ROG-Grasp: Root-Oriented Geometry for Robotic Grasping and Placement
Pith reviewed 2026-06-28 19:08 UTC · model grok-4.3
The pith
Root-oriented geometry from RGB-D point clouds enables reliable, orientation-aware robotic grasping and placement of produce.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
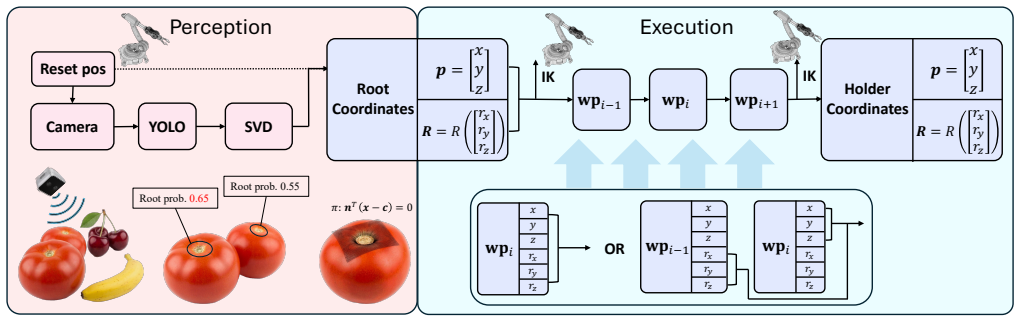
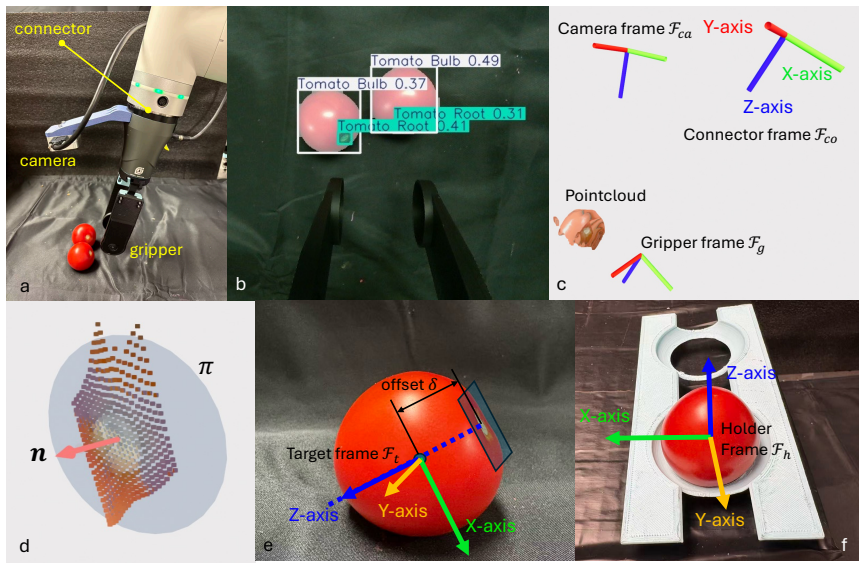
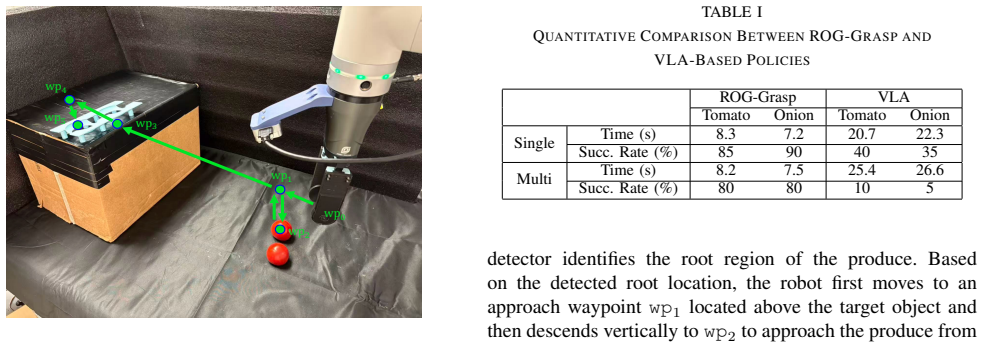
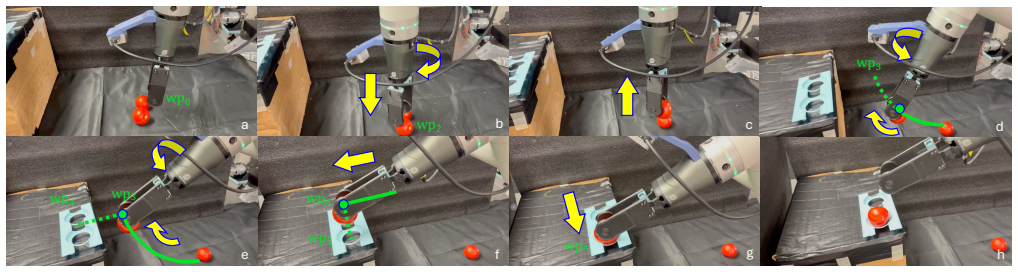
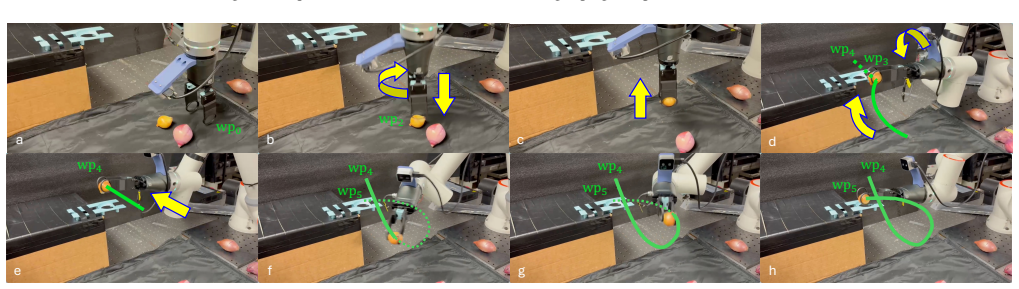
ROG-Grasp estimates the produce orientation from root surface geometry using a YOLO-based root detector and point cloud plane fitting to infer the root normal. This enables stable grasp pose generation and orientation-constrained Cartesian motion planning, leading to high success rates and stable execution times on tomatoes and onions in isolated and cluttered scenarios, with more reliable and accurate grasp completion and faster execution than vision-language-action policies.
What carries the argument
Root normal inference from YOLO root detection combined with plane fitting on RGB-D point clouds, which determines the produce orientation used for grasp planning and constrained motion.
If this is right
- High success rates for grasping and placement in isolated and cluttered scenarios.
- Stable execution times for orientation-controlled manipulation tasks.
- More reliable and accurate grasp completion compared to vision-language-action policies.
- Faster execution than VLA policies for the same tasks.
Where Pith is reading between the lines
- Similar root-oriented perception could apply to other agricultural items where orientation matters for packaging or processing.
- Integrating this geometric method with learned policies might improve overall robustness in varying conditions.
- The approach relies on clear root visibility, suggesting potential for extension to occluded or varied produce shapes.
Load-bearing premise
Root surface geometry from RGB-D point clouds can be reliably inferred via YOLO detection and plane fitting to determine produce orientation for grasp planning.
What would settle it
Demonstrating cases where YOLO root detection fails or plane fitting produces incorrect normals, resulting in unstable grasps or incorrect orientations.
Figures

read the original abstract
Orientation-aware manipulation is essential in post-harvest agricultural processing, where produce must be grasped and placed in consistent configurations. This paper presents ROG-Grasp, a geometry-based robotic grasping and placement framework that estimates the produce orientation from root surface geometry using RGB-D perception. A YOLO-based root detector and point cloud plane fitting are used to infer the root normal, enabling stable grasp pose generation and orientation-constrained Cartesian motion planning. Experiments on tomatoes and onions demonstrate high success rates and stable execution time in both isolated and cluttered scenarios. Compared with vision-language-action (VLA) policies, the proposed method achieves more reliable and accurate grasp completion with faster execution. These results highlight the effectiveness of geometry-driven perception for practical orientation-controlled manipulation tasks. A video of our paper is available online https://youtu.be/Ir2UtGODdMo.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents ROG-Grasp, a geometry-based robotic grasping and placement framework for agricultural produce (tomatoes, onions) that detects the root via YOLO on RGB-D images, fits a plane to the corresponding point cloud to recover the root normal, and uses the resulting orientation to generate stable grasp poses and execute Cartesian motion plans with orientation constraints. Experiments in isolated and cluttered scenes are reported to yield high success rates with faster execution than vision-language-action (VLA) policies.
Significance. If the quantitative claims hold, the work supplies a lightweight, interpretable, and training-data-efficient alternative to end-to-end learned policies for orientation-controlled manipulation tasks that arise in post-harvest processing; the explicit use of surface geometry rather than learned priors is a clear methodological strength.
major comments (3)
- [Abstract] Abstract: the central claim that the method 'achieves more reliable and accurate grasp completion with faster execution' than VLA policies is stated without any numerical success rates, timing values, error bars, trial counts, or statistical comparisons, so the performance advantage cannot be assessed.
- [Methods (root detection and plane fitting)] Root normal inference step (YOLO detection + plane fitting on RGB-D points): no quantitative orientation error (e.g., angular deviation of the fitted normal), no ablation on plane-fitting robustness to occlusion or non-planar roots, and no failure-mode analysis are supplied, yet this step directly determines the grasp pose and motion constraints that underpin the orientation-aware claim.
- [Experiments] Experimental section: the manuscript supplies neither dataset sizes, number of grasp trials, nor any comparison table or statistical test against the VLA baseline, leaving the reported 'high success rates' and 'stable execution time' unsupported.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify areas where additional quantitative details are needed to support our claims. We will revise the manuscript to incorporate these elements.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the method 'achieves more reliable and accurate grasp completion with faster execution' than VLA policies is stated without any numerical success rates, timing values, error bars, trial counts, or statistical comparisons, so the performance advantage cannot be assessed.
Authors: We agree that the abstract lacks specific numerical support for the performance claims. In the revised version, we will update the abstract to include key quantitative results such as success rates, execution times, trial counts, and references to statistical comparisons from the experiments. revision: yes
-
Referee: [Methods (root detection and plane fitting)] Root normal inference step (YOLO detection + plane fitting on RGB-D points): no quantitative orientation error (e.g., angular deviation of the fitted normal), no ablation on plane-fitting robustness to occlusion or non-planar roots, and no failure-mode analysis are supplied, yet this step directly determines the grasp pose and motion constraints that underpin the orientation-aware claim.
Authors: We acknowledge this limitation in the current manuscript. The revised paper will add quantitative evaluation of the orientation error for the root normal, an ablation study on the plane fitting step's robustness, and an analysis of failure modes. revision: yes
-
Referee: [Experiments] Experimental section: the manuscript supplies neither dataset sizes, number of grasp trials, nor any comparison table or statistical test against the VLA baseline, leaving the reported 'high success rates' and 'stable execution time' unsupported.
Authors: We agree that more detailed experimental reporting is required. We will revise the experimental section to include dataset sizes, the number of grasp trials performed, a comparison table with the VLA baseline, and the results of appropriate statistical tests. revision: yes
Circularity Check
No circularity; purely empirical method with no derivation chain
full rationale
The paper describes an empirical pipeline (YOLO root detection + plane fitting on RGB-D points to obtain normals, followed by grasp planning and motion constraints) and reports experimental success rates on tomatoes/onions versus VLA baselines. No equations, fitted parameters, uniqueness theorems, or self-citations appear in the provided text. The central claims rest on direct hardware trials rather than any reduction of a prediction to its own inputs. This is self-contained empirical work; the reader's circularity score of 0.0 is confirmed.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Automatic fruit picking technology: A comprehensive review of research advances,
J. Zhang, N. Kang, Q. Qu, L. Zhou, and H. Zhang, “Automatic fruit picking technology: A comprehensive review of research advances,” Artificial Intelligence Review, vol. 57, no. 3, p. 54, 2024
2024
-
[2]
A review of visual perception technology for intelligent fruit harvesting robots,
Y . Huang, S. Xu, H. Chen, G. Li, H. Dong, J. Yu, X. Zhang, and R. Chen, “A review of visual perception technology for intelligent fruit harvesting robots,”Frontiers in Plant Science, vol. 16, p. 1646871, 2025
2025
-
[3]
A review of research on fruit and vegetable picking robots based on deep learning,
Y . Tan, X. Liu, J. Zhang, Y . Wang, and Y . Hu, “A review of research on fruit and vegetable picking robots based on deep learning,”Sensors, vol. 25, no. 12, p. 3677, 2025
2025
-
[4]
A review on the recent developments in vision-based apple-harvesting robots for recognizing fruit and picking pose,
Y . Zhang, N. Li, L. Zhang, J. Lin, X. Gao, and G. Chen, “A review on the recent developments in vision-based apple-harvesting robots for recognizing fruit and picking pose,”Computers and Electronics in Agriculture, vol. 231, p. 109968, 2025
2025
-
[5]
Recognition and localization methods for vision-based fruit picking robots: A review,
Y . Tang, M. Chen, C. Wang, L. Luo, J. Li, G. Lian, and X. Zou, “Recognition and localization methods for vision-based fruit picking robots: A review,”Frontiers in plant science, vol. 11, p. 510, 2020
2020
-
[6]
A survey of robotic harvesting systems and enabling technologies,
L. Droukas, Z. Doulgeri, N. L. Tsakiridis, D. Triantafyllou, I. Kleitsio- tis, I. Mariolis, D. Giakoumis, D. Tzovaras, D. Kateris, and D. Bochtis, “A survey of robotic harvesting systems and enabling technologies,” Journal of Intelligent & Robotic Systems, vol. 107, no. 2, p. 21, 2023
2023
-
[7]
An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation,
Y . Xiong, Y . Ge, L. Grimstad, and P. J. From, “An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation,”Journal of Field Robotics, vol. 37, no. 2, pp. 202– 224, 2020
2020
-
[8]
Design and evaluation of a novel cable-driven gripper with perception capabilities for strawberry picking robots,
Y . Xiong, P. J. From, and V . Isler, “Design and evaluation of a novel cable-driven gripper with perception capabilities for strawberry picking robots,” in2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2018, pp. 7384–7391
2018
-
[9]
Robotic complex for harvesting apple crops,
O. Krakhmalev, S. Gataullin, E. Boltachev, S. Korchagin, I. Blagoveshchensky, and K. Liang, “Robotic complex for harvesting apple crops,”Robotics, vol. 11, no. 4, p. 77, 2022
2022
-
[10]
S. Ansari, M. K. Gohil, Y . Maeda, and B. Bhattacharya, “A novel ap- proach to tomato harvesting using a hybrid gripper with semantic seg- mentation and keypoint detection,”arXiv preprint arXiv:2512.03684, 2025
-
[11]
The adoption of robotics in pack houses for fresh produce handling,
B. J. Mulholland, P. S. Panesar, and P. H. Johnson, “The adoption of robotics in pack houses for fresh produce handling,”The Journal of Horticultural Science and Biotechnology, vol. 99, no. 1, pp. 9–19, 2024
2024
-
[12]
Fruit sorting robot based on color and size for an agricultural product packaging system,
T. Dewi, P. Risma, and Y . Oktarina, “Fruit sorting robot based on color and size for an agricultural product packaging system,”Bulletin of Electrical Engineering and Informatics, vol. 9, no. 4, pp. 1438– 1445, 2020
2020
-
[13]
Multi-arm robotic system and strategy for the automatic packaging of apples,
Y . Zhang, L. Chen, X. Li, Q. Li, and J. Li, “Multi-arm robotic system and strategy for the automatic packaging of apples,”Artificial Intelligence in Agriculture, 2025
2025
-
[14]
Understanding decision making for automation in packhouse and human capital requirement
O. B. Oladele, “Understanding decision making for automation in packhouse and human capital requirement.”
-
[15]
Panoptic mapping with fruit completion and pose estimation for horticultural robots,
Y . Pan, F. Magistri, T. L¨abe, E. Marks, C. Smitt, C. McCool, J. Behley, and C. Stachniss, “Panoptic mapping with fruit completion and pose estimation for horticultural robots,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 4226–4233
2023
-
[16]
Multi-vision-based picking point localisation of target fruit for harvesting robots,
C. Beldek, A. Dunn, J. Cunningham, E. Sariyildiz, S. Phung, and G. Alici, “Multi-vision-based picking point localisation of target fruit for harvesting robots,” in2025 IEEE International Conference on Mechatronics (ICM). IEEE, 2025, pp. 1–6
2025
-
[17]
Geometry-aware fruit grasping estimation for robotic harvesting in apple orchards,
X. Wang, H. Kang, H. Zhou, W. Au, and C. Chen, “Geometry-aware fruit grasping estimation for robotic harvesting in apple orchards,” Computers and Electronics in Agriculture, vol. 193, p. 106716, 2022
2022
-
[18]
High-precision fruit localization using active laser-camera scanning: Robust laser line extraction for 2d-3d transformation,
P. Chu, Z. Li, K. Zhang, K. Lammers, and R. Lu, “High-precision fruit localization using active laser-camera scanning: Robust laser line extraction for 2d-3d transformation,”Smart Agricultural Technology, vol. 7, p. 100391, 2024
2024
-
[19]
Direction identification system of garlic clove based on machine vision,
G. Chi and G. Hui, “Direction identification system of garlic clove based on machine vision,”TELKOMNIKA Indonesian Journal of Electrical Engineering, vol. 11, no. 5, pp. 2323–2329, 2013
2013
-
[20]
Design and experiment of a garlic orientation and orderly conveying device based on machine vision,
J. Chen, C. Yu, K. Yao, Y . Zhou, and B. Zhou, “Design and experiment of a garlic orientation and orderly conveying device based on machine vision,”Agriculture, vol. 12, no. 8, p. 1077, 2022
2022
-
[21]
Determination of garlic clove orientation based on capacitive sensing technology,
L. Fang, K. Zhou, T. Li, J. Hou, and Y . Li, “Determination of garlic clove orientation based on capacitive sensing technology,”Computers and Electronics in Agriculture, vol. 219, p. 108827, 2024
2024
-
[22]
Design and experiment of adjustment device based on machine vision for garlic clove direction,
Y . Li, Y . Wu, T. Li, Z. Niu, and J. Hou, “Design and experiment of adjustment device based on machine vision for garlic clove direction,” Computers and Electronics in Agriculture, vol. 174, p. 105513, 2020
2020
-
[23]
CLAW: A Vision-Language-Action Framework for Weight-Aware Robotic Grasping
Z. An, R. Yang, Y . Feng, and L. Zhou, “Claw: A vision-language- action framework for weight-aware robotic grasping,”arXiv preprint arXiv:2509.14143, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[24]
arXiv preprint arXiv:2509.14138 (2025)
R. Yang, Z. An, L. Zhou, and Y . Feng, “Seqvla: Sequential task ex- ecution for long-horizon manipulation with completion-aware vision- language-action model,”arXiv preprint arXiv:2509.14138, 2025
- [25]
-
[26]
Vla-grasp: a vision-language- action modeling with cross-modality fusion for task-oriented grasp- ing,
J. Zhu, X. Sun, Q. Zhang, and M. Liu, “Vla-grasp: a vision-language- action modeling with cross-modality fusion for task-oriented grasp- ing,”Complex & Intelligent Systems, vol. 11, no. 6, p. 272, 2025
2025
-
[27]
A review of yolo algorithm developments,
P. Jiang, D. Ergu, F. Liu, Y . Cai, and B. Ma, “A review of yolo algorithm developments,”Procedia computer science, vol. 199, pp. 1066–1073, 2022
2022
-
[28]
Comprehensive performance evaluation of yolov12, yolo11, yolov10, yolov9 and yolov8 on detecting and counting fruitlet in complex orchard environments,
R. Sapkota, Z. Meng, M. Churuvija, X. Du, Z. Ma, and M. Karkee, “Comprehensive performance evaluation of yolov12, yolo11, yolov10, yolov9 and yolov8 on detecting and counting fruitlet in complex orchard environments,”Agriculture Communications, p. 100125, 2026
2026
-
[29]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichteret al., “π 0: A vision-language-action flow model for general robot control. corr, abs/2410.24164, 2024. doi: 10.48550,”arXiv preprint ARXIV .2410.24164
work page internal anchor Pith review Pith/arXiv arXiv 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.