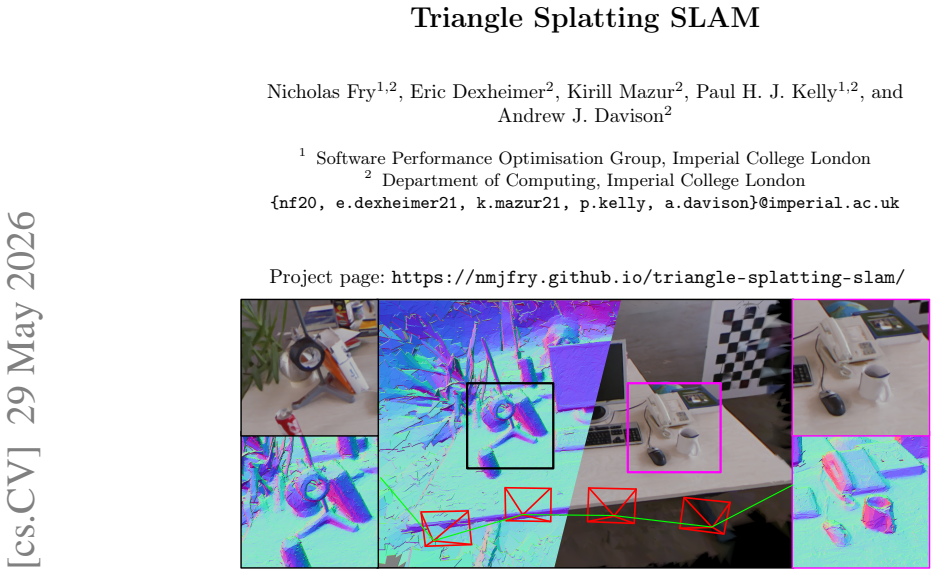
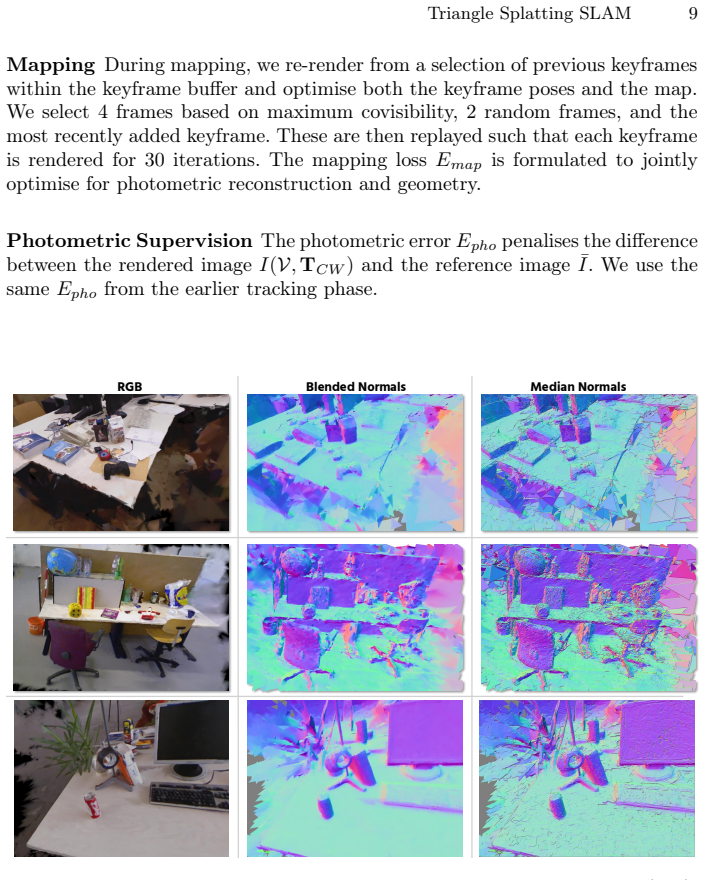
Triangle Splatting SLAM
Pith reviewed 2026-06-28 22:31 UTC · model grok-4.3
The pith
A dense RGB-D SLAM system using differentiable triangles matches tracking accuracy while improving 3D geometry and enabling online mesh editing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
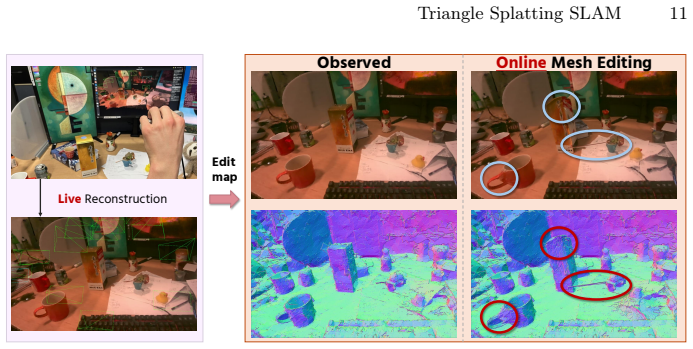
We present the first dense SLAM system to employ Triangle Splatting to perform both tracking and mapping through online differentiable rendering of a triangle soup. The map can be converted into a connected mesh on-the-fly via restricted Delaunay triangulation, enabling new online capabilities such as mesh deformation and collision checking. On Replica and TUM-RGBD, our system outperforms baselines on 3D geometry, matches the camera-tracking accuracy, and enables online mesh-based scene editing.
What carries the argument
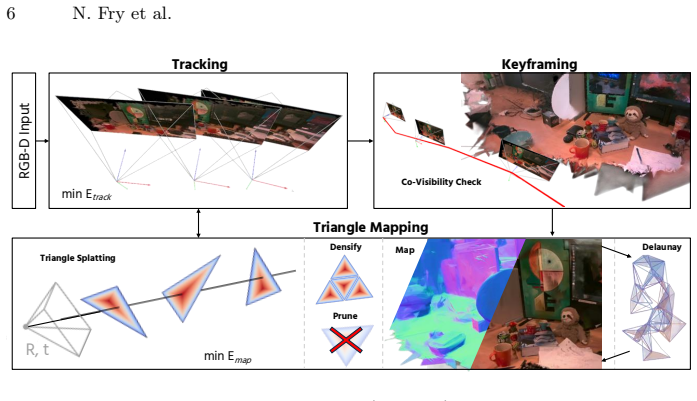
Triangle splatting: differentiable rendering of an unstructured triangle soup that permits gradient-based optimization of triangle geometry and appearance from posed RGB-D frames.
Load-bearing premise
An unstructured triangle soup can be optimized online through differentiable rendering to produce photorealistic results, and restricted Delaunay triangulation can be performed on-the-fly without breaking real-time performance or map consistency.
What would settle it
If the system is run on the Replica dataset and produces no measurable improvement in 3D geometry accuracy or completeness metrics over Gaussian Splatting SLAM baselines, or if the on-the-fly triangulation step prevents sustained real-time frame rates.
Figures

read the original abstract
We present a dense RGB-D SLAM system using differentiable triangles as the 3D map representation. While 3D Gaussian Splatting has emerged as the leading method for novel-view synthesis, triangles remain the standard primitive for traditional rendering hardware, game engines, and downstream tasks requiring explicit geometry such as simulation, collision, and editing. Recent offline methods have demonstrated that an unstructured 'triangle soup' can be optimised into a photorealistic mesh via Delaunay triangulation across a set of posed images. Building upon this insight, we present the first dense SLAM system to employ Triangle Splatting to perform both tracking and mapping through online differentiable rendering of a triangle soup. The map can be converted into a connected mesh on-the-fly via restricted Delaunay triangulation, enabling new online capabilities such as mesh deformation and collision checking. On Replica and TUM-RGBD, our system outperforms baselines on 3D geometry, matches the camera-tracking accuracy, and enables online mesh-based scene editing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Triangle Splatting SLAM, the first dense RGB-D SLAM system to represent the map as an unstructured triangle soup that is optimized online via differentiable rendering for both camera tracking and mapping. Restricted Delaunay triangulation is performed on-the-fly to convert the soup into a connected mesh, enabling online mesh deformation, collision checking, and editing. On Replica and TUM-RGBD the system is claimed to outperform baselines on 3D geometry reconstruction while matching camera-tracking accuracy.
Significance. If the empirical results hold, the work supplies an explicit-mesh alternative to 3D Gaussian Splatting that remains compatible with standard rendering hardware and downstream geometric tasks. The combination of online differentiable optimization with on-the-fly triangulation is a substantive engineering contribution; the stress-test concern about real-time stability of the triangle soup and restricted Delaunay step does not appear to undermine the central claims once the reported timing benchmarks and ablation studies are taken into account.
minor comments (2)
- [Abstract] Abstract: the claim of outperformance on 3D geometry is stated without any numerical values; adding the key metrics (e.g., reconstruction error or IoU) would improve immediate readability even though the full results section presumably contains the supporting tables.
- The manuscript should explicitly state the frame rate achieved during joint tracking-plus-mapping and during the on-the-fly triangulation step so that the real-time claim can be directly verified against the reported benchmarks.
Simulated Author's Rebuttal
We thank the referee for the positive review and recommendation of minor revision. The provided summary correctly captures the core contributions of Triangle Splatting SLAM as an online dense RGB-D system using differentiable triangle-soup rendering with on-the-fly restricted Delaunay triangulation.
Circularity Check
No significant circularity; engineering system with empirical support
full rationale
The manuscript describes a practical SLAM pipeline built on differentiable rendering of triangle soups and on-the-fly restricted Delaunay triangulation. No equations, closed-form derivations, or parameter-fitting steps are shown that reduce by construction to the inputs. Claims of outperforming baselines on geometry and enabling mesh editing rest on reported Replica/TUM-RGBD experiments and timing benchmarks rather than any self-referential mathematical identity. A single minor self-citation to prior offline triangle-soup work is present but is not load-bearing for the central online-SLAM contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: IEEE Conf
Barron, J.T., Mildenhall, B., Verbin, D., Srinivasan, P.P., Hedman, P.: Mip-NeRF 360: Unbounded anti-aliased neural radiance fields. In: IEEE Conf. Comput. Vis. Pattern Recog. (2022)
2022
-
[2]
In: Proceedings of SIGGRAPH (1996)
Curless, B., Levoy, M.: A volumetric method for building complex models from range images. In: Proceedings of SIGGRAPH (1996)
1996
-
[3]
Fang, G., Wang, B.: Mini-Splatting: Representing scenes with a constrained num- ber of Gaussians. In: Eur. Conf. Comput. Vis. (2024)
2024
-
[4]
Govindarajan, S., Rebain, D., Yi, K.M., Tagliasacchi, A.: Radiant Foam: Real-time differentiable ray tracing. In: Int. Conf. Comput. Vis. (2025)
2025
-
[5]
ACM Trans
Guédon, A., Gomez, D., Maruani, N., Gong, B., Drettakis, G., Ovsjanikov, M.: MILo: Mesh-in-the-loop Gaussian splatting for detailed and efficient surface recon- struction. ACM Trans. Graph. (2025)
2025
-
[6]
In: IEEE Conf
Hahlbohm, F., Franke, L., Eisemann, M., Magnor, M.: Faster-GS: Analyzing and improving Gaussian splatting optimization. In: IEEE Conf. Comput. Vis. Pattern Recog. (2026)
2026
-
[7]
In: IEEE Conf
Held, J., Son, S., Vandeghen, R., Rebain, D., Gadelha, M., Zhou, Y., Cioppa, A., Lin, M.C., Van Droogenbroeck, M., Tagliasacchi, A.: MeshSplatting: Differentiable rendering with opaque meshes. In: IEEE Conf. Comput. Vis. Pattern Recog. (2026)
2026
-
[8]
Held, J., Vandeghen, R., Deliege, A., Hamdi, A., Rebain, D., Giancola, S., Cioppa, A.,Vedaldi,A.,Ghanem,B.,Tagliasacchi,A.,etal.:Trianglesplattingforreal-time radiance field rendering. In: Int. Conf. 3D Vis. (2025)
2025
-
[9]
In: Proceedings of SIGGRAPH (2024)
Huang, B., Yu, Z., Chen, A., Geiger, A., Gao, S.: 2D Gaussian splatting for geo- metrically accurate radiance fields. In: Proceedings of SIGGRAPH (2024)
2024
-
[10]
In: IEEE Conf
Johari, M.M., Carta, C., Fleuret, F.: ESLAM: Efficient dense SLAM system based on hybrid representation of signed distance fields. In: IEEE Conf. Comput. Vis. Pattern Recog. (2023)
2023
-
[11]
In: IEEE Conf
Keetha,N., Karhade, J., Jatavallabhula, K.M., Yang, G., Scherer, S., Ramanan, D., Luiten, J.: SplaTAM: Splat, track & map 3D Gaussians for dense RGB-D SLAM. In: IEEE Conf. Comput. Vis. Pattern Recog. (2024)
2024
-
[12]
Keller, M., Lefloch, D., Lambers, M., Izadi, S., Weyrich, T., Kolb, A.: Real-time 3D reconstruction in dynamic scenes using point-based fusion. In: Int. Conf. 3D Vis. (2013)
2013
-
[13]
ACM Trans
Kerbl, B., Kopanas, G., Leimkühler, T., Drettakis, G.: 3D Gaussian splatting for real-time radiance field rendering. ACM Trans. Graph. (2023)
2023
-
[14]
In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2007)
Klein, G., Murray, D.: Parallel tracking and mapping for small AR workspaces. In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2007)
2007
-
[15]
Leroy, V., Cabon, Y., Revaud, J.: Grounding image matching in 3D with MASt3R. In: Eur. Conf. Comput. Vis. (2024)
2024
-
[16]
Master’s thesis, Uni- versity of Utah (1987)
Loop, C.T.: Smooth Subdivision Surfaces Based on Triangles. Master’s thesis, Uni- versity of Utah (1987)
1987
-
[17]
In: Proceedings of SIGGRAPH (1987)
Lorensen, W.E., Cline, H.E.: Marching cubes: A high resolution 3D surface con- struction algorithm. In: Proceedings of SIGGRAPH (1987)
1987
-
[18]
In: IEEE Conf
Mai, A., Hedstrom, T., Kopanas, G., Kontkanen, J., Kuester, F., Barron, J.T.: Ra- diance meshes for volumetric reconstruction. In: IEEE Conf. Comput. Vis. Pattern Recog. (2026)
2026
-
[19]
In: Proceedings of SIGGRAPH Asia (2024) 18 N
Mallick, S.S., Goel, R., Kerbl, B., Steinberger, M., Carrasco, F.V., De La Torre, F.: Taming 3DGS: High-quality radiance fields with limited resources. In: Proceedings of SIGGRAPH Asia (2024) 18 N. Fry et al
2024
-
[20]
In: IEEE Conf
Matsuki, H., Bae, G., Davison, A.J.: 4DTAM: Non-rigid tracking and mapping via dynamic surface Gaussians. In: IEEE Conf. Comput. Vis. Pattern Recog. (2025)
2025
-
[21]
In: IEEE Conf
Matsuki, H., Murai, R., Kelly, P.H., Davison, A.J.: Gaussian Splatting SLAM. In: IEEE Conf. Comput. Vis. Pattern Recog. (2024)
2024
-
[22]
Mildenhall, B., Srinivasan, P.P., Tancik, M., Barron, J.T., Ramamoorthi, R., Ng, R.: NeRF: Representing scenes as neural radiance fields for view synthesis. In: Eur. Conf. Comput. Vis. (2020)
2020
-
[23]
ACM Trans
Müller, T., Evans, A., Schied, C., Keller, A.: Instant neural graphics primitives with a multiresolution hash encoding. ACM Trans. Graph. (2022)
2022
-
[24]
IEEE Transactions on Robotics (T-RO) (2017)
Mur-Artal, R., Tardós, J.D.: ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras. IEEE Transactions on Robotics (T-RO) (2017)
2017
-
[25]
In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2011)
Newcombe, R.A., Izadi, S., Hilliges, O., Molyneaux, D., Kim, D., Davison, A.J., Kohi, P., Shotton, J., Hodges, S., Fitzgibbon, A.: KinectFusion: Real-time dense surface mapping and tracking. In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2011)
2011
-
[26]
ACM Trans
Nießner, M., Zollhöfer, M., Izadi, S., Stamminger, M.: Real-time 3D reconstruction at scale using voxel hashing. ACM Trans. Graph. (2013)
2013
-
[27]
Pehlivan, H., Boscolo Camiletto, A., Foo, L.G., Habermann, M., Theobalt, C.: Matrix-free second-order optimization of Gaussian splats with residual sampling. In: Int. Conf. 3D Vis. (2026)
2026
-
[28]
Oswald, M.: Point-SLAM: Dense neural point cloud-based SLAM
Sandström, E., Li, Y., Van Gool, L., R. Oswald, M.: Point-SLAM: Dense neural point cloud-based SLAM. In: Int. Conf. Comput. Vis. (2023)
2023
-
[29]
In: IEEE Conf
Schöps, T., Sattler, T., Pollefeys, M.: BAD SLAM: Bundle adjusted direct RGB-D SLAM. In: IEEE Conf. Comput. Vis. Pattern Recog. (2019)
2019
-
[30]
IEEE Trans
Schöps, T., Sattler, T., Pollefeys, M.: SurfelMeshing: Online surfel-based mesh reconstruction. IEEE Trans. Pattern Anal. Mach. Intell. (2019)
2019
-
[31]
Shen, T., Gao, J., Yin, K., Liu, M.Y., Fidler, S.: Deep Marching Tetrahedra: a hy- brid representation for high-resolution 3D shape synthesis. In: Adv. Neural Inform. Process. Syst. (2021)
2021
-
[32]
A micro lie theory for state estimation in robotics.arXiv preprint arXiv:1812.01537, 2018
Sola, J., Deray, J., Atchuthan, D.: A micro lie theory for state estimation in robotics. arXiv preprint arXiv:1812.01537 (2018)
-
[33]
Sucar, E., Liu, S., Ortiz, J., Davison, A.J.: iMAP: Implicit mapping and positioning in real-time. In: Int. Conf. Comput. Vis. (2021)
2021
-
[34]
Tao, Y., Muñoz-Bañón, M.Á., Zhang, L., Wang, J., Fu, L.F.T., Fallon, M.: The Oxford spires dataset: Benchmarking large-scale LiDAR-visual localisation, recon- struction and radiance field methods. Int. J. Robot. Res. (2025)
2025
-
[35]
In: IEEE Conf
Tojo, K., Bickel, B., Umetani, N.: DiffSoup: Direct differentiable rasterization of triangle soup for extreme radiance field simplification. In: IEEE Conf. Comput. Vis. Pattern Recog. (2026)
2026
-
[36]
In: IEEE Int
Whelan, T., Johannsson, H., Kaess, M., Leonard, J.J., McDonald, J.: Robust real- time visual odometry for dense RGB-D mapping. In: IEEE Int. Conf. Robot. Au- tom. (2013)
2013
-
[37]
In: Proceedings of Robotics: Science and Systems (RSS) (2015)
Whelan, T., Leutenegger, S., Salas-Moreno, R.F., Glocker, B., Davison, A.J.: Elas- ticFusion: Dense SLAM without a pose graph. In: Proceedings of Robotics: Science and Systems (RSS) (2015)
2015
-
[38]
In: IEEE Conf
Yan, C., Qu, D., Xu, D., Zhao, B., Wang, Z., Wang, D., Li, X.: GS-SLAM: Dense visual SLAM with 3D Gaussian splatting. In: IEEE Conf. Comput. Vis. Pattern Recog. (2024) Triangle Splatting SLAM 19
2024
-
[39]
In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2022)
Yang, X., Li, H., Zhai, H., Ming, Y., Liu, Y., Zhang, G.: Vox-Fusion: Dense tracking and mapping with voxel-based neural implicit representation. In: Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR) (2022)
2022
-
[40]
ACM Trans
Yu, Z., Sattler, T., Geiger, A.: Gaussian Opacity Fields: Efficient adaptive surface reconstruction in unbounded scenes. ACM Trans. Graph. (2024)
2024
-
[41]
Zhu, Z., Peng, S., Larsson, V., Xu, W., Bao, H., Cui, Z., Oswald, M.R., Pollefeys, M.: NICE-SLAM: Neural implicit scalable encoding for SLAM. In: IEEE Conf. Comput. Vis. Pattern Recog. (2022) 20 N. Fry et al. Supplementary Material A Geometry Analysis We provide further details on our geometry evaluation. The ground truth mesh is generated by running TSDF...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.