Support-Safe Variational Hybrid Filtering for Contact-Mode and Sparse-Law Recovery
Pith reviewed 2026-05-20 21:14 UTC · model grok-4.3
The pith
Support-safe mixing of proposals with feasible laws prevents variational hybrid filters from losing contact branches and enables sparse port-Hamiltonian recovery per coherent regime.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
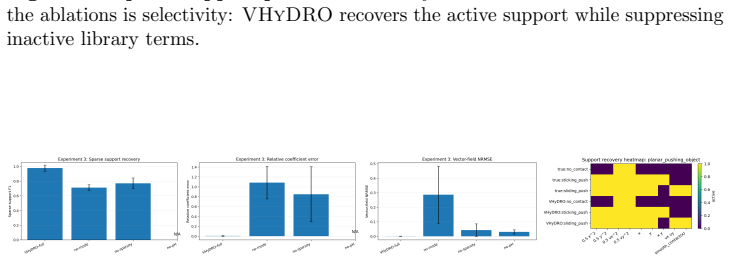
Three guarantees connect: support coverage from the mixing step stabilizes filtering, the stabilized filter concentrates the discrete contact posterior on coherent regimes, and mode-pure segments admit sparse port-Hamiltonian recovery. The recovery error separates cleanly into filtering, derivative, mode-impurity, and physics-residual parts. Three empirical findings track the same mechanism on occluded data, ManiSkill demonstrations, Sawyer and BridgeData tasks, and hybrid systems with known equations.
What carries the argument
VHYDRO, the variational hybrid dynamics learner that mixes the learned proposal with a feasible transition law before sampling and importance weighting to maintain support coverage.
If this is right
- Under heavy occlusion the support-safe filter remains usable while a non-defensive proposal collapses.
- On demonstration data the inferred discrete states form temporally coherent contact-regime segments.
- Mode-conditioned sparse fits recover the active physical terms on hybrid systems whose equations are known.
- The recovered segments produce stronger joint scores on adjusted rand index, change-point F1, and segment purity than post-hoc or mode-free baselines.
Where Pith is reading between the lines
- The same mixing principle could be tested on hybrid models outside robotics, such as piecewise-linear mechanical systems or switched electrical circuits.
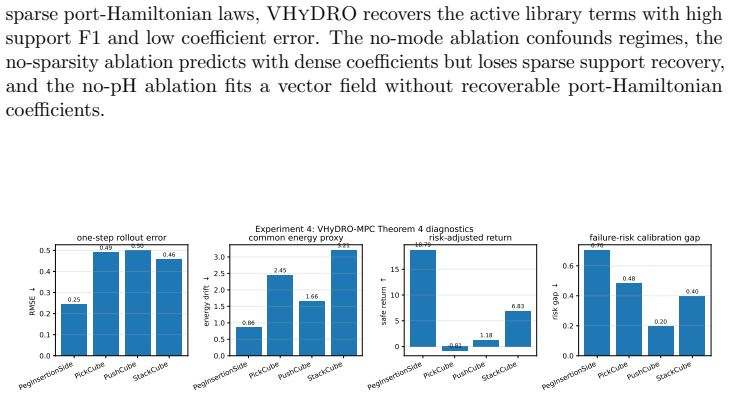
- If the concentration guarantee holds, the method may supply reliable mode labels for downstream model-predictive control that must switch between different contact laws.
- An extension could replace the port-Hamiltonian sparsity penalty with other structured priors while retaining the support-coverage argument.
Load-bearing premise
Mixing the learned proposal with a feasible transition law before sampling and importance weighting guarantees that every transition retained by the model-feasible carrier remains covered and preserves the variational properties needed for concentration and sparse recovery.
What would settle it
Run the filter on a known hybrid system under heavy occlusion with and without the mixing step; if the non-mixed version permanently drops a feasible contact branch while the mixed version recovers both the mode sequence and the sparse physical terms, the mechanism is confirmed.
Figures











read the original abstract
Contact-rich robot dynamics are hybrid: a single observation can match several latent states and contact regimes (free, impact, stick--slip). A standard amortized filter that places no probability on a feasible contact transition will permanently lose the branch the robot actually follows. We introduce VHYDRO, a variational hybrid dynamics learner that prevents this branch loss. At each step, VHYDRO mixes the learned proposal with a feasible transition law before sampling and importance weighting, ensuring that every transition retained by the model-feasible carrier remains covered. VHYDRO jointly infers a continuous latent state and a discrete contact mode, and fits a sparse port-Hamiltonian law to each recovered regime. On top of this, three guarantees connect: support coverage stabilizes filtering, the stabilized filter concentrates the discrete contact posterior on coherent regimes, and mode-pure segments admit sparse port-Hamiltonian recovery. The recovery error separates cleanly into filtering, derivative, mode-impurity, and physics-residual parts. Three empirical findings track the same mechanism. Under heavy occlusion the support-safe filter stays usable while a non-defensive proposal collapses. On ManiSkill demonstrations and on four Sawyer/BridgeData task families the discrete state forms temporally coherent contact-regime segments that the discrete state yields a stronger joint profile across ARI, change-point F1, and segment purity than post-hoc and mode-free baselines. On hybrid systems with known equations the mode-conditioned sparse fit recovers the active physical terms; purely predictive baselines do not.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces VHYDRO, a variational hybrid dynamics learner for contact-rich robot systems. It mixes a learned proposal with a feasible transition law at each step before sampling and importance weighting to ensure support coverage and prevent permanent loss of feasible contact branches. The method jointly infers continuous latent states and discrete contact modes, then fits sparse port-Hamiltonian laws to recovered regimes. Three guarantees are asserted: support coverage stabilizes filtering, the stabilized filter concentrates the discrete posterior on coherent regimes, and mode-pure segments enable sparse recovery. Recovery error decomposes into filtering, derivative, mode-impurity, and physics-residual terms. Empirical results on ManiSkill demonstrations and Sawyer/BridgeData tasks show improved temporal coherence (via ARI, change-point F1, segment purity) under occlusion compared to non-defensive and post-hoc baselines.
Significance. If the support-coverage mechanism and the three chained guarantees hold with the claimed clean error separation, the work would provide a principled defense against branch loss in hybrid filtering and enable more reliable sparse physics recovery from mode-pure segments. This could meaningfully advance robust contact-mode identification and hybrid system learning in robotics, particularly for tasks with heavy occlusion or sparse demonstrations.
major comments (3)
- [Abstract] Abstract (paragraph on VHYDRO definition): The central mixing step—combining the learned proposal with a feasible transition law before sampling and importance weighting—is described only at a high level. No explicit equations define the mixing coefficient, the resulting importance weights, or how the procedure preserves unbiasedness or variational consistency with respect to the true hybrid posterior. This mixing is load-bearing for the support-coverage stabilization guarantee and for preventing mode-impurity leakage into the recovery error decomposition.
- [Abstract] Abstract: The three guarantees (support coverage stabilizes filtering; stabilized filter concentrates discrete posterior; mode-pure segments admit sparse port-Hamiltonian recovery) and the clean four-part error decomposition are asserted without derivations, proof sketches, or explicit equations showing how the mixing step yields the claimed concentration or separation. These assertions are central to the paper's contribution but remain unverifiable from the text.
- [Abstract] Abstract: The claim that the discrete state yields stronger joint profiles across ARI, change-point F1, and segment purity than post-hoc and mode-free baselines is presented without quantitative tables or statistical details in the provided text, making it difficult to assess the magnitude and robustness of the empirical support for the concentration guarantee.
minor comments (1)
- [Abstract] The abstract refers to 'model-feasible carrier' and 'VHYDRO' without a prior definition or acronym expansion; a brief inline definition on first use would improve readability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We address each major comment below and indicate the revisions we will make to strengthen the clarity of the abstract while preserving the manuscript's technical content.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on VHYDRO definition): The central mixing step—combining the learned proposal with a feasible transition law before sampling and importance weighting—is described only at a high level. No explicit equations define the mixing coefficient, the resulting importance weights, or how the procedure preserves unbiasedness or variational consistency with respect to the true hybrid posterior. This mixing is load-bearing for the support-coverage stabilization guarantee and for preventing mode-impurity leakage into the recovery error decomposition.
Authors: We agree that the abstract presents the mixing at a high level. The explicit definition of the mixing coefficient, the resulting importance weights, and the proof that the procedure preserves unbiasedness and variational consistency appear in Section 3.2 and Appendix B of the full manuscript. We will revise the abstract to include a compact equation for the mixed proposal and a brief statement on support preservation. revision: yes
-
Referee: [Abstract] Abstract: The three guarantees (support coverage stabilizes filtering; stabilized filter concentrates discrete posterior; mode-pure segments admit sparse port-Hamiltonian recovery) and the clean four-part error decomposition are asserted without derivations, proof sketches, or explicit equations showing how the mixing step yields the claimed concentration or separation. These assertions are central to the paper's contribution but remain unverifiable from the text.
Authors: The three guarantees and the four-part error decomposition are derived in Section 4 (Theorems 1–2 and Equation 12). We will revise the abstract to add a short parenthetical reference to these results and a one-sentence indication of how the mixing step produces the separation. revision: partial
-
Referee: [Abstract] Abstract: The claim that the discrete state yields stronger joint profiles across ARI, change-point F1, and segment purity than post-hoc and mode-free baselines is presented without quantitative tables or statistical details in the provided text, making it difficult to assess the magnitude and robustness of the empirical support for the concentration guarantee.
Authors: The quantitative results with means, standard deviations, and statistical tests are reported in Table 2 and Figure 4 of the full manuscript. We will update the abstract to include the key numerical improvements and a direct reference to the table. revision: yes
Circularity Check
No circularity: guarantees presented as following from support-coverage mechanism without reduction to inputs
full rationale
The abstract defines VHYDRO via mixing of learned proposal with feasible transition law to ensure coverage, then states that three guarantees connect from this mechanism (stabilization of filtering, concentration on coherent regimes, sparse port-Hamiltonian recovery). No equations, fitted-parameter renamings, or self-citations appear that would make any guarantee equivalent to its inputs by construction. The error decomposition into filtering/derivative/mode-impurity/physics-residual parts is presented as a consequence of the mode-pure segments rather than a tautology. The derivation chain remains self-contained against the described mechanism.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Variational inference can approximate the joint posterior over continuous state and discrete mode
invented entities (1)
-
VHYDRO
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
VHyDRO mixes the learned proposal with a feasible transition law before sampling and importance weighting... Theorem 1 (Support-safe budgeted IW/FIVO increment)... Theorem 3 (Filtering- and mode-robust sparse port-Hamiltonian recovery)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Advances in neural information processing systems , volume=
Embed to control: A locally linear latent dynamics model for control from raw images , author=. Advances in neural information processing systems , volume=
-
[2]
World models , author=. arXiv preprint arXiv:1803.10122 , volume=
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
International conference on machine learning , pages=
Learning latent dynamics for planning from pixels , author=. International conference on machine learning , pages=. 2019 , organization=
work page 2019
-
[4]
Mastering diverse control tasks through world models , author=. Nature , volume=. 2025 , publisher=
work page 2025
-
[5]
TD-MPC2: Scalable, Robust World Models for Continuous Control
Td-mpc2: Scalable, robust world models for continuous control , author=. arXiv preprint arXiv:2310.16828 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Proceedings of the 28th International Conference on machine learning (ICML-11) , pages=
PILCO: A model-based and data-efficient approach to policy search , author=. Proceedings of the 28th International Conference on machine learning (ICML-11) , pages=
-
[7]
Advances in neural information processing systems , volume=
Deep reinforcement learning in a handful of trials using probabilistic dynamics models , author=. Advances in neural information processing systems , volume=
-
[8]
Advances in neural information processing systems , volume=
A recurrent latent variable model for sequential data , author=. Advances in neural information processing systems , volume=
-
[9]
Deep kalman filters , author=. arXiv preprint arXiv:1511.05121 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
International conference on machine learning , pages=
Probabilistic recurrent state-space models , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[11]
Advances in neural information processing systems , volume=
Filtering variational objectives , author=. Advances in neural information processing systems , volume=
-
[12]
International conference on artificial intelligence and statistics , pages=
Variational sequential monte carlo , author=. International conference on artificial intelligence and statistics , pages=. 2018 , organization=
work page 2018
-
[13]
Sequential Monte Carlo methods in practice , pages=
An introduction to sequential Monte Carlo methods , author=. Sequential Monte Carlo methods in practice , pages=. 2001 , publisher=
work page 2001
-
[14]
Journal of the Royal Statistical Society Series B: Statistical Methodology , volume=
Particle markov chain monte carlo methods , author=. Journal of the Royal Statistical Society Series B: Statistical Methodology , volume=. 2010 , publisher=
work page 2010
-
[15]
Weighted average importance sampling and defensive mixture distributions , author=. Technometrics , volume=. 1995 , publisher=
work page 1995
-
[16]
Proceedings of the national academy of sciences , volume=
Discovering governing equations from data by sparse identification of nonlinear dynamical systems , author=. Proceedings of the national academy of sciences , volume=. 2016 , publisher=
work page 2016
-
[17]
Sparse identification of nonlinear dynamics with control (SINDYc) , author=. IFAC-PapersOnLine , volume=. 2016 , publisher=
work page 2016
-
[18]
Data-driven discovery of partial differential equations , author=. Science advances , volume=. 2017 , publisher=
work page 2017
-
[19]
Distilling free-form natural laws from experimental data , author=. science , volume=. 2009 , publisher=
work page 2009
-
[20]
Proceedings of the National Academy of Sciences , volume=
Data-driven discovery of coordinates and governing equations , author=. Proceedings of the National Academy of Sciences , volume=. 2019 , publisher=
work page 2019
-
[21]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
Rapid Bayesian identification of sparse nonlinear dynamics from scarce and noisy data , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2025 , publisher=
work page 2025
-
[22]
Computer Methods in Applied Mechanics and Engineering , volume=
EKF--SINDy: Empowering the extended Kalman filter with sparse identification of nonlinear dynamics , author=. Computer Methods in Applied Mechanics and Engineering , volume=. 2024 , publisher=
work page 2024
-
[23]
VENI, VINDy, VICI: a generative reduced-order modeling framework with uncertainty quantification , author=. Neural Networks , pages=. 2026 , publisher=
work page 2026
-
[24]
Advances in neural information processing systems , volume=
Neural ordinary differential equations , author=. Advances in neural information processing systems , volume=
-
[25]
Journal of Computational physics , volume=
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations , author=. Journal of Computational physics , volume=. 2019 , publisher=
work page 2019
-
[26]
Advances in neural information processing systems , volume=
Hamiltonian neural networks , author=. Advances in neural information processing systems , volume=
-
[27]
arXiv preprint arXiv:2003.04630 , year=
Lagrangian neural networks , author=. arXiv preprint arXiv:2003.04630 , year=
-
[28]
Deep Lagrangian Networks: Using Physics as Model Prior for Deep Learning
Deep lagrangian networks: Using physics as model prior for deep learning , author=. arXiv preprint arXiv:1907.04490 , year=
work page internal anchor Pith review Pith/arXiv arXiv 1907
-
[29]
Port-Hamiltonian neural networks for learning explicit time-dependent dynamical systems , author=. Physical Review E , volume=. 2021 , publisher=
work page 2021
-
[30]
Computational Science and Engineering , volume=
Data-driven identification of latent port-Hamiltonian systems , author=. Computational Science and Engineering , volume=. 2025 , publisher=
work page 2025
-
[31]
Artificial intelligence and statistics , pages=
Bayesian learning and inference in recurrent switching linear dynamical systems , author=. Artificial intelligence and statistics , pages=. 2017 , organization=
work page 2017
-
[32]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
Model selection for hybrid dynamical systems via sparse regression , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2019 , publisher=
work page 2019
-
[33]
Conference on Robot Learning , pages=
Contactnets: Learning discontinuous contact dynamics with smooth, implicit representations , author=. Conference on Robot Learning , pages=. 2021 , organization=
work page 2021
-
[34]
International Conference on Artificial Intelligence and Statistics , pages=
Learning contact dynamics using physically structured neural networks , author=. International Conference on Artificial Intelligence and Statistics , pages=. 2021 , organization=
work page 2021
-
[35]
International conference on machine learning , pages=
Graph networks as learnable physics engines for inference and control , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[36]
Machine Learning: Science and Technology , volume=
Discovering symbolic laws directly from trajectories with hamiltonian graph neural networks , author=. Machine Learning: Science and Technology , volume=. 2024 , publisher=
work page 2024
-
[37]
Conference on Robot Learning , pages=
Roboturk: A crowdsourcing platform for robotic skill learning through imitation , author=. Conference on Robot Learning , pages=. 2018 , organization=
work page 2018
-
[38]
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
What matters in learning from offline human demonstrations for robot manipulation , author=. arXiv preprint arXiv:2108.03298 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[39]
Conference on Robot Learning , pages=
Bridgedata v2: A dataset for robot learning at scale , author=. Conference on Robot Learning , pages=. 2023 , organization=
work page 2023
-
[40]
Maniskill2: A unified benchmark for generalizable manipulation skills,
Maniskill2: A unified benchmark for generalizable manipulation skills , author=. arXiv preprint arXiv:2302.04659 , year=
-
[41]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Sapien: A simulated part-based interactive environment , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[42]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Partnet: A large-scale benchmark for fine-grained and hierarchical part-level 3d object understanding , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[43]
Deep Variational Bayes Filters: Unsupervised Learning of State Space Models from Raw Data
Deep variational bayes filters: Unsupervised learning of state space models from raw data , author=. arXiv preprint arXiv:1605.06432 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[44]
Dream to Control: Learning Behaviors by Latent Imagination
Dream to control: Learning behaviors by latent imagination , author=. arXiv preprint arXiv:1912.01603 , year=
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[45]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
Bayesian autoencoders for data-driven discovery of coordinates, governing equations and fundamental constants , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2024 , publisher=
work page 2024
-
[46]
arXiv preprint arXiv:2405.20905 , year=
Veni, vindy, vici: a variational reduced-order modeling framework with uncertainty quantification , author=. arXiv preprint arXiv:2405.20905 , year=
-
[47]
The Annals of Applied Statistics , pages=
A sticky HDP-HMM with application to speaker diarization , author=. The Annals of Applied Statistics , pages=. 2011 , publisher=
work page 2011
-
[48]
International Journal for Numerical Methods in Engineering , volume=
An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and coulomb friction , author=. International Journal for Numerical Methods in Engineering , volume=. 1996 , publisher=
work page 1996
-
[49]
Virtual Constraints and Hybrid Zero Dynamics for Realizing Underactuated Bipedal Locomotion
Virtual constraints and hybrid zero dynamics for realizing underactuated bipedal locomotion , author=. arXiv preprint arXiv:1706.01127 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[50]
Impact-invariant control: Maximizing control authority during impacts , author=. Autonomous Robots , volume=. 2025 , publisher=
work page 2025
-
[51]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
SINDy-PI: a robust algorithm for parallel implicit sparse identification of nonlinear dynamics , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2020 , publisher=
work page 2020
-
[52]
Advances in neural information processing systems , volume=
Interaction networks for learning about objects, relations and physics , author=. Advances in neural information processing systems , volume=
-
[53]
International conference on machine learning , pages=
Neural relational inference for interacting systems , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[54]
International conference on machine learning , pages=
Learning to simulate complex physics with graph networks , author=. International conference on machine learning , pages=. 2020 , organization=
work page 2020
-
[55]
Conference on Robot Learning , pages=
Bayesian object models for robotic interaction with differentiable probabilistic programming , author=. Conference on Robot Learning , pages=. 2023 , organization=
work page 2023
-
[56]
International conference on machine learning , pages=
On calibration of modern neural networks , author=. International conference on machine learning , pages=. 2017 , organization=
work page 2017
-
[57]
International conference on machine learning , pages=
Accurate uncertainties for deep learning using calibrated regression , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[58]
International Conference on Machine Learning , pages=
Calibrated model-based deep reinforcement learning , author=. International Conference on Machine Learning , pages=. 2019 , organization=
work page 2019
-
[59]
Advances in Neural Information Processing Systems , volume=
Sixo: Smoothing inference with twisted objectives , author=. Advances in Neural Information Processing Systems , volume=
-
[60]
Learning switching port-Hamiltonian systems with uncertainty quantification , author=. IFAC-PapersOnLine , volume=. 2023 , publisher=
work page 2023
-
[61]
Simultaneous analysis of Lasso and Dantzig selector , author=
-
[62]
Conference on Learning Theory , pages=
Reconstruction from anisotropic random measurements , author=. Conference on Learning Theory , pages=. 2012 , organization=
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.