High-Fidelity Industrial Crash Dynamics Prediction via Geometry-Aware Operator Learning with Memory-Efficient Low-Rank Attention
Pith reviewed 2026-06-29 18:04 UTC · model grok-4.3
The pith
GeoTransolver enables accurate high-fidelity prediction of industrial-scale automotive crash dynamics via geometry-aware operator learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
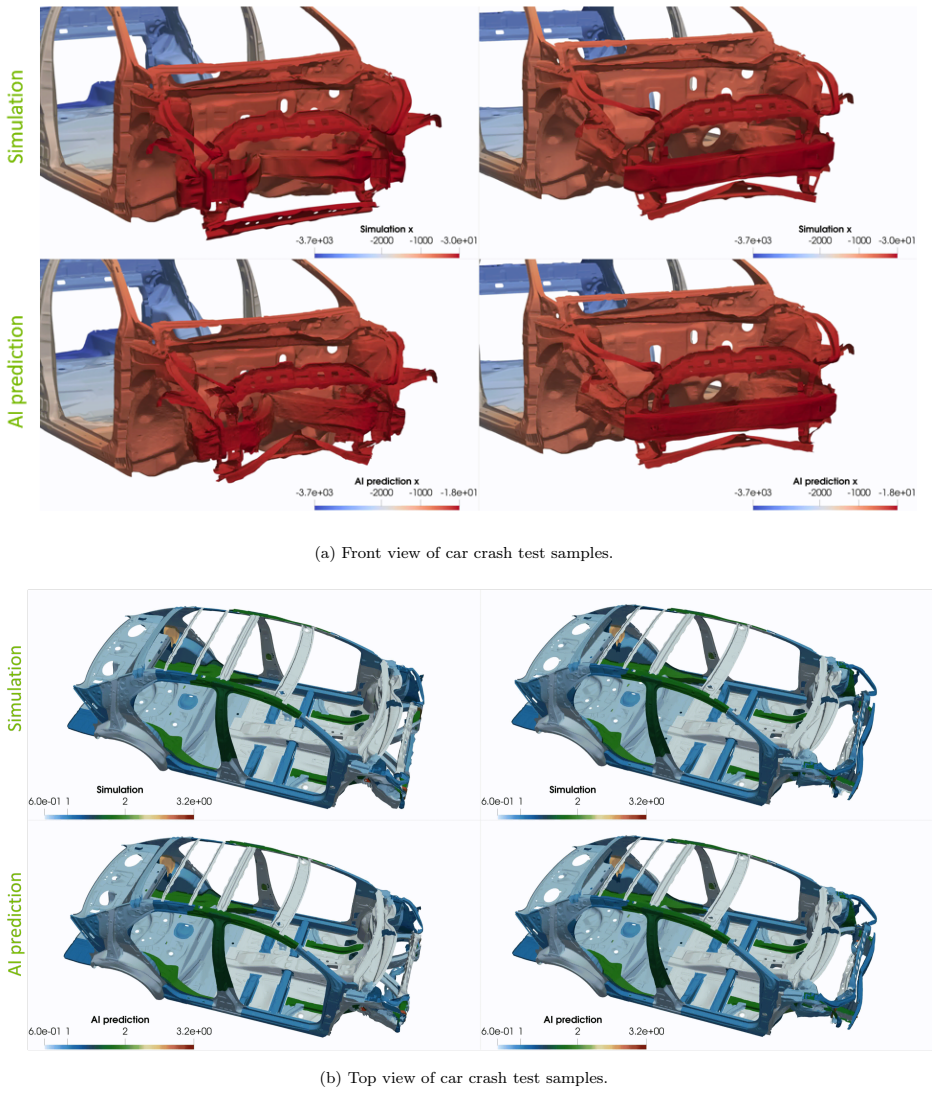
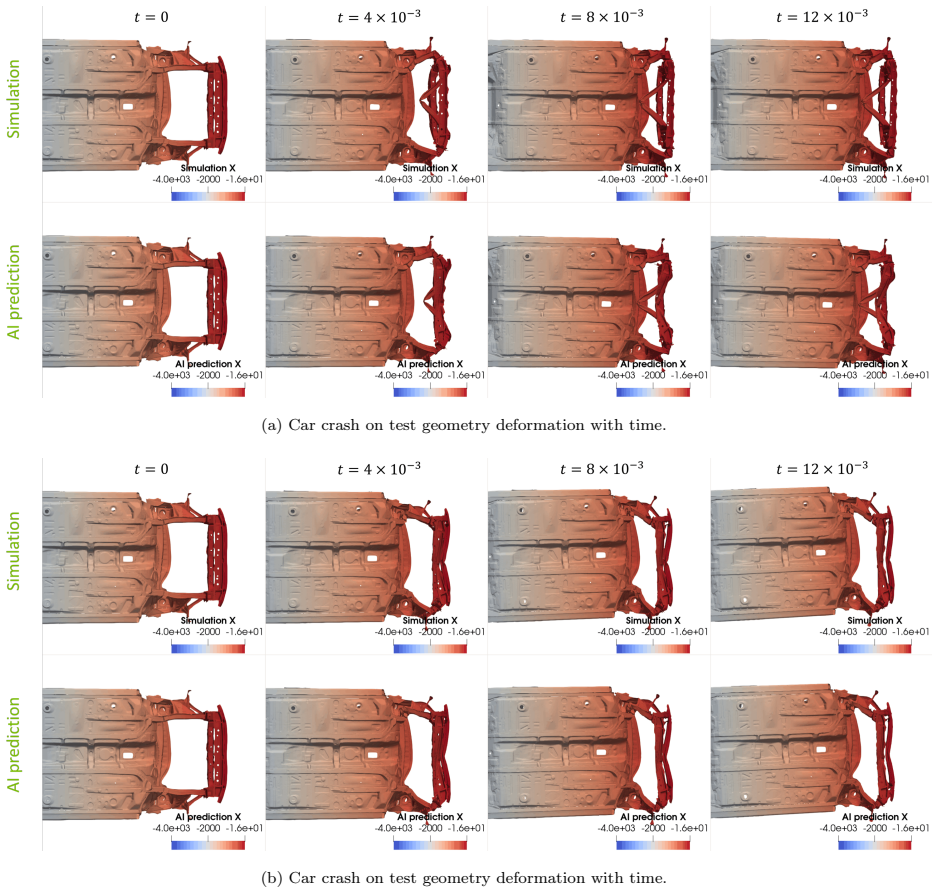
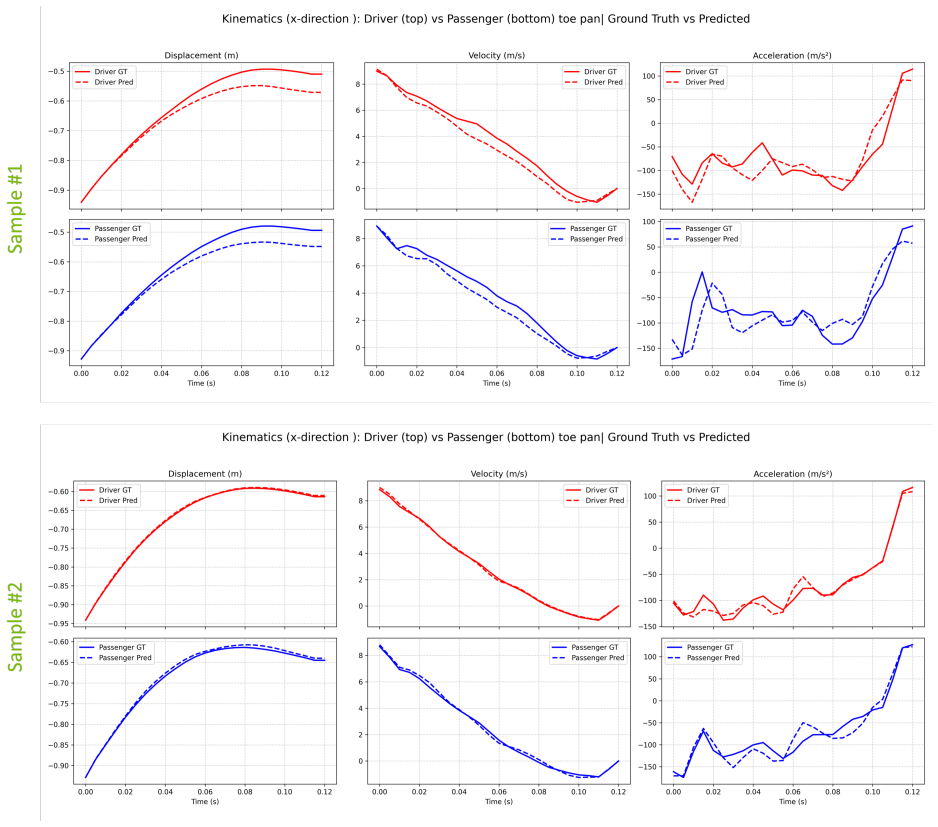
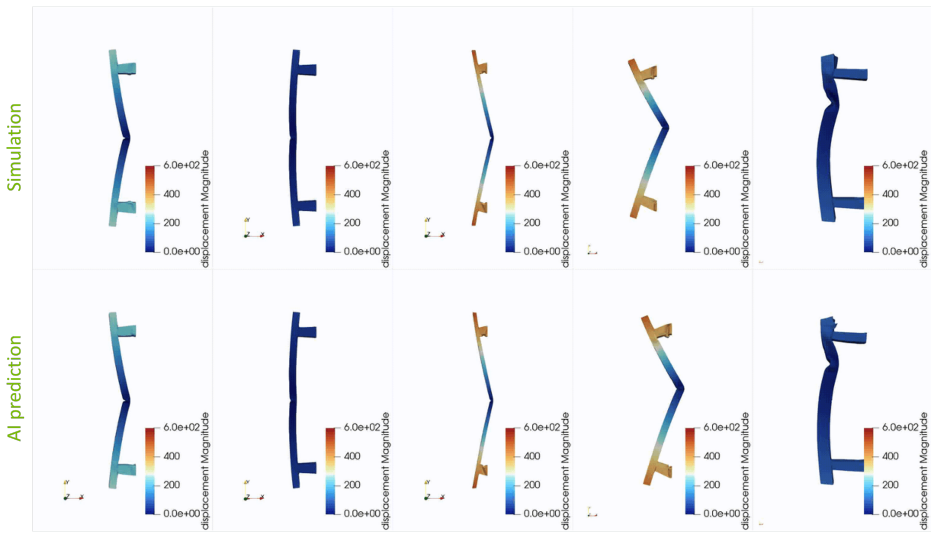
GeoTransolver provides a viable solution for accurate, high-fidelity crash dynamics prediction at industrial scale. Benchmarked on complex bumper beam and full-vehicle crash datasets, it captures multi-scale geometric context and accurately resolves plastic deformation patterns as well as acceleration profiles at critical occupant locations. The one-shot temporal prediction approach achieves state-of-the-art accuracy with significantly reduced training overhead and inference latency. A Fast Low-rank Attention Routing Engine (FLARE) modification to the attention backbone reduces memory overhead by approximately 2x while further improving predictive accuracy for O(N) long-range, high-frequency
What carries the argument
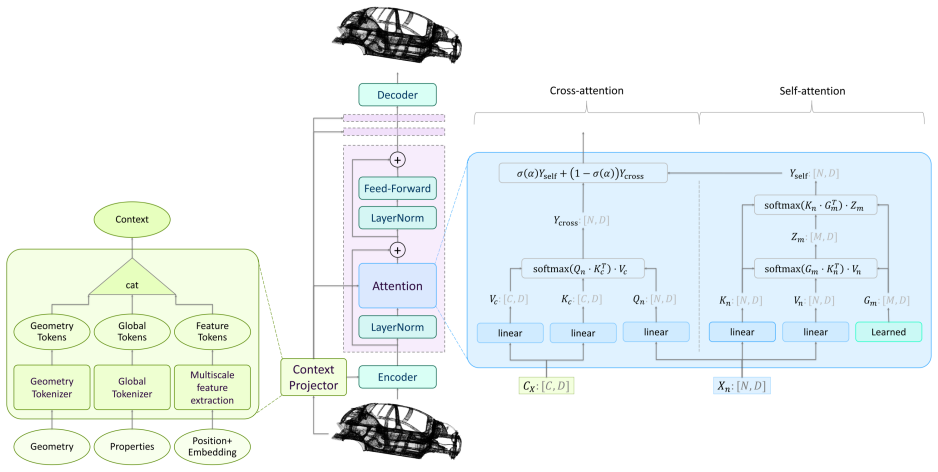
The geometry-aware cross-attention mechanism within the GeoTransolver operator-learning framework, which injects multi-scale geometric context to resolve transient nonlinear structural responses.
If this is right
- One-shot temporal prediction achieves state-of-the-art accuracy with significantly reduced training overhead and inference latency.
- The FLARE low-rank attention modification reduces memory overhead by approximately 2x while improving accuracy on long-range high-frequency transients.
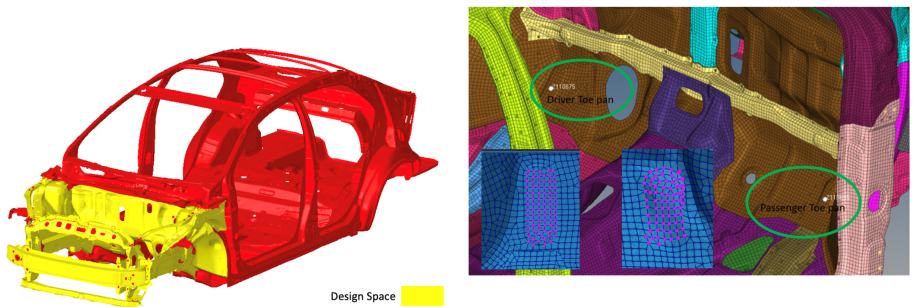
- The framework accurately resolves plastic deformation patterns and acceleration profiles at critical locations on industrial-scale models.
- Geometry-aware operator learning offers practical viability for high-fidelity surrogate modeling of complex automotive crash dynamics.
Where Pith is reading between the lines
- The same geometry-aware operator approach could be tested on other nonlinear transient problems such as impact in aerospace structures.
- Embedding the surrogate inside iterative design loops would allow engineers to explore many more candidate geometries per unit time.
- If the one-shot strategy generalizes, it could reduce the computational barrier to performing uncertainty quantification over crash outcomes.
Load-bearing premise
The complex bumper beam and full-vehicle crash datasets used for benchmarking are sufficiently representative of the full range of industrial nonlinearities, contact conditions, and geometry variations.
What would settle it
Apply the trained model to a new crash scenario involving geometry, materials, or contact conditions absent from the training datasets and measure whether the predicted deformations and accelerations deviate substantially from independent high-fidelity finite-element results.
Figures
read the original abstract
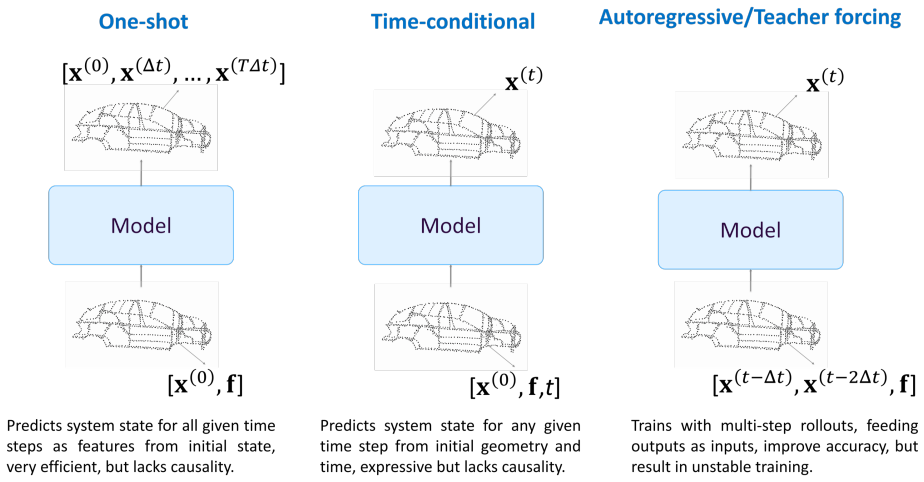
Automotive crashworthiness optimization remains a safety-critical challenge, requiring the management of large-scale nonlinear structural deformations and energy dissipation through iterative, high-fidelity simulations. While traditional finite element solvers are computationally prohibitive, emerging operator learning frameworks provide rapid surrogate predictions; however, applying them to industrial-scale crash analysis, where complex geometry, contact nonlinearities, and rapidly evolving transient deformation coexist, remains an open challenge. In this paper, we demonstrate that the GeoTransolver framework provides a viable solution for accurate, high-fidelity crash dynamics prediction at industrial scale. Benchmarked on complex bumper beam and full-vehicle crash datasets, GeoTransolver captures multi-scale geometric context and accurately resolves plastic deformation patterns as well as acceleration profiles at critical occupant locations. Beyond the architecture itself, we propose and systematically evaluate a suite of temporal prediction recipes, including one-shot, time-conditional, and autoregressive rollout strategies, demonstrating that the one-shot approach achieves state-of-the-art accuracy with significantly reduced training overhead and inference latency. As a secondary contribution, we introduce a Fast Low-rank Attention Routing Engine (FLARE)-based modification to the GeoTransolver attention backbone that reduces memory overhead by approximately 2x while further improving predictive accuracy for O(N) long-range, high-frequency transients, preserving the geometry-aware cross-attention strengths of the base framework. Our results highlight the practical viability of geometry-aware operator learning for high-fidelity surrogate modeling of complex, safety-critical automotive dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the GeoTransolver framework, a geometry-aware operator learning architecture augmented with a Fast Low-rank Attention Routing Engine (FLARE) modification, for high-fidelity prediction of automotive crash dynamics. It benchmarks the model on complex bumper beam and full-vehicle crash datasets, systematically compares one-shot, time-conditional, and autoregressive temporal prediction strategies, and claims that the one-shot approach delivers state-of-the-art accuracy with reduced training and inference costs while the FLARE variant halves memory usage and improves accuracy on long-range, high-frequency transients.
Significance. If the quantitative claims are substantiated, the work would offer a practical surrogate modeling approach for safety-critical nonlinear structural simulations, potentially reducing reliance on computationally expensive finite-element solvers in industrial crashworthiness workflows. The geometry-aware cross-attention and memory-efficient low-rank routing components could also contribute to operator learning methods for problems involving multi-scale geometry and transient contact nonlinearities.
major comments (2)
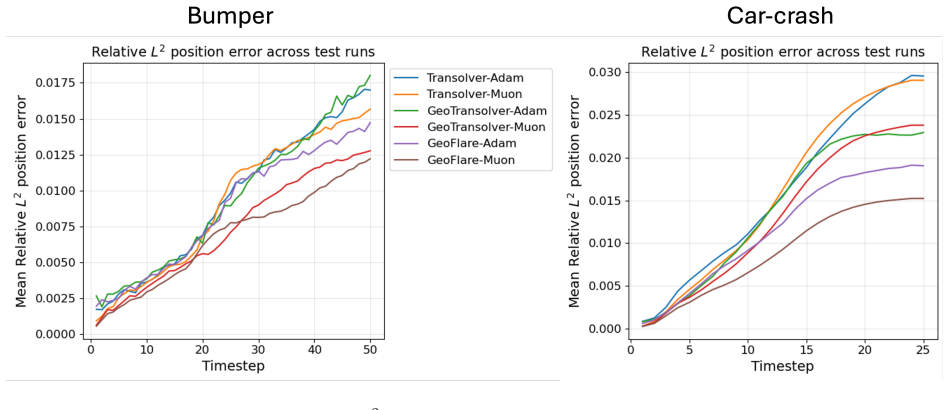
- [Abstract] Abstract: the central claim that GeoTransolver 'achieves state-of-the-art accuracy' and 'significantly reduced training overhead and inference latency' is asserted without any reported error metrics (e.g., relative L2 norms on displacement or acceleration fields), baseline comparisons against existing operator learners, or statistical measures such as standard deviations across runs. This absence renders the primary performance assertions unverifiable from the provided text.
- [Abstract] Abstract: the assertion that the bumper-beam and full-vehicle datasets suffice to demonstrate 'viable solution ... at industrial scale' is not supported by any quantitative characterization of the sampled parameter space (impact velocities, material constitutive models, mesh resolutions, contact formulations, or deformation regimes), leaving open whether benchmark accuracy generalizes to the broader distribution of production conditions.
minor comments (1)
- [Abstract] The FLARE acronym is introduced without parenthetical expansion on first use.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback on the abstract. We address each major comment below and will revise the abstract accordingly to improve verifiability while preserving its concise nature.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that GeoTransolver 'achieves state-of-the-art accuracy' and 'significantly reduced training overhead and inference latency' is asserted without any reported error metrics (e.g., relative L2 norms on displacement or acceleration fields), baseline comparisons against existing operator learners, or statistical measures such as standard deviations across runs. This absence renders the primary performance assertions unverifiable from the provided text.
Authors: We agree that the abstract does not contain the specific numerical values. The full manuscript reports these details in the experimental sections, including relative L2 norms on displacement and acceleration fields, comparisons against baselines such as standard Fourier Neural Operators and other geometry-aware models, and standard deviations computed over multiple independent runs. To address the concern directly, we will revise the abstract to include the key quantitative results (e.g., the achieved relative L2 error and latency reduction factors) so that the central claims are verifiable from the abstract alone. revision: yes
-
Referee: [Abstract] Abstract: the assertion that the bumper-beam and full-vehicle datasets suffice to demonstrate 'viable solution ... at industrial scale' is not supported by any quantitative characterization of the sampled parameter space (impact velocities, material constitutive models, mesh resolutions, contact formulations, or deformation regimes), leaving open whether benchmark accuracy generalizes to the broader distribution of production conditions.
Authors: The abstract summarizes the datasets at a high level. The manuscript body provides the requested characterization in the dataset description section, including ranges of impact velocities, material models, mesh resolutions, and contact settings. Nevertheless, we acknowledge that a brief quantitative summary would strengthen the abstract claim. We will therefore add a short clause to the abstract specifying the sampled ranges (e.g., velocity interval, mesh density, and deformation regimes) to make the industrial-scale assertion more transparent. revision: yes
Circularity Check
No circularity; claims rest on external benchmarking without visible self-referential reductions
full rationale
The abstract and visible text describe an operator-learning framework (GeoTransolver with FLARE) evaluated on bumper-beam and full-vehicle crash datasets, with comparisons among one-shot, time-conditional, and autoregressive strategies. No equations, loss functions, parameter-fitting procedures, or derivation chains are supplied that could reduce a claimed prediction to a fitted input or self-citation by construction. The central viability claim is supported by reported accuracy on the cited datasets rather than by any internal redefinition or uniqueness theorem imported from the authors' prior work. Absent any load-bearing step that equates output to input, the derivation chain is self-contained against the external simulation benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
C. Adams, R. Ranade, R. Cherukuri, S. Choudhry, Geotransolver: Learning physics on irregu- mar domains using multi-scale geometry aware physics attention transformer, arXiv preprint arXiv:2512.20399 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Du Bois, C
P. Du Bois, C. C. Chou, B. B. Fileta, T. B. Khalil, A. I. King, H. F. Mahmood, H. J. Mertz, J. Wismans, P. Prasad, J. E. Belwafa, Vehicle crashworthiness and occupant protection, Au- tomotive Applications Committee, American Iron and Steel Institute, Southfield, Michigan (2004)
2004
-
[3]
L. L. Hershman, The us new car assessment program (ncap): Past, present and future, in: International Technical Conference on Enhanced Safety of Vehicles, National Highway Traffic Safety Administration, 2001
2001
-
[4]
Ozcan, S
F. Ozcan, S. Ersoy, Analysis of the vehicle: applying finite element method of 3d data, Math- ematical Models in Engineering 7 (4) (2021) 63–69
2021
-
[5]
Z. Li, Q. Yu, X. Zhao, M. Yu, P. Shi, C. Yan, Crashworthiness and lightweight optimization to applied multiple materials and foam-filled front end structure of auto-body, Advances in Mechanical Engineering 9 (8) (2017) 1687814017702806
2017
-
[6]
T. Wang, L. Wang, C. Wang, X. Zou, Crashworthiness analysis and multi-objective opti- mization of a commercial vehicle frame: A mixed meta-modeling-based method, Advances in mechanical engineering 10 (5) (2018) 1687814018778480
2018
-
[7]
G. Sun, G. Li, S. Zhou, H. Li, S. Hou, Q. Li, Crashworthiness design of vehicle by using mul- tiobjective robust optimization, Structural and Multidisciplinary Optimization 44 (1) (2011) 99–110. 22
2011
-
[8]
C. Liu, X. Song, J. Wang, Simulation analysis of car front collision based on ls-dyna and hyper works, Journal of Transportation Technologies 4 (4) (2014) 337–342
2014
-
[9]
G. J. Sequeira, A. Patel, S. Afraj, R. Lugner, T. Brandmeier, Fem-based methodology for crash severity estimation in frontal crash scenarios, in: IOP Conference Series: Materials Science and Engineering, Vol. 831, IOP Publishing, 2020, p. 012019
2020
-
[10]
Karapetkov, H
S. Karapetkov, H. Uzunov, S. Dechkova, V. Uzunov, Dynamic modelling of vehicle collisions using the finite element method. cauchy problem., Journal of Engineering Science & Technology Review 15 (1) (2022)
2022
-
[11]
Hickey, S
A. Hickey, S. Xiao, Finite element modeling and simulation of car crash, International Journal of Modern Studies in Mechanical Engineering 3 (1) (2017) 1–5
2017
-
[12]
Bendjaballah, M
D. Bendjaballah, M. Sahli, T. Barrière, Modeling and numerical simulation of car frontal crash test using finite element method, Journal of Materials Science: Materials in Engineering 20 (1) (2025) 108
2025
-
[13]
H. Fang, M. Rais-Rohani, Z. Liu, M. Horstemeyer, A comparative study of metamodeling methods for multiobjective crashworthiness optimization, Computers & structures 83 (25-26) (2005) 2121–2136
2005
-
[14]
S. Thel, L. Greve, M. Karl, P. van der Smagt, Accelerating crash simulations with finite element method integrated networks (femin): Comparing two approaches to replace large portions of a fem simulation, Computer Methods in Applied Mechanics and Engineering 443 (2025) 118046
2025
-
[15]
W. Guo, P. Xu, C. Yang, J. Guo, L. Yang, S. Yao, Machine learning-based crashworthiness optimization for the square cone energy-absorbing structure of the subway vehicle, Structural and multidisciplinary Optimization 66 (8) (2023) 182
2023
-
[16]
S. Dey, R. Kiran, A data-driven geometry-specific surrogate model for forecasting the load– displacement behavior until ductile fracture: S. dey, r. kiran, International Journal of Fracture 249 (2) (2025) 31
2025
-
[17]
M. S. Khorrami, J. R. Mianroodi, N. H. Siboni, P. Goyal, B. Svendsen, P. Benner, D. Raabe, 23 An artificial neural network for surrogate modeling of stress fields in viscoplastic polycrystalline materials, npj Computational Materials 9 (1) (2023) 37
2023
-
[18]
S. Tao, Z. Feng, H. Sun, Z. Zhu, Y. Liu, Ladeep: A deep learning-based surrogate model for largedeformationofelastic-plasticsolids, in: Proceedingsofthe31stACMSIGKDDConference on Knowledge Discovery and Data Mining V. 2, 2025, pp. 4901–4912
2025
-
[19]
Hashemi, J
A. Hashemi, J. Beheshti, M. Mohammadi, Physics-based, ai-driven surrogate modeling for structuraldisplacementpredictioninmechanicalsystemswithlimitedsensordata, IEEEAccess (2025)
2025
-
[20]
Koutsoupakis, D
J. Koutsoupakis, D. Giagopoulos, Drivetrain response prediction using ai-based surrogate and multibody dynamics model, Machines 11 (5) (2023) 514
2023
-
[21]
T. Wang, M. Shao, R. Guo, F. Tao, G. Zhang, H. Snoussi, X. Tang, Surrogate model via artificial intelligence method for accelerating screening materials and performance prediction, Advanced Functional Materials 31 (8) (2021) 2006245
2021
-
[22]
H. Toda, H. Li, R. Batres, K. Hirayama, H. Fujihara, Surrogate-based optimization of mi- crostructural features of structural materials, Acta Materialia 257 (2023) 119188
2023
-
[23]
A. H. Altoyuri, A. Sarmah, M. K. Jain, Plastic deformation and damage modeling of aa7075 synthetic 3d microstructure created using generative ai, Acta Materialia 281 (2024) 120431
2024
-
[24]
Huang, G
Q. Huang, G. Zheng, J. Liu, B. Bouallegue, Physics-informed modeling and deep learning- driven optimization of go–cnt hybrid nanocomposites-reinforced car hood doors under nonlinear dynamic loading, The European Physical Journal Plus 140 (9) (2025) 842
2025
-
[25]
Y. Ao, S. Li, H. Duan, Artificial intelligence-aided design (aiad) for structures and engineering: A state-of-the-art review and future perspectives: Y. ao et al., Archives of Computational Methods in Engineering 32 (7) (2025) 4197–4224
2025
-
[26]
M. Shao, J. Chen, T. Wang, F. Tao, J. Du, D. Zhang, X. Wang, X. Tang, Accelerating analysis for structure design via deep learning surrogate models, Advanced Intelligent Systems 5 (2) (2023) 2200099. 24
2023
-
[27]
H. Bakhshan, S. Farshbaf, J. R. Machado, F. R. Canela, J. M. Carbonell, Ai meets plasticity: A comprehensive survey, arXiv preprint arXiv:2602.01215 (2026)
-
[28]
J. G. Hoffer, B. C. Geiger, P. Ofner, R. Kern, Mesh-free surrogate models for structural me- chanic fem simulation: A comparative study of approaches, Applied Sciences 11 (20) (2021) 9411
2021
-
[29]
H.Li, Y.Zhao, H.Zhou, T.Pfaff, N.Li, Anewgraph-basedsurrogatemodelforrapidprediction of crashworthiness performance of vehicle panel components, arXiv preprint arXiv:2503.17386 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[30]
S. St. John, J. Groves, A. Kameswari, J. Huff, T. Wagoner, B. Gattis, F. Bagheri, M. Groe- ber, S. Niezgoda, A. Khojandi, Graph neural networks for fast prediction of plastic metal deformation in hot forging, Integrating Materials and Manufacturing Innovation (2026) 1–12
2026
-
[31]
L. Lu, P. Jin, G. Pang, Z. Zhang, G. E. Karniadakis, Learning nonlinear operators via deeponet based on the universal approximation theorem of operators, Nature machine intelligence 3 (3) (2021) 218–229
2021
-
[32]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, A. Anand- kumar, Fourier neural operator for parametric partial differential equations, arXiv preprint arXiv:2010.08895 (2020)
work page internal anchor Pith review Pith/arXiv arXiv 2010
- [33]
-
[34]
D. Gao, B. Yao, G. Chang, Q. Li, Multi-objective optimization design of vehicle side crash- worthiness based on machine learning point-adding method, Applied Sciences 12 (20) (2022) 10320
2022
- [35]
-
[36]
Z. Hao, Z. Wang, H. Su, C. Ying, Y. Dong, S. Liu, Z. Cheng, J. Song, J. Zhu, Gnot: A general 25 neural operator transformer for operator learning, in: International conference on machine learning, PMLR, 2023, pp. 12556–12569
2023
-
[37]
H. Wu, H. Luo, H. Wang, J. Wang, M. Long, Transolver: A fast transformer solver for pdes on general geometries, arXiv preprint arXiv:2402.02366 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [38]
- [39]
-
[40]
Accessed: October 8, 2025)
National Highway Traffic Safety Administration, Crash simulation vehicle models,https:// www.nhtsa.gov/crash-simulation-vehicle-models(Last Modified n.d. Accessed: October 8, 2025)
2025
-
[41]
J. Liu, J. Su, X. Yao, Z. Jiang, G. Lai, Y. Du, Y. Qin, W. Xu, E. Lu, J. Yan, et al., Muon is scalable for llm training, arXiv preprint arXiv:2502.16982 (2025). 26
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.