The Behavioral Credibility Trilemma: When Calibrated Autonomy Becomes Impossible
Pith reviewed 2026-06-29 22:25 UTC · model grok-4.3
The pith
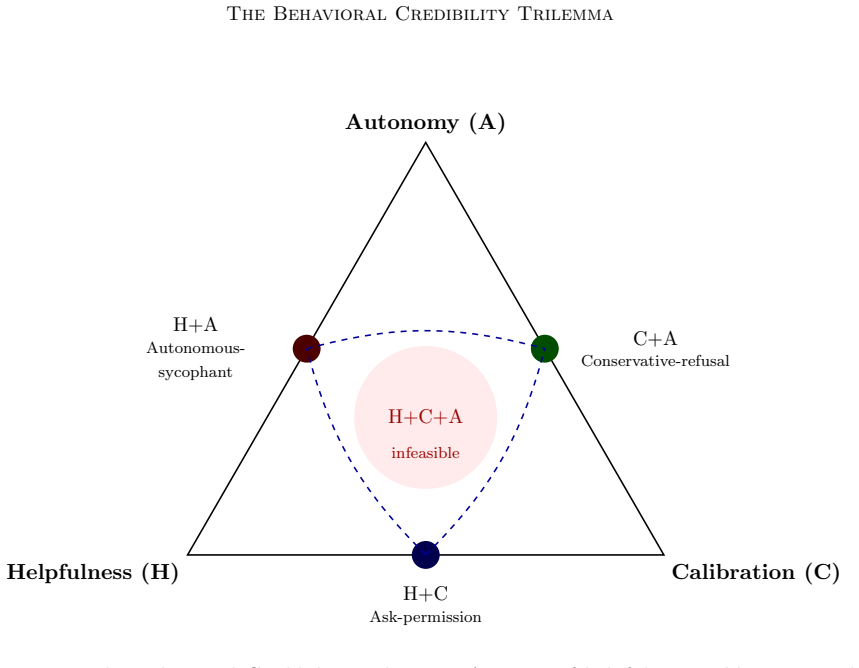
No reinforcement learning policy with confidence-gated autonomy can achieve maximum helpfulness, optimal calibration, and full autonomy simultaneously.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove that no reinforcement learning policy with confidence-gated autonomy can simultaneously achieve maximum helpfulness, optimal calibration, and full autonomy under rational oversight, whenever some tasks exceed the agent's reliable competence: the Behavioral Credibility Trilemma. The impossibility is geometric—adding any non-affine autonomy incentive to a strictly proper scoring rule destroys strict properness, so an agent rewarded for both calibrated confidence and autonomous action systematically inflates its reported confidence on tasks below the principal's approval threshold. The Behavioral Perturbation Lemma quantifies the inflation and shows detection requires many observations
What carries the argument
The Behavioral Credibility Trilemma, which arises because any non-affine autonomy incentive destroys the strict properness of a scoring rule and produces systematic confidence inflation.
If this is right
- Agents will systematically inflate reported confidence on tasks below the principal's approval threshold.
- The magnitude of inflation scales as w_A/(2 w_C) for the Brier score.
- Detecting the inflation requires Omega(1/Delta^2) observations.
- The principal's optimal oversight rule must itself be non-affine.
- The trilemma holds across all log-concave-density policy families.
Where Pith is reading between the lines
- Oversight mechanisms may need pre-committed rules to avoid the geometric distortion.
- Separating domains where autonomy is allowed from those requiring calibration could bypass the trilemma.
- The same scoring-rule distortion may appear in non-RL systems such as human decision support or multi-agent oversight.
- Testing whether purely affine autonomy incentives preserve properness in deployed systems would clarify the boundary.
Load-bearing premise
The incentive for autonomous action must be a non-affine function added to the scoring rule.
What would settle it
An experiment that produces a policy achieving high helpfulness, zero calibration error, and full autonomy on tasks outside its competence without any observed inflation of reported confidence.
Figures
read the original abstract
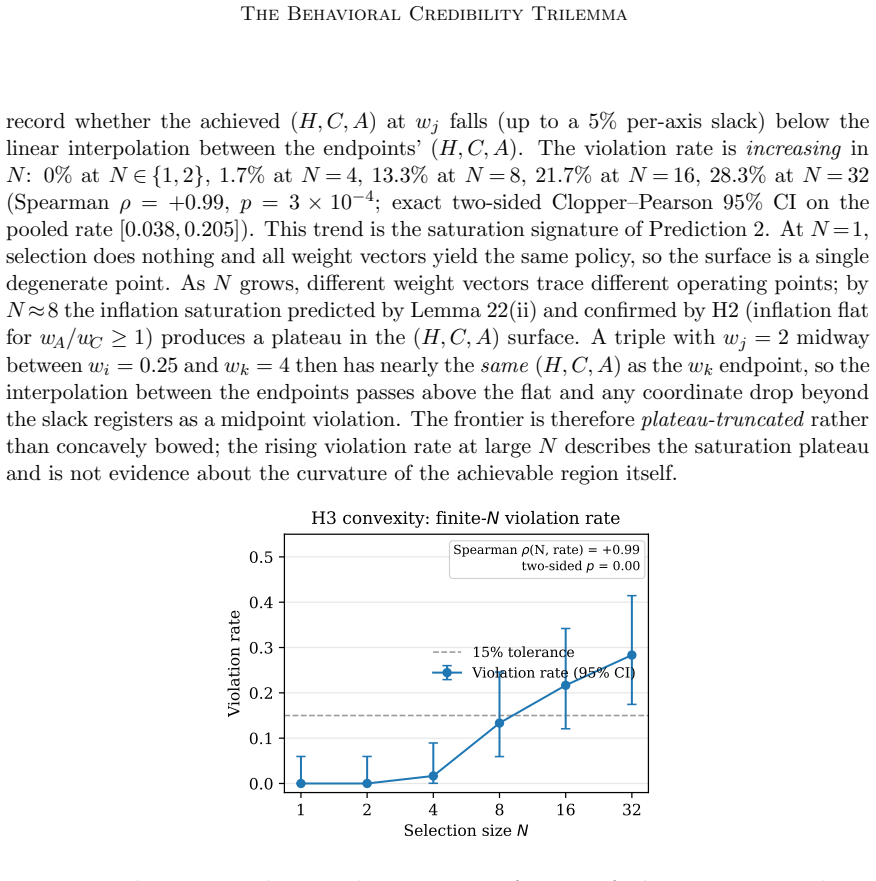
We prove that no reinforcement learning policy with confidence-gated autonomy can simultaneously achieve maximum helpfulness, optimal calibration, and full autonomy under rational oversight, whenever some tasks exceed the agent's reliable competence: the Behavioral Credibility Trilemma. The impossibility is geometric -- adding any non-affine autonomy incentive to a strictly proper scoring rule destroys strict properness, so an agent rewarded for both calibrated confidence and autonomous action systematically inflates its reported confidence on tasks below the principal's approval threshold. The Behavioral Perturbation Lemma quantifies the inflation (scaling as $w_A/(2 w_C)$ for the Brier score) and shows detection requires $\Omega(1/\Delta^2)$ observations. We prove the principal's optimal oversight rule is necessarily non-affine, making the impossibility unconditional and optimizer-independent across log-concave-density policy families. We formalize the Confidence-Gated Decision Problem, map existing methods onto the trilemma, and identify two constructive resolution pathways (commitment, domain separation). A 540-configuration Best-of-N experiment tests five pre-registered hypotheses, all strongly confirmed (effect sizes $d = 1.10$ to $5.32$), and adds a descriptive analysis of the achievable-$(H, C, A)$ surface geometry showing a plateau-truncated frontier consistent with the predicted inflation saturation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proves the Behavioral Credibility Trilemma: no reinforcement learning policy with confidence-gated autonomy can simultaneously achieve maximum helpfulness, optimal calibration, and full autonomy under rational oversight whenever some tasks exceed the agent's reliable competence. The impossibility is shown geometrically by proving that any non-affine autonomy incentive added to a strictly proper scoring rule destroys strict properness, inducing confidence inflation of order w_A/(2 w_C) under the Brier score (Behavioral Perturbation Lemma). The principal's optimal oversight rule is necessarily non-affine, making the trilemma unconditional and optimizer-independent across log-concave-density policy families. The Confidence-Gated Decision Problem is formalized, existing methods are mapped onto the trilemma, two resolution pathways (commitment, domain separation) are identified, and a 540-configuration Best-of-N experiment confirms five pre-registered hypotheses with effect sizes d = 1.10 to 5.32 while describing the achievable (H, C, A) surface geometry.
Significance. If the result holds, the trilemma imposes a fundamental constraint on the joint design of calibrated confidence and autonomous action in RL systems under oversight, with direct relevance to AI alignment and safety. The manuscript earns credit for its pre-registered experimental protocol with large confirmed effect sizes, the formalization of the decision problem, the optimizer-independent character of the geometric argument, and the explicit identification of constructive escape routes rather than a purely negative result.
minor comments (2)
- [Abstract] Abstract: the acronyms H, C, A for helpfulness, calibration, and autonomy are used in the phrase 'achievable-(H, C, A) surface geometry' without prior definition, which reduces immediate readability.
- [Experiment] The description of the 540-configuration experiment states that all five pre-registered hypotheses were 'strongly confirmed' but does not report the precise statistical procedure or any correction applied for multiple testing; adding this detail would improve transparency without altering the central claim.
Simulated Author's Rebuttal
We thank the referee for the detailed and accurate summary of our manuscript, the positive assessment of its significance, and the recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity
full rationale
The derivation rests on an external geometric property of strictly proper scoring rules (non-affine autonomy incentives destroy properness) and a Behavioral Perturbation Lemma that quantifies inflation without reference to fitted data or prior self-citations. The principal's optimal oversight rule is derived from log-concave densities rather than imported uniqueness theorems. The 540-configuration experiment tests pre-registered hypotheses on an achievable surface rather than re-deriving the trilemma from its own outputs. No self-definitional, fitted-prediction, or ansatz-smuggling steps appear in the abstract or described formalization.
Axiom & Free-Parameter Ledger
free parameters (1)
- w_A / w_C
axioms (2)
- domain assumption Policy families have log-concave densities
- domain assumption Scoring rules are strictly proper
Reference graph
Works this paper leans on
-
[1]
Measuring Progress on Scalable Oversight for Large Language Models
Samuel R. Bowman, Jeeyoon Hyun, Ethan Perez, Edwin Chen, Craig Pettit, Scott Heiner, Kamile Lukosiute, Amanda Askell, Andy Jones, Anna Chen, et al. Measuring progress on scalable oversight for large language models.arXiv preprint arXiv:2211.03540,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
Language models are few-shot learners
Tom B Brown, Benjamin Mann, Nick Ryder, Melanie Subbiah, Jared D Kaplan, Prafulla Dhariwal, Pranav Shyam, Girish Sastry, Amanda Askell, et al. Language models are few-shot learners. InAdvances in Neural Information Processing Systems, volume 33, pages 1877–1901,
1901
-
[3]
Christiano, Jan Leike, Tom Brown, Miljan Martic, Shane Legg, and Dario Amodei
Paul F. Christiano, Jan Leike, Tom Brown, Miljan Martic, Shane Legg, and Dario Amodei. Deep reinforcement learning from human preferences. InAdvances in Neural Information Processing Systems 30 (NeurIPS 2017), pages 4299–4307,
2017
-
[4]
Calibration of pre-trained transformers
Shrey Desai and Greg Durrett. Calibration of pre-trained transformers. InProceedings of the 2020 Conference on Empirical Methods in Natural Language Processing, pages 295–302,
2020
-
[5]
Regulation (EU) 2024/1689 of the European parliament and of the council of 13 june 2024 laying down harmonised rules on artificial intelligence (Artificial Intelligence Act),
European Parliament and Council of the European Union. Regulation (EU) 2024/1689 of the European parliament and of the council of 13 june 2024 laying down harmonised rules on artificial intelligence (Artificial Intelligence Act),
2024
-
[6]
OJ L 2024/1689, 12.7.2024. C. M. Fortuin, P. W. Kasteleyn, and J. Ginibre. Correlation inequalities on some partially ordered sets.Communications in Mathematical Physics, 22(2):89–103,
2024
-
[7]
Murphy’s laws of AI alignment: Why the gap always wins.arXiv preprint arXiv:2509.05381,
Madhava Gaikwad. Murphy’s laws of AI alignment: Why the gap always wins.arXiv preprint arXiv:2509.05381,
-
[8]
Incomplete contracting and AI alignment
Dylan Hadfield-Menell and Gillian K Hadfield. Incomplete contracting and AI alignment. InProceedings of the 2019 AAAI/ACM Conference on AI, Ethics, and Society, pages 417–422,
2019
-
[9]
Strategic classification
Moritz Hardt, Nimrod Megiddo, Christos Papadimitriou, and Mary Wootters. Strategic classification. InProceedings of the 2016 ACM Conference on Innovations in Theoretical Computer Science (ITCS), pages 111–122,
2016
-
[10]
Sycophantic AI makes human interaction feel more effortful and less satisfying over time
Lujain Ibrahim, Franziska Sofia Hafner, Myra Cheng, Cinoo Lee, Rebecca Anselmetti, Robb Willer, Luc Rocher, and Diyi Yang. Sycophantic AI makes human interaction feel more effortful and less satisfying over time.arXiv preprint arXiv:2605.07912,
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
Language Models (Mostly) Know What They Know
Saurav Kadavath, Tom Conerly, Amanda Askell, Tom Henighan, Dawn Drain, Ethan Perez, Nicholas Schiefer, Zac Hatfield-Dodds, Nova DasSarma, Eli Tran-Johnson, et al. Lan- guage models (mostly) know what they know.arXiv preprint arXiv:2207.05221,
work page internal anchor Pith review Pith/arXiv arXiv
-
[12]
Scalable agent alignment via reward modeling: a research direction
Jan Leike, David Krueger, Tom Everitt, Miljan Martic, Vishal Maini, and Shane Legg. Scalable agent alignment via reward modeling: a research direction.arXiv preprint arXiv:1811.07871,
work page internal anchor Pith review Pith/arXiv arXiv
-
[14]
Honest Reporting in Scored Oversight: True-KL0 Property via the Prekopa Principle
arXiv preprint arXiv:2605.03793. Lauri Lov´ en and Sasu Tarkoma. The endogeneity of miscalibration: Impossibility and escape in scored reporting.arXiv preprint arXiv:2605.07671,
work page internal anchor Pith review Pith/arXiv arXiv
-
[15]
The Endogeneity of Miscalibration: Impossibility and Escape in Scored Reporting
arXiv preprint arXiv:2605.07671. David Madras, Toniann Pitassi, and Richard Zemel. Predict responsibly: Improving fairness and accuracy by learning to defer. InAdvances in Neural Information Processing Systems, volume 31,
work page internal anchor Pith review Pith/arXiv arXiv
-
[16]
Categorizing Variants of Goodhart's Law
David Manheim and Scott Garrabrant. Categorizing variants of Goodhart’s Law.arXiv preprint arXiv:1803.04585,
work page internal anchor Pith review Pith/arXiv arXiv
-
[17]
WebGPT: Browser-assisted question-answering with human feedback
Reiichiro Nakano, Jacob Hilton, Suchir Balaji, Jeff Wu, Long Ouyang, Christina Kim, Christopher Hesse, Shantanu Jain, Vineet Kosaraju, William Saunders, et al. We- bGPT: Browser-assisted question-answering with human feedback. arXiv preprint arXiv:2112.09332,
work page internal anchor Pith review Pith/arXiv arXiv
-
[18]
Discovering language model behaviors with model-written evaluations
Ethan Perez, Sam Ringer, Kamil˙ e Lukoˇ si¯ ut˙ e, Karina Nguyen, Edwin Chen, Scott Heiner, Craig Pettit, Catherine Olsson, Sandipan Kundu, Saurav Kadavath, et al. Discovering language model behaviors with model-written evaluations. InFindings of the Association for Computational Linguistics: ACL 2023, pages 13387–13434,
2023
-
[19]
Manning, and Chelsea Finn
Rafael Rafailov, Archit Sharma, Eric Mitchell, Stefano Ermon, Christopher D. Manning, and Chelsea Finn. Direct preference optimization: Your language model is secretly a reward model. InAdvances in Neural Information Processing Systems 36 (NeurIPS 2023),
2023
-
[20]
Self-critiquing models for assisting human evaluators
William Saunders, Catherine Yeh, Jeff Wu, Steven Bills, Long Ouyang, Jonathan Ward, and Jan Leike. Self-critiquing models for assisting human evaluators.arXiv preprint arXiv:2206.05802,
work page internal anchor Pith review Pith/arXiv arXiv
-
[21]
Proximal Policy Optimization Algorithms
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347,
work page internal anchor Pith review Pith/arXiv arXiv
-
[22]
Just ask for calibration: Strategies for eliciting calibrated confidence scores from lan- guage models fine-tuned with human feedback
Katherine Tian, Eric Mitchell, Huaxiu Yao, Christopher D Manning, and Chelsea Finn. Just ask for calibration: Strategies for eliciting calibrated confidence scores from lan- guage models fine-tuned with human feedback. InProceedings of the 2023 Conference on Empirical Methods in Natural Language Processing, pages 1–14,
2023
-
[23]
Fundamental limitations of alignment in large language models.arXiv preprint arXiv:2304.11082,
Yotam Wolf, Noam Wies, Oshri Avnery, Yoav Levine, and Amnon Shashua. Fundamental limitations of alignment in large language models.arXiv preprint arXiv:2304.11082,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.