Order Is Not Control
Pith reviewed 2026-06-27 07:13 UTC · model grok-4.3
The pith
Control requires a receiver-gated response law rather than order alone, as shown by consistent patterns across biological and LLM systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
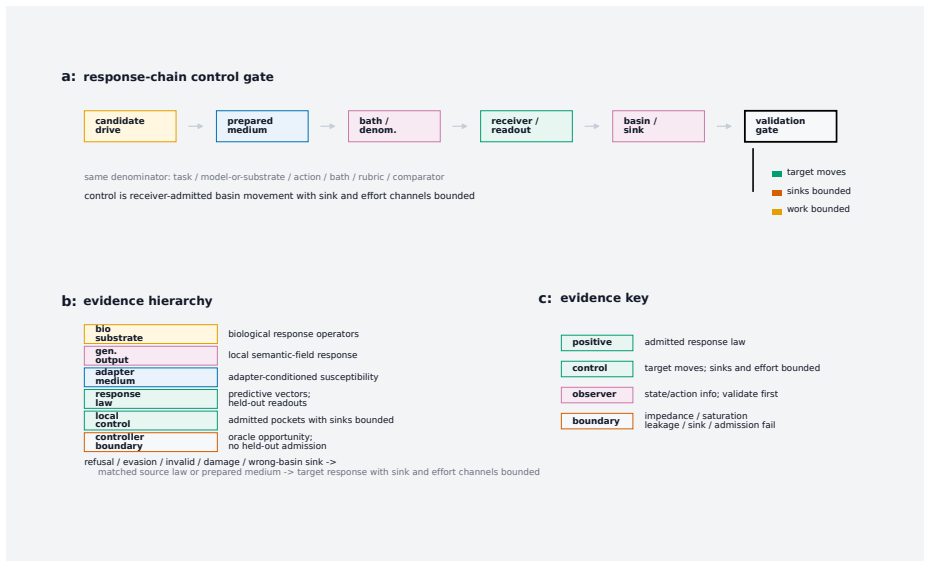
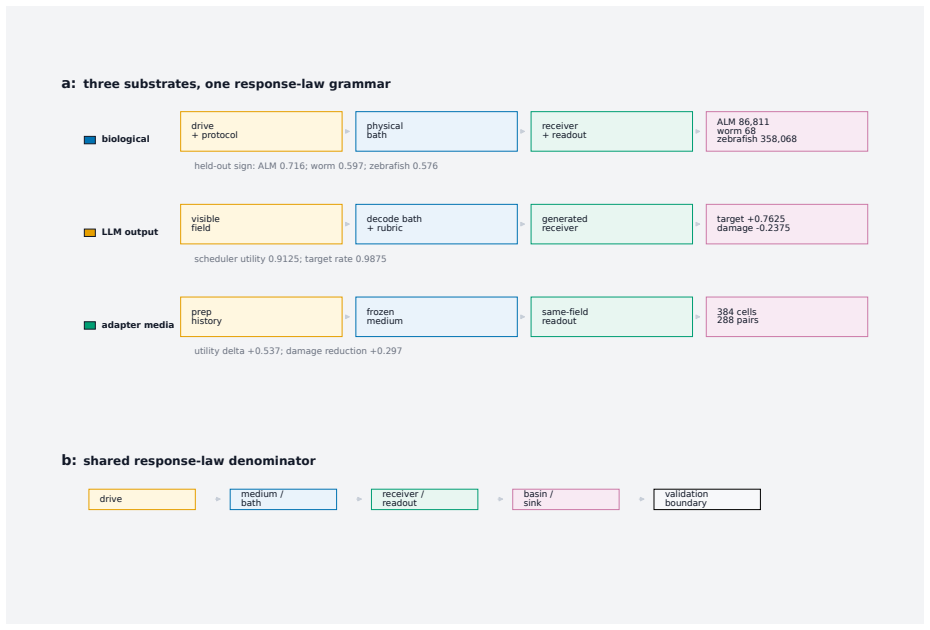
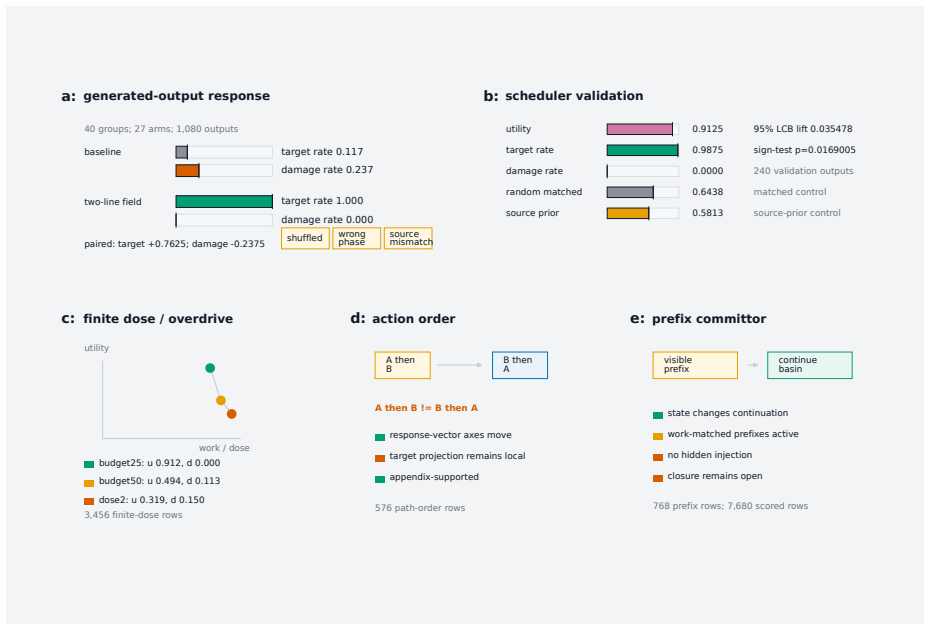
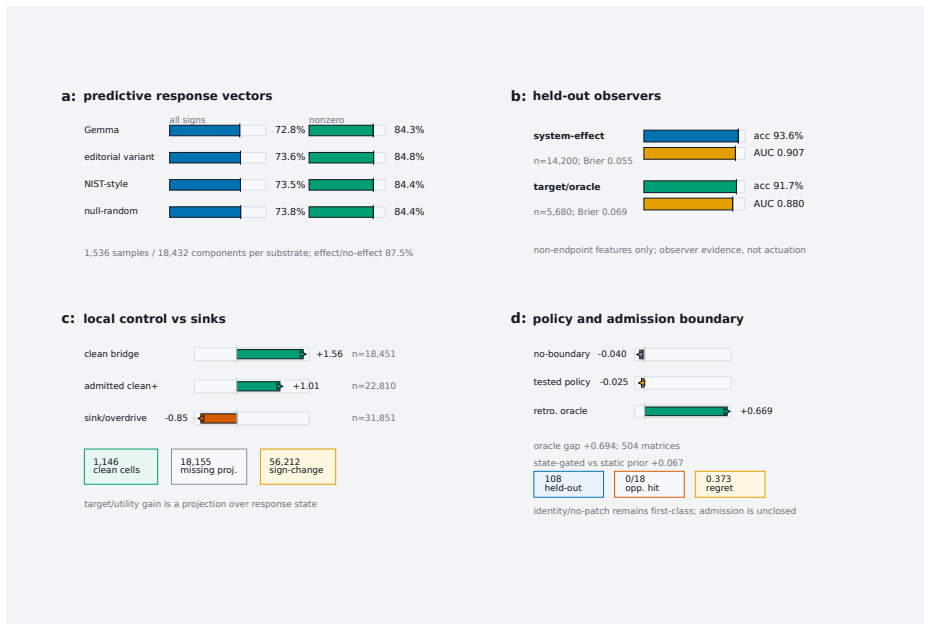
Order is not control. Control requires a receiver-gated response law: a denominator-indexed operator mapping material state, action/drive, bath, and receiver state to response displacement, sinks, effort, and basin projection. The law is identified across biological panels (mouse ALM, C. elegans, zebrafish) and LLM panels, where response vectors are predictable at 72.8-73.7 percent component-sign accuracy (rising to 84.3-84.8 percent on nonzero components) and held-out observers predict system-effect and target families at 93.6 percent and 91.7 percent accuracy. Interventions are admitted, saturated, sign-changing, leaky, or overdriven depending on medium, bath, receiver state, action port,
What carries the argument
The receiver-gated response law, a denominator-indexed operator that maps material state, action/drive, bath, and receiver state to response displacement, sinks, effort, and basin projection.
If this is right
- An intervention can be admitted, saturated, sign-changing, leaky, or overdriven depending on medium, bath, receiver state, action port, and comparator.
- Control is assigned when finite effort moves a target or outcome-readout class under the same denominator while damage, null/evasive, invalid format, overdrive, and unnecessary effort stay bounded.
- Constitution-conditioned adapters reshape susceptibility as prepared media.
- Stochastic-operator panels separate measured opportunity from deployable action policies.
- The evidence supports local admitted control and measurable stochastic response operators at the mesoscopic level.
Where Pith is reading between the lines
- The local character of the response law implies that alignment techniques may need to prepare specific receiver states rather than rely on global order.
- If the same denominator-indexed structure holds across domains, perturbation experiments could be designed to test transfer of control metrics from biological to artificial systems without assuming coordinate identity.
- The separation of opportunity from deployable policies in stochastic panels suggests a route to quantify when an LLM intervention remains within bounded effort.
- Future tests could check whether adapter conditioning consistently alters the sign and saturation behavior of generated responses under fixed drives.
Load-bearing premise
The biological panels and LLM panels demonstrate instances of the same receiver-gated response law.
What would settle it
If held-out observers in the LLM panels fail to predict system-effect and target/oracle families at the reported 93.6 percent and 91.7 percent accuracy, or if biological interventions do not exhibit the local admitted, saturated, or overdriven patterns under varied receiver states.
Figures

read the original abstract
AI alignment, interpretability, steering, and neural perturbation studies identify order-inducing objects. We argue that order is not control. Control requires a receiver-gated response law: a denominator-indexed operator mapping material state, action/drive, bath, and receiver state to response displacement, sinks, effort, and basin projection. We identify it across biological, LLM, adapter, and stochastic-operator panels. The laws are local: an intervention can be admitted, saturated, sign-changing, leaky, or overdriven depending on medium, bath, receiver state, action port, and comparator. Control is assigned when finite effort moves a target or outcome-readout class under the same denominator while damage, null/evasive, invalid format, overdrive, and unnecessary effort stay bounded. Mouse ALM, C. elegans, and zebrafish panels provide physical response-operator evidence while excluding coordinate identity and controller conclusions. LLM panels show generated-output response laws: across four material conditions, response vectors are predictable at 72.8-73.7% component-sign accuracy, rising to 84.3-84.8% on nonzero components; held-out observers predict system-effect and target/oracle families at 93.6% and 91.7% accuracy. Constitution-conditioned adapters reshape susceptibility as prepared media, and stochastic-operator panels separate measured opportunity from deployable action policies. This gives a driven-dissipative response-system account at the mesoscopic control level: drives act through prepared media, baths, and receivers, producing admitted movement, impedance, sinks, or overdrive. The evidence supports local admitted control and measurable stochastic response operators, while leaving deployable pre-generation control, hidden/logit causal sufficiency, biological-to-LLM coordinate identity, and literal thermodynamic quantities outside scope.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript argues that order is not control. Control is defined as requiring a receiver-gated response law: a denominator-indexed operator mapping material state, action/drive, bath, and receiver state to response displacement, sinks, effort, and basin projection. The paper claims to identify this law in biological panels (mouse ALM, C. elegans, zebrafish) providing physical response-operator evidence and in LLM panels, reporting 72.8-73.7% component-sign accuracy (84.3-84.8% on nonzero components) across four material conditions, plus held-out prediction accuracies of 93.6% for system-effect and 91.7% for target/oracle families. It concludes that the laws are local (admitted, saturated, sign-changing, leaky, or overdriven depending on conditions), control is assigned when finite effort moves a target under the same denominator with bounded damage/null/overdrive, and this yields a driven-dissipative mesoscopic account while excluding coordinate identity, controller conclusions, and pre-generation control.
Significance. If the central claim holds, the work supplies a quantifiable, domain-spanning distinction between order-inducing objects and control at the mesoscopic level, with direct relevance to AI alignment, interpretability, and neural perturbation studies. The LLM panel accuracies constitute concrete, falsifiable measurements of response predictability under material conditions, and the exclusion of certain inferences (e.g., coordinate identity) is explicitly scoped. The approach of treating adapters as prepared media and separating opportunity from policy is a constructive modeling choice.
major comments (2)
- [Abstract] Abstract: The inference that the identical denominator-indexed operator operates across biological and LLM panels is not supported by an explicit common operator expression, reduction, or equivalence proof showing that the functional form, indexing, saturation/leakage rules, and basin-projection mapping match between the physical response operators and the LLM-generated output laws. The reported component-sign and held-out accuracies establish only statistical predictability of outputs under four material conditions; they do not demonstrate structural identity of the operator.
- [Abstract] Abstract: The definition of control as necessarily requiring the receiver-gated response law is introduced axiomatically. No independent criterion or comparison to standard control-theoretic notions (e.g., feedback, observability, or dissipativity) is supplied to establish that this specific mapping is required for control rather than being a sufficient but non-necessary characterization; this renders the claim that order-inducing objects are not control dependent on acceptance of the new definition.
minor comments (2)
- The abstract refers to 'four material conditions' without enumerating them; an explicit list or table would improve reproducibility and allow readers to assess whether the conditions are commensurate across biological and LLM panels.
- The manuscript would benefit from a consolidated table reporting accuracies, component counts, and held-out metrics side-by-side for all panels (biological, LLM, adapter, stochastic-operator) to facilitate direct comparison.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We respond point by point to the major comments and indicate where revisions will be made.
read point-by-point responses
-
Referee: [Abstract] Abstract: The inference that the identical denominator-indexed operator operates across biological and LLM panels is not supported by an explicit common operator expression, reduction, or equivalence proof showing that the functional form, indexing, saturation/leakage rules, and basin-projection mapping match between the physical response operators and the LLM-generated output laws. The reported component-sign and held-out accuracies establish only statistical predictability of outputs under four material conditions; they do not demonstrate structural identity of the operator.
Authors: We agree that the manuscript does not supply an explicit common operator expression or formal equivalence proof establishing structural identity between the biological and LLM instantiations. The identification rests on the shared functional form of the denominator-indexed mapping together with the empirical observation that this form produces statistically predictable response components under four matched material conditions. The reported accuracies therefore demonstrate consistent applicability of the operator structure rather than a reduction or identity proof. We will revise the abstract and the relevant results sections to replace the phrasing of an 'identical' operator with language that the same functional form is identified and shown to be predictive across domains. revision: partial
-
Referee: [Abstract] Abstract: The definition of control as necessarily requiring the receiver-gated response law is introduced axiomatically. No independent criterion or comparison to standard control-theoretic notions (e.g., feedback, observability, or dissipativity) is supplied to establish that this specific mapping is required for control rather than being a sufficient but non-necessary characterization; this renders the claim that order-inducing objects are not control dependent on acceptance of the new definition.
Authors: The definition is introduced as the minimal mapping required to support a driven-dissipative, receiver-gated account at the mesoscopic level that distinguishes control from order. It is not asserted to be the unique possible definition of control in all contexts. We will add a short paragraph in the introduction that situates the proposed mapping relative to classical notions of feedback, observability, and dissipativity, making explicit that the definition is offered as a sufficient characterization for the scope of the present work rather than a necessary condition in the classical sense. revision: yes
Circularity Check
Control defined via receiver-gated operator whose presence is then reported as identified in panels
specific steps
-
self definitional
[Abstract]
"Control requires a receiver-gated response law: a denominator-indexed operator mapping material state, action/drive, bath, and receiver state to response displacement, sinks, effort, and basin projection. We identify it across biological, LLM, adapter, and stochastic-operator panels."
The paper defines control as the presence of this exact operator, then claims to identify the operator in the panels on the basis of component-sign accuracies (72.8-73.7 % overall) and held-out prediction accuracies. Because the operator is introduced as definitional, the reported identification is consistent with the definition by construction and does not constitute an independent test of the claimed functional form across domains.
full rationale
The paper's central derivation begins by stipulating that control requires a specific denominator-indexed operator, then states that this operator is identified in the biological and LLM panels via predictability metrics. The metrics establish statistical association under four conditions but do not independently verify the operator's functional form, indexing, or saturation rules; the identification therefore reduces to consistency with the introduced definition rather than an external criterion. No self-citations or prior uniqueness theorems are invoked in the provided text, so the circularity is confined to the self-definitional step.
Axiom & Free-Parameter Ledger
axioms (1)
- ad hoc to paper Control is defined as requiring a receiver-gated response law with the specified mapping from states to responses.
invented entities (2)
-
denominator-indexed operator
no independent evidence
-
receiver-gated response law
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Abc align: Large language model alignment for safety & accuracy, 2024
Gareth Seneque, Lap-Hang Ho, Ariel Kuperman, Nafise Erfanian Saeedi, and Jeffrey Molendijk. Abc align: Large language model alignment for safety & accuracy, 2024. URL https://arxiv.or g/abs/2408.00307
arXiv 2024
-
[2]
Enigma: The geometry of reasoning and alignment in large-language models,
Gareth Seneque, Lap-Hang Ho, Nafise Erfanian Saeedi, Jeffrey Molendijk, Ariel Kupermann, and Tim Elson. Enigma: The geometry of reasoning and alignment in large-language models,
-
[3]
URL https://arxiv.org/abs/2510.11278
-
[4]
Gareth Seneque, Lap-Hang Ho, Nafise Erfanian Saeedi, Jeffrey Molendijk, and Tim Elson. Atlas: Constitution-conditioned latent geometry and redistribution across language models and neural perturbation data, 2026. URL https://arxiv.org/abs/2604.17663
Pith/arXiv arXiv 2026
-
[5]
Constitutional ai: Harmlessness from ai feedback, 2022
Yuntao Bai et al. Constitutional ai: Harmlessness from ai feedback, 2022. URL https: //arxiv.org/abs/2212.08073
Pith/arXiv arXiv 2022
-
[6]
Collective constitutional ai: Aligning a language model with public input
Saffron Huang et al. Collective constitutional ai: Aligning a language model with public input. InProceedings of the 2024 ACM Conference on Fairness, Accountability, and Transparency,
2024
-
[7]
Liao, Esin Durmus, Alex Tamkin, and Deep Ganguli
doi: 10.1145/3630106.3658979. URL https://arxiv.org/abs/2406.07814
-
[8]
Jan-Philipp Franken et al. Self-supervised alignment with mutual information: Learning to follow principles without preference labels, 2024. URL https://arxiv.org/abs/2404.14313
arXiv 2024
-
[9]
Let’s verify step by step, 2023
Hunter Lightman et al. Let’s verify step by step, 2023. URL https://arxiv.org/abs/2305.20050
Pith/arXiv arXiv 2023
-
[10]
Math-Shepherd: Verify and Reinforce
Peiyi Wang, Lei Li, Zhihong Shao, Runxin Xu, Damai Dai, Yifei Li, Deli Chen, Yu Wu, and Zhifang Sui. Math-shepherd: Verify and reinforce llms step-by-step without human annotations. InProceedings of the 62nd Annual Meeting of the Association for Computational Linguistics, pages 9426–9439, 2024. doi: 10.18653/v1/2024.acl-long.510. URL https: //aclanthology...
-
[11]
Alignment faking in large language models, 2024
Ryan Greenblatt et al. Alignment faking in large language models, 2024. URL https://arxiv.or g/abs/2412.14093
Pith/arXiv arXiv 2024
-
[12]
Why do some language models fake alignment while others don’t?, 2025
Abhay Sheshadri et al. Why do some language models fake alignment while others don’t?, 2025. URL https://arxiv.org/abs/2506.18032
arXiv 2025
-
[13]
A mathematical framework for transformer circuits, 2021
Nelson Elhage et al. A mathematical framework for transformer circuits, 2021. URL https: //transformer-circuits.pub/2021/framework/index.html
2021
-
[14]
Circuit tracing: Revealing computational graphs in language models, 2025
Anthropic. Circuit tracing: Revealing computational graphs in language models, 2025. URL https://transformer-circuits.pub/2025/attribution-graphs/methods.html
2025
-
[15]
Representation engineering: A top-down approach to ai transparency, 2023
Andy Zou et al. Representation engineering: A top-down approach to ai transparency, 2023. URL https://arxiv.org/abs/2310.01405
Pith/arXiv arXiv 2023
-
[16]
Activation addition: Steering language models without optimiza- tion, 2023
Alexander Matt Turner et al. Activation addition: Steering language models without optimiza- tion, 2023. URL https://arxiv.org/abs/2308.10248
Pith/arXiv arXiv 2023
-
[17]
Nina Rimsky, Nick Gabrieli, Julian Schulz, Meg Tong, Evan Hubinger, and Alexander Turner. Steering Llama 2 via contrastive activation addition. InProceedings of the 62nd Annual Meeting of the Association for Computational Linguistics, pages 15504–15522, 2024. doi: 10.18653/v1/2024.acl-long.828. URL https://aclanthology.org/2024.acl-long.828/. 22
-
[18]
Refusal in language models is mediated by a single direction, 2024
Andy Arditi et al. Refusal in language models is mediated by a single direction, 2024. URL https://arxiv.org/abs/2406.11717
Pith/arXiv arXiv 2024
- [19]
-
[20]
Steering off course: Reliability challenges in steering language models,
Patricia Da Silva et al. Steering off course: Reliability challenges in steering language models,
-
[21]
URL https://arxiv.org/abs/2504.04635
-
[22]
Position: The platonic representation hypothesis
Minyoung Huh, Brian Cheung, Tongzhou Wang, and Phillip Isola. Position: The platonic representation hypothesis. InProceedings of the 41st International Conference on Machine Learning, 2024. URL https://proceedings.mlr.press/v235/huh24a.html
2024
-
[23]
Rishi Jha, Collin Zhang, Vitaly Shmatikov, and John X. Morris. Harnessing the universal geometry of embeddings, 2025. URL https://arxiv.org/abs/2505.12540
arXiv 2025
-
[24]
Revisiting the platonic representation hypothesis: An aristotelian view, 2026
Fabian Groeger, Shuo Wen, and Maria Brbic. Revisiting the platonic representation hypothesis: An aristotelian view, 2026. URL https://arxiv.org/abs/2602.14486
Pith/arXiv arXiv 2026
-
[25]
Joel Bauer et al. Sensory experience steers representational drift in mouse visual cortex.Nature Communications, 15, 2024. doi: 10.1038/s41467-024-53326-x. URL https://doi.org/10.1038/s4 1467-024-53326-x
-
[26]
Climer, Heydar Davoudi, Jun Young Oh, and Daniel A
Jason R. Climer, Heydar Davoudi, Jun Young Oh, and Daniel A. Dombeck. Hippocampal representations drift in stable multisensory environments.Nature, 645:457–465, 2025. doi: 10.1038/s41586-025-09245-y. URL https://doi.org/10.1038/s41586-025-09245-y
-
[27]
A brain-wide map of neural activity during complex behaviour , url =
The International Brain Laboratory. A brain-wide map of neural activity during complex behaviour.Nature, 645:177–191, 2025. doi: 10.1038/s41586-025-09235-0. URL https: //doi.org/10.1038/s41586-025-09235-0
-
[28]
Brain-wide representations of prior information in mouse decision-making
Charles Findling et al. Brain-wide representations of prior information in mouse decision-making. Nature, 2025. doi: 10.1038/s41586-025-09226-1. URL https://doi.org/10.1038/s41586-025- 09226-1
-
[29]
Gabriel Peyre and Marco Cuturi. Computational optimal transport: With applications to data science.Foundations and Trends in Machine Learning, 11(5-6):355–607, 2019. doi: 10.1561/2200000073. URL https://doi.org/10.1561/2200000073
-
[30]
Lenaic Chizat, Gabriel Peyre, Bernhard Schmitzer, and Francois-Xavier Vialard. Unbalanced optimal transport: Dynamic and kantorovich formulations.Journal of Functional Analysis, 274 (11):3090–3123, 2018. doi: 10.1016/j.jfa.2018.03.008. URL https://doi.org/10.1016/j.jfa.2018.0 3.008
-
[31]
Learning stochastic dynamics from snapshots through regularized unbalanced optimal transport, 2025
Zhenyi Zhang, Tiejun Li, and Peijie Zhou. Learning stochastic dynamics from snapshots through regularized unbalanced optimal transport, 2025. URL https://arxiv.org/abs/2410.00844
arXiv 2025
-
[32]
Phase-field Approaches to Structural Topology Optimization
Shun-ichi Amari.Information Geometry and Its Applications. Springer, 2016. doi: 10.1007/978- 4-431-55978-8. URL https://doi.org/10.1007/978-4-431-55978-8
-
[33]
R. E. Kalman. On the general theory of control systems. InProceedings of the First International Congress on Automatic Control, 1960. doi: 10.1016/S1474-6670(17)70094-8. URL https: //doi.org/10.1016/S1474-6670(17)70094-8. 23
-
[34]
Jan C. Willems. Dissipative dynamical systems part i: General theory.Archive for Rational Mechanics and Analysis, 45:321–351, 1972. doi: 10.1007/BF01665402. URL https://doi.org/10 .1007/BF01665402
-
[35]
Time, structure, and fluctuations.Science, 201(4358):777–785, 1978
Ilya Prigogine. Time, structure, and fluctuations.Science, 201(4358):777–785, 1978. doi: 10.1126/science.201.4358.777. URL https://doi.org/10.1126/science.201.4358.777
-
[36]
Data-driven optimal control of unknown nonlinear dynamical systems using the koopman operator
Zhexuan Zeng, Ruikun Zhou, Yiming Meng, and Jun Liu. Data-driven optimal control of unknown nonlinear dynamical systems using the koopman operator. InProceedings of the 7th Annual Learning for Dynamics & Control Conference, pages 1127–1139, 2025. URL https://proceedings.mlr.press/v283/zeng25a.html
2025
-
[37]
Weinan E and Eric Vanden-Eijnden. Transition-path theory and path-finding algorithms for the study of rare events.Annual Review of Physical Chemistry, 61:391–420, 2010. doi: 10.1146/annurev.physchem.040808.090412. URL https://doi.org/10.1146/annurev.physchem.0 40808.090412
-
[38]
Toolformer: Language models can teach themselves to use tools
Timo Schick, Jane Dwivedi-Yu, Roberto Dessì, Roberta Raileanu, Maria Lomeli, Eric Hambro, Luke Zettlemoyer, Nicola Cancedda, and Thomas Scialom. Toolformer: Language models can teach themselves to use tools. InAdvances in Neural Information Processing Systems, 2023. URL https://arxiv.org/abs/2302.04761
Pith/arXiv arXiv 2023
-
[39]
Agent security bench (ASB): Formalizing and benchmarking attacks and defenses in LLM-based agents
Hanrong Zhang, Jingyuan Huang, Kai Mei, Yifei Yao, Zhenting Wang, Chenlu Zhan, Hongwei Wang, and Yongfeng Zhang. Agent security bench (ASB): Formalizing and benchmarking attacks and defenses in LLM-based agents. InInternational Conference on Learning Representations,
-
[40]
URL https://arxiv.org/abs/2410.02644
-
[41]
Wiley-Interscience, New York, 1977
Gregoire Nicolis and Ilya Prigogine.Self-Organization in Nonequilibrium Systems: From Dissipative Structures to Order Through Fluctuations. Wiley-Interscience, New York, 1977. ISBN 0471024015
1977
-
[42]
M. C. Cross and P. C. Hohenberg. Pattern formation outside of equilibrium.Reviews of Modern Physics, 65(3):851–1112, 1993. doi: 10.1103/RevModPhys.65.851. URL https: //doi.org/10.1103/RevModPhys.65.851
-
[43]
Reports on Progress in Physics75(12), 126001 (2012) https://doi.org/ 10.1088/0034-4885/75/12/126001
Udo Seifert. Stochastic thermodynamics, fluctuation theorems and molecular machines.Reports on Progress in Physics, 75(12):126001, 2012. doi: 10.1088/0034-4885/75/12/126001. URL https://doi.org/10.1088/0034-4885/75/12/126001
-
[44]
Statistical-mechanical theory of irreversible processes
Ryogo Kubo. Statistical-mechanical theory of irreversible processes. i. general theory and simple applications to magnetic and conduction problems.Journal of the Physical Society of Japan, 12(6):570–586, 1957. doi: 10.1143/JPSJ.12.570. URL https://doi.org/10.1143/JPSJ.12.570
-
[45]
Hermann Haken.Synergetics: An Introduction. Springer, 3 edition, 1983. doi: 10.1007/978-3- 642-88338-5. URL https://doi.org/10.1007/978-3-642-88338-5
-
[46]
R. E. Kalman. A new approach to linear filtering and prediction problems.Journal of Basic Engineering, 82(1):35–45, 1960. doi: 10.1115/1.3662552. URL https://doi.org/10.1115/1.3662 552
-
[47]
Karl J. Åström and Richard M. Murray.Feedback Systems: An Introduction for Scientists and Engineers. Princeton University Press, 2 edition, 2021. ISBN 9780691193984. URL https://press.princeton.edu/books/hardcover/9780691193984/feedback-systems. 24
arXiv 2021
-
[48]
Mikail Khona and Ila R. Fiete. Attractor and integrator networks in the brain.Nature Reviews Neuroscience, 23(12):744–766, 2022. doi: 10.1038/s41583-022-00642-0. URL https://doi.org/10.1038/s41583-022-00642-0
-
[49]
Perich, Divya Narain, and Juan A
Matthew G. Perich, Divya Narain, and Juan A. Gallego. A neural manifold view of the brain.Nature Neuroscience, 28:1582–1597, 2025. doi: 10.1038/s41593-025-02031-z. URL https://doi.org/10.1038/s41593-025-02031-z
-
[50]
Mark M. Churchland, John P. Cunningham, Matthew T. Kaufman, Justin D. Foster, Paul Nuyujukian, Stephen I. Ryu, and Krishna V. Shenoy. Neural population dynamics during reaching.Nature, 487(7405):51–56, 2012. doi: 10.1038/nature11129. URL https://doi.org/10.1 038/nature11129
-
[51]
Towards best practices of activation patching in language models: Metrics and methods
Fred Zhang and Neel Nanda. Towards best practices of activation patching in language models: Metrics and methods. InInternational Conference on Learning Representations, 2024. URL https://arxiv.org/abs/2309.16042
Pith/arXiv arXiv 2024
-
[52]
Reciprocal relations in irreversible processes
Lars Onsager. Reciprocal relations in irreversible processes. i.Physical Review, 37(4):405–426,
-
[53]
URL https://doi.org/10.1103/PhysRev.37.405
doi: 10.1103/PhysRev.37.405. URL https://doi.org/10.1103/PhysRev.37.405
-
[54]
Alex J. Yuffa and John A. Scales. Linear response laws and causality in electrodynamics. European Journal of Physics, 33(6):1635–1650, 2012. doi: 10.1088/0143-0807/33/6/1635. URL https://doi.org/10.1088/0143-0807/33/6/1635
-
[55]
A review of linear response theory for general differentiable dynamical systems
David Ruelle. A review of linear response theory for general differentiable dynamical systems. Nonlinearity, 22(4):855–870, 2009. doi: 10.1088/0951-7715/22/4/009. URL https://doi.org/10 .1088/0951-7715/22/4/009
-
[56]
Bernard D. Coleman and Walter Noll. Foundations of linear viscoelasticity.Reviews of Modern Physics, 33(2):239–249, 1961. doi: 10.1103/RevModPhys.33.239. URL https: //doi.org/10.1103/RevModPhys.33.239
-
[57]
Gemma 3 technical report, 2025
Gemma Team. Gemma 3 technical report, 2025. URL https://arxiv.org/abs/2503.19786
Pith/arXiv arXiv 2025
-
[58]
Marah Abdin et al. Phi-4-mini technical report: Compact yet powerful multimodal language models via mixture-of-loras, 2025. URL https://arxiv.org/abs/2503.01743
Pith/arXiv arXiv 2025
-
[59]
The llama 3 herd of models, 2024
Aaron Grattafiori et al. The llama 3 herd of models, 2024. URL https://arxiv.org/abs/2407.2 1783
2024
-
[60]
An Yang et al. Qwen3 technical report, 2025. URL https://arxiv.org/abs/2505.09388
Pith/arXiv arXiv 2025
-
[61]
Artificial intelligence risk management framework (AI RMF 1.0)
National Institute of Standards and Technology. Artificial intelligence risk management framework (AI RMF 1.0). NIST AI 100-1, National Institute of Standards and Technology,
-
[62]
URL https://doi.org/10.6028/NIST.AI.100-1
-
[63]
Robust neuronal dynamics in premotor cortex during motor planning.Nature, 532:459–464, 2016
Nuo Li, Kayvon Daie, Karel Svoboda, and Shaul Druckmann. Robust neuronal dynamics in premotor cortex during motor planning.Nature, 532:459–464, 2016. doi: 10.1038/nature17643. URL https://doi.org/10.1038/nature17643
-
[64]
Discrete attractor dynamics underlies persistent activity in the frontal cortex, 2019
Karel Svoboda and Hidehiko Inagaki. Discrete attractor dynamics underlies persistent activity in the frontal cortex, 2019. URL https://janelia.figshare.com/articles/dataset/Discrete_attr actor_dynamics_underlies_persistent_activity_in_the_frontal_cortex/7489253. Janelia Research Campus dataset. 25
arXiv 2019
-
[65]
Dataset (matlab format) from chen kang et al
Nuo Li and Guang Chen. Dataset (matlab format) from chen kang et al. (2021) modularity and robustness of frontal cortex networks, 2022. URL https://doi.org/10.5281/zenodo.6713616. Zenodo dataset
-
[66]
Dataset (matlab format) from yang et al
Nuo Li and Weiguo Yang. Dataset (matlab format) from yang et al. (2022) thalamus-driven functional populations in frontal cortex support decision-making, 2022. URL https://doi.org/ 10.5281/zenodo.6846161. Zenodo dataset
-
[67]
pyramidal cell types drive functionally distinct cortical activity patterns during decision-making
Anne Churchland, Xiaonan Sun, and Simon Musall. Data supporting “pyramidal cell types drive functionally distinct cortical activity patterns during decision-making”, 2023. URL https://plus.figshare.com/articles/dataset/Data_supporting_Pyramidal_cell_types_driv e_functionally_distinct_cortical_activity_patterns_during_decision-making_/21538458. Figshare+ dataset
2023
-
[68]
Standardized and reproducible measurement of decision- making in mice.eLife, 10:e63711, 2021
The International Brain Laboratory. Standardized and reproducible measurement of decision- making in mice.eLife, 10:e63711, 2021. doi: 10.7554/elife.63711. URL https://elifesciences.or g/articles/63711
-
[69]
Reproducibility of in vivo electrophysiological mea- surements in mice.eLife, 13:RP100840, 2025
The International Brain Laboratory. Reproducibility of in vivo electrophysiological mea- surements in mice.eLife, 13:RP100840, 2025. doi: 10.7554/elife.100840.3. URL https://elifesciences.org/articles/100840
-
[70]
Francesco Randi, Anuj Sharma, Sophie Dvali, and Andrew M. Leifer. Neural signal propagation atlas of caenorhabditis elegans, 2024. URL https://dandiarchive.org/dandiset/001075/0.24093 0.1859. DANDI archive dataset
2024
-
[71]
Thermoregulatory responses forebrain, 2023
Martin Haesemeyer and Kaarthik Balakrishnan. Thermoregulatory responses forebrain, 2023. URL https://dandiarchive.org/dandiset/000235/0.230316.1600. DANDI archive dataset
arXiv 2023
-
[72]
Thermoregulatory responses midbrain, 2023
Martin Haesemeyer and Kaarthik Balakrishnan. Thermoregulatory responses midbrain, 2023. URL https://dandiarchive.org/dandiset/000236/0.230316.2031. DANDI archive dataset
arXiv 2023
-
[73]
Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, and Weizhu Chen
Edward J. Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, and Weizhu Chen. LoRA: Low-rank adaptation of large language models, 2021. URL https://arxiv.org/abs/2106.09685
Pith/arXiv arXiv 2021
-
[74]
Measuring AI R&D automation, 2026
Alan Chan, Ranay Padarath, Joe Kwon, Hilary Greaves, and Markus Anderljung. Measuring AI R&D automation, 2026. URL https://arxiv.org/abs/2603.03992
arXiv 2026
-
[75]
Inspectable AI for science: A research object approach to generative AI governance,
Ruta Binkyte, Sharif Abuaddba, Chamikara Mahawaga, Ming Ding, Natasha Fernandes, and Mario Fritz. Inspectable AI for science: A research object approach to generative AI governance,
-
[76]
URL https://arxiv.org/abs/2604.11261
-
[77]
Zhehao Zhang, Weijie Xu, Fanyou Wu, and Chandan K. Reddy. Falsereject: A resource for improving contextual safety and mitigating over-refusals in LLMs via structured reasoning,
-
[78]
URL https://arxiv.org/abs/2505.08054
-
[79]
DeceptionBench: A comprehensive benchmark for AI deception behaviors in real-world scenarios,
Yao Huang, Yitong Sun, Yichi Zhang, Ruochen Zhang, Yinpeng Dong, and Xingxing Wei. DeceptionBench: A comprehensive benchmark for AI deception behaviors in real-world scenarios,
-
[80]
URL https://arxiv.org/abs/2510.15501
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.