Quantum optimal control of steady orbits
Pith reviewed 2026-06-27 04:07 UTC · model grok-4.3
The pith
A finite-time scheme optimizes control sequences to steer dissipative quantum systems into user-specified steady orbits.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The formalism finds control sequences that drive a dissipative quantum system towards a steady orbit passing through user-specified waypoints. It differs from Floquet-Lindblad state engineering and effective Hamiltonian theories by targeting the stroboscopic steady state reached after infinite repetition of a finite control sequence, using a numerical scheme whose complexity scales like standard gradient ascent pulse engineering.
What carries the argument
Finite-time numerical scheme that captures the asymptotic approach to the steady orbit under repeated application of the control sequence.
If this is right
- Control design becomes feasible for cooling engines and coherent oscillators that rely on steady orbits.
- User-specified waypoints can be placed directly on the target orbit without solving infinite-time dynamics.
- The same scaling as GRAPE makes the method practical for systems used in precision metrology and magnetic resonance.
- The approach handles stroboscopic steady states and limit cycles reached asymptotically.
Where Pith is reading between the lines
- The waypoint specification could extend to designing control for non-periodic dissipative attractors.
- Numerical validation on small spin systems would directly test whether the finite-time approximation holds for realistic decoherence rates.
- The method might reduce the number of experimental iterations needed to stabilize steady-state free precession sequences.
Load-bearing premise
A finite-time numerical scheme can accurately capture the asymptotic approach to the steady orbit when the control sequence is repeated infinitely many times.
What would settle it
Apply the optimized finite control sequence repeatedly to the dissipative system in simulation or experiment and check whether the state fails to converge to the orbit through the specified waypoints.
Figures

read the original abstract
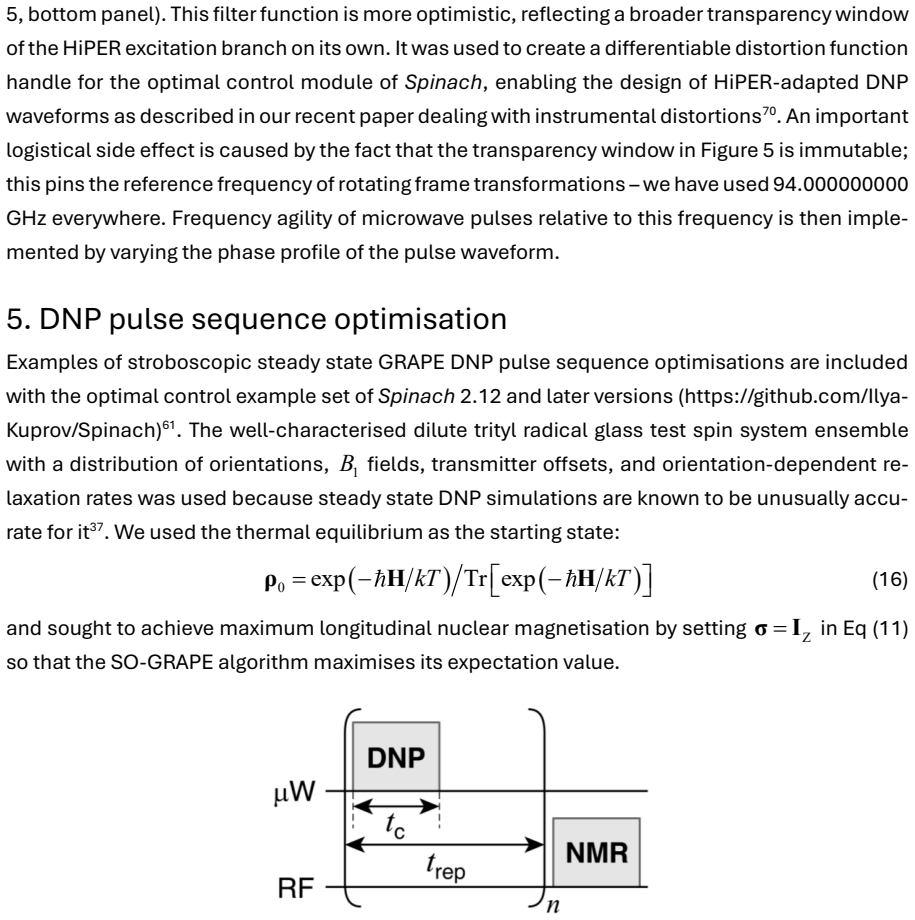
Periodically driven dissipative systems can settle into steady orbits - fixed loops on their dynamical manifolds. In quantum mechanics, steady orbits occur in cooling engines (used to initialise quantum devices), coherent oscillators (such as lasers and masers), precision metrology devices (atomic clocks, optical and spin magnetometers), and magnetic resonance (steady state free precession, dynamic nuclear polarisation). Steady orbits and stroboscopic steady states are a promising target for quantum optimal control, but the numerical complexity is prohibitive: the infinite loop defeats gradient ascent pulse engineering (GRAPE) which relies on explicit numerical propagation in the time domain. Here we propose an efficient quantum control strategy for stroboscopic steady states and limit cycles that are approached asymptotically when a control sequence is repeated infinitely many times. The formalism is different from Floquet-Lindblad state engineering and effective Hamiltonian theories: it finds control sequences that drive a dissipative quantum system towards a steady orbit passing through user-specified waypoints. The software implementation (same numerical complexity scaling as GRAPE) is done for the Spinach library.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a quantum optimal control formalism for stroboscopic steady states and limit cycles in periodically driven dissipative systems. It finds control sequences that drive the system asymptotically toward a steady orbit passing through user-specified waypoints when the sequence is repeated infinitely often, with numerical complexity scaling identically to GRAPE and implemented in the Spinach library; the approach is distinguished from Floquet-Lindblad state engineering and effective Hamiltonian methods.
Significance. If the finite-time scheme reliably encodes the infinite-repetition limit-cycle condition, the method would enable practical optimal control for applications including cooling engines, lasers/masers, atomic clocks, optical and spin magnetometers, and steady-state free precession in magnetic resonance, where infinite-time periodic driving has previously rendered standard GRAPE intractable.
major comments (2)
- [formalism / optimization procedure] The central claim requires that a finite-horizon optimization (with the same scaling as GRAPE) produces controls whose periodic repetition drives the dissipative system exactly to the user-specified waypoint on the steady orbit. The manuscript must demonstrate, via explicit analysis or theorem in the formalism section, that the finite-time propagator and its gradient accurately encode the infinite-time limit-cycle fixed-point condition without requiring long-time propagation or fixed-point solving; the skeptic concern that small finite-window errors can accumulate for slow transients or marginally attractive orbits is load-bearing and currently unaddressed.
- [results / numerical examples] Numerical validation is required to confirm that controls optimized over a finite window actually converge to the waypoint under indefinite repetition. The paper should add at least one explicit example (e.g., a cooling engine or steady-state free precession case) showing the long-time trajectory after many periods, with quantitative distance to the target waypoint.
minor comments (2)
- [introduction] Clarify the precise sense in which the method differs from Floquet-Lindblad engineering by adding a short comparative paragraph or table of assumptions.
- [implementation] The abstract states the software implementation has 'the same numerical complexity scaling as GRAPE'; this should be quantified (e.g., big-O scaling with Hilbert-space dimension and number of time steps) in the methods section.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The two major comments identify important points that require clarification and additional material. We address each below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [formalism / optimization procedure] The central claim requires that a finite-horizon optimization (with the same scaling as GRAPE) produces controls whose periodic repetition drives the dissipative system exactly to the user-specified waypoint on the steady orbit. The manuscript must demonstrate, via explicit analysis or theorem in the formalism section, that the finite-time propagator and its gradient accurately encode the infinite-time limit-cycle fixed-point condition without requiring long-time propagation or fixed-point solving; the skeptic concern that small finite-window errors can accumulate for slow transients or marginally attractive orbits is load-bearing and currently unaddressed.
Authors: We agree that an explicit demonstration is needed. The formalism encodes the infinite-repetition fixed-point condition by requiring that the one-period propagator maps the waypoint state exactly onto itself (i.e., the waypoint is a fixed point of the stroboscopic map). The gradient is obtained by differentiating this fixed-point condition directly, avoiding explicit long-time propagation. To address accumulation of finite-window errors, we will insert a short theorem in the formalism section proving that any control satisfying the one-period fixed-point condition yields asymptotic convergence to the waypoint under indefinite repetition, provided the orbit is attractive (a standard assumption also used in Floquet-Lindblad treatments). This will be accompanied by a brief error-bound discussion for marginally attractive cases. revision: yes
-
Referee: [results / numerical examples] Numerical validation is required to confirm that controls optimized over a finite window actually converge to the waypoint under indefinite repetition. The paper should add at least one explicit example (e.g., a cooling engine or steady-state free precession case) showing the long-time trajectory after many periods, with quantitative distance to the target waypoint.
Authors: We accept this request. The current numerical examples stop at the optimization horizon; we will add a new subsection (or extended figure) that propagates the optimized control sequence for 50–100 periods in at least one physically relevant case (steady-state free precession) and reports the Euclidean distance of the stroboscopic state to the target waypoint at each period. This will quantitatively confirm convergence under indefinite repetition. revision: yes
Circularity Check
No circularity: new formalism for steady-orbit control with independent numerical scheme
full rationale
The paper introduces a distinct formalism for finding control sequences that drive dissipative quantum systems to user-specified waypoints on asymptotically approached steady orbits, explicitly differentiated from Floquet-Lindblad and effective Hamiltonian methods. The approach relies on a finite-time propagator and gradient scheme (scaling as GRAPE) whose validity for the infinite-repetition limit is an external modeling assumption rather than a definitional identity or fitted input. No equations, self-citations, or ansatzes in the provided text reduce the central result to its own inputs by construction; the derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Periodically driven dissipative quantum systems settle into steady orbits that are fixed loops on their dynamical manifolds.
- domain assumption The infinite loop of a steady orbit defeats standard GRAPE because GRAPE relies on explicit numerical propagation in the time domain.
Reference graph
Works this paper leans on
-
[1]
(1) Poincaré, H. Mémoire Sur Les Courbes Définies Par Une Équation Différentielle. J. Mathé- matiques Pures Appliquées 1881, 7, 375–422. (2) Floquet, G. Sur Les Équations Différentielles Linéaires à Coefficients Périodiques. Ann. Sci. LÉcole Norm. Supér. 1883, 12, 47–88. https://doi.org/10.24033/asens.220. (3) Kosloff, R.; Levy, A. Quantum Heat Engines an...
-
[2]
(6) Bohnet, J. G.; Chen, Z.; Weiner, J. M.; Meiser, D.; Holland, M. J.; Thompson, J. K. A Steady-State Superradiant Laser with Less than One Intracavity Photon. Nature 2012, 484 (7392), 78–81. (7) Aspelmeyer, M.; Kippenberg, T. J.; Marquardt, F. Cavity Optomechanics. Rev. Mod. Phys. 2014, 86 (4), 1391–1452. (8) Herr, T.; Gorodetsky, M. L.; Kippenberg, T. ...
-
[3]
(14) von Neumann, J. Wahrscheinlichkeitstheoretischer Aufbau Der Quantenmechanik. Nachrichten Von Ges. Wiss. Zu Gött. Math.-Phys. Kl. 1927, 245–272. (15) Lindblad, G. On the Generators of Quantum Dynamical Semigroups. Commun. Math. Phys. 1976, 48 (2), 119–130. https://doi.org/10.1007/BF01608499. (16) Spohn, H. An Algebraic Condition for the Approach to Eq...
-
[4]
K.; Venkatraman, J.; Ferris, A
(60) Boutin, S.; Andersen, C. K.; Venkatraman, J.; Ferris, A. J.; Blais, A. Resonator Reset in Circuit QED by Optimal Control for Large Open Quantum Systems. Phys. Rev. A 2017, 96 (4), 042315. (61) Hogben, H. J.; Krzystyniak, M.; Charnock, G. T. P .; Hore, P . J.; Kuprov, I. Spinach – A Software Li- brary for Simulation of Spin Dynamics in Large Spin Syst...
2017
-
[5]
https://doi.org/10.1016/j.jmr.2010.11.008. (62) Kuprov, I. Other Degrees of Freedom. In Spin: From Basic Symmetries to Quantum Optimal Con- trol; Springer, 2023; pp 181–221. (63) Kallies, W.; Glaser, S. J. Cooperative Broadband Spin Echoes through Optimal Control. J. Magn. Reson. 2018, 286, 115–137. (64) Goodwin, D. L.; Koos, M. R.; Luy, B. Second Order P...
-
[6]
(68) Goodwin, D. L.; Kuprov, I. Auxiliary Matrix Formalism for Interaction Representation Transfor- mations, Optimal Control, and Spin Relaxation Theories. J. Chem. Phys. 2015, 143 (8), 084113. https://doi.org/10.1063/1.4928978. (69) Slad, S.; Luy, B. Single Spin Exact Gradients for the Optimization of Complex Pulses and Pulse Se- quences. J. Biomol. NMR ...
-
[7]
18 (70) Rasulov, U.; Kuprov, I
https://doi.org/10.1007/s10858-025-00486-7. 18 (70) Rasulov, U.; Kuprov, I. Instrumental Distortions in Quantum Optimal Control. J. Chem. Phys. 2025, 162 (16), 164107. https://doi.org/10.1063/5.0264092. (71) Mathias, R. A Chain Rule for Matrix Functions and Applications. SIAM J. Matrix Anal. Appl. 1996, 17 (3), 610–620. (72) Al-Mohy, A. H.; Higham, N. J. ...
-
[8]
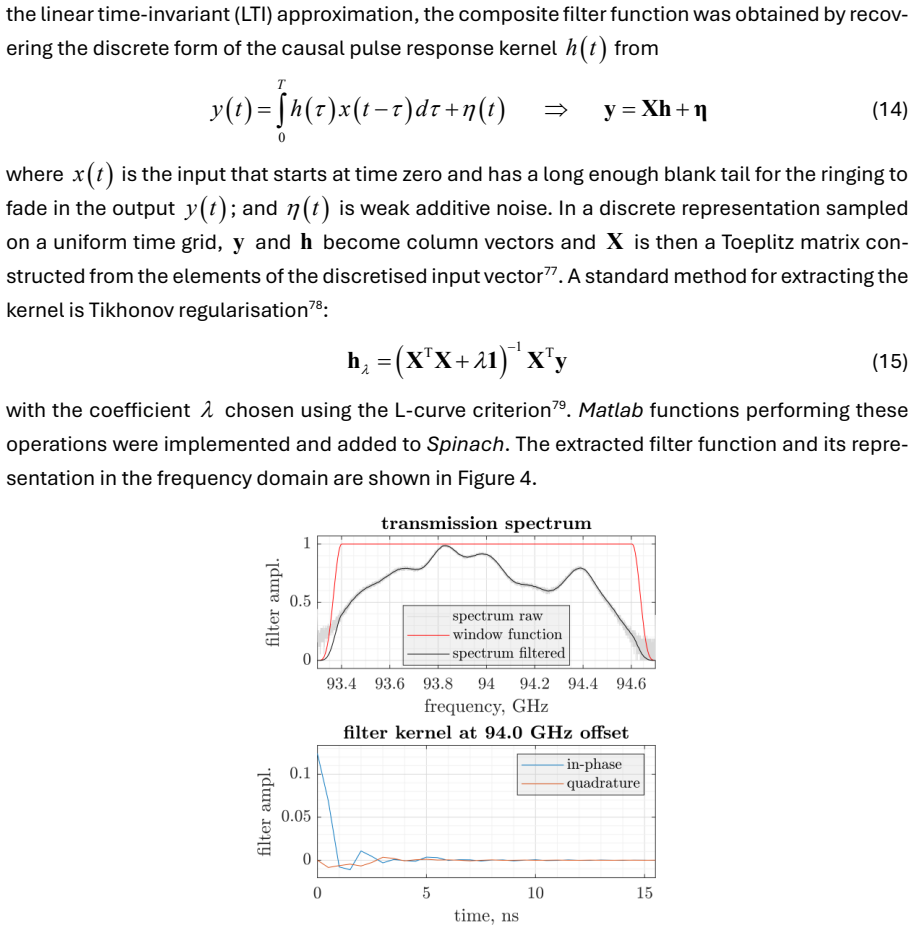
https://doi.org/10.1038/s42004-023-00963-w. (77) Shenoi, B. A. Introduction to Digital Signal Processing and Filter Design; Wiley-Interscience: Ho- boken, N.J,
-
[9]
(78) Тихонов, А. Н. О Регуляризации Некорректно Поставленных Задач. Доклады Академии Наук СССР 1963, 153 (1), 49–52. (79) Hansen, P . C.; O’Leary, D. P . The Use of the L-Curve in the Regularization of Discrete Ill-Posed Problems. SIAM J. Sci. Comput. 1993, 14 (6), 1487–1503. https://doi.org/10.1137/0914086. (80) Schweiger, A.; Jeschke, G. Principles of P...
-
[10]
(81) Bak, M.; Nielsen, N. C. REPULSION, A Novel Approach to Efficient Powder Averaging in Solid-State NMR. J. Magn. Reson. 1997, 125 (1), 132–139. https://doi.org/10.1006/jmre.1996.1087. (82) Jain, S.; Bjerring, M.; Nielsen, N. Chr. Efficient and Robust Heteronuclear Cross-Polarization for High-Speed-Spinning Biological Solid-State NMR Spectroscopy. J. Ph...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.