R5DGS: Semantic-Aware 4D Gaussian Splatting with Rigid Body Constraints for Efficient Dynamic Scene Reconstruction
Pith reviewed 2026-06-29 22:41 UTC · model grok-4.3
The pith
R5DGS augments 4D Gaussian Splatting with identity encodings and centroid-only rigid constraints to enable semantic querying and 11 FPS faster extrapolation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
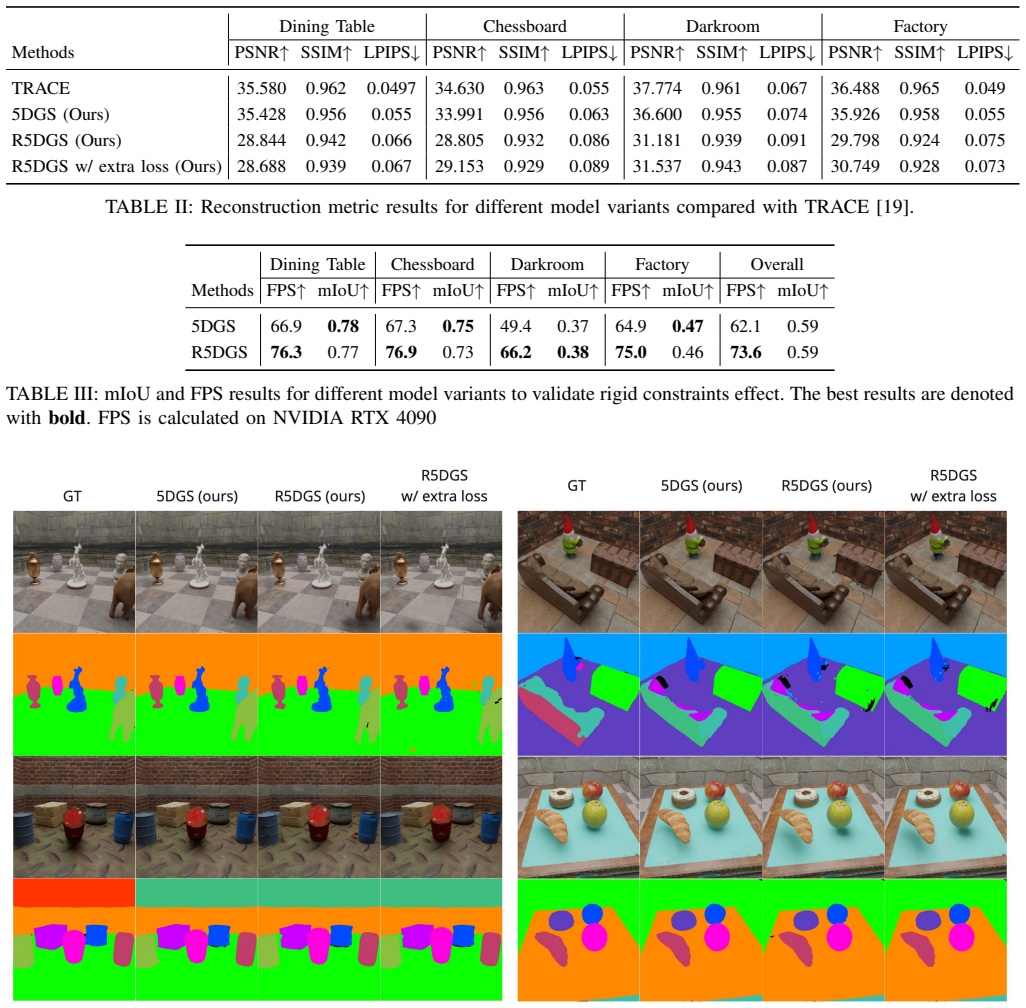
By augmenting a physics-driven 4D Gaussian representation with compact Identity Encoding vectors, the method enables precise Gaussian-to-object association via an offline CLIP-based object lookup table that supports open-vocabulary text prompting. The rigid-body inference constraint predicts and integrates physical dynamics exclusively for object centroids, propagating motion to associated Gaussians via relative transformations, yielding an 11 FPS speedup during extrapolation without compromising trajectories plausibility.
What carries the argument
Rigid-body inference constraint that predicts physical dynamics exclusively for object centroids and propagates motion to Gaussians via relative transformations, paired with Identity Encoding vectors for semantic object association.
If this is right
- Enables open-vocabulary text prompting to retrieve and render object-specific Gaussians across arbitrary timestamps and viewpoints.
- Delivers an 11 FPS speedup in the extrapolation phase while keeping trajectories plausible.
- Reduces overhead compared to per-Gaussian physics simulation in multi-view video reconstruction.
- Applies to foundational tasks in robotics, AR/VR, and digital twins by adding semantic control to 4D representations.
Where Pith is reading between the lines
- The centroid-only approach might extend to other non-rigid reconstruction pipelines to trade some accuracy for speed on rigid-dominant scenes.
- Identity encodings could combine with downstream language models for tasks like object-centric editing or question answering over reconstructed scenes.
- Testing the method on scenes with frequent object interactions would reveal whether the rigid propagation assumption breaks under strong external forces.
Load-bearing premise
Restricting physics simulation to object centroids and propagating motion through fixed relative transformations suffices to keep all Gaussian trajectories accurate and plausible in arbitrary dynamic scenes.
What would settle it
A dynamic scene containing non-rigid object deformation where the rendered Gaussians under centroid propagation show large trajectory or shape errors compared to ground-truth observations.
Figures
read the original abstract
Reconstructing and predicting dynamic 3D scenes from multi-view videos is a foundational task for robotics, AR/VR, and digital twins. Recent physics-informed Gaussian Splatting methods achieve impressive future frame extrapolation but lack semantic awareness and suffer from large computational overhead. We introduce $\textbf{R5DGS}$, a framework that augments a physics-driven 4D Gaussian representation with compact Identity Encoding vectors, enabling precise Gaussian-to-object association. By constructing an offline CLIP-based object lookup table, we support open-vocabulary text prompting to retrieve and render object-specific Gaussians across arbitrary timestamps and viewpoints. Furthermore, we propose a rigid-body inference constraint that predicts and integrates physical dynamics exclusively for object centroids, propagating motion to associated Gaussians via relative transformations. This optimization yields a 11 FPS speedup during extrapolation without compromising trajectories plausibility.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces R5DGS, a semantic-aware 4D Gaussian Splatting framework that augments physics-driven 4D Gaussians with Identity Encoding vectors for precise object association, supports open-vocabulary retrieval via an offline CLIP-based lookup table, and applies a rigid-body inference constraint that simulates physical dynamics only at object centroids before propagating motion to associated Gaussians via relative transformations. The central claim is that this yields an 11 FPS speedup during extrapolation without compromising trajectory plausibility.
Significance. If the speedup and plausibility claims are substantiated with quantitative evidence, the method could provide a practical route to lower computational cost in physics-informed dynamic reconstruction while adding semantic object control, which would be relevant for robotics and AR/VR applications.
major comments (2)
- [Abstract] Abstract: the claim of an 11 FPS speedup during extrapolation without compromising trajectories plausibility supplies no quantitative results, baselines, error metrics, or experimental details, leaving the central performance claim unsupported.
- [Abstract] Abstract: the rigid-body inference constraint that predicts dynamics exclusively for centroids and propagates via fixed relative transformations is load-bearing for the plausibility claim, yet the manuscript provides no evaluation on scenes containing non-rigid or articulated motion that would violate the constant-offset assumption.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We address each major comment below with specific plans for revision.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of an 11 FPS speedup during extrapolation without compromising trajectories plausibility supplies no quantitative results, baselines, error metrics, or experimental details, leaving the central performance claim unsupported.
Authors: The abstract is intended as a concise summary; the supporting quantitative evidence, including FPS measurements, trajectory error metrics (e.g., endpoint error and acceleration consistency), and comparisons against physics-informed baselines, appears in Section 4.3 and the associated tables. We agree the abstract would benefit from tighter linkage to these results and will revise it to include a parenthetical reference to the specific experimental validation (e.g., “yielding an 11 FPS speedup on the evaluated rigid-object sequences, as detailed in Sec. 4.3”). revision: yes
-
Referee: [Abstract] Abstract: the rigid-body inference constraint that predicts dynamics exclusively for centroids and propagates via fixed relative transformations is load-bearing for the plausibility claim, yet the manuscript provides no evaluation on scenes containing non-rigid or articulated motion that would violate the constant-offset assumption.
Authors: The method is explicitly built around the rigid-body prior (see title, Sec. 3.3, and the centroid-only dynamics formulation). All reported experiments use datasets whose objects satisfy this assumption. We acknowledge that scenes with non-rigid or articulated motion would violate the fixed relative transformation and constitute an important boundary case. We will add a dedicated limitations paragraph discussing this assumption, its implications for articulated objects, and suggested future extensions (e.g., per-part centroids). revision: yes
Circularity Check
No significant circularity; speedup reported as empirical outcome of modeling choice.
full rationale
The provided abstract and description present the rigid-body inference constraint as a deliberate modeling decision (physics only at centroids, propagation via fixed relative transformations) whose benefit is an observed 11 FPS speedup during extrapolation. No equations, derivations, or fitted parameters are shown that would reduce this speedup or the 'without compromising trajectories plausibility' claim to a self-referential definition, a renamed input, or a self-citation chain. The method is introduced as an augmentation to existing 4D Gaussian Splatting, with the speedup framed as a measured result of the optimization rather than a first-principles prediction forced by construction. No load-bearing self-citations, uniqueness theorems, or ansatzes smuggled via prior work appear in the text. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove,Deepsdf: Learning continuous signed distance functions for shape representation, 2019. arXiv:1901.05103 [cs.CV]. [Online]. Available: https://arxiv.org/abs/1901.05103
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[2]
Occupancy Networks: Learning 3D Reconstruction in Function Space
L. Mescheder, M. Oechsle, M. Niemeyer, S. Nowozin, and A. Geiger,Occupancy networks: Learning 3d reconstruction in function space, 2019. arXiv:1812. 03828 [cs.CV]. [Online]. Available:https:// arxiv.org/abs/1812.03828
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[3]
Mildenhall, P
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Bar- ron, R. Ramamoorthi, and R. Ng,Nerf: Representing scenes as neural radiance fields for view synthesis,
-
[4]
08934 [cs.CV]
arXiv:2003 . 08934 [cs.CV]. [Online]. Available:https : / / arxiv . org / abs / 2003 . 08934
2003
- [5]
-
[6]
A. Pumarola, E. Corona, G. Pons-Moll, and F. Moreno-Noguer,D-nerf: Neural radiance fields for dynamic scenes, 2020. arXiv:2011 . 13961 [cs.CV]. [Online]. Available:https://arxiv. org/abs/2011.13961
-
[7]
Park et al.,Nerfies: Deformable neural radiance fields, 2021
K. Park et al.,Nerfies: Deformable neural radiance fields, 2021. arXiv:2011 . 12948 [cs.CV]. [On- line]. Available:https : / / arxiv . org / abs / 2011.12948
-
[8]
Fast dynamic radiance fields with time-aware neural voxels,
J. Fang et al., “Fast dynamic radiance fields with time-aware neural voxels,” inSIGGRAPH Asia 2022 Conference Papers, ser. SA ’22, ACM, Nov. 2022, pp. 1–9.DOI:10 . 1145 / 3550469 . 3555383 [Online]. Available:http://dx.doi.org/10. 1145/3550469.3555383
- [9]
- [10]
-
[11]
Wu et al.,4d gaussian splatting for real-time dynamic scene rendering, 2024
G. Wu et al.,4d gaussian splatting for real-time dynamic scene rendering, 2024. arXiv:2310.08528 [cs.CV]. [Online]. Available:https://arxiv. org/abs/2310.08528
-
[12]
Deformable 3d gaussians for high- fidelity monocular dynamic scene reconstruction,
Z. Yang, X. Gao, W. Zhou, S. Jiao, Y . Zhang, and X. Jin, “Deformable 3d gaussians for high- fidelity monocular dynamic scene reconstruction,” arXiv preprint arXiv:2309.13101, 2023
-
[13]
Physics-informed neural networks: A deep learning framework for solving forward and inverse prob- lems involving nonlinear partial differential equa- tions,
“Physics-informed neural networks: A deep learning framework for solving forward and inverse prob- lems involving nonlinear partial differential equa- tions,”Journal of Computational physics, vol. 378, pp. 686–707, 2019
2019
- [14]
-
[15]
Neusmoke: Efficient smoke reconstruction and view synthesis with neural transportation fields,
J. Qiu, R. Cen, Z. Li, H. Yan, M.-M. Cheng, and B. Ren, “Neusmoke: Efficient smoke reconstruction and view synthesis with neural transportation fields,” in SIGGRAPH Asia Conference Proceedings, 2024
2024
-
[16]
X. Li et al.,Pac-nerf: Physics augmented continuum neural radiance fields for geometry-agnostic system identification, 2023. arXiv:2303.05512 [cs.CV]. [Online]. Available:https://arxiv.org/abs/ 2303.05512
-
[17]
L. Zhong, H.-X. Yu, J. Wu, and Y . Li,Reconstruction and simulation of elastic objects with spring-mass 3d gaussians, 2024. arXiv:2403 . 09434 [cs.CV]. [Online]. Available:https://arxiv.org/abs/ 2403.09434
-
[18]
Zhang et al.,Physdreamer: Physics-based inter- action with 3d objects via video generation, 2024
T. Zhang et al.,Physdreamer: Physics-based inter- action with 3d objects via video generation, 2024. arXiv:2404.13026 [cs.CV]. [Online]. Available: https://arxiv.org/abs/2404.13026
-
[19]
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, and P. W. Battaglia,Learning to sim- ulate complex physics with graph networks, 2020. arXiv:2002.09405 [cs.LG]. [Online]. Available: https://arxiv.org/abs/2002.09405
-
[20]
Trace: Learning 3d gaussian physical dynamics from multi-view videos,
J. Li, Z. Song, and B. Yang, “Trace: Learning 3d gaussian physical dynamics from multi-view videos,” ICCV, 2025
2025
-
[21]
Gaussian grouping: Segment and edit anything in 3d scenes,
M. Ye, M. Danelljan, F. Yu, and L. Ke, “Gaussian grouping: Segment and edit anything in 3d scenes,” inECCV, 2024
2024
-
[22]
Learning Transferable Visual Models From Natural Language Supervision
A. Radford et al.,Learning transferable visual models from natural language supervision, 2021. arXiv:2103.00020 [cs.CV]. [Online]. Available: https://arxiv.org/abs/2103.00020
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[23]
Tracking anything with decoupled video segmentation,
H. K. Cheng, S. W. Oh, B. Price, A. Schwing, and J.-Y . Lee, “Tracking anything with decoupled video segmentation,” inICCV, 2023
2023
-
[24]
Nvfi: Neural velocity fields for 3d physics learning from dynamic videos,
J. Li, Z. Song, and B. Yang, “Nvfi: Neural velocity fields for 3d physics learning from dynamic videos,” Advances in Neural Information Processing Systems, vol. 36, pp. 34 723–34 751, 2023
2023
-
[25]
Perception Encoder: The best visual embeddings are not at the output of the network
D. Bolya et al.,Perception encoder: The best visual embeddings are not at the output of the network, 2025. arXiv:2504.13181 [cs.CV]. [Online]. Available: https://arxiv.org/abs/2504.13181
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.