Robust and Efficient Monocular 3D Gaussian SLAM for Kilometer-Scale Outdoor Scenes
Pith reviewed 2026-06-30 05:54 UTC · model grok-4.3
The pith
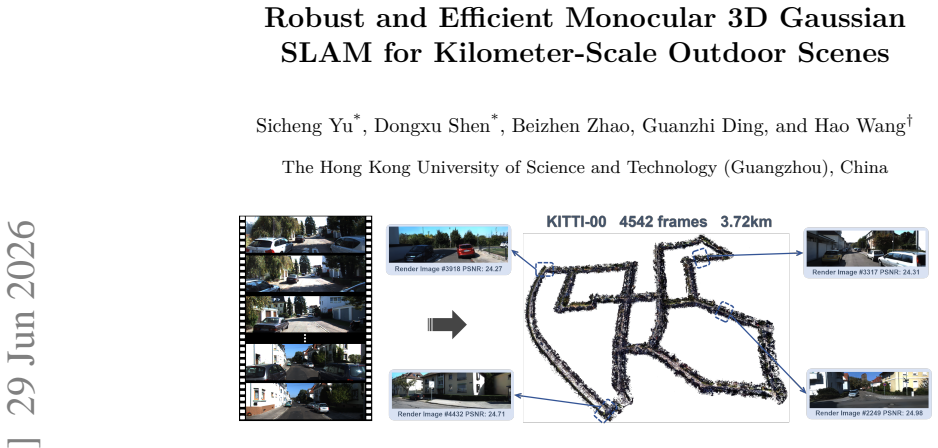
KiloGS-SLAM keeps camera poses stable and memory low while scaling monocular 3D Gaussian mapping to kilometer outdoor scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
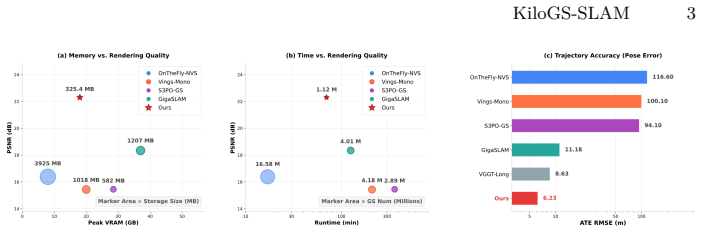
KiloGS-SLAM jointly solves fragile long-term pose tracking and excessive memory overhead in monocular 3DGS-SLAM for kilometer-scale scenes through a motion-adaptive hybrid tracking module and a lifecycle-managed Gaussian mapping strategy, achieving state-of-the-art performance on challenging outdoor datasets with sequences over 10,000 frames on a single GPU.
What carries the argument
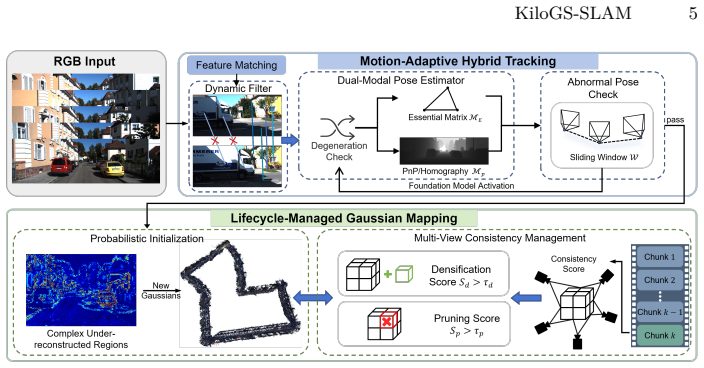
Motion-adaptive hybrid tracking module whose condition-triggered three-tier pipeline switches between Essential matrix and PnP models, together with the lifecycle-managed Gaussian mapping that applies probabilistic initialization, chunk-based multi-view densification, and pruning.
If this is right
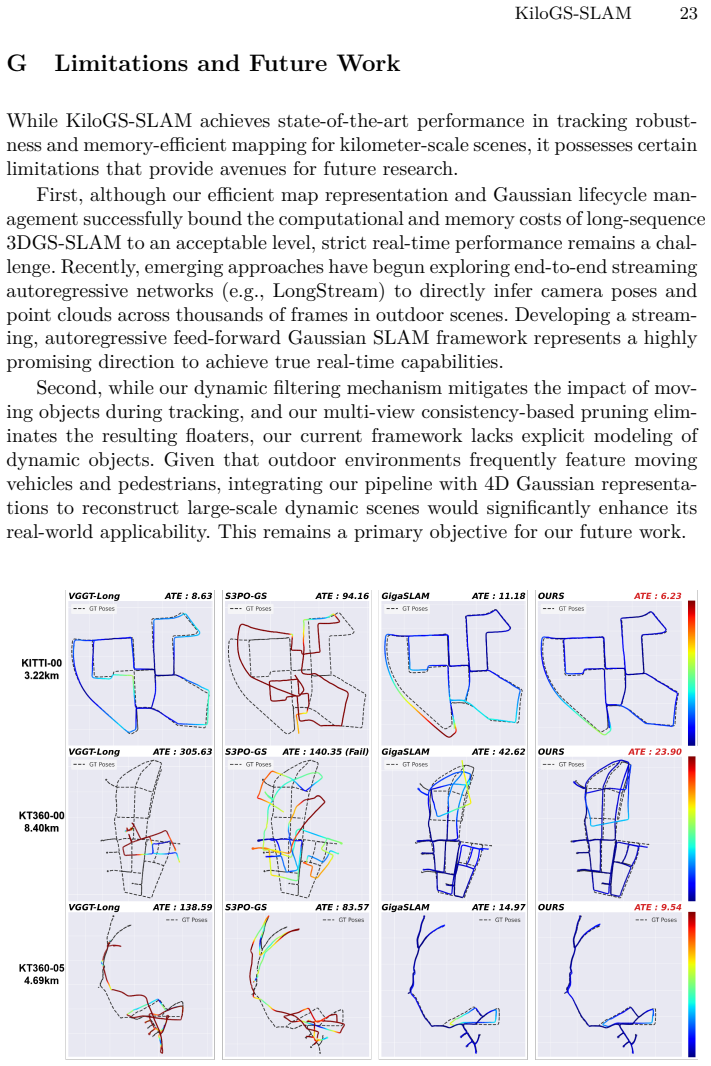
- Drift-free poses supplied by the hybrid tracker supply the geometric foundation required for accurate large-scale mapping.
- The lifecycle-managed mapping keeps primitive count low enough for sustained operation across long trajectories without memory exhaustion.
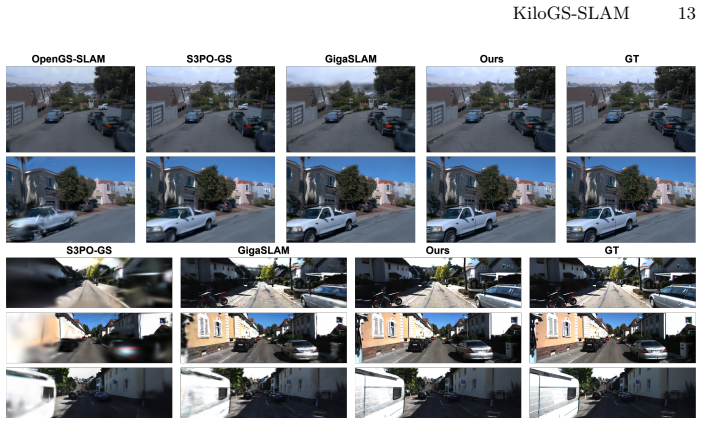
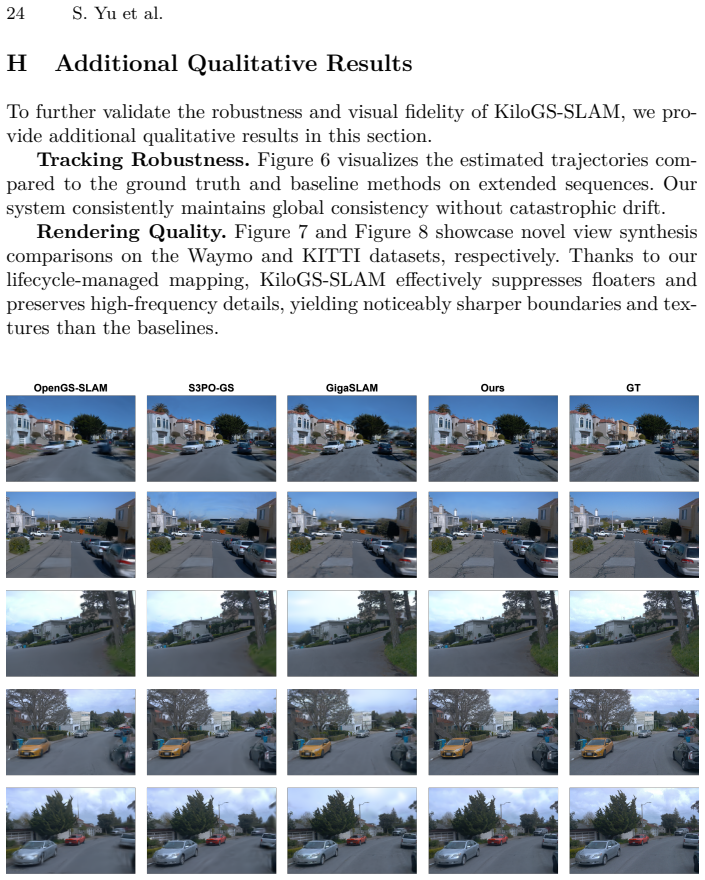
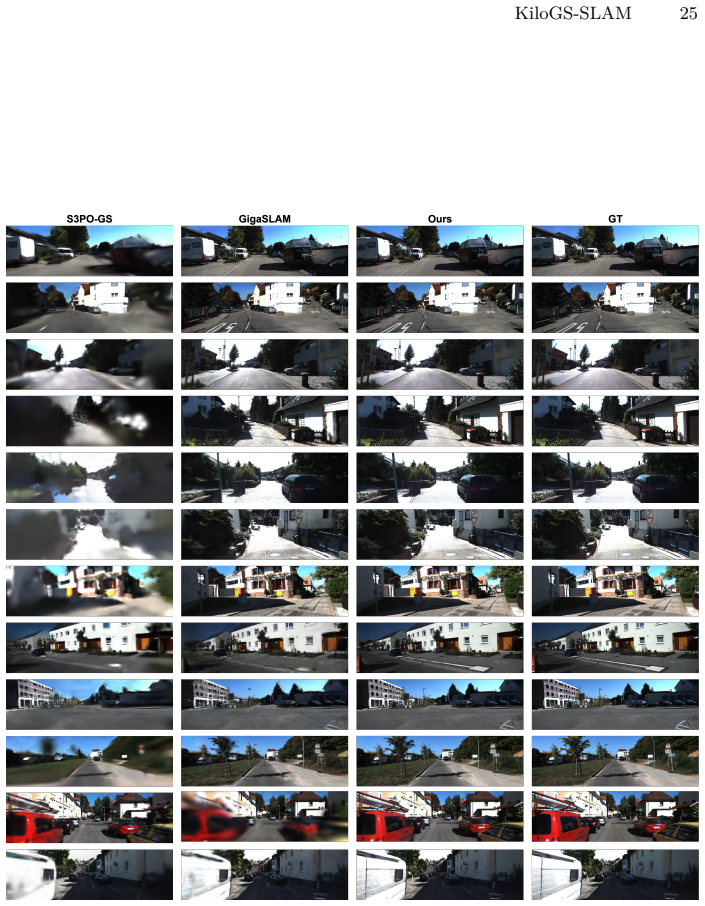
- The full pipeline produces state-of-the-art tracking accuracy and rendering quality on the tested outdoor datasets.
- The system runs sequences exceeding 10,000 frames on a single GPU.
Where Pith is reading between the lines
- The same switching logic between geometric solvers and learned rescue could be added to other monocular SLAM back-ends that currently fail on degenerate motion.
- Chunk-based densification and pruning may reduce memory growth in any Gaussian-based reconstruction pipeline, not only SLAM.
- On-demand foundation-model rescue points toward future systems that combine classical geometry checks with learned components only when needed.
Load-bearing premise
The condition-triggered pipeline can correctly detect when to switch models and when to invoke the foundation model to prevent unrecoverable drift.
What would settle it
Running the system on any of the three outdoor test sequences longer than 10,000 frames and finding either tracking loss that the foundation model does not recover or memory use that exceeds a single GPU before the sequence ends.
Figures
read the original abstract
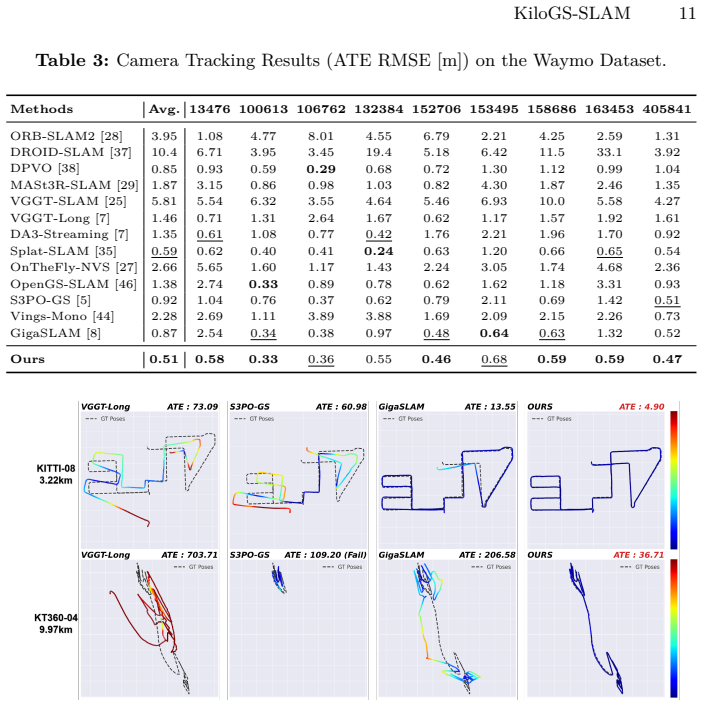
Scaling monocular 3D Gaussian Splatting (3DGS) SLAM to kilometer-level outdoor environments poses two tightly coupled challenges: fragile long-term pose tracking and excessive memory overhead during large-scale mapping. In this paper, we propose KiloGS-SLAM, a highly efficient and robust monocular 3DGS-SLAM system that jointly addresses both bottlenecks. Since high-fidelity scene reconstruction fundamentally relies on drift-free camera poses, we first introduce a motion-adaptive hybrid tracking module. This module features a condition-triggered three-tier solving pipeline. It dynamically switches between Essential matrix and PnP models to handle geometric degeneracies. An on-demand foundation model can also be activated to rescue the trajectory from catastrophic drift. To ensure the system can sustain these long trajectories without memory exhaustion, we subsequently design a lifecycle-managed Gaussian mapping strategy. By integrating probabilistic initialization with chunk-based multi-view densification and pruning, this full-pipeline optimization effectively reduces primitive redundancy while preserving high-frequency details. Together, the robust tracking guarantees the geometric foundation required for accurate mapping, while the memory-efficient lifecycle-managed mapping enables large-scale operation. Extensive experiments across three challenging outdoor datasets demonstrate that our approach achieves state-of-the-art tracking accuracy and rendering quality, successfully scaling to sequences of over 10,000 frames on a single GPU.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents KiloGS-SLAM, a monocular 3D Gaussian Splatting SLAM system for kilometer-scale outdoor scenes. It introduces a motion-adaptive hybrid tracking module featuring a condition-triggered three-tier pipeline that switches between Essential matrix and PnP solvers while using an on-demand foundation model to rescue from drift, paired with a lifecycle-managed Gaussian mapping strategy that employs probabilistic initialization, chunk-based multi-view densification, and pruning to control memory use. Experiments on three challenging outdoor datasets are said to demonstrate state-of-the-art tracking accuracy and rendering quality while scaling to sequences exceeding 10,000 frames on a single GPU.
Significance. If the long-term robustness claims hold, the work would advance scalable 3DGS SLAM for large outdoor environments by jointly addressing pose drift and memory overhead, enabling applications in autonomous driving and large-scale reconstruction where prior methods typically fail.
major comments (1)
- [§3.2] §3.2 (Motion-Adaptive Hybrid Tracking Module): The three-tier pipeline is described as dynamically switching between Essential matrix and PnP models to handle geometric degeneracies, with on-demand foundation-model rescue. No explicit decision criteria (reprojection thresholds, eigenvalue ratios of the essential matrix, degeneracy scores, or failure-detection heuristics) are supplied. Without these, the reliability of the switches cannot be verified and the drift-free tracking claim over >10k frames remains untestable.
minor comments (1)
- [Abstract] Abstract: The SOTA claims are stated without any numerical metrics, error values, or dataset-specific results, which weakens immediate substantiation even though the full experiments section presumably contains them.
Simulated Author's Rebuttal
We thank the referee for the constructive comment regarding the decision criteria in the motion-adaptive hybrid tracking module. We agree that explicit details are required for reproducibility and will incorporate them in the revision.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Motion-Adaptive Hybrid Tracking Module): The three-tier pipeline is described as dynamically switching between Essential matrix and PnP models to handle geometric degeneracies, with on-demand foundation-model rescue. No explicit decision criteria (reprojection thresholds, eigenvalue ratios of the essential matrix, degeneracy scores, or failure-detection heuristics) are supplied. Without these, the reliability of the switches cannot be verified and the drift-free tracking claim over >10k frames remains untestable.
Authors: We acknowledge that while the manuscript refers to a 'condition-triggered' pipeline, it does not supply the concrete thresholds, eigenvalue ratios, degeneracy scores, or failure-detection heuristics used to switch between the Essential matrix solver, PnP solver, and foundation-model rescue. We will revise Section 3.2 to include these explicit criteria (e.g., reprojection error thresholds for solver selection, condition number or eigenvalue ratio tests for degeneracy detection, and heuristics for triggering the foundation model), together with pseudocode of the three-tier decision logic. This addition will make the switching behavior verifiable and strengthen support for the long-sequence tracking results. revision: yes
Circularity Check
No circularity; claims rest on external dataset evaluation
full rationale
The paper proposes two new algorithmic modules (motion-adaptive hybrid tracking with three-tier pipeline and lifecycle-managed Gaussian mapping) and supports its scaling claims via experiments on three external outdoor datasets. No equations, parameters, or uniqueness theorems are shown to reduce to self-fit inputs or self-citations. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption High-fidelity scene reconstruction fundamentally relies on drift-free camera poses
Reference graph
Works this paper leans on
-
[1]
IEEE transactions on robotics37(6), 1874–1890 (2021)
Campos, C., Elvira, R., Rodríguez, J.J.G., Montiel, J.M., Tardós, J.D.: Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE transactions on robotics37(6), 1874–1890 (2021)
2021
-
[2]
Longstream: Long-sequence streaming autoregressive visual geometry.arXiv preprint arXiv:2602.13172,
Cheng, C., Chen, X., Xie, T., Yin, W., Ren, W., Zhang, Q., Guo, X., Wang, H.: Longstream: Long-sequence streaming autoregressive visual geometry. arXiv preprint arXiv:2602.13172 (2026)
-
[3]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Cheng, C., Hu, Y., Yu, S., Zhao, B., Wang, Z., Wang, H.: Reggs: Unposed sparse views gaussian splatting with 3dgs registration. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 8100–8109 (2025)
2025
-
[4]
arXiv preprint arXiv:2507.18541 (2025)
Cheng, C., Wang, Z., Yu, S., Hu, Y., Yao, N., Wang, H.: Unposed 3dgs recon- struction with probabilistic procrustes mapping. arXiv preprint arXiv:2507.18541 (2025)
-
[5]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Cheng, C., Yu, S., Wang, Z., Zhou, Y., Wang, H.: Outdoor monocular slam with global scale-consistent 3d gaussian pointmaps. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 26035–26044 (2025)
2025
-
[6]
arXiv preprint arXiv:2412.11530 (2024)
Cheng, J., Cai, Z., Zhang, Z., Yin, W., Muller, M., Paulitsch, M., Yang, X.: Romeo: Robust metric visual odometry. arXiv preprint arXiv:2412.11530 (2024)
-
[7]
Deng, K., Ti, Z., Xu, J., Yang, J., Xie, J.: Vggt-long: Chunk it, loop it, align it–pushing vggt’s limits on kilometer-scale long rgb sequences. arXiv preprint arXiv:2507.16443 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[8]
In: Proceedings of the SIGGRAPH Asia 2025 Conference Papers
Deng, K., Zhang, Y., Yang, J., Xie, J.: Gigaslam: Large-scale monocular slam with hierarchical gaussian splats. In: Proceedings of the SIGGRAPH Asia 2025 Conference Papers. pp. 1–10 (2025)
2025
-
[9]
arXiv preprint arXiv:2505.18992 (2025)
Deng, T., Wu, W., He, J., Pan, Y., Jiang, X., Yuan, S., Wang, D., Wang, H., Chen, W.: Vpgs-slam: Voxel-based progressive 3d gaussian slam in large-scale scenes. arXiv preprint arXiv:2505.18992 (2025)
-
[10]
In: European conference on computer vision
Engel, J., Schöps, T., Cremers, D.: Lsd-slam: Large-scale direct monocular slam. In: European conference on computer vision. pp. 834–849. Springer (2014)
2014
-
[11]
IEEE Transactions on robotics28(5), 1188–1197 (2012)
Gálvez-López, D., Tardos, J.D.: Bags of binary words for fast place recognition in image sequences. IEEE Transactions on robotics28(5), 1188–1197 (2012)
2012
-
[12]
The international journal of robotics research32(11), 1231–1237 (2013)
Geiger, A., Lenz, P., Stiller, C., Urtasun, R.: Vision meets robotics: The kitti dataset. The international journal of robotics research32(11), 1231–1237 (2013)
2013
-
[13]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops
Homeyer, C., Begiristain, L., Schnörr, C.: DROID-Splat: Combining end-to-end SLAM with 3D gaussian splatting. In: Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops. pp. 2788–2798 (2025)
2025
-
[14]
IEEE Robotics and Automation Letters9(11), 9765–9772 (2024)
Hong, S., He, J., Zheng, X., Zheng, C.: Liv-gaussmap: Lidar-inertial-visual fusion for real-time 3d radiance field map rendering. IEEE Robotics and Automation Letters9(11), 9765–9772 (2024)
2024
-
[15]
In: European Conference on Computer Vision
Hu, J., Chen, X., Feng, B., Li, G., Yang, L., Bao, H., Zhang, G., Cui, Z.: Cg-slam: Efficient dense rgb-d slam in a consistent uncertainty-aware 3d gaussian field. In: European Conference on Computer Vision. pp. 93–112. Springer (2024)
2024
-
[16]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Findings
Hu, Y., Cheng, C., Yu, S., Guo, X., Wang, H.: Vggt4d: Mining motion cues in visual geometry transformers for 4d scene reconstruction. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Findings. pp. 414–424 (June 2026)
2026
-
[17]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Huang, H., Li, L., Cheng, H., Yeung, S.K.: Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 21584–21593 (2024) KiloGS-SLAM 27
2024
-
[18]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition
Keetha, N., Karhade, J., Jatavallabhula, K.M., Yang, G., Scherer, S., Ramanan, D., Luiten, J.: Splatam: Splat track & map 3d gaussians for dense rgb-d slam. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition. pp. 21357–21366 (2024)
2024
-
[19]
ACM Trans
Kerbl, B., Kopanas, G., Leimkühler, T., Drettakis, G., et al.: 3d gaussian splatting for real-time radiance field rendering. ACM Trans. Graph.42(4), 139:1–139:14 (2023)
2023
-
[20]
International journal of computer vision81(2), 155–166 (2009)
Lepetit, V., Moreno-Noguer, F., Fua, P.: EPnP: An accurateO(n)solution to the PnP problem. International journal of computer vision81(2), 155–166 (2009)
2009
-
[21]
In: European conference on computer vision
Leroy, V., Cabon, Y., Revaud, J.: Grounding image matching in 3d with mast3r. In: European conference on computer vision. pp. 71–91. Springer (2024)
2024
-
[22]
IEEE Transactions on Pattern Analysis and Machine Intelligence45(3), 3292–3310 (2022)
Liao, Y., Xie, J., Geiger, A.: Kitti-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d. IEEE Transactions on Pattern Analysis and Machine Intelligence45(3), 3292–3310 (2022)
2022
-
[23]
In: European Conference on Computer Vision
Lipson, L., Teed, Z., Deng, J.: Deep patch visual slam. In: European Conference on Computer Vision. pp. 424–440. Springer (2024)
2024
-
[24]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Lu, T., Yu, M., Xu, L., Xiangli, Y., Wang, L., Lin, D., Dai, B.: Scaffold-gs: Struc- tured 3d gaussians for view-adaptive rendering. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 20654–20664 (2024)
2024
-
[25]
VGGT-SLAM: Dense RGB SLAM Optimized on the SL(4) Manifold
Maggio, D., Lim, H., Carlone, L.: Vggt-slam: Dense rgb slam optimized on the sl (4) manifold. arXiv preprint arXiv:2505.12549 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[26]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition
Matsuki, H., Murai, R., Kelly, P.H., Davison, A.J.: Gaussian splatting slam. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition. pp. 18039–18048 (2024)
2024
-
[27]
ACM Transactions on Graphics (TOG)44(4), 1–14 (2025)
Meuleman, A., Shah, I., Lanvin, A., Kerbl, B., Drettakis, G.: On-the-fly reconstruc- tion for large-scale novel view synthesis from unposed images. ACM Transactions on Graphics (TOG)44(4), 1–14 (2025)
2025
-
[28]
IEEE transactions on robotics33(5), 1255–1262 (2017)
Mur-Artal, R., Tardós, J.D.: Orb-slam2: An open-source slam system for monoc- ular, stereo, and rgb-d cameras. IEEE transactions on robotics33(5), 1255–1262 (2017)
2017
-
[29]
In: Proceedings of the Computer Vision and Pattern Recognition Conference
Murai, R., Dexheimer, E., Davison, A.J.: Mast3r-slam: Real-time dense slam with 3d reconstruction priors. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 16695–16705 (2025)
2025
-
[30]
IEEE trans- actions on pattern analysis and machine intelligence26(6), 756–770 (2004)
Nistér, D.: An efficient solution to the five-point relative pose problem. IEEE trans- actions on pattern analysis and machine intelligence26(6), 756–770 (2004)
2004
-
[31]
IEEE Transactions on Pattern Analysis and Machine Intelligence (2025)
Piccinelli, L., Sakaridis, C., Yang, Y.H., Segu, M., Li, S., Abbeloos, W., Van Gool, L.: Unidepthv2: Universal monocular metric depth estimation made simpler. IEEE Transactions on Pattern Analysis and Machine Intelligence (2025)
2025
-
[32]
Springer (2006)
Rajamani, R.: Vehicle dynamics and control. Springer (2006)
2006
-
[33]
In: International Conference on Learning Representations
Ravi, N., Gabeur, V., Hu, Y.T., Hu, R., Ryali, C., Ma, T., Khedr, H., Rädle, R., Rolland, C., Gustafson, L., et al.: Sam 2: Segment anything in images and videos. In: International Conference on Learning Representations. vol. 2025, pp. 28085–28128 (2025)
2025
-
[34]
arXiv preprint arXiv:2511.04283 (2025)
Ren, S., Wen, T., Fang, Y., Lu, B.: Fastgs: Training 3d gaussian splatting in 100 seconds. arXiv preprint arXiv:2511.04283 (2025)
-
[35]
In: Proceedings of the Computer Vision and Pattern Recognition Conference
Sandström,E.,Zhang,G.,Tateno,K.,Oechsle,M.,Niemeyer,M.,Zhang,Y.,Patel, M., Van Gool, L., Oswald, M., Tombari, F.: Splat-slam: Globally optimized rgb- only slam with 3d gaussians. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 1680–1691 (2025) 28 S. Yu et al
2025
-
[36]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Patnaik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine, B., et al.: Scalability in perception for autonomous driving: Waymo open dataset. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 2446–2454 (2020)
2020
-
[37]
Advances in neural information processing systems34, 16558–16569 (2021)
Teed, Z., Deng, J.: Droid-slam: Deep visual slam for monocular, stereo, and rgb- d cameras. Advances in neural information processing systems34, 16558–16569 (2021)
2021
-
[38]
Advances in Neural Information Processing Systems36, 39033–39051 (2023)
Teed, Z., Lipson, L., Deng, J.: Deep patch visual odometry. Advances in Neural Information Processing Systems36, 39033–39051 (2023)
2023
-
[39]
Advances in neural information processing systems33, 14254–14265 (2020)
Tyszkiewicz, M., Fua, P., Trulls, E.: Disk: Learning local features with policy gra- dient. Advances in neural information processing systems33, 14254–14265 (2020)
2020
-
[40]
In: Proceedings of the Computer Vision and Pattern Recognition Conference
Wang, J., Chen, M., Karaev, N., Vedaldi, A., Rupprecht, C., Novotny, D.: Vggt: Visual geometry grounded transformer. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 5294–5306 (2025)
2025
-
[41]
arXiv preprint arXiv:2602.04251 (2026)
Wang, L., Gong, R., Han, Y., Yang, L., Yang, L., Li, Y., Xu, B., Liu, H., Fu, R.: Towards next-generation slam: A survey on 3dgs-slam focusing on performance, robustness, and future directions. arXiv preprint arXiv:2602.04251 (2026)
-
[42]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Wang, S., Leroy, V., Cabon, Y., Chidlovskii, B., Revaud, J.: Dust3r: Geometric 3d vision made easy. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 20697–20709 (2024)
2024
-
[43]
Wu, C., Duan, Y., Zhang, X., Sheng, Y., Ji, J., Zhang, Y.: Mm-gaussian: 3d gaussian-based multi-modal fusion for localization and reconstruction in un- boundedscenes.In:2024IEEE/RSJInternationalConferenceonIntelligentRobots and Systems (IROS). pp. 12287–12293. IEEE (2024)
2024
-
[44]
IEEE Transactions on Robotics (2025)
Wu, K., Zhang, Z., Tie, M., Ai, Z., Gan, Z., Ding, W.: Vings-mono: Visual-inertial gaussian splatting monocular slam in large scenes. IEEE Transactions on Robotics (2025)
2025
-
[45]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Yan, C., Qu, D., Xu, D., Zhao, B., Wang, Z., Wang, D., Li, X.: Gs-slam: Dense vi- sual slam with 3d gaussian splatting. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 19595–19604 (2024)
2024
-
[46]
In: 2025 IEEE International Conference on Robotics and Automation (ICRA)
Yu, S., Cheng, C., Zhou, Y., Yang, X., Wang, H.: Rgb-only gaussian splatting slam for unbounded outdoor scenes. In: 2025 IEEE International Conference on Robotics and Automation (ICRA). pp. 11068–11074. IEEE (2025)
2025
-
[47]
Gaussian-slam: Photo-realistic dense slam with gaussian splatting,
Yugay, V., Li, Y., Gevers, T., Oswald, M.R.: Gaussian-slam: Photo-realistic dense slam with gaussian splatting. arXiv preprint arXiv:2312.10070 (2023)
- [48]
-
[49]
Zhao, B., Yu, S., Yin, Z., Shen, D., Wang, H.: Mmgs:10×compressed 3dgs throughoptimaltransportaggregationbasedonmulti-viewranking.arXivpreprint arXiv:2605.19304 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[50]
3D Skew Gaussian Splatting with Any Camera Trajectory Visualization Engine
Zhao, B., Zhou, Y., Song, G., Yin, Z., Wang, H.: 3d skew gaussian splatting with any camera trajectory visualization engine. arXiv preprint arXiv:2605.18334 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[51]
In: Proceedings of the 33rd ACM International Conference on Multimedia
Zhao, B., Zhou, Y., Yu, S., Wang, Z., Wang, H.: Wavelet-gs: 3d gaussian splat- ting with wavelet decomposition. In: Proceedings of the 33rd ACM International Conference on Multimedia. pp. 8616–8625 (2025)
2025
-
[52]
IEEE Robotics and Automation Letters9(11), 9486–9493 (2024)
Zhu, P., Zhuang, Y., Chen, B., Li, L., Wu, C., Liu, Z.: Mgs-slam: Monocular sparse tracking and gaussian mapping with depth smooth regularization. IEEE Robotics and Automation Letters9(11), 9486–9493 (2024)
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.