From Cues to Horizons: Dynamic Risk Horizon Profiling for Trajectory Prediction
Pith reviewed 2026-06-28 18:20 UTC · model grok-4.3
The pith
A continuous learnable potential field in the risk horizon profiling module profiles future risk distributions from object proximity to improve vehicle trajectory prediction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
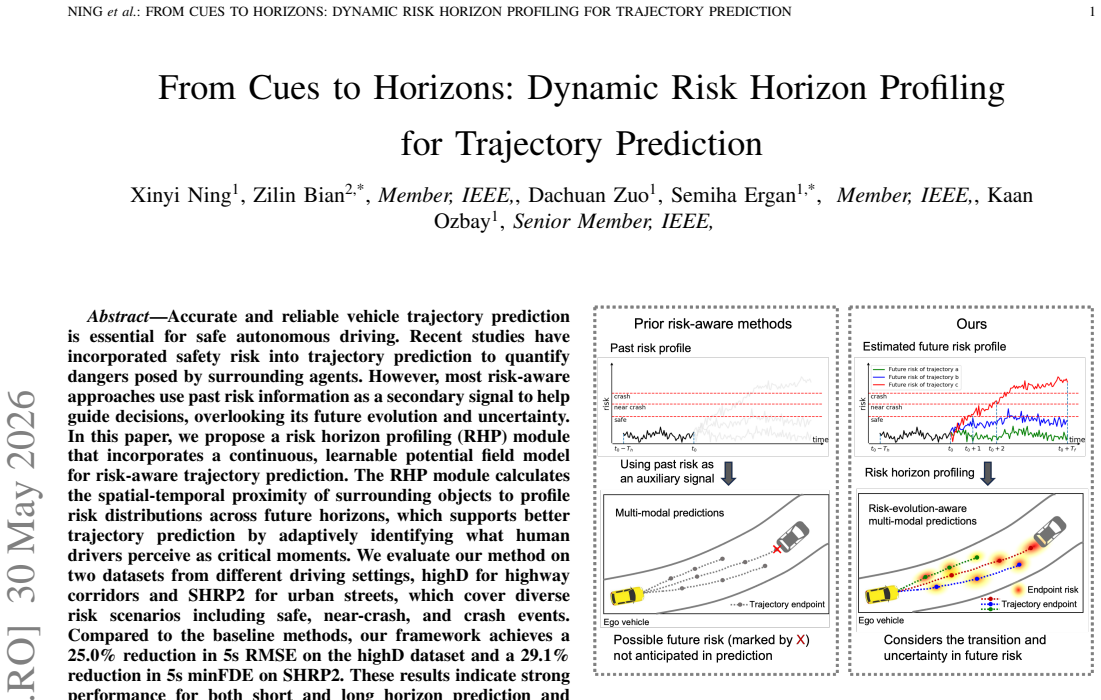
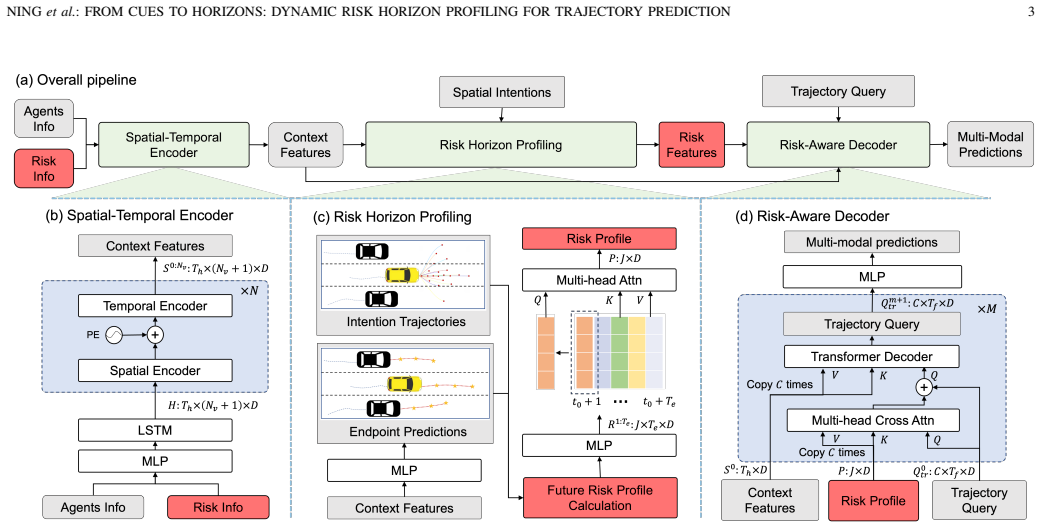
The RHP module incorporates a continuous, learnable potential field model for risk-aware trajectory prediction. The module calculates the spatial-temporal proximity of surrounding objects to profile risk distributions across future horizons, which supports better trajectory prediction by adaptively identifying what human drivers perceive as critical moments.
What carries the argument
The risk horizon profiling (RHP) module with its continuous learnable potential field model, which computes spatial-temporal proximity to generate risk profiles over future horizons.
If this is right
- The method produces a 25.0% reduction in 5s RMSE on the highD highway dataset relative to baselines.
- The method produces a 29.1% reduction in 5s minFDE on the SHRP2 urban dataset relative to baselines.
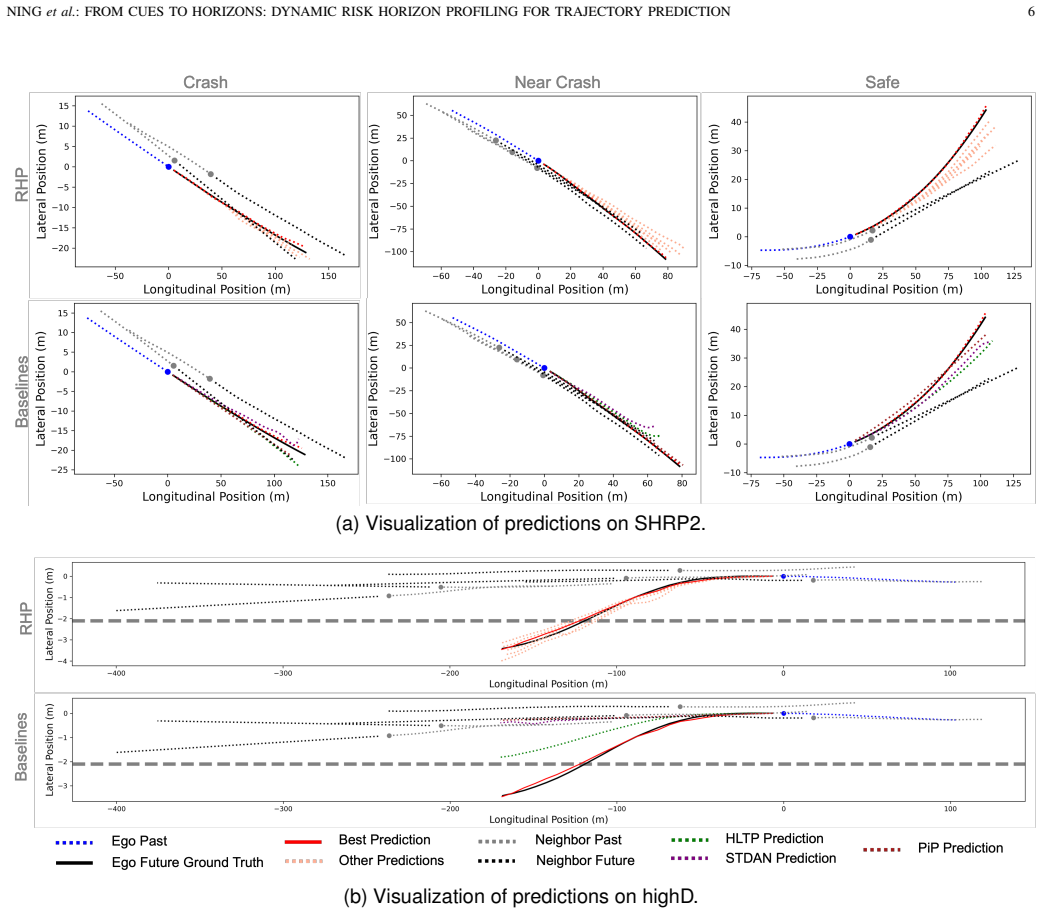
- The approach improves both short-horizon and long-horizon predictions across safe, near-crash, and crash events.
- The resulting predictions support more realistic autonomous vehicle path planning and strategic selection in diverse settings.
Where Pith is reading between the lines
- The same proximity-to-risk mapping could be inserted as a modular add-on to other existing trajectory predictors without changing their core architectures.
- Extending the horizon profiling to include uncertainty quantification over risk profiles might further stabilize predictions in highly dynamic scenes.
- The urban-street gains on SHRP2 suggest the module could transfer to mixed-traffic environments where pedestrian and cyclist interactions dominate risk.
Load-bearing premise
The continuous learnable potential field model accurately captures what human drivers perceive as critical moments in risk scenarios.
What would settle it
Remove the learnable potential field from the RHP module and retrain on the same highD and SHRP2 splits; the claimed error reductions in 5s RMSE and minFDE should disappear if the field is the load-bearing component.
Figures


read the original abstract
Accurate and reliable vehicle trajectory prediction is essential for safe autonomous driving. Recent studies have incorporated safety risk into trajectory prediction to quantify dangers posed by surrounding agents. However, most risk-aware approaches use past risk information as a secondary signal to help guide decisions, overlooking its future evolution and uncertainty. In this paper, we propose a risk horizon profiling (RHP) module that incorporates a continuous, learnable potential field model for risk-aware trajectory prediction. The RHP module calculates the spatial-temporal proximity of surrounding objects to profile risk distributions across future horizons, which supports better trajectory prediction by adaptively identifying what human drivers perceive as critical moments. We evaluate our method on two datasets from different driving settings, highD for highway corridors and SHRP2 for urban streets, which cover diverse risk scenarios including safe, near-crash, and crash events. Compared to the baseline methods, our framework achieves a 25.0\% reduction in 5s RMSE on the highD dataset and a 29.1\% reduction in 5s minFDE on SHRP2. These results indicate strong performance for both short and long horizon prediction and robust generalization across highway and urban scenarios. The proposed method enables more realistic AV path planning and strategic selection, thereby supporting safer autonomous driving and more advanced driver-assistance systems. The source code for this work is available at: https://github.com/bilab-nyu/RHP
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a risk horizon profiling (RHP) module incorporating a continuous learnable potential field model to profile future risk distributions for vehicle trajectory prediction. The module computes spatial-temporal proximity of surrounding objects to identify critical risk moments over prediction horizons. Evaluation is performed on the highD highway dataset and SHRP2 urban dataset covering safe, near-crash, and crash scenarios, with reported gains of 25.0% reduction in 5s RMSE on highD and 29.1% reduction in 5s minFDE on SHRP2 versus baselines. Public code is provided at the cited GitHub repository.
Significance. If the empirical gains prove robust under detailed scrutiny, the work could meaningfully advance risk-aware prediction by shifting focus from past risk signals to explicit modeling of risk evolution and uncertainty across horizons. Use of two datasets spanning highway and urban settings with varied risk levels supports the generalization aspect. Public code availability is a clear positive for reproducibility in this empirical domain.
major comments (3)
- [Abstract] Abstract and Experiments section: The headline performance claims (25.0% 5s RMSE reduction on highD; 29.1% 5s minFDE on SHRP2) are stated without error bars, variance across runs, or statistical significance tests. This omission is load-bearing for the central empirical claim, as trajectory prediction metrics are known to exhibit high run-to-run variability.
- [Method] Method section: The continuous learnable potential field is introduced at a conceptual level but lacks the explicit functional form, parameterization of the field, or optimization procedure. Without these details it is impossible to determine whether the reported gains arise from the risk-profiling mechanism or from additional fitted parameters.
- [Experiments] Experiments section: No ablation studies isolating the RHP module are reported, and baseline methods are not described in sufficient detail (architecture, training protocol, or hyper-parameters). This prevents assessment of whether the stated improvements are attributable to the proposed risk horizon profiling.
minor comments (1)
- [Abstract] Abstract: The statement that the method shows 'strong performance for both short and long horizon prediction' is not supported by any quantitative short-horizon numbers.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript accordingly to improve clarity and rigor.
read point-by-point responses
-
Referee: [Abstract] Abstract and Experiments section: The headline performance claims (25.0% 5s RMSE reduction on highD; 29.1% 5s minFDE on SHRP2) are stated without error bars, variance across runs, or statistical significance tests. This omission is load-bearing for the central empirical claim, as trajectory prediction metrics are known to exhibit high run-to-run variability.
Authors: We agree this is a valid concern given known variability in these metrics. In the revised manuscript we will report standard deviations across multiple independent runs and include statistical significance tests (e.g., paired t-tests) for the headline improvements. revision: yes
-
Referee: [Method] Method section: The continuous learnable potential field is introduced at a conceptual level but lacks the explicit functional form, parameterization of the field, or optimization procedure. Without these details it is impossible to determine whether the reported gains arise from the risk-profiling mechanism or from additional fitted parameters.
Authors: The current manuscript presents the potential field at a high level. We will add the explicit functional form, parameterization details, and optimization procedure to the Method section. The publicly released code already implements these elements and can be cross-referenced. revision: yes
-
Referee: [Experiments] Experiments section: No ablation studies isolating the RHP module are reported, and baseline methods are not described in sufficient detail (architecture, training protocol, or hyper-parameters). This prevents assessment of whether the stated improvements are attributable to the proposed risk horizon profiling.
Authors: We will add ablation experiments that isolate the RHP module and expand the baseline descriptions to include architectures, training protocols, and hyper-parameters. These additions will clarify the source of the observed gains. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper presents an empirical method (RHP module with continuous learnable potential field) whose central claims are performance gains (25% 5s RMSE reduction on highD, 29.1% 5s minFDE on SHRP2) measured against baselines on two public datasets using standard supervised metrics. No derivation, equation, or uniqueness theorem is shown that reduces by construction to fitted parameters, self-citations, or renamed inputs. The learnable field is trained end-to-end and evaluated externally; results are not tautological to the model definition.
Axiom & Free-Parameter Ledger
free parameters (1)
- learnable parameters of potential field
invented entities (1)
-
continuous learnable potential field model
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Machine learning for autonomous vehicle’s trajectory prediction: A comprehensive survey, challenges, and future research directions,
V . Bharilya and N. Kumar, “Machine learning for autonomous vehicle’s trajectory prediction: A comprehensive survey, challenges, and future research directions,”Vehicular Communications, vol. 46, p. 100733, 2024
2024
-
[2]
Post-interactive multimodal trajectory prediction for autonomous driving,
Z. Huang, Y . Li, D. Li, Y . Mu, H. Qin, and N. Zheng, “Post-interactive multimodal trajectory prediction for autonomous driving,”arXiv preprint arXiv:2503.09366, 2025
-
[3]
arXiv preprint arXiv:1907.07792 (2019)
X. Li, X. Ying, and M. C. Chuah, “Grip++: Enhanced graph-based interaction-aware trajectory prediction for autonomous driving,”arXiv preprint arXiv:1907.07792, 2019
-
[4]
Ai-tp: Attention- based interaction-aware trajectory prediction for autonomous driving,
K. Zhang, L. Zhao, C. Dong, L. Wu, and L. Zheng, “Ai-tp: Attention- based interaction-aware trajectory prediction for autonomous driving,” IEEE Transactions on Intelligent Vehicles, vol. 8, no. 1, pp. 73–83, 2022
2022
-
[5]
Ise-gt: In- teraction strength-enhanced graph transformer for explainable multi- agent trajectory prediction,
Z. Gao, D. Liu, H. Hu, F. Gao, R. Zhao, and T. Yu, “Ise-gt: In- teraction strength-enhanced graph transformer for explainable multi- agent trajectory prediction,”Transportation Research Part C: Emerging Technologies, vol. 179, p. 105296, 2025
2025
-
[6]
Context-aware trajectory prediction for autonomous driving in heterogeneous environments,
Z. Li, Z. Chen, Y . Li, and C. Xu, “Context-aware trajectory prediction for autonomous driving in heterogeneous environments,”Computer-Aided Civil and Infrastructure Engineering, vol. 39, no. 1, pp. 120–135, 2024
2024
-
[7]
Bat: Behavior-aware human-like trajectory prediction for autonomous driv- ing,
H. Liao, Z. Li, H. Shen, W. Zeng, D. Liao, G. Li, and C. Xu, “Bat: Behavior-aware human-like trajectory prediction for autonomous driv- ing,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 9, 2024, pp. 10 332–10 340
2024
-
[8]
Dual transformer based prediction for lane change intentions and trajectories in mixed traffic environment,
K. Gao, X. Li, B. Chen, L. Hu, J. Liu, R. Du, and Y . Li, “Dual transformer based prediction for lane change intentions and trajectories in mixed traffic environment,”IEEE Transactions on Intelligent Trans- portation Systems, vol. 24, no. 6, pp. 6203–6216, 2023
2023
-
[9]
Interaction-aware cut-in trajectory prediction and risk assessment in mixed traffic,
X. Zhu, W. Hu, Z. Deng, J. Zhang, F. Hu, R. Zhou, K. Li, and F.-Y . Wang, “Interaction-aware cut-in trajectory prediction and risk assessment in mixed traffic,”IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 10, pp. 1752–1762, 2022
2022
-
[10]
Incorpo- rating safety field theory into interactive trajectory prediction between vru and vehicle: An integrated spatial–temporal and risk-aware model,
D. Zhu, Z. Fan, W. Ma, X. Zhang, H.-Y . Chan, and M. Zhao, “Incorpo- rating safety field theory into interactive trajectory prediction between vru and vehicle: An integrated spatial–temporal and risk-aware model,” Traffic Injury Prevention, vol. 26, no. 5, pp. 567–576, 2025
2025
-
[11]
Risk- aware vehicle trajectory prediction under safety-critical scenarios,
Q. Wang, D. Xu, G. Kuang, C. Lv, S. E. Li, and B. Nie, “Risk- aware vehicle trajectory prediction under safety-critical scenarios,”IEEE Transactions on Intelligent Transportation Systems, 2025
2025
-
[12]
Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network,
B. Kim, C. M. Kang, J. Kim, S. H. Lee, C. C. Chung, and J. W. Choi, “Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network,” in2017 IEEE 20Th international conference on intelligent transportation systems (ITSC). IEEE, 2017, pp. 399–404
2017
-
[13]
Vehicle trajectory prediction using lstms with spatial–temporal attention mechanisms,
L. Lin, W. Li, H. Bi, and L. Qin, “Vehicle trajectory prediction using lstms with spatial–temporal attention mechanisms,”IEEE Intelligent Transportation Systems Magazine, vol. 14, no. 2, pp. 197–208, 2021
2021
-
[14]
Bart ´e: Composite b ´ezier curves for racing trajectory estimation,
T. Weiss and M. Behl, “Bart ´e: Composite b ´ezier curves for racing trajectory estimation,”Journal of Intelligent & Robotic Systems, vol. 112, no. 2, p. 48, 2026
2026
-
[15]
Learning lane graph representations for motion forecasting,
M. Liang, B. Yang, R. Hu, Y . Chen, R. Liao, S. Feng, and R. Urtasun, “Learning lane graph representations for motion forecasting,” inEuro- pean Conference on Computer Vision. Springer, 2020, pp. 541–556
2020
-
[16]
Evolvegraph: Multi-agent trajectory prediction with dynamic relational reasoning,
J. Li, F. Yang, M. Tomizuka, and C. Choi, “Evolvegraph: Multi-agent trajectory prediction with dynamic relational reasoning,”Advances in neural information processing systems, vol. 33, pp. 19 783–19 794, 2020
2020
-
[17]
Ms-tip: imputation aware pedestrian trajectory prediction,
P. S. Chib, A. Nath, P. Kabra, I. Gupta, and P. Singh, “Ms-tip: imputation aware pedestrian trajectory prediction,” inInternational Conference on Machine Learning. PMLR, 2024, pp. 8389–8402
2024
-
[18]
Motion transformer with global intention localization and local movement refinement,
S. Shi, L. Jiang, D. Dai, and B. Schiele, “Motion transformer with global intention localization and local movement refinement,”Advances in Neural Information Processing Systems, vol. 35, pp. 6531–6543, 2022
2022
-
[19]
Fif: future interaction forecasted for multi-agent trajectory prediction,
Y . Cao, P. Li, X. Ling, and Q. Li, “Fif: future interaction forecasted for multi-agent trajectory prediction,”Transportation Research Part C: Emerging Technologies, vol. 177, p. 105190, 2025
2025
-
[20]
Social gan: Socially acceptable trajectories with generative adversarial networks,
A. Gupta, J. Johnson, L. Fei-Fei, S. Savarese, and A. Alahi, “Social gan: Socially acceptable trajectories with generative adversarial networks,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 2255–2264
2018
-
[21]
A novel generation-adversarial-network-based vehicle trajectory prediction method for intelligent vehicular networks,
L. Zhao, Y . Liu, A. Y . Al-Dubai, A. Y . Zomaya, G. Min, and A. Haw- bani, “A novel generation-adversarial-network-based vehicle trajectory prediction method for intelligent vehicular networks,”IEEE Internet of Things Journal, vol. 8, no. 3, pp. 2066–2077, 2020
2066
-
[22]
arXiv preprint arXiv:2403.11643 (2024)
T. Westny, B. Olofsson, and E. Frisk, “Diffusion-based environment- aware trajectory prediction,”arXiv preprint arXiv:2403.11643, 2024
-
[23]
Intp-dm: Intention- aware multimodal vehicle trajectory prediction using diffusion model,
Y . Yang, S. Jin, X. Na, P. Angeloudis, and S. Hu, “Intp-dm: Intention- aware multimodal vehicle trajectory prediction using diffusion model,” in2024 IEEE 27th International Conference on Intelligent Transporta- tion Systems (ITSC). IEEE, 2024, pp. 3725–3730
2024
-
[24]
Vehicle trajec- tory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for internet of vehicles,
X. Chen, H. Zhang, F. Zhao, Y . Cai, H. Wang, and Q. Ye, “Vehicle trajec- tory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for internet of vehicles,”IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–12, 2022
2022
-
[25]
Tnt: Target-driven trajectory prediction,
H. Zhao, J. Gao, T. Lan, C. Sun, B. Sapp, B. Varadarajan, Y . Shen, Y . Shen, Y . Chai, C. Schmidet al., “Tnt: Target-driven trajectory prediction,” inConference on Robot Learning. PMLR, 2021, pp. 895– 904
2021
-
[26]
Goal-guided and interaction- aware state refinement graph attention network for multi-agent trajectory prediction,
X. Chen, F. Luo, F. Zhao, and Q. Ye, “Goal-guided and interaction- aware state refinement graph attention network for multi-agent trajectory prediction,”IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 57–64, 2023
2023
-
[27]
Densetnt: End-to-end trajectory prediction from dense goal sets,
J. Gu, C. Sun, and H. Zhao, “Densetnt: End-to-end trajectory prediction from dense goal sets,” inProceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 15 303–15 312
2021
-
[28]
SceneFactory: GPU-Accelerated Multi-Agent Driving Simulation with Physics-Based Vehicle Dynamics
Y . Zhu, Y . Chen, T. Li, and Z. Bian, “Scenefactory: Gpu-accelerated multi-agent driving simulation with physics-based vehicle dynamics,” arXiv preprint arXiv:2605.08528, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[29]
Interactive trajectory prediction using a driving risk map-integrated deep learning method for surrounding vehicles on highways,
X. Liu, Y . Wang, K. Jiang, Z. Zhou, K. Nam, and C. Yin, “Interactive trajectory prediction using a driving risk map-integrated deep learning method for surrounding vehicles on highways,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 10, pp. 19 076–19 087, 2022
2022
-
[30]
Sa-tp 2: A safety-aware trajectory prediction and planning model for autonomous driving,
H. Liao, Z. Li, K. Zhu, K. Li, and C. Xu, “Sa-tp 2: A safety-aware trajectory prediction and planning model for autonomous driving,”IEEE Transactions on Robotics, 2025
2025
-
[31]
Heterogeneous trajectory forecasting via risk and scene graph learning,
J. Fang, C. Zhu, P. Zhang, H. Yu, and J. Xue, “Heterogeneous trajectory forecasting via risk and scene graph learning,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 11, pp. 12 078–12 091, 2023
2023
-
[32]
Risk-aware stochastic vehicle trajectory prediction with spatial-temporal interaction modelling,
Y . Feng, Q. Ye, E. Candela, J. Escribano-Macias, B. Hu, Y . Demiris, and P. Angeloudis, “Risk-aware stochastic vehicle trajectory prediction with spatial-temporal interaction modelling,”IEEE Open Journal of Intelligent Transportation Systems, 2025
2025
-
[33]
W. Wei and J. Wang, “Intention-based and risk-aware trajectory predic- tion for autonomous driving in complex traffic scenarios,”arXiv preprint arXiv:2409.15821, 2024
-
[34]
Ttc-slstm: Human trajectory prediction using time-to-collision interac- tion energy,
H.-T. Dang, R. Korbmacher, A. Tordeux, B. Gaudou, and N. Verstaevel, “Ttc-slstm: Human trajectory prediction using time-to-collision interac- tion energy,” in2023 15th International Conference on Knowledge and Systems Engineering (KSE). IEEE, 2023, pp. 1–6
2023
-
[35]
Strap: Spatial-temporal risk- attentive vehicle trajectory prediction for autonomous driving,
X. Ning, Z. Bian, D. Zuo, and S. Ergan, “Strap: Spatial-temporal risk- attentive vehicle trajectory prediction for autonomous driving,”arXiv preprint arXiv:2507.08563, 2025
-
[36]
Risk-aware trajectory prediction by incorporating spatio-temporal traffic interaction analysis,
D. Thuremella, L. Ince, and L. Kunze, “Risk-aware trajectory prediction by incorporating spatio-temporal traffic interaction analysis,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 14 421–14 427
2024
-
[37]
Composite safety potential field for highway driving risk assessment,
D. Zuo, Z. Bian, F. Zuo, and K. Ozbay, “Composite safety potential field for highway driving risk assessment,”arXiv preprint arXiv:2504.21158, 2025. NINGet al.: FROM CUES TO HORIZONS: DYNAMIC RISK HORIZON PROFILING FOR TRAJECTORY PREDICTION 10
-
[38]
Latent variable sequential set transformers for joint multi-agent motion prediction,
R. Girgis, F. Golemo, F. Codevilla, M. Weiss, J. A. D’Souza, S. E. Ka- hou, F. Heide, and C. Pal, “Latent variable sequential set transformers for joint multi-agent motion prediction,”arXiv preprint arXiv:2104.00563, 2021
-
[39]
The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems,
R. Krajewski, J. Bock, L. Kloeker, and L. Eckstein, “The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems,” in2018 21st international conference on intelligent transportation systems (ITSC). IEEE, 2018, pp. 2118–2125
2018
-
[40]
Bird’s eye view trajectory reconstruction of naturalistic crashes and near-crashes in the shrp2 nds,
Y . Jiao and S. Calvert, “Bird’s eye view trajectory reconstruction of naturalistic crashes and near-crashes in the shrp2 nds,” 2025
2025
-
[41]
Description of the shrp 2 naturalistic database and the crash, near-crash, and baseline data sets,
J. M. Hankey, M. A. Perez, and J. A. McClafferty, “Description of the shrp 2 naturalistic database and the crash, near-crash, and baseline data sets,” Virginia Tech Transportation Institute, Tech. Rep., 2016
2016
-
[42]
Social lstm: Human trajectory prediction in crowded spaces,
A. Alahi, K. Goel, V . Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese, “Social lstm: Human trajectory prediction in crowded spaces,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 961–971
2016
-
[43]
Convolutional social pooling for vehicle tra- jectory prediction,
N. Deo and M. M. Trivedi, “Convolutional social pooling for vehicle tra- jectory prediction,” inProceedings of the IEEE conference on computer vision and pattern recognition workshops, 2018, pp. 1468–1476
2018
-
[44]
Wsip: Wave superposition inspired pooling for dynamic interactions-aware trajectory prediction,
R. Wang, S. Wang, H. Yan, and X. Wang, “Wsip: Wave superposition inspired pooling for dynamic interactions-aware trajectory prediction,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 37, no. 4, 2023, pp. 4685–4692
2023
-
[45]
Goal-based neural physics vehicle trajectory prediction model,
R. Gan, H. Shi, P. Li, K. Wu, B. An, J. You, L. Li, J. Ma, C. Ma, and B. Ran, “Goal-based neural physics vehicle trajectory prediction model,”Transportation Research Part C: Emerging Technologies, vol. 179, p. 105283, 2025
2025
-
[46]
Pip: Planning-informed trajectory prediction for autonomous driving,
H. Song, W. Ding, Y . Chen, S. Shen, M. Y . Wang, and Q. Chen, “Pip: Planning-informed trajectory prediction for autonomous driving,” inEuropean conference on computer vision. Springer, 2020, pp. 598– 614
2020
-
[47]
Intention- aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles,
X. Chen, H. Zhang, F. Zhao, Y . Hu, C. Tan, and J. Yang, “Intention- aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles,”IEEE Transactions on Intel- ligent Transportation Systems, vol. 23, no. 10, pp. 19 471–19 483, 2022
2022
-
[48]
A cognitive-based trajectory prediction approach for autonomous driving,
H. Liao, Y . Li, Z. Li, C. Wang, Z. Cui, S. E. Li, and C. Xu, “A cognitive-based trajectory prediction approach for autonomous driving,” IEEE Transactions on Intelligent Vehicles, 2024. Xinyi Ningis a PhD candidate in Urban Systems at New York University Tandon School of Engineering, starting in the Fall of 2024. She earned her B.Sc. degree in Automation ...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.