23(3):2306–2315, 2021
2021
-
[58]
Delving deep into rectifiers: Surpassing human-level performance on imagenet classification
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Delving deep into rectifiers: Surpassing human-level performance on imagenet classification. InProceedings of the IEEE international conference on computer vision, pages 1026–1034, 2015
2015
-
[59]
Pyvrp: A high-performance vrp solver package.INFORMS Journal on Computing, 36(4):943–955, 2024
Niels A Wouda, Leon Lan, and Wouter Kool. Pyvrp: A high-performance vrp solver package.INFORMS Journal on Computing, 36(4):943–955, 2024
2024
-
[60]
Or-tools, 2023
Laurent Perron and Vincent Furnon. Or-tools, 2023. URL https://developers.google.com/ optimization/
2023
-
[61]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 770–778, 2016
2016
-
[62]
Instance Normalization: The Missing Ingredient for Fast Stylization
Dmitry Ulyanov, Andrea Vedaldi, and Victor Lempitsky. Instance normalization: The missing ingredient for fast stylization.arXiv preprint arXiv:1607.08022, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[63]
Efficient backprop
Yann LeCun, Léon Bottou, Genevieve B Orr, and Klaus-Robert Müller. Efficient backprop. InNeural networks: Tricks of the trade, pages 9–50. Springer, 2002. 13 A Related Work A.1 Specialist Neural Solvers for Symmetric VRPs Symmetric VRPs constitute the primary focus of neural routing research. Since the seminal applica- tion of Ptr-Nets to the TSP [34, 35]...
2002
-
[64]
worst-case
The round-trip distance for a single-node route is thus capped at 2 √ 2≈2.82 . To ensure feasibility across all instances, we set the duration limit to L= 3.0 , consistent with the setting in Zhou et al. [11]. For asymmetric instances, we adopt the setting from Zhou et al. [14] and fix the duration limit atL= 0.6. Time Windows (TW)For symmetric instances,...
-
[65]
Rearranging gives d(vi, pm)−d(v j, pm)≤d(v i, vj)
Outgoing Component:By the triangle inequality, d(vi, pm)≤d(v i, vj)+d(v j, pm). Rearranging gives d(vi, pm)−d(v j, pm)≤d(v i, vj). Similarly, d(vj, pm)≤d(v j, vi) +d(v i, pm) implies d(vj, pm)−d(v i, pm)≤d(v j, vi). Combining these, we bound the absolute difference: |d(vi, pm)−d(v j, pm)| ≤max(d(v i, vj), d(vj, vi)) =D sym(vi, vj).(24)
-
[66]
distance
Incoming Component:By the triangle inequality, d(pm, vi)≤d(p m, vj)+d(v j, vi). Rearranging gives d(pm, vi)−d(p m, vj)≤d(v j, vi). Similarly, d(pm, vj)≤d(p m, vi) +d(v i, vj) implies d(pm, vj)−d(p m, vi)≤d(v i, vj). Thus, the absolute difference is also bounded: |d(pm, vi)−d(p m, vj)| ≤max(d(v j, vi), d(vi, vj)) =D sym(vi, vj).(25) Now, summing over allMp...
-
[67]
,min(N aug,|V customer|)}, we systematically seed the FPS with the depot set and theα-th customer from a fixed random permutation of the customer set Vcustomer
Phase 1 (Customer Traversal):For augmentations α∈ {1, . . . ,min(N aug,|V customer|)}, we systematically seed the FPS with the depot set and theα-th customer from a fixed random permutation of the customer set Vcustomer. This ensures that for small Naug, the model views the graph from maximally distinct vantage points
-
[68]
minimum redundancy
Phase 2 (Dual-Customer Seeding):If Naug >|V customer|, we exhaust single-customer seeds and transition to dual-customer seeding. We initialize Pinit with the depot set and two distinct customers selected at random. This increases the entropy of the initial geometric frame, generating further diverse embeddings for deep search. Given the resulting batch of...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.