Embodiment Shapes Rolling Behavior in a Multimodal Infant Model
Pith reviewed 2026-06-27 01:05 UTC · model grok-4.3
The pith
A virtual infant with changing body shape learns rolling behaviors that match real infants' developmental patterns.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
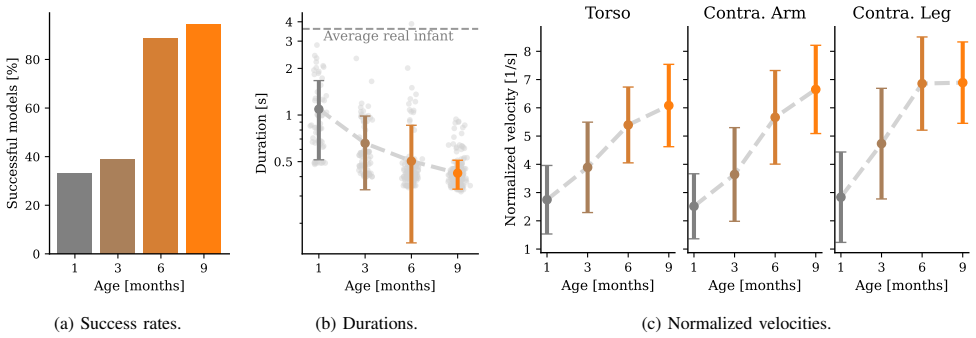
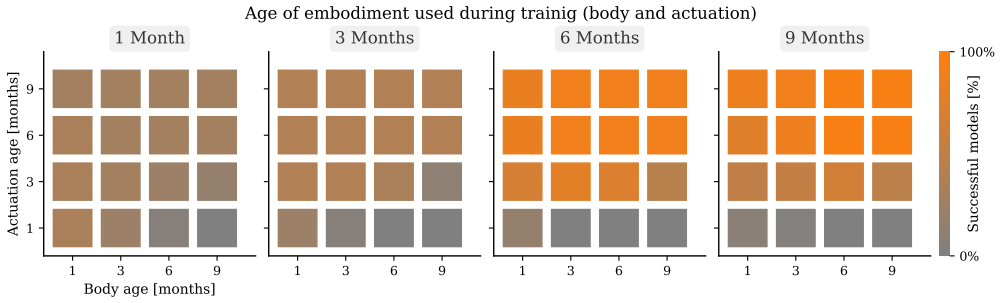
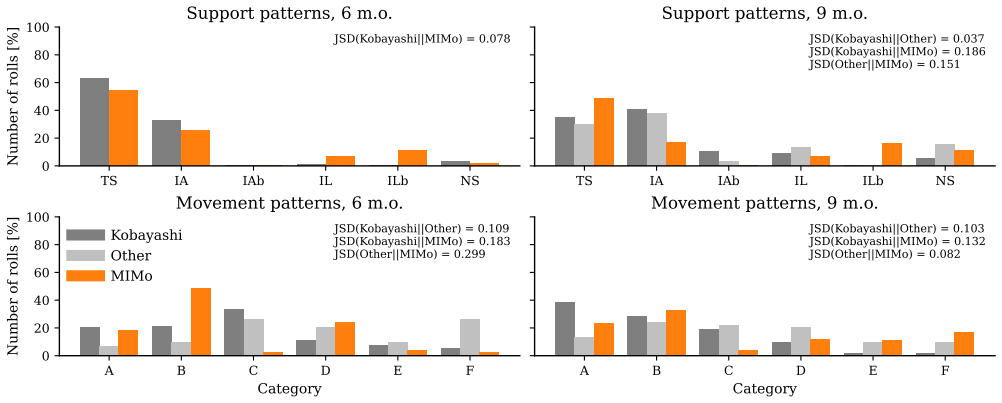
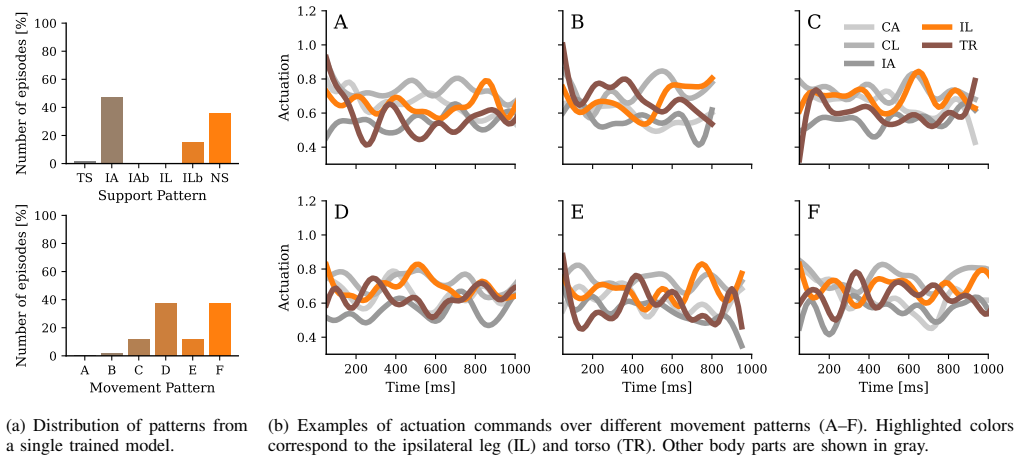
MIMo learns supine-to-prone rolls with reinforcement learning. The learned behaviors capture developmental trends and coordination patterns consistent with those reported in real infants, including improved performance and faster execution with age. The results explain how infant capabilities and constraints can give rise to realistic behaviors in artificial agents, with a particular emphasis on how motor development is shaped by the changing body morphology.
What carries the argument
MIMo, a virtual infant embodiment with proprioception and vestibular sensation, trained via reinforcement learning on rolling tasks.
If this is right
- Coordinated whole-body sensorimotor control emerges from the interaction between sensory feedback and gradual changes in body proportions.
- Performance and speed of rolling improve as the simulated body matures without explicit age-based rewards.
- Embodied computational models can reproduce observed infant coordination patterns when morphology is allowed to change.
- Motor development in agents is driven by the specific physical constraints present at each stage of growth.
Where Pith is reading between the lines
- The same modeling approach could be applied to later milestones such as crawling or walking to test whether morphology continues to shape skill acquisition.
- Robotic systems might benefit from incorporating gradual hardware changes during training to produce more natural movement sequences.
- Ignoring body growth in artificial learning setups may produce behaviors that do not scale well to changing physical forms.
Load-bearing premise
The reinforcement learning setup, proprioceptive and vestibular sensor models, and programmed body morphology changes in the simulation capture the essential sensorimotor constraints of real infants learning to roll.
What would settle it
Video analysis of real infants showing different coordination sequences during rolling, or simulation runs where freezing body morphology still produces the same age-like performance gains, would challenge the central claim.
Figures

read the original abstract
Rolling over is one of the earliest milestones in infant motor development, reflecting the emergence of coordinated, whole-body sensorimotor control. Here, we conduct a computational study of infant rolling using MIMo, a virtual infant embodiment equipped with proprioception and vestibular sensation. MIMo learns supine-to-prone rolls with reinforcement learning. Interestingly, the learned behaviors capture developmental trends and coordination patterns consistent with those reported in real infants, including improved performance and faster execution with age. Our results explain how infant capabilities and constraints can give rise to realistic behaviors in artificial agents, with a particular emphasis on how motor development is shaped by the changing body morphology. This work highlights the role of embodied computational models as a powerful tool for studying sensorimotor development.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a computational study of infant rolling using the MIMo virtual infant embodiment equipped with proprioception and vestibular sensation. The model learns supine-to-prone rolls via reinforcement learning. The authors claim that the resulting behaviors capture developmental trends and coordination patterns consistent with real infants, including improved performance and faster execution with age, and that these outcomes are shaped by changes in body morphology.
Significance. If substantiated with quantitative validation, the work would demonstrate the utility of embodied virtual models for explaining how sensorimotor constraints and morphology changes give rise to realistic motor behaviors, offering a computational lens on early infant development milestones.
major comments (2)
- [Abstract] Abstract: the claim that learned behaviors 'capture developmental trends and coordination patterns consistent with those reported in real infants, including improved performance and faster execution with age' is asserted without any description of methods, quantitative metrics (e.g., success rates, timing comparisons), validation procedures, or error analysis. This absence is load-bearing for the central claim of consistency with real data.
- [Abstract] Abstract: the assertion that results 'explain how infant capabilities and constraints can give rise to realistic behaviors' and emphasize 'changing body morphology' lacks any reported ablation, parameter sensitivity, or direct comparison to alternative models, preventing assessment of whether the RL setup and MIMo morphology are sufficient to support the explanatory claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. The comments correctly note that the abstract is highly condensed. We will revise it to better signal the quantitative support and morphology comparisons available in the main text. Point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that learned behaviors 'capture developmental trends and coordination patterns consistent with those reported in real infants, including improved performance and faster execution with age' is asserted without any description of methods, quantitative metrics (e.g., success rates, timing comparisons), validation procedures, or error analysis. This absence is load-bearing for the central claim of consistency with real data.
Authors: The abstract is a high-level summary and therefore omits methodological detail by design. The Methods section fully specifies the RL algorithm, reward structure, MIMo embodiment parameters (including age-specific mass, length, and inertia values), and the proprioceptive plus vestibular observation spaces. The Results section reports quantitative performance metrics (success rates, roll durations) and coordination measures (joint-angle timing and inter-limb phasing) together with direct numerical comparisons to published infant data and associated statistical tests. We will revise the abstract to include a brief clause referencing these quantitative validations. revision: yes
-
Referee: [Abstract] Abstract: the assertion that results 'explain how infant capabilities and constraints can give rise to realistic behaviors' and emphasize 'changing body morphology' lacks any reported ablation, parameter sensitivity, or direct comparison to alternative models, preventing assessment of whether the RL setup and MIMo morphology are sufficient to support the explanatory claim.
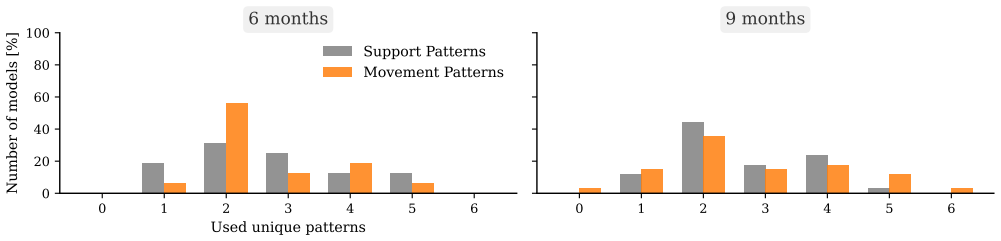
Authors: The manuscript tests the morphology hypothesis by training and evaluating three separate agents whose body parameters are scaled to newborn, 3-month, and 6-month equivalents; performance and coordination differences across these models constitute the primary evidence that morphology shapes the learned behavior. While the paper does not contain exhaustive ablations of the RL algorithm or sensory channels, the morphology-specific comparisons are reported and analyzed. We will revise the abstract to make explicit that the explanatory claim rests on these morphology-controlled experiments. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper presents a forward simulation study in which a virtual infant model (MIMo) is equipped with sensors and trained via reinforcement learning to produce supine-to-prone rolling. The resulting behaviors are compared against independently reported developmental trends from real infants. No load-bearing equations, fitted parameters renamed as predictions, or self-citation chains that reduce the central claims to the model's own inputs are present in the provided text. The derivation is therefore self-contained and externally benchmarked.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Reinforcement learning can model the emergence of infant motor skills
invented entities (1)
-
MIMo virtual infant embodiment
no independent evidence
Reference graph
Works this paper leans on
-
[1]
The development of motor behavior,
K. E. Adolph and J. M. Franchak, “The development of motor behavior,”Wiley Interdisciplinary Reviews: Cognitive Science, vol. 8, no. 1-2, p. e1430, 2017
2017
-
[2]
An update of the development of motor behavior,
J. M. Franchak and K. E. Adolph, “An update of the development of motor behavior,”Wiley Interdisciplinary Reviews: Cognitive Science, vol. 15, no. 6, p. e1682, 2024
2024
-
[3]
K. E. Adolph and S. R. Robinson,Motor Development. John Wiley & Sons, Ltd, 2015, ch. 4, pp. 1–45
2015
-
[4]
Movement patterns of limb coordination in infant rolling,
Y . Kobayashi, H. Watanabe, and G. Taga, “Movement patterns of limb coordination in infant rolling,”Experimental brain research, vol. 234, no. 12, pp. 3433–3445, 2016
2016
-
[5]
Neural maturation of the infant as exemplified in the righting reflex, or rolling from a dorsal to a prone position,
M. B. McGraw, “Neural maturation of the infant as exemplified in the righting reflex, or rolling from a dorsal to a prone position,”The Journal of Pediatrics, vol. 18, no. 3, pp. 385–394, 1941
1941
-
[6]
Does postural experience influence when babies first roll over?
S. T. Lewycky, “Does postural experience influence when babies first roll over?” Master’s thesis, University of Manitoba, 2009
2009
-
[7]
Description of adult rolling movements and hypothesis of developmental sequences,
R. R. Richter, A. F. VanSant, and R. A. Newton, “Description of adult rolling movements and hypothesis of developmental sequences,” Physical Therapy, vol. 69, no. 1, pp. 63–71, 1989
1989
-
[8]
Multiple patterns of infant rolling in limb coordination and ground contact pressure,
Y . Kobayashi, A. Yozu, H. Watanabe, and G. Taga, “Multiple patterns of infant rolling in limb coordination and ground contact pressure,” Experimental Brain Research, vol. 239, no. 9, pp. 2887–2904, 2021
2021
-
[9]
Infant muscle activity is modified by inclined environments during different styles of rolling,
D. N. Siegel, S. F. Siddicky, W. D. Davis, and E. M. Mannen, “Infant muscle activity is modified by inclined environments during different styles of rolling,”Infant Behavior and Development, vol. 79, p. 102049, 2025
2025
-
[10]
Mechanical environment influences muscle activity during infant rolling,
——, “Mechanical environment influences muscle activity during infant rolling,”Human movement science, vol. 95, p. 103208, 2024
2024
-
[11]
Muscle activation and coordinated movements of infant rolling,
——, “Muscle activation and coordinated movements of infant rolling,”Journal of biomechanics, vol. 162, p. 111890, 2024
2024
-
[12]
From rolling over to walking: Enabling humanoid robots to develop complex motor skills,
F. Meng and J. Xiao, “From rolling over to walking: Enabling humanoid robots to develop complex motor skills,”arXiv preprint arXiv:2303.02581, 2023
-
[13]
Design of a robotic infant simulator to understand the role of the trunk in infant postural stability and center of pressure,
O. F. Sowande, D. Koyner, L. Prosser, and M. J. Johnson, “Design of a robotic infant simulator to understand the role of the trunk in infant postural stability and center of pressure,” in2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN). IEEE, 2024, pp. 1005–1012
2024
-
[14]
Rolling over motion of a humanoid robot simulating human func- tional change,
T. Kanagawa, H. Takanobu, H. Hanai, K. Suzuki, and H. Miura, “Rolling over motion of a humanoid robot simulating human func- tional change,” in2018 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). IEEE, 2018, pp. 864–869
2018
-
[15]
Mimo: A multi-modal infant model for studying cognitive develop- ment in humans and ais,
D. Mattern, F. M. López, M. R. Ernst, A. Aubret, and J. Triesch, “Mimo: A multi-modal infant model for studying cognitive develop- ment in humans and ais,” in2022 ieee international conference on development and learning (icdl). IEEE, 2022, pp. 23–29
2022
-
[16]
Mimo grows! simulating body and sensory development in a mul- timodal infant model,
F. M. López, M. Lenz, M. G. Fedozzi, A. Aubret, and J. Triesch, “Mimo grows! simulating body and sensory development in a mul- timodal infant model,” in2025 IEEE International Conference on Development and Learning (ICDL). IEEE, 2025, pp. 1–6
2025
-
[17]
Goal-conditioned reinforcement learning: Problems and solutions,
M. Liu, M. Zhu, and W. Zhang, “Goal-conditioned reinforcement learning: Problems and solutions,”arXiv preprint arXiv:2201.08299, 2022
-
[18]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[19]
Stable-baselines3: Reliable reinforcement learning implementations,
A. Raffin, A. Hill, A. Gleave, A. Kanervisto, M. Ernestus, and N. Dormann, “Stable-baselines3: Reliable reinforcement learning implementations,”Journal of Machine Learning Research, vol. 22, no. 268, pp. 1–8, 2021. [Online]. Available: http://jmlr.org/papers/v22/20- 1364.html
2021
-
[20]
Policy invariance under reward transformations: Theory and application to reward shaping,
A. Y . Ng, D. Harada, and S. Russell, “Policy invariance under reward transformations: Theory and application to reward shaping,” inIcml, vol. 99. Citeseer, 1999, pp. 278–287
1999
-
[21]
How do babies roll? identifying the coordinated movements of infant rolling through video compared to laboratory techniques,
D. N. Siegel, M. M. Ogle, C. Wilson, O. Scholes, A. Prow, and E. M. Mannen, “How do babies roll? identifying the coordinated movements of infant rolling through video compared to laboratory techniques,” Technology and Health Care, vol. 32, no. 4, pp. 2527–2539, 2024
2024
-
[22]
F. M. López, H. Kanazawa, O. Fiala, Y . Balashov, V . Marcel, L. Rustler, M. Lenz, D. Kim, Y . Kuniyoshi, J. Triesch,et al., “Simulat- ing infant first-person sensorimotor experience via motion retargeting from babies to humanoids,”arXiv preprint arXiv:2604.27583, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[23]
Effects of sleep position on infant motor development,
B. E. Davis, R. Y . Moon, H. C. Sachs, and M. C. Ottolini, “Effects of sleep position on infant motor development,”Pediatrics, vol. 102, no. 5, pp. 1135–1140, 1998
1998
-
[24]
Intrinsic motivation systems for autonomous mental development,
P.-Y . Oudeyer, F. Kaplan, and V . V . Hafner, “Intrinsic motivation systems for autonomous mental development,”IEEE transactions on evolutionary computation, vol. 11, no. 2, pp. 265–286, 2007
2007
-
[25]
Infant spontaneous movement noise improves exploration in deep rl,
F. M. López, M. R. Ernst, F. Cruz, M. Hoffmann, and J. Triesch, “Infant spontaneous movement noise improves exploration in deep rl,” in2026 IEEE International Conference on Development and Learning (ICDL). IEEE, 2026, pp. 1–6
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.