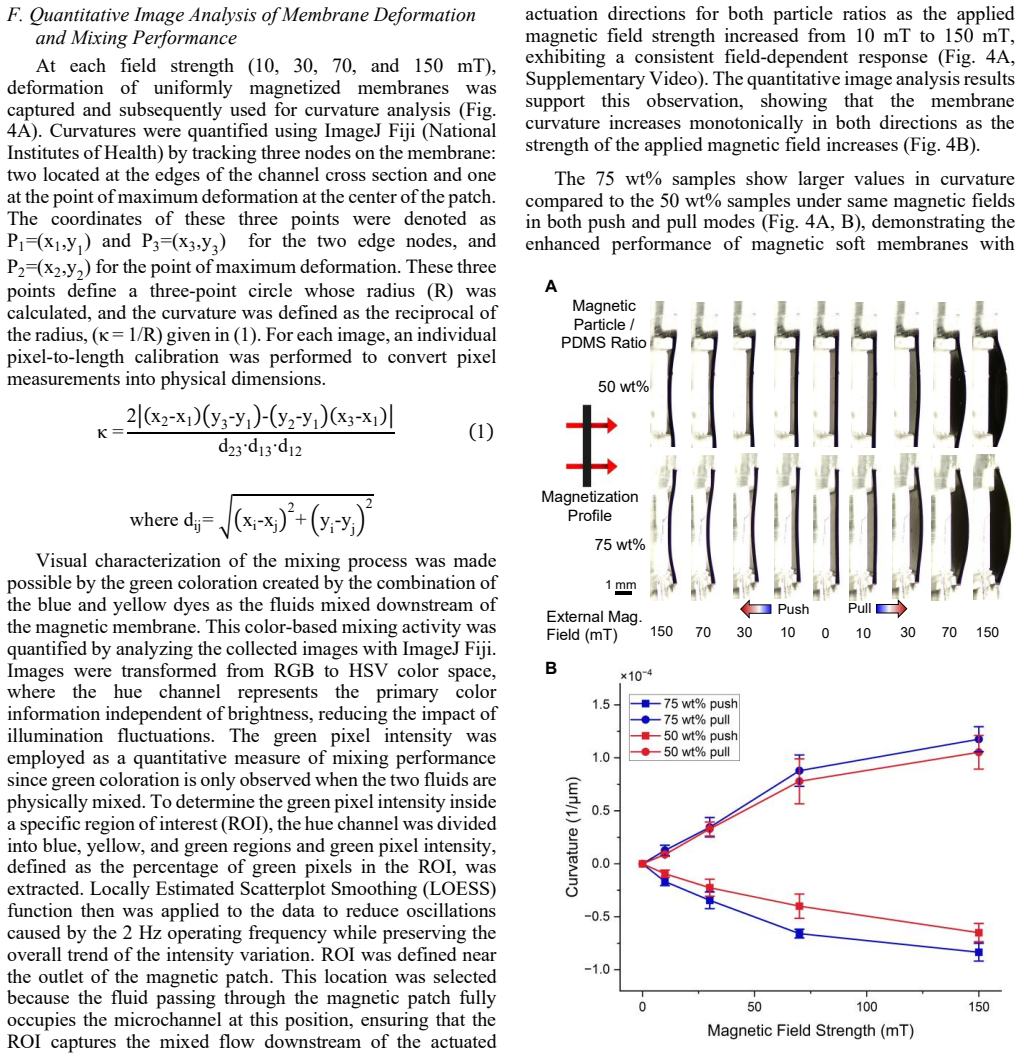
Shape-programmable Magnetic Soft Membranes for Mechanically Active Microchannels
Pith reviewed 2026-06-26 14:03 UTC · model grok-4.3
The pith
Magnetic soft membranes programmed with templates deform sinusoidally under fields to turn passive microchannel walls into active fluid interfaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A template-based magnetization method encodes patterns in soft membranes so that a uniform external magnetic field produces repeatable sinusoidal out-of-plane deformation; when the membrane forms part of a microchannel wall, this deformation converts the passive boundary into a moving interface that manipulates fluid streams and raises micromixing efficiency under laminar conditions.
What carries the argument
Template-based magnetic programming that encodes patterns for sinusoidal deformation of soft membranes under external fields.
If this is right
- A passive channel wall becomes a wirelessly actuated, shape-changing boundary.
- Fluid manipulation and micromixing become possible inside laminar regimes without mechanical pumps or valves.
- The membrane can be integrated as a modular component in existing microfluidic layouts.
- The same programming method supplies a general platform for other deformable interfaces in lab-on-chip devices.
Where Pith is reading between the lines
- Multiple membranes patterned differently could be combined to generate more complex, time-varying flow fields than a single sinusoid allows.
- Real-time adjustment of the external field strength or orientation could enable on-demand changes in mixing rate without redesigning the channel.
- The wireless nature of the actuation may simplify packaging of portable or implantable microfluidic systems.
- Scaling the membrane thickness or magnetization strength could extend the range of achievable deformations for different channel sizes.
Load-bearing premise
The sinusoidal deformation produced by the template programming is large enough and repeatable enough to change fluid flow and mixing noticeably while preserving channel integrity and biocompatibility.
What would settle it
Side-by-side measurement of mixing index or dye dispersion length in the same microchannel with the magnetic field switched off versus on, to test whether the membrane motion produces a statistically significant increase in mixing.
Figures
read the original abstract
The capability to encode spatially distinct magnetization patterns within soft materials enables remote control over complex deformations. This characteristic is especially important for microfluidic platforms, where limited dynamic control of channel boundaries and laminar flow conditions usually restrict fluid transport and interactions. The present study introduces a shape-programmable magnetic soft membrane actuator as an active microchannel component that can dynamically modulate its shape under magnetic fields and therefore the microfluidic environment. The membrane is magnetically programmed using a template-based approach, which allows it to be controllably deformed in the form of a sinusoid under the influence of an external magnetic field. The membrane's integration into a microchannel converts a passive channel wall into a dynamically changeable interface, allowing active fluid manipulation and enhancing micromixing in laminar flow conditions. The proposed approach establishes a versatile platform for wirelessly controlled deformable interfaces in next-generation microfluidic and lab-on-chip systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a shape-programmable magnetic soft membrane actuator fabricated via a template-based magnetization approach. The membrane is designed to undergo controllable sinusoidal deformation under external magnetic fields and is integrated as a channel wall in microfluidic devices, converting a passive boundary into a dynamically reconfigurable interface intended to enable active fluid manipulation and enhanced micromixing under laminar flow conditions.
Significance. If the deformation amplitude and resulting flow perturbations prove sufficient, the approach could supply a wireless, biocompatible method for boundary actuation in lab-on-chip systems where conventional rigid channels limit transport and mixing.
major comments (1)
- [Abstract] Abstract: the central claim that sinusoidal deformation 'enhances micromixing in laminar flow conditions' rests on an unquantified assumption about deformation amplitude relative to channel scale. No values are supplied for membrane deflection, wavelength, channel height, resulting velocity perturbation, mixing index, or Peclet-number comparison, preventing assessment of whether the effect exceeds a negligible perturbation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The single major comment is addressed point-by-point below. We agree that the abstract requires additional quantitative detail to support its claims and will revise accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that sinusoidal deformation 'enhances micromixing in laminar flow conditions' rests on an unquantified assumption about deformation amplitude relative to channel scale. No values are supplied for membrane deflection, wavelength, channel height, resulting velocity perturbation, mixing index, or Peclet-number comparison, preventing assessment of whether the effect exceeds a negligible perturbation.
Authors: We agree that the abstract, as currently written, does not include the specific numerical values needed to evaluate the scale of the effect. The full manuscript reports experimental measurements of membrane deflection amplitude (relative to channel height), wavelength, observed velocity perturbations, and mixing index improvements under the tested flow conditions, along with order-of-magnitude Peclet-number estimates. In the revised version we will condense these key quantities into the abstract while preserving its length, thereby allowing readers to assess whether the deformation produces a non-negligible perturbation. revision: yes
Circularity Check
No circularity; paper contains no derivations or equations.
full rationale
The manuscript is a descriptive experimental report on fabricating and integrating a magnetically programmed soft membrane into microchannels. It presents no equations, no fitted parameters, no predictions derived from models, and no load-bearing self-citations that reduce claims to prior author work. The central statements (template-based sinusoidal deformation enabling active mixing) are supported by fabrication descriptions and qualitative observations rather than any mathematical chain that could be circular. This is the expected outcome for a methods-focused robotics paper without theoretical derivations.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Biomedical applications of soft robotics,
M. Cianchetti, C. Laschi, A. Menciassi, and P. Dario, “Biomedical applications of soft robotics,” Nature Reviews Materials, vol. 3, no. 6, pp. 143 –153, May 2018, doi: https://doi.org/10.1038/s41578 -018- 0022-y
-
[2]
Small-scale soft- bodied robot with multimodal locomotion,
W. Hu, G. Z. Lum, M. Mastrangeli, and M. Sitti, “Small -scale soft- bodied robot with multimodal locomotion,” Nature, vol. 554, no. 7690, pp. 81–85, Jan. 2018, doi: https://doi.org/10.1038/nature25443
-
[3]
Millimeter-scale flexible robots with programmable three- dimensional magnetization and motions,
T. Xu, J. Zhang, M. Salehizadeh, O. Onaizah, and E. Diller, “Millimeter-scale flexible robots with programmable three - dimensional magnetization and motions,” Science Robotics, vol. 4, no. 29, Apr. 2019, doi: https://doi.org/10.1126/scirobotics.aav4494
-
[4]
Soft magnetic skin for super -resolution tactile sensing with force self-decoupling,
Y. Yan et al., “Soft magnetic skin for super -resolution tactile sensing with force self-decoupling,” Science Robotics, vol. 6, no. 51, Feb. 2021, doi: https://doi.org/10.1126/scirobotics.abc8801
-
[5]
Magnetic Soft Materials and Robots,
Y.H. Kim and X. Zhao, “Magnetic Soft Materials and Robots,” Chemical Reviews , vol. 122, no. 5, pp. 5317 –5364, Feb. 2022, doi: https://doi.org/10.1021/acs.chemrev.1c00481
-
[6]
Programming magnetic anisotropy in polymeric microactuators,
J. Kim, S. E. Chung, S. -E. Choi, H. Lee, J. Kim, and S. Kwon, “Programming magnetic anisotropy in polymeric microactuators,” Nature Materials , vol. 10, no. 10, pp. 747 –752, Aug. 2011, doi: https://doi.org/10.1038/nmat3090
-
[7]
Shape -programmable magnetic soft matter,
G. Z. Lum et al., “Shape -programmable magnetic soft matter,” Proceedings of the National Academy of Sciences, vol. 113, no. 41, Sep. 2016, doi: https://doi.org/10.1073/pnas.1608193113
-
[8]
Printing ferromagnetic domains for untethered fast-transforming soft materials,
Y. Kim, H. Yuk, R. Zhao, S. A. Chester, and X. Zhao, “Printing ferromagnetic domains for untethered fast-transforming soft materials,” Nature, vol. 558, no. 7709, pp. 274 –279, Jun. 2018, doi: https://doi.org/10.1038/s41586-018-0185-0
-
[9]
Data - driven design of shape-programmable magnetic soft materials,
A. C. Karacakol, Yunus Alapan, S. O. Demir, and Metin Sitti, “Data - driven design of shape-programmable magnetic soft materials,” Nature Communications, vol. 16, no. 1, Mar. 2025, doi: https://doi.org/10.1038/s41467-025-58091-z
-
[10]
Reprogrammable shape morphing of magnetic soft machines,
Y. Alapan, A. C. Karacakol, S. N. Guzelhan, I. Isik, and M. Sitti, “Reprogrammable shape morphing of magnetic soft machines,” Science Advances , vol. 6, no. 38, Sep. 2020, doi: https://doi.org/10.1126/sciadv.abc6414
-
[11]
F. Kocabas, O. Oguztuzun, Y. Zhou, and Y. Alapan, “Magnetic Programming of Soft Materials Using Digitally Processed Laser Heating,” 2025 IEEE International Conference on Robotics and Automation (ICRA) , pp. 15350 –15355, May 2025, doi: https://doi.org/10.1109/icra55743.2025.11127804
-
[12]
Z. Yang, C. Xu, J. X. Lee, and G. Z. Lum, “Magnetic Miniature Soft Robot with Reprogrammable Drug‐Dispensing Functionalities: Toward Advanced Targeted Combination Therapy,” Advanced Materials, vol. 36, no. 48, Sep. 2024, doi: https://doi.org/10.1002/adma.202408750. Figure 6. Micromixing experiment. A) Experimental setup for micromixing. B) Detailed view o...
-
[13]
Microporous Magnetic Soft Materials with Programmable Locomotion and On-Demand Liquid Cargo Release,
Y. Zhou, Fatih Kocabas, and Yunus Alapan, “Microporous Magnetic Soft Materials with Programmable Locomotion and On -Demand Liquid Cargo Release,” 2025 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pp. 01–06, Jul. 2025, doi: https://doi.org/10.1109/marss65887.2025.11072793
-
[14]
Lab -on-a-chip: microfluidics in drug discovery,
P. S. Dittrich and A. Manz, “Lab -on-a-chip: microfluidics in drug discovery,” Nature Reviews Drug Discovery, vol. 5, no. 3, pp. 210–218, Mar. 2006, doi: https://doi.org/10.1038/nrd1985
-
[15]
G. Cai, L. Xue, H. Zhang, and J. Lin, “A Review on Micromixers,” Micromachines, vol. 8, no. 9, p. 274, Sep. 2017, doi: https://doi.org/10.3390/mi8090274
-
[16]
Microfluidic Devices: A Tool for Nanoparticle Synthesis and Performance Evaluation,
S. Gimondi, H. Ferreira, R. L. Reis, and N. M. Neves, “Microfluidic Devices: A Tool for Nanoparticle Synthesis and Performance Evaluation,” ACS Nano, vol. 17, no. 15, pp. 14205 –14228, Jul. 2023, doi: https://doi.org/10.1021/acsnano.3c01117
-
[17]
R. Nasiri et al., “Microfluidic‐Based Approaches in Targeted Cell/Particle Separation Based on Physical Properties: Fundamentals and Applications,” Small, vol. 16, no. 29, p. 2000171, Jun. 2020, doi: https://doi.org/10.1002/smll.202000171
-
[18]
Reconstituting organ-level lung functions on a chip,
D. Huh, B. D. Matthews, A. Mammoto, M. Montoya -Zavala, H. Y. Hsin, and D. E. Ingber, “Reconstituting organ-level lung functions on a chip,” Science, vol. 328, no. 5986, pp. 1662 –8, 2010, doi: https://doi.org/10.1126/science.1188302
-
[19]
Actuation Mechanism of Microvalves: A Review,
J.-Y. Qian, C.-W. Hou, X.-J. Li, and Z. -J. Jin, “Actuation Mechanism of Microvalves: A Review,” Micromachines, vol. 11, no. 2, p. 172, Feb. 2020, doi: https://doi.org/10.3390/mi11020172
-
[20]
High-performance magnetic active-valve micropump,
M. Shen and M. A. M. Gijs, “High-performance magnetic active-valve micropump,” TRANSDUCERS 2009 - 2009 International Solid -State Sensors, Actuators and Microsystems Conference, pp. 1234–1237, Jun. 2009, doi: https://doi.org/10.1109/sensor.2009.5285881
-
[21]
Muzalifah Mohd Said, Jumril Yunas, B. Bais, Azrul Hamzah, and Burhanuddin Yeop Majlis, “The Design, Fabrication, and Testing of an Electromagnetic Micropump with a Matrix -Patterned Magnetic Polymer Composite Actuator Membrane,” Micromachines, vol. 9, no. 1, pp. 13–13, Dec. 2017, doi: https://doi.org/10.3390/mi9010013
-
[22]
Flexible pump for small-scale soft robotics: actuation, design and prospects,
H. Sun, J. Zhao, Y. Zhang, and M. Xu, “Flexible pump for small-scale soft robotics: actuation, design and prospects,” Measurement, vol. 237, p. 115299, Sep. 2024, doi: https://doi.org/10.1016/j.measurement.2024.115299
-
[23]
Design and fabrication of microfluidic mixer from carbonyl iron–PDMS composite membrane,
J. Li, M. Zhang, L. Wang, W. Li, P. Sheng, and W. Wen, “Design and fabrication of microfluidic mixer from carbonyl iron–PDMS composite membrane,” Microfluidics and Nanofluidics , vol. 10, no. 4, pp. 919 – 925, Oct. 2010, doi: https://doi.org/10.1007/s10404-010-0712-2
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.