MoPe: Motion Permanence for Robust Monocular Gaussian Mapping in Dynamic Environments
Pith reviewed 2026-06-30 07:48 UTC · model grok-4.3
The pith
Dynamic identity in monocular Gaussian maps must persist across frames as a temporal property rather than reset per observation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
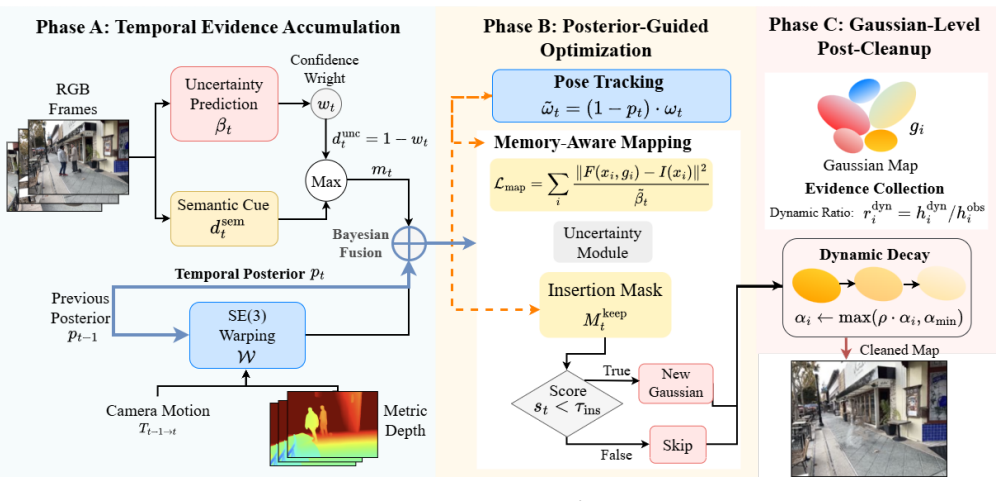
Dynamic-ness is not an instantaneous appearance property but a temporal property defined by motion history. MoPe realizes this by propagating the historical dynamic posterior through geometry-consistent SE(3) warping and fusing it with current-frame evidence using bounded Bayesian log-odds updates; the resulting posterior guides tracking, mapping, dynamic-aware Gaussian insertion, and Gaussian-level post-cleanup.
What carries the argument
Motion Permanence: the principle that an object's dynamic identity persists over time, implemented as a memory-aware uncertainty filter that warps and fuses historical posteriors to maintain temporal state inside the Gaussian map.
If this is right
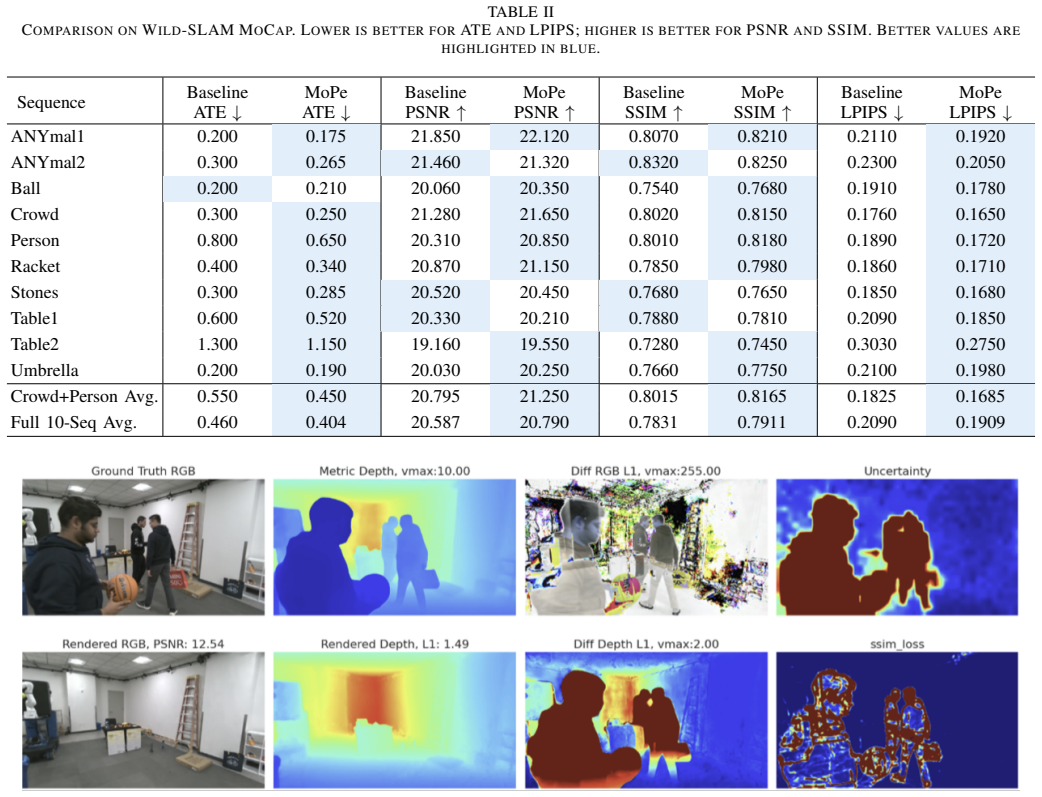
- Tracking robustness increases on Wild-SLAM, Bonn, and TUM sequences.
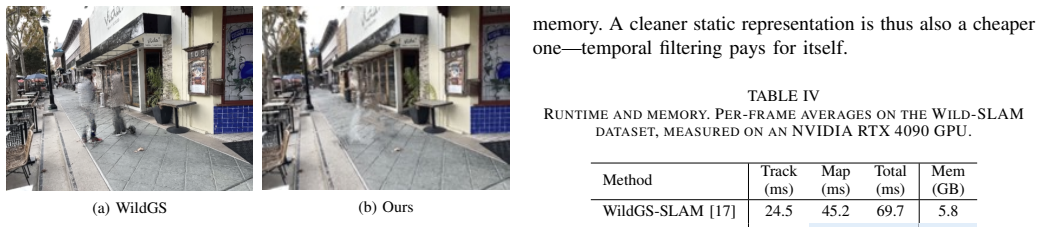
- Residual ghosting decreases, with largest gains on dynamic-human scenes that most violate the memoryless assumption.
- Dynamic-aware Gaussian insertion and post-cleanup become more reliable.
- Representation-centric autonomy becomes more reliable in changing real-world environments.
Where Pith is reading between the lines
- The same persistence filter could be ported to other explicit scene representations such as surfels or voxels.
- Extending the warp to include scale or non-rigid deformation would test whether the SE(3) assumption limits applicability to rigid-body motion only.
- Coupling the dynamic posterior with semantic labels could reduce reliance on geometry alone for identity propagation.
Load-bearing premise
Dynamic identity is fundamentally a temporal property best captured by propagating a historical posterior through geometry-consistent warping rather than re-evaluating appearance each frame.
What would settle it
A controlled comparison on the same Wild-SLAM, Bonn, and TUM sequences in which per-frame dynamic classification without any historical propagation achieves equal or lower ghosting and equal or higher tracking accuracy would falsify the claim that temporal persistence is required.
Figures
read the original abstract
Robust robot autonomy depends on scene representations that remain stable enough to support localization, navigation, and downstream decision making in dynamic environments. Monocular Gaussian Splatting SLAM provides high-fidelity mapping, but current uncertainty-aware methods still treat dynamic regions largely as per-frame observations. This makes the representation effectively memoryless: when a pedestrian slows, pauses, or reappears after occlusion, the current frame may look static, allowing dynamic content to be absorbed into the map and leaving persistent ghosting artifacts. We argue that this failure reflects a representation-level mismatch. Dynamic-ness is not an instantaneous appearance property, but a temporal property defined by motion history. Building on this view, we introduce Motion Permanence: the principle that an object's dynamic identity should persist over time rather than be re-decided from each frame independently. We realize this principle in MoPe, a memory-aware uncertainty filter for monocular Gaussian mapping. MoPe propagates the historical dynamic posterior through geometry-consistent SE(3) warping and fuses it with current-frame evidence using bounded Bayesian log-odds updates. The resulting persistent posterior guides tracking, mapping, dynamic-aware Gaussian insertion, and Gaussian-level post-cleanup. On Wild-SLAM, Bonn, and TUM sequences, MoPe improves tracking robustness and reduces residual ghosting, with the strongest gains on dynamic-human scenes that most directly violate the memoryless assumption. These results show that maintaining temporal dynamic state inside the scene representation is a practical step toward more reliable representation-centric autonomy in changing real-world environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the principle of Motion Permanence, arguing that dynamic identity in scene representations should be maintained as a temporal property via historical posterior propagation rather than decided per-frame. It realizes this in MoPe, a memory-aware uncertainty filter for monocular Gaussian Splatting SLAM, by propagating the historical dynamic posterior through geometry-consistent SE(3) warping, fusing it via bounded Bayesian log-odds updates, and using the resulting posterior to guide tracking, mapping, dynamic-aware Gaussian insertion, and post-cleanup. Experiments on Wild-SLAM, Bonn, and TUM sequences report improved tracking robustness and reduced ghosting, with largest gains on dynamic-human scenes.
Significance. If the empirical gains hold under the stated mechanism, the work provides a practical demonstration that embedding persistent temporal state inside the map representation can mitigate ghosting artifacts in dynamic environments. The explicit framing of dynamic-ness as a history-dependent property, combined with the use of standard benchmarks, offers a clear incremental advance for representation-centric SLAM methods.
major comments (1)
- [Abstract] Abstract: The central mechanism propagates the historical dynamic posterior via SE(3) warping that applies the estimated camera rigid transform. For independently moving objects (pedestrians, vehicles), the true 3D motion differs from camera SE(3), so the transported posterior attaches to incorrect locations before fusion. This directly affects the claim that temporal identity is maintained and that reported gains on dynamic-human sequences can be attributed to the Motion Permanence principle; the manuscript must either justify the assumption or provide evidence that misalignment does not occur in the evaluated sequences.
Simulated Author's Rebuttal
We thank the referee for highlighting this important aspect of the warping mechanism. We respond to the major comment below.
read point-by-point responses
-
Referee: The central mechanism propagates the historical dynamic posterior via SE(3) warping that applies the estimated camera rigid transform. For independently moving objects (pedestrians, vehicles), the true 3D motion differs from camera SE(3), so the transported posterior attaches to incorrect locations before fusion. This directly affects the claim that temporal identity is maintained and that reported gains on dynamic-human sequences can be attributed to the Motion Permanence principle; the manuscript must either justify the assumption or provide evidence that misalignment does not occur in the evaluated sequences.
Authors: We agree that applying the camera SE(3) transform to propagate posteriors attached to map Gaussians will not perfectly match the motion of independently moving objects. The geometry-consistent SE(3) warping refers to transforming the 3D Gaussian positions and associated posteriors according to the relative camera pose between frames (standard in SLAM map maintenance), rather than assuming object rigidity. The Motion Permanence principle is realized primarily through the subsequent bounded Bayesian log-odds fusion step, which integrates the (approximately) warped historical posterior with the current-frame dynamic evidence; this allows correction of small misalignments as new observations are incorporated. In the evaluated sequences, the reported gains arise because the persistent posterior prevents transient dynamic content from being inserted into the map even during momentary static appearances, rather than requiring pixel-perfect transport of the posterior. We will revise the manuscript to explicitly discuss this approximation, clarify the role of fusion in mitigating misalignment, and add a short analysis of the dynamic-human sequences to support that the benefits are attributable to temporal state maintenance. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper presents Motion Permanence as a guiding principle and realizes it through a described filter using SE(3) warping and Bayesian fusion, but supplies no equations, derivations, fitted parameters renamed as predictions, or self-citation chains that reduce the central claim to its own inputs by construction. The abstract and method description treat the approach as an engineering implementation of a temporal-state idea without any self-definitional loops or load-bearing self-references. This matches the default expectation of a non-circular practical method paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Bayesian log-odds updates can be bounded and used to fuse historical and current dynamic evidence
invented entities (1)
-
Motion Permanence
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Facil, Javier Civera, and Jose Neira
Berta Bescos, Jose M. Facil, Javier Civera, and Jose Neira. Dynaslam: Tracking, mapping, and inpainting in dynamic scenes.IEEE Robotics and Automation Letters, 3(4):4076–4083, October 2018. ISSN 2377-
2018
-
[2]
doi: 10.1109/lra.2018.2860039. URL http://dx. doi.org/10.1109/LRA.2018.2860039
-
[3]
Jan Czarnowski, Tristan Laidlow, Ronald Clark, and Andrew J. Davison. Deepfactors: Real-time probabilistic dense monocular slam.IEEE Robotics and Automation Letters, 5(2):721–728, April 2020. ISSN 2377-3774. doi: 10.1109/lra.2020.2965415. URL http://dx.doi.org/ 10.1109/LRA.2020.2965415
-
[4]
Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular, stereo, and rgb-d cameras, 2024
Huajian Huang, Longwei Li, Hui Cheng, and Sai-Kit Yeung. Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular, stereo, and rgb-d cameras, 2024. URL https://arxiv.org/abs/2311. 16728
2024
-
[5]
Splatam: Splat, track & map 3d gaussians for dense rgb-d slam, 2024
Nikhil Keetha, Jay Karhade, Krishna Murthy Jataval- labhula, Gengshan Yang, Sebastian Scherer, Deva Ra- manan, and Jonathon Luiten. Splatam: Splat, track & map 3d gaussians for dense rgb-d slam, 2024. URL https://arxiv.org/abs/2312.02126
-
[6]
What uncertainties do we need in bayesian deep learning for computer vision?,
Alex Kendall and Yarin Gal. What uncertainties do we need in bayesian deep learning for computer vision?,
-
[7]
URL https://arxiv.org/abs/1703.04977
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
DGS-SLAM: Gaussian splatting SLAM in dynamic environment,
Mangyu Kong, Jaewon Lee, Seongwon Lee, and Euntai Kim. Dgs-slam: Gaussian splatting slam in dynamic en- vironment, 2024. URL https://arxiv.org/abs/2411.10722
-
[9]
4d gaussian splatting slam,
Yanyan Li, Youxu Fang, Zunjie Zhu, Kunyi Li, Yong Ding, and Federico Tombari. 4d gaussian splatting slam,
- [10]
- [11]
- [12]
-
[13]
DINOv2: Learning Robust Visual Features without Supervision
Maxime Oquab, Timoth ´ee Darcet, Th ´eo Moutakanni, Huy V o, Marc Szafraniec, Vasil Khalidov, Pierre Fer- nandez, Daniel Haziza, Francisco Massa, Alaaeldin El- Nouby, Mahmoud Assran, Nicolas Ballas, Wojciech Galuba, Russell Howes, Po-Yao Huang, Shang-Wen Li, Ishan Misra, Michael Rabbat, Vasu Sharma, Gabriel Synnaeve, Hu Xu, Herv ´e Jegou, Julien Mairal, P...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
Refusion: 3d reconstruction in dynamic environments for rgb-d cam- eras exploiting residuals, 2019
Emanuele Palazzolo, Jens Behley, Philipp Lottes, Philippe Gigu `ere, and Cyrill Stachniss. Refusion: 3d reconstruction in dynamic environments for rgb-d cam- eras exploiting residuals, 2019. URL https://arxiv.org/ abs/1905.02082
-
[15]
Em-fusion: Dy- namic object-level slam with probabilistic data asso- ciation
Michael Strecke and Joerg Stueckler. Em-fusion: Dy- namic object-level slam with probabilistic data asso- ciation. In2019 IEEE/CVF International Conference on Computer Vision (ICCV), page 5864–5873. IEEE, October 2019. doi: 10.1109/iccv.2019.00596. URL http://dx.doi.org/10.1109/ICCV .2019.00596
-
[16]
Droid-slam: Deep visual slam for monocular, stereo, and rgb-d cameras, 2022
Zachary Teed and Jia Deng. Droid-slam: Deep visual slam for monocular, stereo, and rgb-d cameras, 2022. URL https://arxiv.org/abs/2108.10869
-
[17]
Varsplat: Uncertainty-aware 3d gaussian splatting for robust rgb-d slam, 2026
Anh Thuan Tran and Jana Kosecka. Varsplat: Uncertainty-aware 3d gaussian splatting for robust rgb-d slam, 2026. URL https://arxiv.org/abs/2603.09673
-
[18]
Haocheng Wang, Yejun Shou, Lingfeng Shen, Shuai Li, and Yanlong Cao. Rgd-slam: Robust gaussian splatting slam for dynamic environments.Pattern Recognition, 175:113071, 2026. ISSN 0031-3203. doi: https://doi.org/10.1016/j.patcog.2026.113071. URL https://www.sciencedirect.com/science/article/pii/ S0031320326000348
-
[19]
Tianyu Yang, Shuangfeng Wei, Jingxuan Nan, Mingyang Li, and Mingrui Li. Bdgs-slam: A probabilistic 3d gaussian splatting framework for robust slam in dynamic environments.Sensors, 25(21), 2025. ISSN 1424-8220. doi: 10.3390/s25216641. URL https://www.mdpi.com/ 1424-8220/25/21/6641
-
[20]
Wildgs-slam: Monocular gaussian splatting slam in dynamic environ- ments, 2025
Jianhao Zheng, Zihan Zhu, Valentin Bieri, Marc Polle- feys, Songyou Peng, and Iro Armeni. Wildgs-slam: Monocular gaussian splatting slam in dynamic environ- ments, 2025. URL https://arxiv.org/abs/2504.03886
-
[21]
Wancai Zheng, Linlin Ou, Jiajie He, Libo Zhou, Xinyi Yu, and Yan Wei. Up-slam: Adaptively structured gaus- sian slam with uncertainty prediction in dynamic envi- ronments, 2025. URL https://arxiv.org/abs/2505.22335
-
[22]
Dygs-slam: Realistic map recon- struction in dynamic scenes based on double-constrained visual slam.Remote Sensing, 17(4), 2025
Fan Zhu, Yifan Zhao, Ziyu Chen, Chunmao Jiang, Hui Zhu, and Xiaoxi Hu. Dygs-slam: Realistic map recon- struction in dynamic scenes based on double-constrained visual slam.Remote Sensing, 17(4), 2025. ISSN 2072-
2025
-
[23]
doi: 10.3390/rs17040625. URL https://www.mdpi. com/2072-4292/17/4/625
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.