WARP: Whole-Body Retargeting for Learning from Offline Human Demonstrations
Pith reviewed 2026-06-30 05:56 UTC · model grok-4.3
The pith
WARP retargets offline human demonstrations into precise whole-body robot actions for zero-shot mobile manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
WARP is the first framework to achieve zero-shot whole-body mobile manipulation directly from offline human demonstrations by using a closed-form Shoulder-Elbow-Wrist geometric solver for exact end-effector tracking that preserves structural intent, combined with lazy mobile-base control to extract consistent robot trajectories without action multi-modality.
What carries the argument
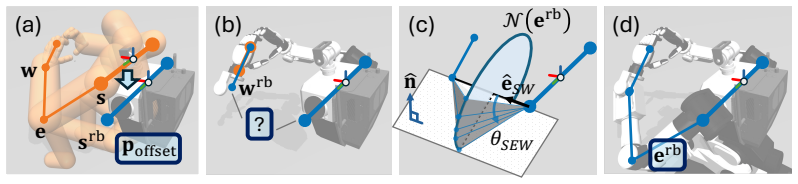
Closed-form Shoulder-Elbow-Wrist (SEW) geometric solver that computes precise end-effector tracking while preserving whole-body structural intent across embodiment gaps.
Load-bearing premise
The SEW geometric solver extracts precise and unique actions from human poses while preserving intent without creating multi-modal action distributions.
What would settle it
A policy trained via supervised learning on WARP data either converges to consistent behaviors or fails due to inconsistent trajectories in physical robot tests.
Figures


read the original abstract
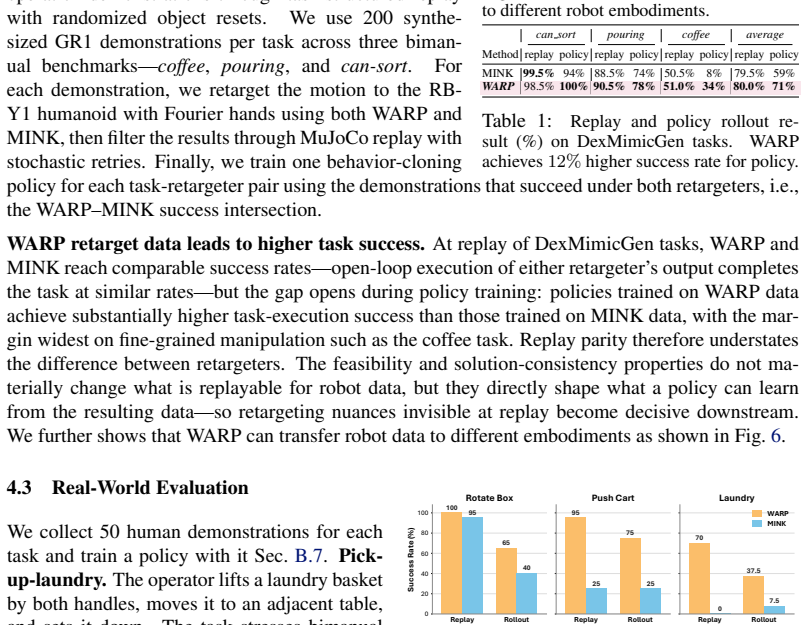
Direct transfer from human demonstration to learnable robot action is a crucial step towards scalable whole-body mobile manipulation. While human data scales better than mobile teleoperation, it requires overcoming significant embodiment gaps. Existing retargeting methods yield imprecise or inconsistent solutions, causing action multi-modality that prevents supervised policies from reliably converging. We present Whole-body-Aware Retargeting from human Pose (WARP), an offline pipeline that explicitly models embodiment differences to extract precise, unique whole-body actions. WARP leverages a closed-form Shoulder-Elbow-Wrist (SEW) geometric solver for exact end-effector tracking while preserving whole-body structural intent. Paired with lazy mobile-base control, it extracts accurate, consistent robot trajectories. Evaluations show WARP provides highly reliable data for open-loop real-world replay. To our knowledge, WARP is the first framework to achieve zero-shot whole-body mobile manipulation directly from offline human demonstrations, eliminating the need for human-in-the-loop teleoperation action data. More details on https://warp-retarget.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces WARP, an offline retargeting pipeline for whole-body mobile manipulation robots. It claims to extract precise and unique robot actions directly from human pose demonstrations by combining a closed-form Shoulder-Elbow-Wrist (SEW) geometric solver for end-effector tracking with lazy mobile-base control, thereby eliminating action multi-modality and enabling zero-shot supervised learning without any human-in-the-loop teleoperation data. The abstract asserts this is the first such framework and reports reliable open-loop real-world replay performance.
Significance. If the uniqueness and consistency claims hold with supporting analysis, the result would be significant for scalable robot learning: it would allow direct use of abundant offline human demonstration data for complex whole-body tasks, removing a major bottleneck of teleoperation collection. The closed-form solver and lazy-base approach, if shown to be parameter-free and multi-modality-free, would constitute a concrete technical contribution.
major comments (2)
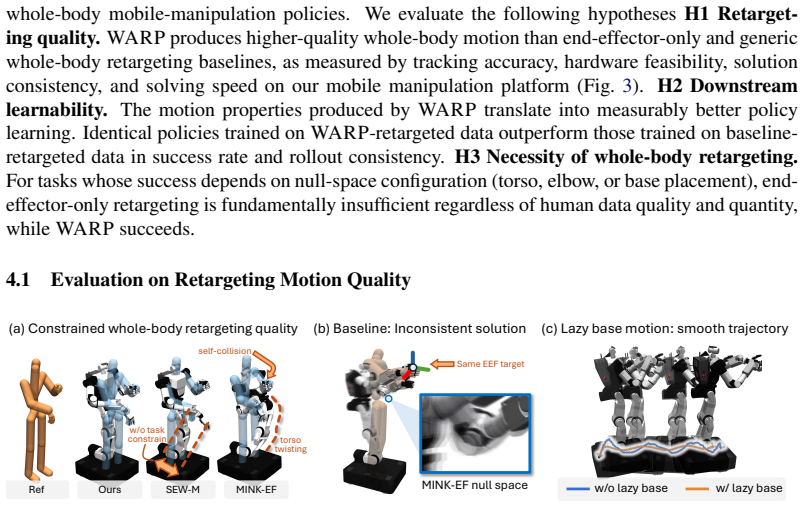
- [Abstract] Abstract: the central claim that the closed-form SEW solver plus lazy base control 'extracts accurate, consistent robot trajectories' and removes multi-modality rests on an unproven assumption. Geometric IK solvers for SEW chains are known to admit multiple solutions (elbow flip, base offset) for the same wrist target; the manuscript supplies neither a selection rule, uniqueness proof, nor empirical distribution of output variance across embodiment gaps.
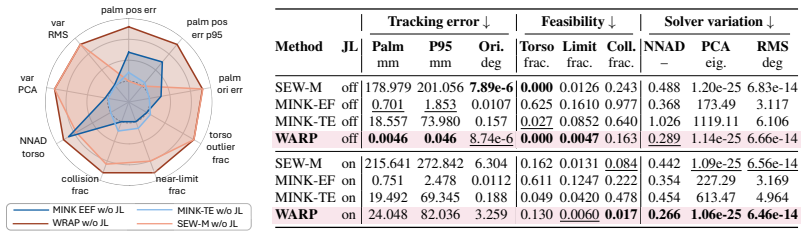
- [Abstract] Abstract: no quantitative results, error metrics, or ablation on embodiment mismatch are provided to support the assertions of 'highly reliable data' or 'zero-shot' performance; the soundness assessment is therefore limited to the abstract description alone.
minor comments (1)
- [Abstract] The supplementary website link is given but the abstract does not indicate what additional material (videos, code, datasets) is hosted there.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the paper to strengthen the presentation of the SEW solver's properties and the supporting evidence.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the closed-form SEW solver plus lazy base control 'extracts accurate, consistent robot trajectories' and removes multi-modality rests on an unproven assumption. Geometric IK solvers for SEW chains are known to admit multiple solutions (elbow flip, base offset) for the same wrist target; the manuscript supplies neither a selection rule, uniqueness proof, nor empirical distribution of output variance across embodiment gaps.
Authors: The SEW solver is formulated as a closed-form geometric procedure that directly uses the demonstrated shoulder-elbow-wrist positions to compute a unique arm configuration by preserving the human's relative joint structure and elbow position with respect to the shoulder-wrist vector; this choice rule eliminates elbow-flip ambiguity by construction. Lazy base control further removes base-offset degrees of freedom by holding the mobile base fixed during arm motion. We will add an explicit subsection in the method describing this selection mechanism, a short uniqueness argument based on the closed-form equations, and an empirical plot of output variance across embodiment gaps in the revised manuscript. revision: yes
-
Referee: [Abstract] Abstract: no quantitative results, error metrics, or ablation on embodiment mismatch are provided to support the assertions of 'highly reliable data' or 'zero-shot' performance; the soundness assessment is therefore limited to the abstract description alone.
Authors: The abstract is intentionally concise; the full manuscript contains quantitative tracking error metrics, real-world open-loop replay success rates, and embodiment-mismatch ablations in the Experiments section. To address the concern we will insert a brief sentence with key numerical results into the abstract and ensure the zero-shot claim is tied to the reported metrics in the revision. revision: yes
Circularity Check
No circularity; derivation self-contained via geometric construction
full rationale
The abstract and described pipeline present WARP as a direct geometric retargeting method using a closed-form SEW solver plus lazy base control to produce consistent trajectories. No equations, fitted parameters renamed as predictions, or self-citation chains are shown that reduce the uniqueness or consistency claims to inputs by construction. The method is positioned as addressing embodiment gaps through explicit modeling, with external evaluation claims, satisfying the criteria for a non-circular, self-contained derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Embodiment differences can be explicitly modeled via a closed-form SEW geometric solver to yield precise and unique robot actions.
Reference graph
Works this paper leans on
-
[1]
Z. Fu, T. Z. Zhao, and C. Finn. Mobile ALOHA: Learning bimanual mobile manipulation with low-cost whole-body teleoperation. InProceedings of The 8th Conference on Robot Learning, 2024
2024
-
[2]
Open-television: Teleoperation with immersive active visual feedback,
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang. Open-television: Teleoperation with immer- sive active visual feedback, 2024. URLhttps://arxiv.org/abs/2407.01512
-
[3]
X. Xu, J. Park, H. Zhang, E. Cousineau, A. Bhat, J. Barreiros, D. Wang, and S. Song. Hommi: Learning whole-body mobile manipulation from human demonstrations.arXiv preprint arXiv:2603.03243, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [4]
-
[5]
P. Sundaresan, R. Malhotra, P. Miao, J. Yang, J. Wu, H. Hu, R. Antonova, F. Engelmann, D. Sadigh, and J. Bohg. Homer: Learning in-the-wild mobile manipulation via hybrid imitation and whole-body control, 2025. URLhttps://arxiv.org/abs/2506.01185
- [6]
-
[7]
I. Guzey, H. Qi, J. Urain, C. Wang, J. Yin, K. Bodduluri, M. M. Lambeta, L. Pinto, A. Rai, J. Malik, T. Wu, A. Sharma, and H. Bharadhwaj. Dexterity from smart lenses: Multi-fingered robot manipulation with in-the-wild human demonstrations, 2025. URLhttps://arxiv. org/abs/2511.16661
-
[8]
C. Kong, Y . Cho, W. Jung, I. Wibowo, P. Shinde, S. Vinodh-Sangeetha, L. K. Chung, Z. Chen, A. Mattei, A. Nidumukkala, A. Elias, D. Xu, T. Higgins, and S. Kousik. A closed- form geometric retargeting solver for upper body humanoid robot teleoperation, 2026. URL https://arxiv.org/abs/2602.01632
-
[9]
K. Zakka. Mink: Python inverse kinematics for robotic systems.https://github.com/ kevinzakka/mink, 2024. Software library
2024
- [10]
-
[11]
P. Wu, Y . Shentu, Z. Yi, X. Lin, and P. Abbeel. GELLO: A general, low-cost, and intuitive teleoperation framework for robot manipulators. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2024
-
[12]
R. Ding, Y . Qin, J. Zhu, C. Jia, S. Yang, R. Yang, X. Qi, and X. Wang. Bunny-VisionPro: Real-time bimanual dexterous teleoperation for imitation learning, 2024
2024
-
[13]
C. Chi, Z. Xu, C. Pan, E. Cousineau, B. Burchfiel, S. Feng, R. Tedrake, and S. Song. Universal manipulation interface: In-the-wild robot teaching without in-the-wild robots. InRobotics: Science and Systems (RSS), 2024
2024
-
[14]
C. Wang, H. Shi, W. Wang, R. Zhang, L. Fei-Fei, and C. K. Liu. DexCap: Scalable and portable mocap data collection system for dexterous manipulation. InRobotics: Science and Systems (RSS), 2024
2024
-
[15]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware. InRobotics: Science and Systems (RSS), 2023
2023
-
[16]
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. InRobotics: Science and Systems (RSS), 2023. 9
2023
-
[17]
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. Fos- ter, G. Lam, P. Sanketi, Q. Vuong, T. Kollar, B. Burchfiel, R. Tedrake, D. Sadigh, S. Levine, P. Liang, and C. Finn. OpenVLA: An open-source vision-language-action model. InConfer- ence on Robot Learning (CoRL), 2024
2024
-
[18]
Black, N
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Haus- man, B. Ichter, S. Jakubczak, T. Jones, L. Ke, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, L. X. Shi, J. Tanner, Q. Vuong, A. Walling, H. Wang, and U. Zhilinsky.π 0: A vision-language-action flow model for general robot control, 2024
2024
- [19]
-
[20]
Y . Jiang, R. Zhang, J. Wong, C. Wang, Y . Ze, H. Yin, C. Gokmen, S. Song, J. Wu, and L. Fei- Fei. BEHA VIOR robot suite: Streamlining real-world whole-body manipulation for everyday household activities, 2025. URLhttps://arxiv.org/abs/2503.05652
- [21]
- [22]
- [23]
-
[24]
A. J. Elias and J. T. Wen. Redundancy parameterization and inverse kinematics of 7-dof revo- lute manipulators.Mechanism and Machine Theory, 204:105824, 2024
2024
-
[25]
A. J. Elias and J. T. Wen. Ik-geo: Unified robot inverse kinematics using subproblem decom- position.Mechanism and Machine Theory, 209:105971, 2025
2025
-
[26]
Aria Gen 2: An advanced research device for egocentric ai research
Project Aria Team. Aria Gen 2: An advanced research device for egocentric ai research. https://www.projectaria.com/ariagen2devicepaper, 2025. Accessed: 2026-05-29
2025
-
[27]
BONES-SEED: Skeletal everyday embodiment dataset.https:// huggingface.co/datasets/bones-studio/seed, 2026
Bones Studio. BONES-SEED: Skeletal everyday embodiment dataset.https:// huggingface.co/datasets/bones-studio/seed, 2026. Hugging Face dataset. Accessed: 2026-05-10
2026
-
[28]
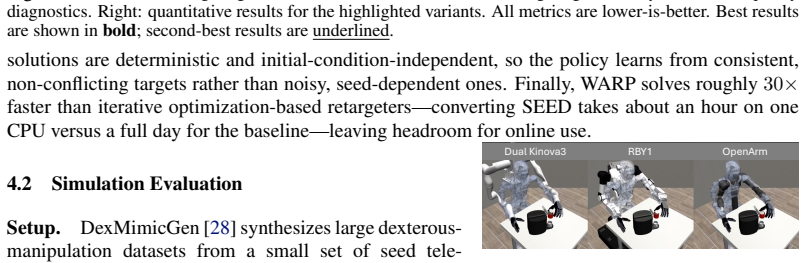
Z. Jiang, Y . Xie, K. Lin, Z. Xu, W. Wan, A. Mandlekar, L. Fan, and Y . Zhu. Dexmimicgen: Automated data generation for bimanual dexterous manipulation via imitation learning. In 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. 10 Supplementary Material Supplementary Material 11 A Why Existing Retargeting Fails? 11 A.1 MINK Base...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.