ElegantVLA: Learning When to Think for Efficient Vision-Language-Action Models
Pith reviewed 2026-06-29 07:14 UTC · model grok-4.3
The pith
ElegantVLA accelerates VLA models by scheduling full recomputation only during goal-sensitive phases of robot motion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
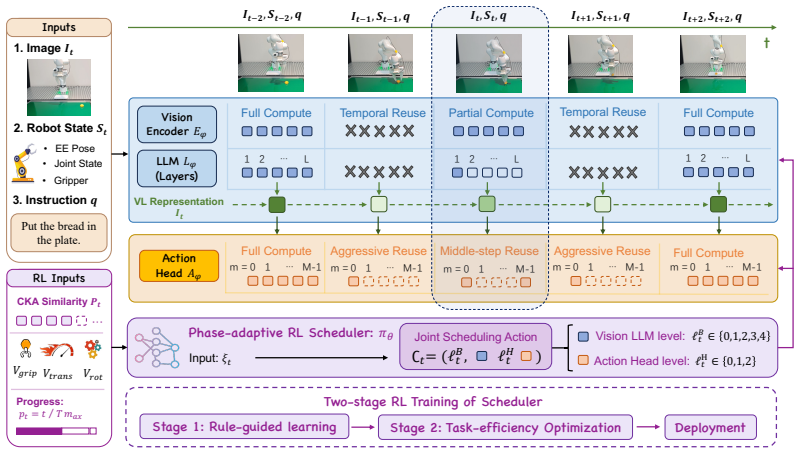
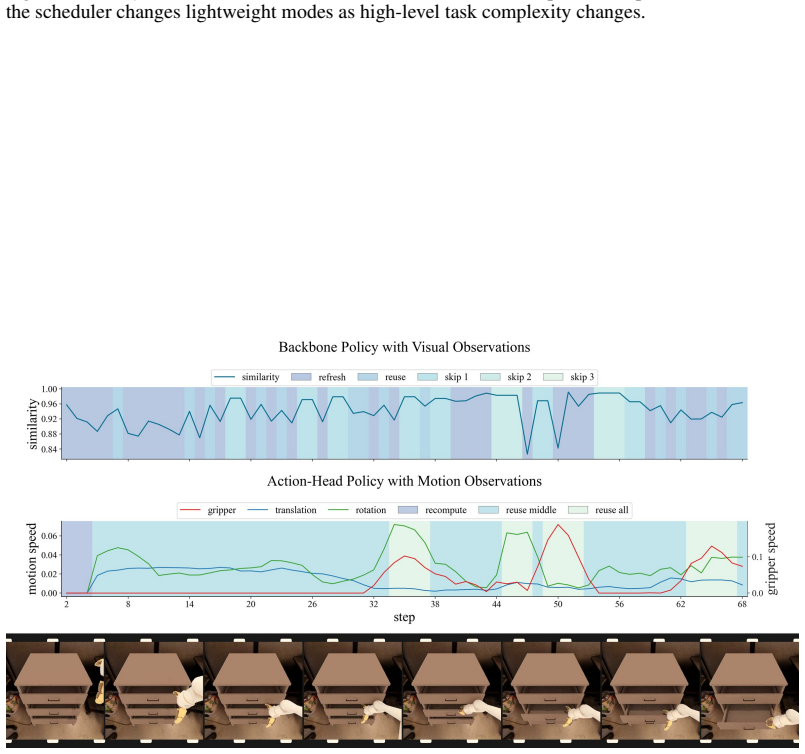
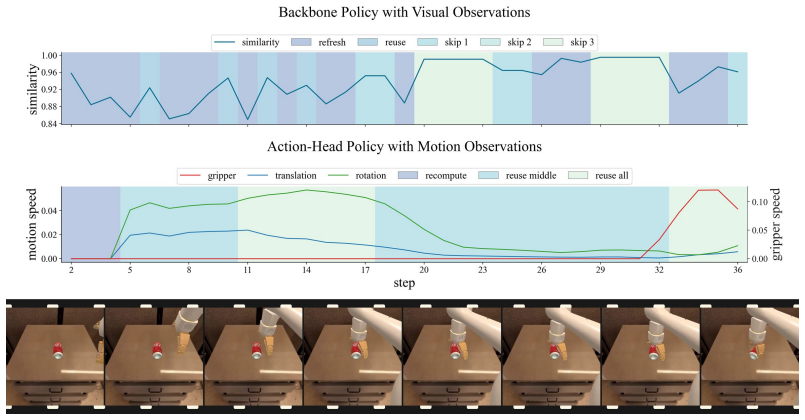
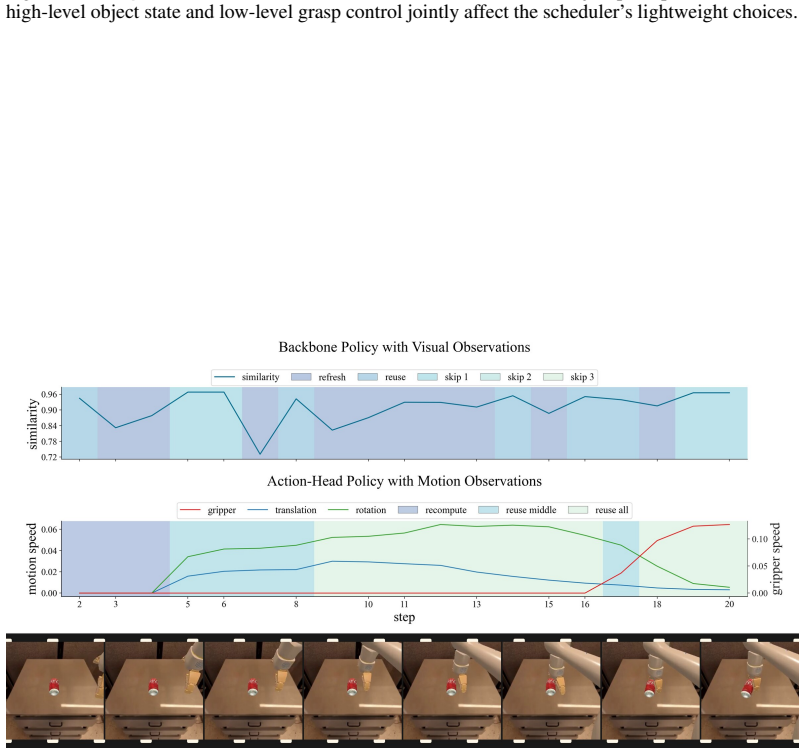
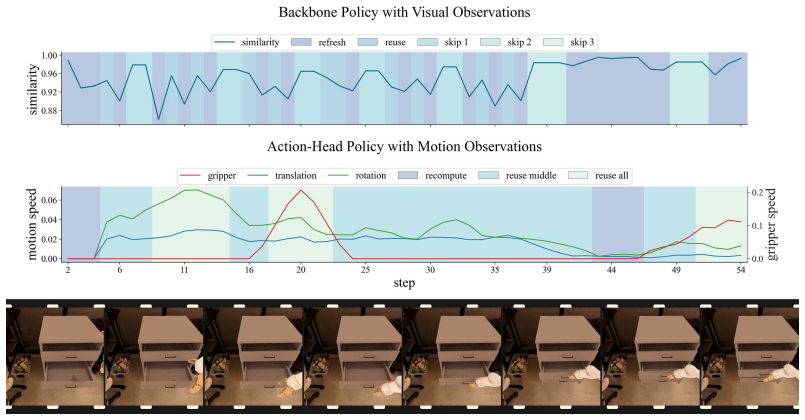
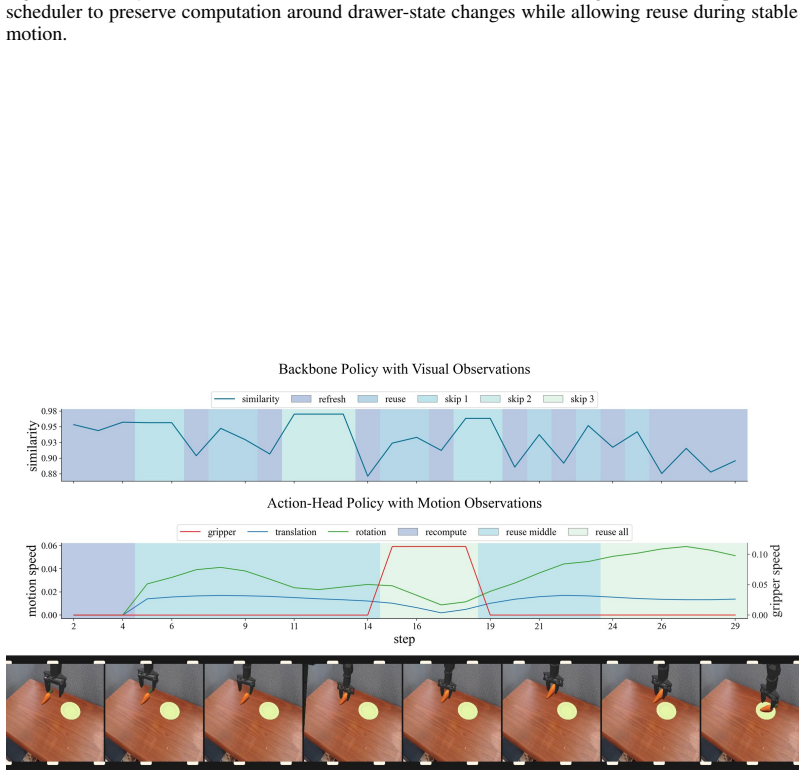
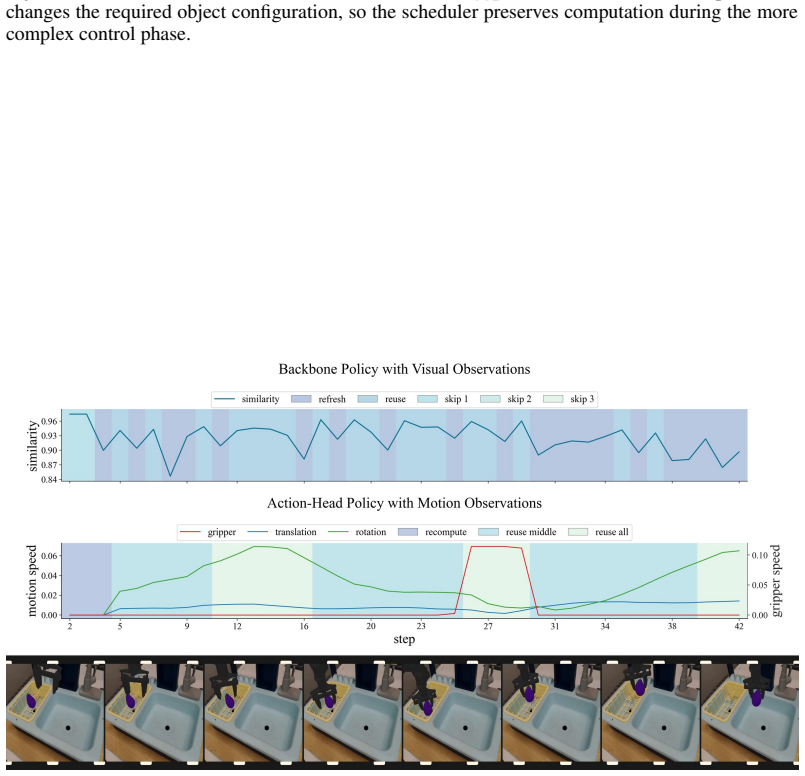
ElegantVLA is a phase-adaptive inference framework that introduces a lightweight scheduler to coordinate five-level vision-LLM compute modes (full recomputation to multi-step temporal reuse) and three-level action denoising modes. The scheduler jointly observes temporal representation similarity, robot-motion cues, and episode progress to allocate computation only when needed, enabling acceleration of modern VLA pipelines that contain explicit action-generation modules without any modification or retraining of the base model.
What carries the argument
The lightweight scheduler that selects vision-LLM and action-head compute modes from temporal representation similarity, robot-motion cues, and episode progress.
If this is right
- Up to 2.55x speedup on GR00T and 3.77x on CogACT benchmarks.
- On six real-world GR00T tasks, computation drops by 2.18x and control frequency rises from 13.8 Hz to 26.3 Hz.
- The method works as a plug-in for any VLA with explicit action-generation modules and requires no base-model changes.
- Coordination of vision-language and action decisions preserves performance while raising efficiency.
- The approach applies to sequential embodied control where reasoning demand varies across steps.
Where Pith is reading between the lines
- The same stability-based scheduling could be tested on other sequential multimodal models outside robotics.
- If the scheduler generalizes, it might combine with quantization or distillation for further gains.
- Long-horizon tasks with infrequent goal changes would likely see the largest frequency increases.
- Failure modes would appear first on tasks where visual or motion similarity misleads the reuse decision.
Load-bearing premise
The scheduler can correctly decide when to reuse prior computation versus run full recomputation using only those three signals, without lowering task success rates.
What would settle it
Apply the scheduler to the same GR00T or CogACT evaluation tasks and measure whether success rate falls below the unmodified base model.
Figures
read the original abstract
Vision-Language-Action (VLA) models are a powerful paradigm for generalist robotic control. However, their high computational cost and limited control frequency hinder real-time robotic manipulation, especially when large vision-language backbones and iterative action heads run at every control step. Existing VLA acceleration methods often optimize individual components or rely on fixed acceleration rules, treating different control steps with largely fixed computation and overlooking the non-uniform reasoning demands of sequential embodied control. Inspired by human motor control, where cognitive and feedback resources concentrate on goal-sensitive stages, we argue that VLA models should learn when to invest full computation and when to reuse prior computation. We propose ElegantVLA, a plug-in phase-adaptive inference framework that accelerates VLA models through intra-model dynamic compute scheduling. ElegantVLA introduces a lightweight scheduler that observes temporal representation similarity, robot-motion cues, and episode progress to jointly allocate computation across the vision encoder, LLM, and action head. For perception-language reasoning, the scheduler selects a five-level Vision-LLM compute mode, from full recomputation to multi-step temporal reuse, based on visual-language representation stability. For action generation, it selects a three-level denoising mode, reusing intermediate denoising states during stable motion while preserving full refinement for goal-sensitive stages. By coordinating these decisions, ElegantVLA offers a general acceleration framework for modern VLA pipelines with explicit action-generation modules, without modifying or retraining the base model. Experiments on GR00T and CogACT achieve up to 2.55x and 3.77x speedup, and on six real-world GR00T tasks ElegantVLA cuts computation by 2.18x while raising control frequency from 13.8 Hz to 26.3 Hz.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes ElegantVLA, a plug-in phase-adaptive inference framework for Vision-Language-Action (VLA) models. It introduces a lightweight scheduler that uses temporal representation similarity, robot-motion cues, and episode progress to dynamically select among five-level Vision-LLM compute modes (full recomputation to multi-step temporal reuse) and three-level action denoising modes, without modifying or retraining the base model. The central claims are speedups of up to 2.55x on GR00T and 3.77x on CogACT, plus 2.18x compute reduction and control frequency increase from 13.8 Hz to 26.3 Hz on six real-world GR00T tasks.
Significance. If the scheduler maintains task success rates while delivering the reported efficiency gains, this could meaningfully advance real-time robotic control by addressing the uniform high compute of VLAs. The plug-in design, coordination of perception and action scheduling, and validation across simulation models plus real-world tasks are concrete strengths that would support broader adoption if the no-degradation claim is substantiated.
major comments (3)
- [§4] §4 (Experiments on real-world tasks): success rates or task completion metrics comparing ElegantVLA to the GR00T baseline on the six real-world tasks are not reported; only aggregate compute reduction and frequency are given. This directly bears on the central claim that the scheduler preserves performance without base-model changes.
- [§3.1] §3.1 (lightweight scheduler): the exact similarity metric, decision thresholds, and combination rule for temporal representation similarity, robot-motion cues, and episode progress are not specified. Without these, the accuracy of recomputation detection cannot be assessed or reproduced, which is load-bearing for the plug-in acceleration claim.
- [§3.2] §3.2 (Vision-LLM and denoising modes): the implementation details of the five-level vision-LLM reuse and three-level denoising reuse (e.g., how intermediate states are cached and reused) are insufficient to verify that output quality is preserved in goal-sensitive stages, undermining the assertion that no base-model retraining is needed.
minor comments (2)
- [Abstract] Abstract: the reported speedups are given as 'up to' values without accompanying averages, variance, or conditions under which they were measured.
- [§3] Notation in §3: the five-level and three-level modes would benefit from an explicit table mapping cue conditions to selected modes for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed report. We address each major comment below and will make the indicated revisions to improve the manuscript's clarity, reproducibility, and substantiation of claims.
read point-by-point responses
-
Referee: [§4] §4 (Experiments on real-world tasks): success rates or task completion metrics comparing ElegantVLA to the GR00T baseline on the six real-world tasks are not reported; only aggregate compute reduction and frequency are given. This directly bears on the central claim that the scheduler preserves performance without base-model changes.
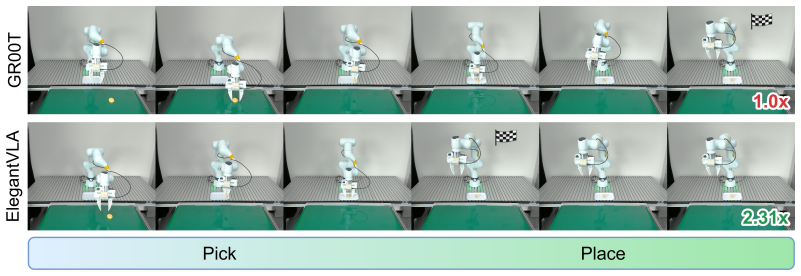
Authors: The referee correctly notes that §4 reports only the aggregate 2.18× compute reduction and frequency increase (13.8 Hz to 26.3 Hz) for the six real-world GR00T tasks. Although the scheduler is explicitly designed to allocate full computation to goal-sensitive stages, and simulation results on GR00T and CogACT show no degradation, we agree that real-world success rates are required to fully support the performance-preservation claim. In the revised manuscript we will add these metrics (task success rates and completion percentages versus the GR00T baseline) to §4, using data from the same experimental runs. revision: yes
-
Referee: [§3.1] §3.1 (lightweight scheduler): the exact similarity metric, decision thresholds, and combination rule for temporal representation similarity, robot-motion cues, and episode progress are not specified. Without these, the accuracy of recomputation detection cannot be assessed or reproduced, which is load-bearing for the plug-in acceleration claim.
Authors: We accept this criticism. The current text describes the three input signals but omits the precise implementation. In the revision we will specify: (i) cosine similarity on the concatenated vision-language features, (ii) concrete thresholds (e.g., similarity > 0.92 triggers partial reuse), and (iii) the combination rule (a weighted sum with coefficients 0.5/0.3/0.2 followed by a threshold comparison). Pseudocode and the validation procedure used to set the thresholds will also be added to §3.1. revision: yes
-
Referee: [§3.2] §3.2 (Vision-LLM and denoising modes): the implementation details of the five-level vision-LLM reuse and three-level denoising reuse (e.g., how intermediate states are cached and reused) are insufficient to verify that output quality is preserved in goal-sensitive stages, undermining the assertion that no base-model retraining is needed.
Authors: We agree that the mode descriptions are currently high-level. The revised §3.2 will include: (i) explicit definitions of the five Vision-LLM levels (full forward pass down to k-step KV-cache reuse), (ii) the three denoising levels with details on which intermediate noise estimates are cached and how they are injected, and (iii) a diagram showing the cache-update logic that ensures full refinement occurs precisely when the scheduler detects goal-sensitive phases. These additions will make clear that all operations remain inference-only and require no base-model changes or retraining. revision: yes
Circularity Check
No circularity: claims are empirical measurements of a plug-in scheduler, not derivations reducing to inputs
full rationale
The paper introduces ElegantVLA as a plug-in inference framework with a lightweight scheduler using temporal similarity, motion cues, and progress to select compute modes. All central claims (2.55x/3.77x speedups, 2.18x real-world compute cut, frequency increase from 13.8 Hz to 26.3 Hz) are presented as direct experimental outcomes on GR00T and CogACT without any equations, fitted parameters renamed as predictions, or self-citation chains that define the result by construction. The scheduler's design is described descriptively and validated by reported measurements rather than tautological internal definitions. No load-bearing steps reduce to self-definition or fitted-input predictions.
Axiom & Free-Parameter Ledger
invented entities (1)
-
lightweight scheduler
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Rt-2: Vision-language-action models trans- fer web knowledge to robotic control
Brianna Zitkovich, Tianhe Y u, Sichun Xu, Peng Xu, Ted Xiao, Fei Xia, Jialin Wu, Paul Wohlhart, Stefan Welker, Ayzaan Wahid, et al. Rt-2: Vision-language-action models trans- fer web knowledge to robotic control. In Conference on Robot Learning , pages 2165–2183. PMLR, 2023
2023
-
[2]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model. arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
Octo: An Open-Source Generalist Robot Policy
Octo Model Team, Dibya Ghosh, Homer Walke, Karl Pertsch, Kevin Black, Oier Mees, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, et al. Octo: An open-source generalist robot policy. arXiv preprint arXiv:2405.12213, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. π0: A vision-language-action flow model for general robot control. arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[5]
Qixiu Li, Y aobo Liang, Zeyu Wang, Lin Luo, Xi Chen, Mozheng Liao, Fangyun Wei, Y u Deng, Sicheng Xu, Yizhong Zhang, et al. Cogact: A foundational vision-language-action model for synergizing cognition and action in robotic manipulation. arXiv preprint arXiv:2411.19650 , 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[6]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Songming Liu, Lingxuan Wu, Bangguo Li, Hengkai Tan, Huayu Chen, Zhengyi Wang, Ke Xu, Hang Su, and Jun Zhu. Rdt-1b: a diffusion foundation model for bimanual manipulation. arXiv preprint arXiv:2410.07864, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[7]
Efficient Vision-Language-Action Models for Embodied Manipulation: A Systematic Survey
Weifan Guan, Qinghao Hu, Aosheng Li, and Jian Cheng. Efficient vision-language-action models for embodied manipulation: A systematic survey. arXiv preprint arXiv:2510.17111 , 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[8]
arXiv preprint arXiv:2510.24795 , year =
Zhaoshu Y u, Bo Wang, Pengpeng Zeng, Haonan Zhang, Ji Zhang, Zheng Wang, Lianli Gao, Jingkuan Song, Nicu Sebe, and Heng Tao Shen. A survey on efficient vision-language-action models. arXiv preprint arXiv:2510.24795, 2025
-
[9]
Deer-vla: Dynamic inference of multimodal large language models for efficient robot execution
Y ang Y ue, Y ulin Wang, Bingyi Kang, Yizeng Han, Shenzhi Wang, Shiji Song, Jiashi Feng, and Gao Huang. Deer-vla: Dynamic inference of multimodal large language models for efficient robot execution. Advances in Neural Information Processing Systems , 37:56619–56643, 2024
2024
-
[10]
Quantization-aware imitation-learning for resource-efficient robotic control
Seongmin Park, Hyungmin Kim, Wonseok Jeon, Juyoung Y ang, Byeongwook Jeon, Y oonseon Oh, and Jungwook Choi. Quantization-aware imitation-learning for resource-efficient robotic control. arXiv preprint arXiv:2412.01034, 2024
-
[11]
arXiv preprint arXiv:2506.10100 (2025)
Y antai Y ang, Y uhao Wang, Zichen Wen, Luo Zhongwei, Chang Zou, Zhipeng Zhang, Chuan Wen, and Linfeng Zhang. Efficientvla: Training-free acceleration and compression for vision- language-action models. arXiv preprint arXiv:2506.10100, 2025
-
[12]
Zebin Y ang, Yijiahao Qi, Tong Xie, Bo Y u, Shaoshan Liu, and Meng Li. Dysl-vla: Efficient vision-language-action model inference via dynamic-static layer-skipping for robot manipula- tion. arXiv preprint arXiv:2602.22896, 2026
-
[13]
Dyq-vla: Temporal-dynamic-aware quantization for embodied vision-language-action models
Zihao Zheng, Hangyu Cao, Sicheng Tian, Jiayu Chen, Maoliang Li, Xinhao Sun, Hailong Zou, Zhaobo Zhang, Xuanzhe Liu, Donggang Cao, et al. Dyq-vla: Temporal-dynamic-aware quantization for embodied vision-language-action models. arXiv preprint arXiv:2603.07904 , 2026
-
[14]
Wenda Y u, Tianshi Wang, Fengling Li, Jingjing Li, and Lei Zhu. Acˆ 2-vla: Action-context- aware adaptive computation in vision-language-action models for efficient robotic manipula- tion. arXiv preprint arXiv:2601.19634, 2026
-
[15]
Prance: Joint token-optimization and structural channel-pruning for adaptive vit inference
Y e Li, Chen Tang, Y uan Meng, Jiajun Fan, Zenghao Chai, Xinzhu Ma, Zhi Wang, and Wenwu Zhu. Prance: Joint token-optimization and structural channel-pruning for adaptive vit inference. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2025. 10
2025
-
[16]
Vla-cache: Towards efficient vision-language-action model via adaptive token caching in robotic manipu- lation
Siyu Xu, Y unke Wang, Chenghao Xia, Dihao Zhu, Tao Huang, and Chang Xu. Vla-cache: Towards efficient vision-language-action model via adaptive token caching in robotic manipu- lation. arXiv e-prints, pages arXiv–2502, 2025
2025
-
[17]
Sp-vla: A joint model scheduling and token pruning approach for vla model acceleration
Y e Li, Y uan Meng, Zewen Sun, Kangye Ji, Chen Tang, Jiajun Fan, Xinzhu Ma, Shutao Xia, Zhi Wang, and Wenwu Zhu. Sp-vla: A joint model scheduling and token pruning approach for vla model acceleration. arXiv preprint arXiv:2506.12723, 2025
-
[18]
arXiv preprint arXiv:2505.21200 , year =
Xudong Tan, Y aoxin Y ang, Peng Y e, Jialin Zheng, Bizhe Bai, Xinyi Wang, Jia Hao, and Tao Chen. Think twice, act once: Token-aware compression and action reuse for efficient inference in vision-language-action models. arXiv preprint arXiv:2505.21200, 2025
-
[19]
SpecPrune-VLA: Accelerating Vision-Language-Action Models via Action-Aware Self-Speculative Pruning
Hanzhen Wang, Jiaming Xu, Y ushun Xiang, Jiayi Pan, Y ongkang Zhou, Y ong-Lu Li, and Guohao Dai. Specprune-vla: Accelerating vision-language-action models via action-aware self-speculative pruning. arXiv preprint arXiv:2509.05614, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[20]
Xiaohuan Pei, Y uxing Chen, Siyu Xu, Y unke Wang, Y uheng Shi, and Chang Xu. Action- aware dynamic pruning for efficient vision-language-action manipulation. arXiv preprint arXiv:2509.22093, 2025
-
[21]
Bridging the Semantic-Action Gap in Visual Token Pruning for Efficient VLA Inference
Ziyan Liu, Y eqiu Chen, Hongyi Cai, Tao Lin, Shuo Y ang, Zheng Liu, and Bo Zhao. Vla-pruner: Temporal-aware dual-level visual token pruning for efficient vision-language-action inference. arXiv preprint arXiv:2511.16449, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
arXiv preprint arXiv:2509.12594 , year =
Titong Jiang, Xuefeng Jiang, Y uan Ma, Xin Wen, Bailin Li, Kun Zhan, Peng Jia, Y ahui Liu, Sheng Sun, and Xianpeng Lang. The better you learn, the smarter you prune: To- wards efficient vision-language-action models via differentiable token pruning. arXiv preprint arXiv:2509.12594, 2025
-
[23]
Ts-dp: Reinforcement speculative decoding for temporal adaptive diffusion policy acceleration
Y e Li, Jiahe Feng, Y uan Meng, Kangye Ji, Chen Tang, Xinwan Wen, Shutao Xia, Zhi Wang, and Wenwu Zhu. Ts-dp: Reinforcement speculative decoding for temporal adaptive diffusion policy acceleration. arXiv preprint arXiv:2512.15773, 2025
-
[24]
Block-wise Adaptive Caching for Accelerating Diffusion Policy
Kangye Ji, Y uan Meng, Hanyun Cui, Y e Li, Shengjia Hua, Lei Chen, and Zhi Wang. Block- wise adaptive caching for accelerating diffusion policy. arXiv preprint arXiv:2506.13456 , 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[25]
Accelerating vision-language-action model integrated with action chunking via parallel decoding
Wenxuan Song, Jiayi Chen, Pengxiang Ding, Han Zhao, Wei Zhao, Zhide Zhong, Zongyuan Ge, Jun Ma, and Haoang Li. Accelerating vision-language-action model integrated with action chunking via parallel decoding. arXiv preprint arXiv:2503.02310, 2025
-
[26]
FASTER: Rethinking Real-Time Flow VLAs
Y uxiang Lu, Zhe Liu, Xianzhe Fan, Zhenya Y ang, Jinghua Hou, Junyi Li, Kaixin Ding, and Hengshuang Zhao. Faster: Rethinking real-time flow vlas. arXiv preprint arXiv:2603.19199 , 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[27]
An internal model for sensori- motor integration
Daniel M Wolpert, Zoubin Ghahramani, and Michael I Jordan. An internal model for sensori- motor integration. Science, 269(5232):1880–1882, 1995
1995
-
[28]
Signal-dependent noise determines motor plan- ning
Christopher M Harris and Daniel M Wolpert. Signal-dependent noise determines motor plan- ning. Nature, 394(6695):780–784, 1998
1998
-
[29]
Optimal feedback control as a theory of motor coor- dination
Emanuel Todorov and Michael I Jordan. Optimal feedback control as a theory of motor coor- dination. Nature neuroscience, 5(11):1226–1235, 2002
2002
-
[30]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Johan Bjorck, Fernando Castañeda, Nikita Cherniadev, Xingye Da, Runyu Ding, Linxi Fan, Y u Fang, Dieter Fox, Fengyuan Hu, Spencer Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots. arXiv preprint arXiv:2503.14734, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[31]
A ddpg-based solution for optimal consensus of continuous-time linear multi-agent systems
Y e Li, ZhongXin Liu, Ge Lan, Malika Sader, and ZengQiang Chen. A ddpg-based solution for optimal consensus of continuous-time linear multi-agent systems. Science China Technologi- cal Sciences, 66(8):2441–2453, 2023
2023
-
[32]
A novel data-driven model-free synchro- nization protocol for discrete-time multi-agent systems via td3 based algorithm
Zhongxin Liu, Y e Li, Ge Lan, and Zengqiang Chen. A novel data-driven model-free synchro- nization protocol for discrete-time multi-agent systems via td3 based algorithm. Knowledge- Based Systems, 287:111430, 2024. 11
2024
-
[33]
Ttf-vla: Temporal token fusion via pixel-attention integration for vision- language-action models
Chenghao Liu, Jiachen Zhang, Chengxuan Li, Zhimu Zhou, Shixin Wu, Songfang Huang, and Huiling Duan. Ttf-vla: Temporal token fusion via pixel-attention integration for vision- language-action models. In Proceedings of the AAAI Conference on Artificial Intelligence , volume 40, pages 18452–18459, 2026
2026
-
[34]
Sparse ActionGen: Accelerating Diffusion Policy with Real-time Pruning
Kangye Ji, Y uan Meng, Zhou Jianbo, Y e Li, Hanyun Cui, and Zhi Wang. Sparse actiongen: Accelerating diffusion policy with real-time pruning. arXiv preprint arXiv:2601.12894, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[35]
An image is worth 1/2 tokens after layer 2: Plug-and-play inference acceleration for large vision-language models
Liang Chen, Haozhe Zhao, Tianyu Liu, Shuai Bai, Junyang Lin, Chang Zhou, and Baobao Chang. An image is worth 1/2 tokens after layer 2: Plug-and-play inference acceleration for large vision-language models. In European Conference on Computer Vision , pages 19–35. Springer, 2024
2024
-
[36]
arXiv preprint arXiv:2503.20384 (2025)
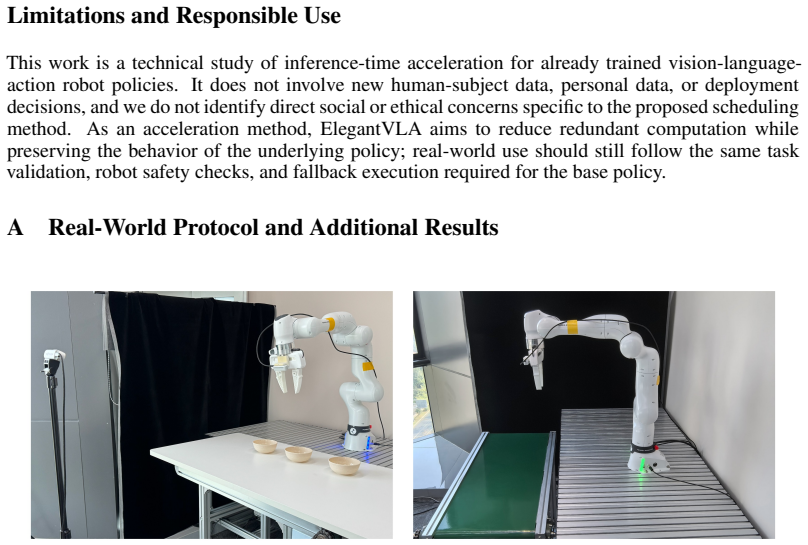
Rongyu Zhang, Menghang Dong, Y uan Zhang, Liang Heng, Xiaowei Chi, Gaole Dai, Li Du, Dan Wang, Y uan Du, and Shanghang Zhang. Mole-vla: Dynamic layer-skipping vision lan- guage action model via mixture-of-layers for efficient robot manipulation. arXiv preprint arXiv:2503.20384, 2025. 12 Limitations and Responsible Use This work is a technical study of infe...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.