Programmable magnetic soft robots with controlled locomotion and directional liquid cargo release
Pith reviewed 2026-06-26 13:59 UTC · model grok-4.3
The pith
Magnetic soft robots align cargo release directionally via programmed magnetization profile
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
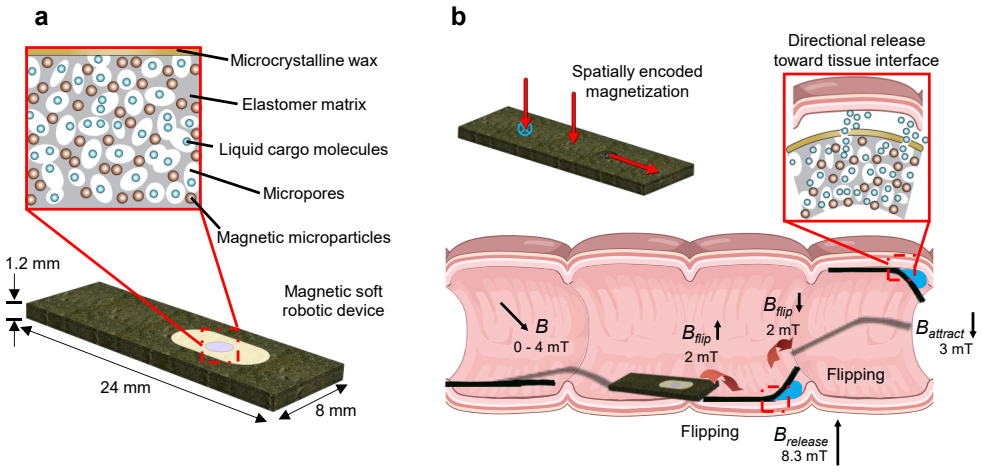
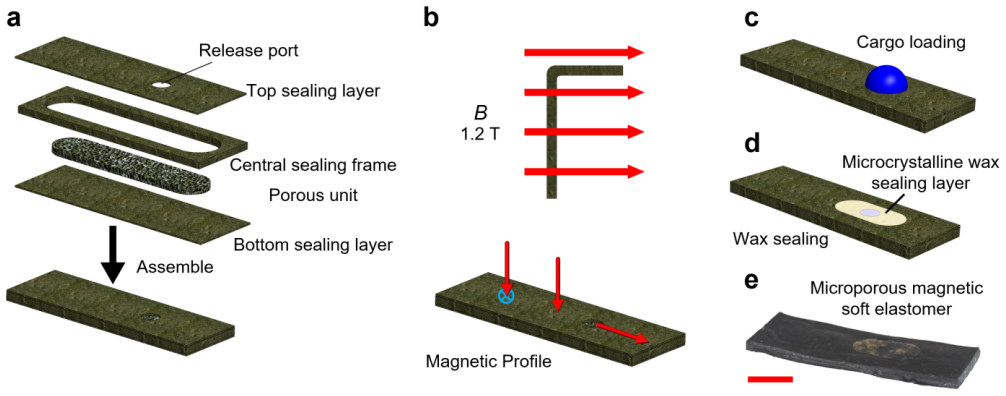
Here, we report a new design strategy that employs an optimized magnetization profile to enable controlled directional release of aqueous cargo without compromising shape morphing and locomotion capabilities. Magnetic soft robots with a specific spatially distributed magnetization profile allow directional alignment of the release interface with the orientation of the external magnetic field. This orientation control ensures active alignment of the release interface toward the intestinal wall prior to drug release. An interconnected microporous elastomer is embedded within the robot for aqueous cargo storage, while a thin microcrystalline wax layer seals the release opening hole to isolate t
What carries the argument
Spatially distributed magnetization profile that allows directional alignment of the release interface with the external magnetic field orientation
If this is right
- Controlled directional flipping, locomotion, and triggered release are decoupled through external magnetic field's direction and strength.
- The controlled directional release strategy integrates directional targeted liquid cargo release, shape morphing, and locomotion.
- This establishes the groundwork for target drug delivery in gastrointestinal tract applications.
Where Pith is reading between the lines
- The decoupling of orientation, locomotion and release via field direction and magnitude could support sequential actions such as reaching a location then aligning for release.
- Programming the magnetization profile might be extended to allow release toward different directions by changing the field without increasing its magnitude.
Load-bearing premise
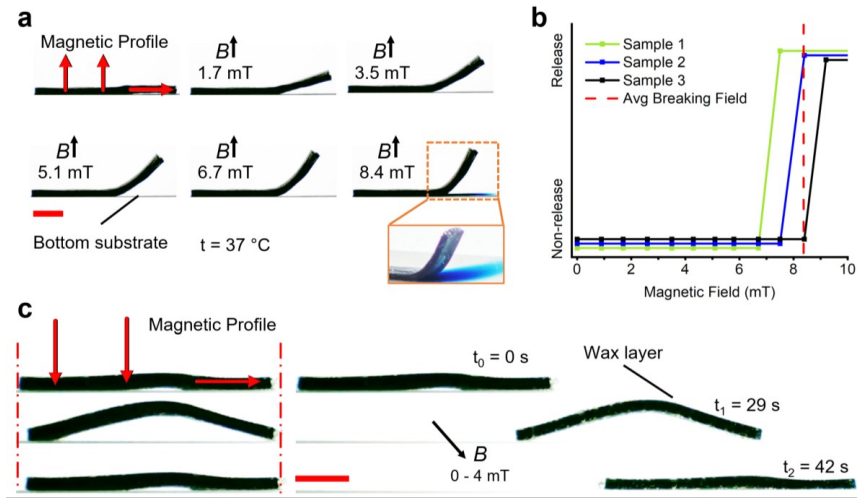
That an interconnected microporous elastomer for cargo storage combined with a thin microcrystalline wax sealing layer can maintain isolation of the liquid cargo during transport and locomotion, while allowing mechanical rupture under higher magnetic field magnitude without compromising the encoded shape morphing and locomotion capabilities.
What would settle it
If the release interface fails to align consistently with the external field direction according to the magnetization profile, or if the wax seal does not rupture selectively at higher fields while preserving morphing and locomotion, the central claim would be falsified.
Figures
read the original abstract
Magnetically programmable soft elastomers enable complex shape morphing and locomotion dynamics in small scale soft robots under external magnetic fields. Benefiting from their programmed deformation and wireless actuation capabilities, magnetic soft robots have emerged as promising platforms for targeted drug delivery, especially in human gastrointestinal tract. However, achieving controlled directional liquid cargo release toward desired tissue interface while preserving the encoded shape morphing and locomotion capabilities remain a significant challenge. Here, we report a new design strategy that employs an optimized magnetization profile to enable controlled directional release of aqueous cargo without compromising shape morphing and locomotion capabilities. Magnetic soft robots with a specific spatially distributed magnetization profile allow directional alignment of the release interface with the orientation of the external magnetic field. This orientation control ensures active alignment of the release interface toward the intestinal wall prior to drug release. An interconnected microporous elastomer is embedded within the robot for aqueous cargo storage, while a thin microcrystalline wax layer seals the release opening hole to isolate the stored liquid cargo from external environment during transport. Triggered release is achieved by mechanically rupturing the wax sealing layer under a higher magnitude external magnetic field. Controlled directional flipping, locomotion, and triggered release are decoupled through external magnetic field's direction and strength. The controlled directional release strategy reported here integrates directional targeted liquid cargo release, shape morphing, and locomotion, which establishes the groundwork for target drug delivery in gastrointestinal tract applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes a design for programmable magnetic soft robots that use a spatially distributed magnetization profile to achieve directional alignment of a liquid cargo release interface with an external magnetic field. The robots incorporate an interconnected microporous elastomer for storing aqueous cargo, sealed by a thin microcrystalline wax layer that can be mechanically ruptured by a higher-magnitude magnetic field to enable triggered directional release. The approach claims to decouple controlled directional flipping, locomotion, and triggered release via the direction and strength of the external magnetic field, without compromising shape morphing and locomotion capabilities, for applications in targeted drug delivery in the gastrointestinal tract.
Significance. If the decoupling of locomotion and release is experimentally validated without performance degradation, this work could provide a significant advancement in magnetic soft robotics for biomedical applications by enabling precise, directional cargo release in confined environments like the GI tract while maintaining wireless actuation and morphing functions.
major comments (1)
- [Abstract (paragraph on triggered release and decoupling)] The central decoupling claim (controlled directional flipping, locomotion, and triggered release via field direction and strength, without compromise to shape morphing) rests on the assumption that wax rupture under higher field is localized, does not redistribute stresses, and leaves magnetization profile and elastomer compliance unchanged. No quantitative bounds on field thresholds, wax thickness, or pre-/post-rupture locomotion metrics are supplied to support this; this is load-bearing for the main contribution.
minor comments (1)
- [Abstract] The abstract would be strengthened by a short statement on how the magnetization profile was optimized (e.g., simulation method or parameter search).
Simulated Author's Rebuttal
We thank the referee for their constructive review and positive assessment of the work's potential significance. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract (paragraph on triggered release and decoupling)] The central decoupling claim (controlled directional flipping, locomotion, and triggered release via field direction and strength, without compromise to shape morphing) rests on the assumption that wax rupture under higher field is localized, does not redistribute stresses, and leaves magnetization profile and elastomer compliance unchanged. No quantitative bounds on field thresholds, wax thickness, or pre-/post-rupture locomotion metrics are supplied to support this; this is load-bearing for the main contribution.
Authors: We agree that the decoupling claim is central and requires explicit quantitative support to demonstrate that wax rupture remains localized without affecting magnetization or compliance. The manuscript presents experimental sequences showing distinct regimes (alignment/locomotion at moderate fields and rupture at higher fields), but we acknowledge that tabulated thresholds, wax thickness specifications, and direct pre-/post-rupture locomotion comparisons are not currently provided. In the revised manuscript we will add a new subsection with measured field-strength thresholds for each function, wax-layer thickness data, and quantitative locomotion metrics (speed, trajectory fidelity) before and after rupture to confirm no performance degradation. revision: yes
Circularity Check
No circularity: design claims rest on physical mechanisms without reduction to self-definitions or fitted inputs
full rationale
The provided abstract and description present a new design strategy using spatially distributed magnetization, microporous elastomer, and wax sealing for directional release decoupled by field direction and magnitude. No equations, fitted parameters renamed as predictions, or self-citations appear in the text that would make any claim equivalent to its inputs by construction. The central claims rely on described physical behaviors (alignment, rupture, locomotion preservation) without invoking uniqueness theorems or ansatzes from prior author work. This is a standard non-finding for a design paper whose derivation chain is not mathematical or self-referential.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Small-scale soft- bodied robot with multimodal locomotion,
W. Hu, G. Z. Lum, M. Mastrangeli, and M. Sitti, “Small-scale soft- bodied robot with multimodal locomotion,” Nature, vol. 554, no. 7690, pp. 81–85, Feb. 2018, doi: 10.1038/nature25443
-
[2]
Millimeter-scale flexible robots with programmable three- dimensional magnetization and motions,
T. Xu, J. Zhang, M. Salehizadeh, O. Onaizah, and E. Diller, “Millimeter-scale flexible robots with programmable three- dimensional magnetization and motions,” Sci. Robot., vol. 4, no. 29, p. eaav4494, Apr. 2019, doi: 10.1126/scirobotics.aav4494
-
[3]
Printing ferromagnetic domains for untethered fast-transforming soft materials,
Y. Kim, H. Yuk, R. Zhao, S. A. Chester, and X. Zhao, “Printing ferromagnetic domains for untethered fast-transforming soft materials,” Nature, vol. 558, no. 7709, pp. 274–279, Jun. 2018, doi: 10.1038/s41586-018-0185-0
-
[4]
Reprogrammable shape morphing of magnetic soft machines,
Y. Alapan, A. C. Karacakol, S. N. Guzelhan, I. Isik, and M. Sitti, “Reprogrammable shape morphing of magnetic soft machines,” Sci. Adv., vol. 6, no. 38, p. eabc6414, Sep. 2020, doi: 10.1126/sciadv.abc6414
-
[6]
F. Kocabas, O. Oguztuzun, Y. Zhou, and Y. Alapan, “Magnetic Programming of Soft Materials Using Digitally Processed Laser Heating,” in 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA: IEEE, May 2025, pp. 15350–15355. doi: 10.1109/ICRA55743.2025.11127804
-
[7]
Biomedical applications of soft robotics,
M. Cianchetti, C. Laschi, A. Menciassi, and P. Dario, “Biomedical applications of soft robotics,” Nat Rev Mater, vol. 3, no. 6, pp. 143– 153, May 2018, doi: 10.1038/s41578-018-0022-y
-
[8]
Z. Yang, C. Xu, J. X. Lee, and G. Z. Lum, “Magnetic Miniature Soft Robot with Reprogrammable Drug‐Dispensing Functionalities: Toward Advanced Targeted Combination Therapy,” Advanced Materials, vol. 36, no. 48, p. 2408750, Nov. 2024, doi: 10.1002/adma.202408750
-
[9]
B. Xiao, H. Lin, E. Buckner, J. M. Pierce, J. J. Tosoian, and X. Dong, “Wireless microfluidics-enabled multifunctional miniature soft robots with multimodal locomotion for fluid manipulation,” Device, vol. 3, no. 6, p. 100713, Jun. 2025, doi: 10.1016/j.device.2025.100713
-
[10]
Y. Sun et al., “Magnetically driven capsules with multimodal response and multifunctionality for biomedical applications,” Nat Commun, vol. 15, no. 1, p. 1839, Feb. 2024, doi: 10.1038/s41467- 024-46046-9
-
[11]
Microporous Magnetic Soft Materials with Programmable Locomotion and On-Demand Liquid Cargo Release,
Y. Zhou, F. Kocabas, and Y. Alapan, “Microporous Magnetic Soft Materials with Programmable Locomotion and On-Demand Liquid Cargo Release,” in 2025 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), West Lafayette, IN, USA: IEEE, Jul. 2025, pp. 01–06. doi: 10.1109/MARSS65887.2025.11072793
-
[12]
Influence of the pore size on optical and mechanical properties of ecoflex sponges,
F. Kocaman Kabil and A. Y. Oral, “Influence of the pore size on optical and mechanical properties of ecoflex sponges,” Mater. Res. Express, vol. 11, no. 3, p. 035305, Mar. 2024, doi: 10.1088/2053- 1591/ad2a87
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.