Data-driven geometric phase in biological locomotion
Pith reviewed 2026-06-26 09:32 UTC · model grok-4.3
The pith
A Koopman autoencoder extracts geometric phase and sensitivity from biological locomotion data without mechanical models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
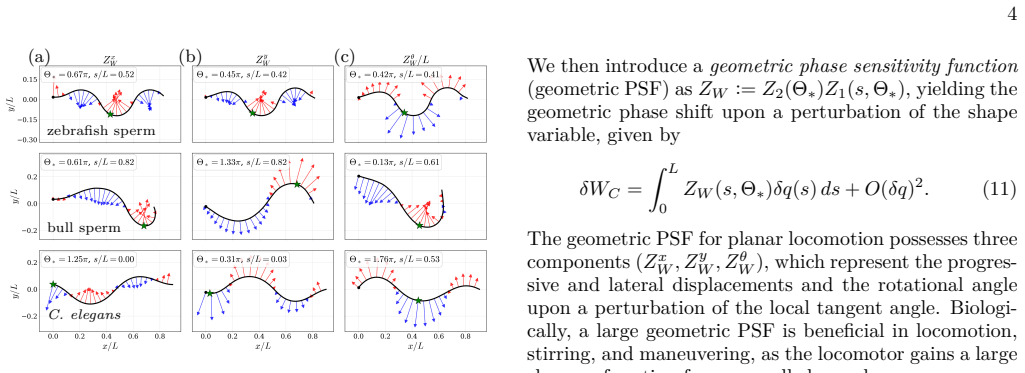
We develop a theory-guided, data-driven Koopman autoencoder to recover the limit cycle embedded in imperfect cyclic data and extract shape gaits and geometric phase from sperm and nematode data. We introduce a geometric phase sensitivity function that quantifies responses to shape perturbations and reveals mechanical information using only gauge-theoretic structure, without assuming mechanical laws.
What carries the argument
Koopman autoencoder for limit cycle recovery combined with the geometric phase sensitivity function based on gauge theory.
If this is right
- The geometric phase can be computed directly from observed shape changes in biological swimmers.
- Responses to perturbations can be quantified to predict changes in net locomotion.
- Mechanical details can be inferred solely from the mathematical structure of gauge theory.
- The approach works for both sperm and nematode data sets as demonstrations.
Where Pith is reading between the lines
- The sensitivity function might guide the design of artificial swimmers by identifying effective shape modifications.
- Similar data-driven techniques could apply to other periodic biological processes beyond locomotion.
- Comparison with traditional mechanical simulations on the same data would test the method's independence from physical assumptions.
Load-bearing premise
The assumption that the Koopman autoencoder accurately reconstructs the underlying limit cycle despite noise, sparsity, and weak periodicity in the biological data.
What would settle it
A mismatch between the predicted sensitivity to shape perturbations and the actual change in observed locomotion when shapes are altered in experiments on sperm or nematodes.
Figures
read the original abstract
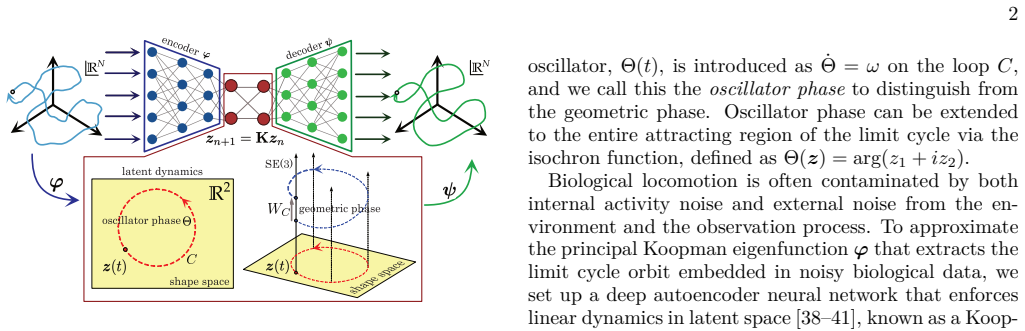
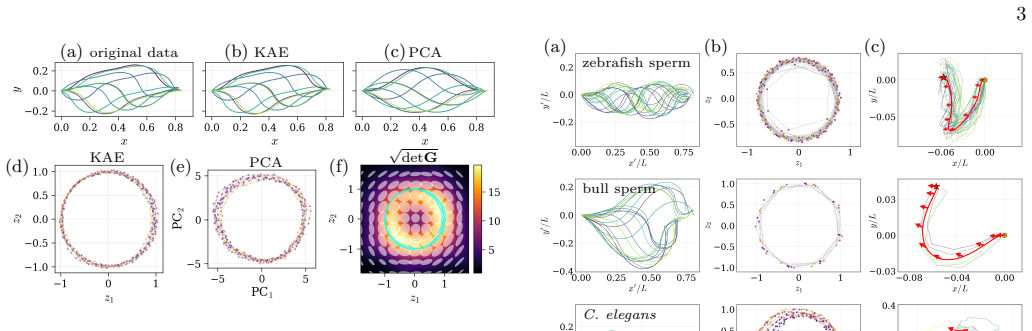
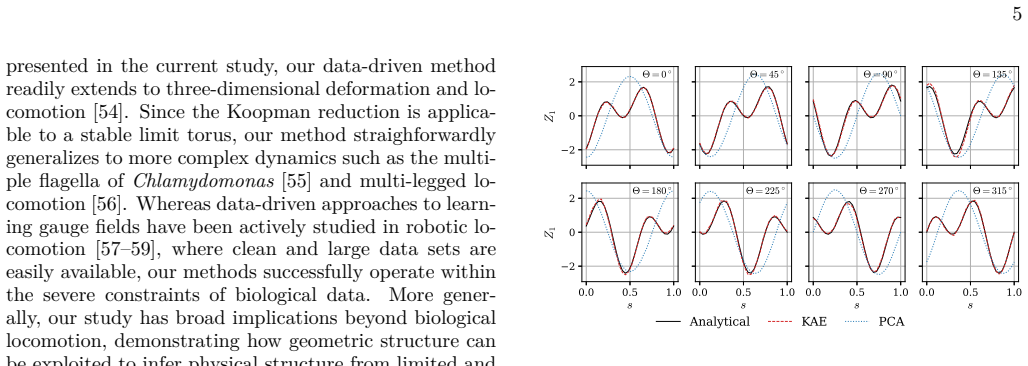
Geometric phase quantifies net locomotion in dissipative media via gauge theory, but linking this theoretical quantity to noisy, sparse, and weakly periodic biological shape data is challenging. We develop a theory-guided, data-driven Koopman autoencoder to recover the limit cycle embedded in imperfect cyclic data and extract shape gaits and geometric phase from sperm and nematode data. We introduce a geometric phase sensitivity function that quantifies responses to shape perturbations and reveals mechanical information using only gauge-theoretic structure, without assuming mechanical laws.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a theory-guided Koopman autoencoder to recover embedded limit cycles from noisy, sparse, and weakly periodic shape data of sperm and nematodes, extracts shape gaits and geometric phases, and introduces a geometric phase sensitivity function that quantifies responses to perturbations and reveals mechanical information solely from gauge-theoretic structure without assuming mechanical laws.
Significance. If the autoencoder recovery step is shown to be reliable, the work would provide a practical bridge between geometric phase theory and experimental biological locomotion data, enabling extraction of gauge-theoretic quantities and mechanical insights from imperfect cyclic observations in dissipative media. This could extend to other systems where direct mechanical modeling is intractable.
major comments (2)
- [Methods (Koopman autoencoder recovery)] The central claim that the extracted geometric phase and sensitivity function are meaningful gauge-theoretic quantities depends on accurate recovery of the underlying limit cycle. The manuscript must provide reconstruction error metrics, uniqueness arguments, or synthetic-data benchmarks (e.g., in the Methods or Results sections) demonstrating that the autoencoder does not introduce artifacts from noise or multiple possible embeddings; absent these, the quantities risk being fitting artifacts.
- [Results (application to biological data)] Validation against known analytic cases or independent measurements for sperm and nematode locomotion is needed to confirm that the sensitivity function reveals genuine mechanical information rather than model-dependent features. Cross-checks or error analysis should be reported explicitly.
minor comments (2)
- [Theory section] Notation for the geometric phase sensitivity function should be clarified with an explicit definition or equation to avoid ambiguity with standard phase definitions.
- [Figures] Figure captions for data reconstructions should include quantitative error measures (e.g., mean squared reconstruction error) for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important aspects of validation for the Koopman autoencoder and the extracted quantities. We agree that strengthening the evidence for reliable limit-cycle recovery and confirming the sensitivity function's validity will improve the manuscript. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Methods (Koopman autoencoder recovery)] The central claim that the extracted geometric phase and sensitivity function are meaningful gauge-theoretic quantities depends on accurate recovery of the underlying limit cycle. The manuscript must provide reconstruction error metrics, uniqueness arguments, or synthetic-data benchmarks (e.g., in the Methods or Results sections) demonstrating that the autoencoder does not introduce artifacts from noise or multiple possible embeddings; absent these, the quantities risk being fitting artifacts.
Authors: We agree that explicit validation of the limit-cycle recovery is necessary to support the claims. In the revised manuscript we will add reconstruction error metrics (e.g., mean-squared reconstruction error on shape variables) computed on both the experimental datasets and on controlled synthetic examples. We will also include synthetic-data benchmarks in which noisy, sparsely sampled trajectories are generated from known analytic limit cycles; the autoencoder will be shown to recover the original cycle, gait, and geometric phase to within quantifiable error bounds. A brief discussion of how the theory-guided loss constrains the embedding and mitigates non-uniqueness will be added to the Methods section. revision: yes
-
Referee: [Results (application to biological data)] Validation against known analytic cases or independent measurements for sperm and nematode locomotion is needed to confirm that the sensitivity function reveals genuine mechanical information rather than model-dependent features. Cross-checks or error analysis should be reported explicitly.
Authors: We accept that additional validation is warranted. The revised manuscript will contain a new subsection presenting results on synthetic data drawn from analytic geometric-phase models of locomotion; these tests will confirm that the sensitivity function recovers the expected perturbation responses. For the sperm and nematode applications we will report explicit cross-checks against published gait and phase values from the literature together with quantitative error bars on the extracted sensitivity functions. Because the datasets do not include simultaneous independent mechanical measurements, we will emphasize that the mechanical inferences remain gauge-theoretic and will not claim direct experimental confirmation of forces or torques. revision: partial
Circularity Check
No significant circularity in derivation chain
full rationale
The paper applies gauge-theoretic geometric phase to data recovered via a theory-guided Koopman autoencoder. No quoted step shows the phase or sensitivity function reducing to a fitted quantity by construction, a self-defined input, or a load-bearing self-citation chain; the central extraction step remains independent of the data-fitting procedure and is not forced by renaming or ansatz smuggling.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
7, whose deterministic part is known as the Stuart-Landau oscillator
Stuart-Landau oscillator and oscillator PSF The synthesized data is generated by a stochastic os- cillator in Eq. 7, whose deterministic part is known as the Stuart-Landau oscillator. Its principal Koopman eigen- function is analytically obtained as ψ(r, ϕ) = 1 r exp iΘ(r, ϕ) , (B1) with eigenvalue µ = −b+iωeff . Here ωeff = ω +b presents the phase velocity...
-
[2]
To synthesize the trajectory data, we apply resistive force theory to the shape gait generated by the stochastic dynamics of Eq
Extracting geometric phase from synthetic trajectory data We then extract the geometric phase from fluctuat- ing swimming trajectories. To synthesize the trajectory data, we apply resistive force theory to the shape gait generated by the stochastic dynamics of Eq. ( 7). Here we assume that at each time t, the instantaneous swim- ming velocity is determine...
-
[3]
Cohen, H
E. Cohen, H. Larocque, F. Bouchard, F. Nejadsattari, Y. Gefen, and E. Karimi, Nature Reviews Physics 1, 437 (2019)
2019
-
[4]
G. Ma, M. Xiao, and C. T. Chan, Nature Reviews Physics 1, 281 (2019)
2019
-
[5]
H. Xue, Y. Yang, and B. Zhang, Nature Reviews Mate- rials 7, 974 (2022)
2022
-
[6]
S. D. Kelly and R. M. Murray, Journal of Robotic Sys- tems 12, 417 (1995)
1995
-
[7]
Aguilar, T
J. Aguilar, T. Zhang, F. Qian, M. Kingsbury, B. McIn- roe, N. Mazouchova, C. Li, R. Maladen, C. Gong, M. Travers, R. L. Hatton, H. Choset, P. B. Umbanhowar, and D. I. Goldman, Reports on Progress in Physics 79, 110001 (2016) . 7
2016
-
[8]
S. Li, T. Wang, V. H. Kojouharov, J. McInerney, E. Ay- din, Y. Ozkan-Aydin, D. I. Goldman, and D. Z. Rocklin, Proceedings of the National Academy of Sciences 119, e2200924119 (2022)
2022
-
[9]
Delplace, J
P. Delplace, J. B. Marston, and A. Venaille, Science 358, 1075 (2017)
2017
-
[10]
X. Fang, K. Kruse, T. Lu, and J. Wang, Reviews of Mod- ern Physics 91, 045004 (2019)
2019
-
[11]
Z. Wang, J. Chen, and J. Ren, Physical Review E 106, L032102 (2022)
2022
-
[12]
Shapere and F
A. Shapere and F. Wilczek, Journal of Fluid Mechanics 198, 557 (1989)
1989
-
[13]
Hatton and H
R. Hatton and H. Choset, The European Physical Jour- nal Special Topics 224, 3141 (2015)
2015
-
[14]
Koens and E
L. Koens and E. Lauga, Journal of Fluid Mechanics 916, A17 (2021)
2021
-
[15]
Ishimoto, J
K. Ishimoto, J. Herault, and C. Moreau, Journal of Fluid Mechanics 1020, A1 (2025)
2025
-
[16]
K. M. Dorgan, C. J. Law, and G. W. Rouse, Proceedings of the Royal Society B: Biological Sciences 280, 20122948 (2013)
2013
-
[17]
E. E. Keaveny and A. E. X. Brown, Physical Biology 14, 025001 (2017)
2017
-
[18]
D. Zhao, B. Bittner, G. Clifton, N. Gravish, and S. Revzen, Proceedings of the National Academy of Sci- ences 119, e2113222119 (2022)
2022
-
[19]
J. M. Rieser, B. Chong, C. Gong, H. C. Astley, P. E. Schiebel, K. Diaz, C. J. Pierce, H. Lu, R. L. Hatton, H. Choset, and D. I. Goldman, Proceedings of the Na- tional Academy of Sciences 121, e2320517121 (2024)
2024
-
[20]
Lauga, The Fluid Dynamics of Cell Motility , Cam- bridge Texts in Applied Mathematics (Cambridge Uni- versity Press, Cambridge, 2020)
E. Lauga, The Fluid Dynamics of Cell Motility , Cam- bridge Texts in Applied Mathematics (Cambridge Uni- versity Press, Cambridge, 2020)
2020
-
[21]
G. J. Stephens, B. Johnson-Kerner, W. Bialek, and W. S. Ryu, PLOS Computational Biology 4, e1000028 (2008)
2008
-
[22]
Werner, J
S. Werner, J. C. Rink, I. H. Riedel-Kruse, and B. M. Friedrich, PLOS ONE 9, e113083 (2014)
2014
-
[23]
Nishiguchi, J
D. Nishiguchi, J. Iwasawa, H.-R. Jiang, and M. Sano, New Journal of Physics 20, 015002 (2018)
2018
-
[24]
B. J. Walker, S. Phuyal, K. Ishimoto, C.-K. Tung, and E. A. Gaffney, Royal Society Open Science 7, 200769 (2020)
2020
-
[25]
Gholami, R
A. Gholami, R. Ahmad, A. J. Bae, A. Pumir, and E. Bo- denschatz, New Journal of Physics 24, 053025 (2022)
2022
-
[26]
Ahmad, A
R. Ahmad, A. J. Bae, Y.-J. Su, S. Goli Pozveh, E. Bo- denschatz, A. Pumir, and A. Gholami, Soft Matter 18, 4767 (2022)
2022
-
[27]
K. E. Gutierrez, B. Thomases, P. E. Arratia, and R. D. Guy, Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences 383, 20240505 (2025)
2025
-
[28]
Ishimoto, H
K. Ishimoto, H. Gadêlha, E. A. Gaffney, D. J. Smith, and J. Kirkman-Brown, Physical Review Letters 118, 124501 (2017)
2017
-
[29]
Kralemann, L
B. Kralemann, L. Cimponeriu, M. Rosenblum, A. Pikovsky, and R. Mrowka, Physical Review E 77, 066205 (2008)
2008
-
[30]
Mauroy, I
A. Mauroy, I. Mezić, and Y. Susuki, eds., The Koopman Operator in Systems and Control: Concepts, Methodolo- gies, and Applications , Lecture Notes in Control and In- formation Sciences, Vol. 484 (Springer International Pub- lishing, Cham, 2020)
2020
-
[31]
Mezić, Notices of the American Mathematical Society 68, 10.1090/noti2306 (2021)
I. Mezić, Notices of the American Mathematical Society 68, 10.1090/noti2306 (2021)
-
[32]
S. L. Brunton, M. Budišić, E. Kaiser, and J. N. Kutz, SIAM Review (2022)
2022
-
[33]
Mauroy, I
A. Mauroy, I. Mezić, and J. Moehlis, Physica D: Nonlin- ear Phenomena 261, 19 (2013)
2013
-
[34]
Wilson and J
D. Wilson and J. Moehlis, Physical Review E 94, 052213 (2016)
2016
-
[35]
Shirasaka, W
S. Shirasaka, W. Kurebayashi, and H. Nakao, Chaos: An Interdisciplinary Journal of Nonlinear Science 27, 023119 (2017)
2017
-
[36]
Yawata, K
K. Yawata, K. Fukami, K. Taira, and H. Nakao, Chaos: An Interdisciplinary Journal of Nonlinear Science 34, 063111 (2024)
2024
-
[37]
Hiruta and K
Y. Hiruta and K. Ishimoto, Journal of the Physical Soci- ety of Japan 94, 064401 (2025)
2025
-
[38]
Yawata, R
K. Yawata, R. Sakuma, K. Fukami, K. Taira, and H. Nakao, Physical Review E 112, 064211 (2025)
2025
-
[39]
Shirasaka, W
S. Shirasaka, W. Kurebayashi, and H. Nakao, Physical Review E 95, 012212 (2017)
2017
-
[40]
Takeishi, Y
N. Takeishi, Y. Kawahara, and T. Yairi, in Proceedings of the 31st International Conference on Neural Infor- mation Processing Systems , NIPS’17 (Curran Associates Inc., Red Hook, NY, USA, 2017) pp. 1130–1140
2017
-
[41]
Lusch, J
B. Lusch, J. N. Kutz, and S. L. Brunton, Nature Com- munications 9, 4950 (2018)
2018
-
[42]
Y. Li, H. He, J. Wu, D. Katabi, and A. Torralba, in Inter- national Conference on Learning Representations (2019)
2019
-
[43]
Nayak, A
I. Nayak, A. Chakrabarti, M. Kumar, F. L. Teixeira, and D. Goswami, Scientific Reports 15, 22127 (2025)
2025
-
[44]
Y. Kato, J. Zhu, W. Kurebayashi, and H. Nakao, Math- ematics 9, 2188 (2021)
2021
-
[45]
R. Ma, G. S. Klindt, I. H. Riedel-Kruse, F. Jülicher, and B. M. Friedrich, Physical Review Letters 113, 048101 (2014)
2014
-
[46]
Arvanitidis, L
G. Arvanitidis, L. K. Hansen, and S. Hauberg, in Inter- national Conference on Learning Representations (2018)
2018
-
[47]
H. Shao, A. Kumar, and P. T. Fletcher, in 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPR W) (2018) pp. 428–4288, iSSN: 2160-7516
2018
-
[48]
Lee, A Geometric Perspective on Autoencoders (2023)
Y. Lee, A Geometric Perspective on Autoencoders (2023)
2023
-
[49]
J. S. Guasto, J. B. Estrada, F. Menolascina, L. J. Burton, M. Patel, C. Franck, A. E. Hosoi, R. K. Zimmer, and R. Stocker, Journal of The Royal Society Interface 17, 20200525 (2020)
2020
-
[50]
J. T. Pierce-Shimomura, B. L. Chen, J. J. Mun, R. Ho, R. Sarkis, and S. L. McIntire, Proceedings of the National Academy of Sciences 105, 20982 (2008)
2008
-
[51]
Mauroy and I
A. Mauroy and I. Mezić, Chaos: An Interdisciplinary Journal of Nonlinear Science 22, 033112 (2012)
2012
-
[52]
K. Egan, W. Li, and R. Carvalho, Communications Physics 7, 20 (2024)
2024
-
[53]
Ishimoto, C
K. Ishimoto, C. Moreau, and J. Herault, Journal of The Royal Society Interface 22, 20240688 (2025)
2025
-
[54]
Z. Zou, Y. Liu, Y.-N. Young, O. S. Pak, and A. C. H. Tsang, Communications Physics 5, 158 (2022)
2022
-
[55]
J. Choi, S. Deng, N. Justus, N. J. Cowan, and R. L. Hat- ton, arXiv Preprint 10.48550/arXiv.2502.17672 (2025), arXiv:2502.17672 [cs.RO]
-
[56]
Hernández-Herrera, H
P. Hernández-Herrera, H. O. Hernández, A. Bribiesca- Sanchez, F. Montoya, D. S. Díaz-Guerrero, A. Darszon, and G. Corkidi, Scientific Data 13, 505 (2026)
2026
-
[57]
K. Y. Wan, K. C. Leptos, and R. E. Goldstein, Journal of The Royal Society Interface 11, 20131160 (2014) . 8
2014
-
[58]
Chong, J
B. Chong, J. He, S. Li, E. Erickson, K. Diaz, T. Wang, D. Soto, and D. I. Goldman, Proceedings of the National Academy of Sciences 120, e2213698120 (2023)
2023
-
[59]
S. Deng, J. Liu, B. Datta, A. Pantula, D. H. Gracias, T. D. Nguyen, B. A. Bittner, and N. J. Cowan, in 2024 IEEE International Conference on Robotics and Automa- tion (ICRA) (2024) pp. 14988–14994
2024
-
[60]
R. Hu and S. Revzen, arXiv Preprint 10.48550/arXiv.2502.05309 (2025), arXiv:2502.05309 [cs.RO]
-
[61]
Y. Yang, N. L. Hecht, Y. Salaman-Maclara, N. Jus- tus, Z. A. Thomas, F. Rozaidi, and R. L. Hat- ton, arXiv Preprint 10.48550/arXiv.2503.08817 (2025), arXiv:2503.08817 [cs.RO]
-
[62]
Nakao, Contemporary Physics 57, 188 (2016)
H. Nakao, Contemporary Physics 57, 188 (2016)
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.