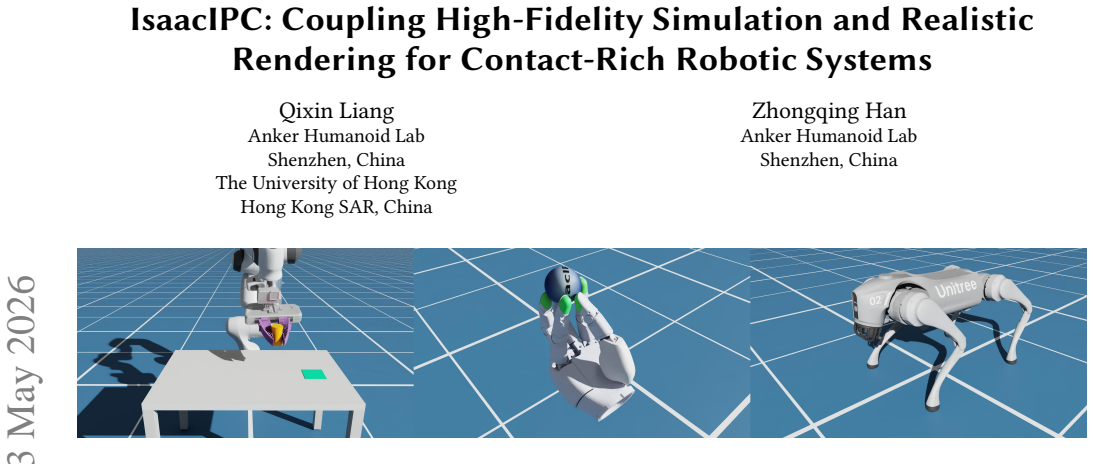
IsaacIPC: Coupling High-Fidelity Simulation and Realistic Rendering for Contact-Rich Robotic Systems
Pith reviewed 2026-06-30 13:36 UTC · model grok-4.3
The pith
IsaacIPC couples incremental potential contact simulation to IsaacSim by mapping deformations between simulation and visual meshes for real-time rendering.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
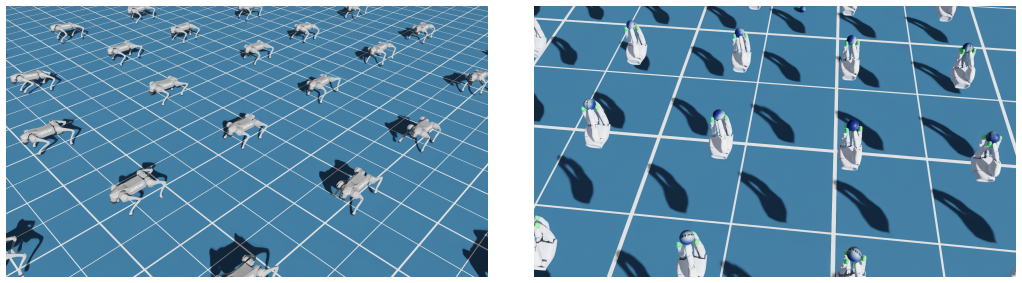
IsaacIPC maps simulated deformation between simulation and visual meshes, enabling real-time realistic rendering with applications to data collection and policy evaluation. For tactile sensing, the geometric mortar contact potential defines a barrier potential over contact samples on tactile surfaces to better resolve contact-pressure distributions.
What carries the argument
Deformation mapping between IPC simulation meshes and visual meshes, plus the geometric mortar contact potential (GMCP) that places a barrier over contact samples on tactile surfaces.
If this is right
- Real-time rendering becomes available for contact-rich scenes such as quadruped locomotion and dexterous manipulation.
- Contact-pressure data from GMCP can be used directly to train tactile-based policies.
- The same mapping pipeline applies to any rigid-deformable robotic setup inside IsaacSim.
- Benchmarks confirm that GMCP improves resolution of pressure distributions compared with prior contact models.
Where Pith is reading between the lines
- The mapping approach could be reused with other high-fidelity simulators beyond IPC to improve visual fidelity in reinforcement-learning pipelines.
- GMCP's sample-based barrier might be generalized to non-tactile contact problems where pressure distribution matters for stability analysis.
- If the mapping holds under large deformations, it would reduce the need for separate visual and physics meshes in many manipulation benchmarks.
Load-bearing premise
The deformation mapping between IPC simulation meshes and visual meshes preserves enough contact accuracy and pressure fidelity for the intended uses in policy evaluation and data collection.
What would settle it
A side-by-side test in which a policy trained or evaluated inside IsaacIPC shows markedly lower success rates on physical hardware than the same policy evaluated inside a standard non-mapped simulator.
Figures

read the original abstract
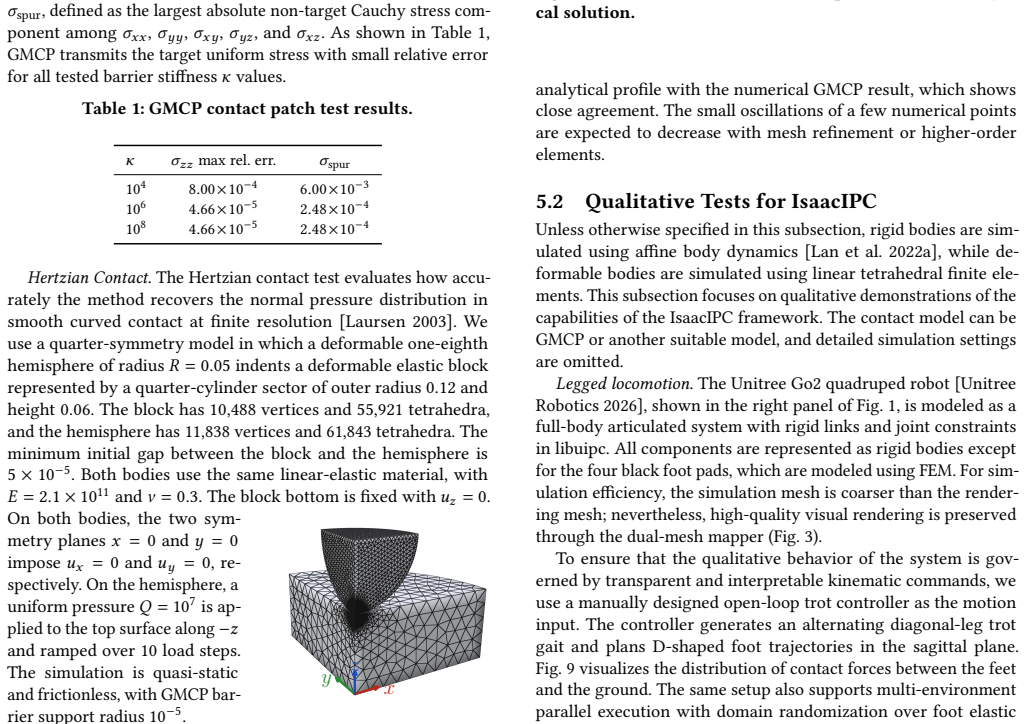
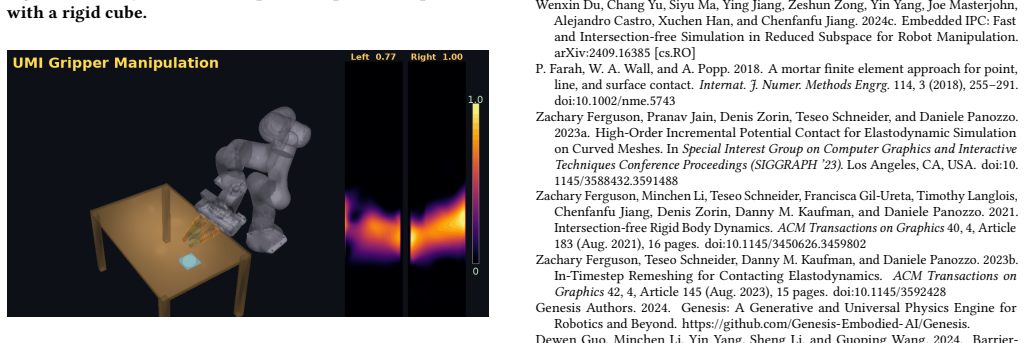
We present IsaacIPC, a robotic simulation framework that couples GPU accelerated incremental potential contact (IPC) with IsaacSim/Lab. IsaacIPC maps simulated deformation between simulation and visual meshes, enabling real-time realistic rendering with applications to data collection and policy evaluation. For tactile sensing, we introduce the geometric mortar contact potential (GMCP), which defines a barrier potential over contact samples on tactile surfaces to better resolve contact-pressure distributions. We evaluate GMCP on contact benchmarks and demonstrate IsaacIPC on rigid-deformable robotic simulations including a quadruped robot, a dexterous hand, and a universal manipulation interface (UMI) gripper.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents IsaacIPC, a robotic simulation framework coupling GPU-accelerated incremental potential contact (IPC) with IsaacSim/Lab. It introduces a deformation mapping between simulation and visual meshes to enable real-time realistic rendering, with applications to data collection and policy evaluation. For tactile sensing, it proposes the geometric mortar contact potential (GMCP), a barrier potential over contact samples on tactile surfaces. GMCP is evaluated on contact benchmarks, and IsaacIPC is demonstrated on rigid-deformable simulations including a quadruped, dexterous hand, and UMI gripper.
Significance. If the deformation mapping preserves contact accuracy and GMCP improves pressure resolution as claimed, the framework could support more realistic sim-to-real transfer and tactile data generation for contact-rich robotics. The practical integration with an existing simulator like IsaacSim is a strength for reproducibility and adoption.
major comments (2)
- [Abstract and §1] Abstract and §1: no quantitative results, error metrics, or ablation studies are reported for the deformation mapping fidelity or GMCP pressure resolution, so the central claims about enabling accurate policy evaluation and better contact distributions cannot be assessed.
- [GMCP definition] GMCP definition: the manuscript provides no equations, pseudocode, or derivation for how the barrier potential is constructed over contact samples, which is load-bearing for the tactile sensing contribution.
minor comments (1)
- Figure captions and text could clarify the exact mesh topologies used in the mapping to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments highlight opportunities to strengthen the presentation of quantitative evidence and the technical detail on GMCP. We address each major comment below and will incorporate revisions accordingly.
read point-by-point responses
-
Referee: [Abstract and §1] Abstract and §1: no quantitative results, error metrics, or ablation studies are reported for the deformation mapping fidelity or GMCP pressure resolution, so the central claims about enabling accurate policy evaluation and better contact distributions cannot be assessed.
Authors: We agree that the abstract and introduction currently emphasize the framework architecture without embedding specific error metrics or ablation numbers for deformation mapping fidelity or GMCP pressure resolution. While the manuscript reports GMCP evaluation on contact benchmarks in later sections, the absence of these quantitative details in the opening sections makes it difficult for readers to immediately assess the claims. In the revised version we will add concise quantitative results (including error metrics for mapping fidelity and pressure resolution) to both the abstract and §1, along with a brief reference to the benchmark comparisons. revision: yes
-
Referee: [GMCP definition] GMCP definition: the manuscript provides no equations, pseudocode, or derivation for how the barrier potential is constructed over contact samples, which is load-bearing for the tactile sensing contribution.
Authors: We acknowledge that the current manuscript text does not supply the explicit equations, pseudocode, or derivation for constructing the GMCP barrier potential over contact samples. This omission limits the ability to fully evaluate the tactile sensing contribution. In the revised manuscript we will insert the mathematical definition of the barrier potential, the associated pseudocode, and a short derivation in the methods section describing GMCP. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes a simulation framework (IsaacIPC) that integrates GPU-accelerated IPC with IsaacSim/Lab, including a deformation mapping between meshes and the GMCP barrier potential for tactile surfaces. No equations, fitted parameters, predictions, or self-citations are presented in the provided text that reduce by construction to the inputs. The work is a framework description with benchmark evaluations rather than a derivation chain containing self-definitional, fitted-input, or uniqueness-imported circular steps; the central claims remain independent of any internal reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Interactive Skeleton-Driven Dynamic Deformations.ACM Transactions on Graphics 21, 3 (2002), 586–593. doi:10.1145/566654.566622 Baijun Chen, Weijie Wan, Tianxing Chen, Xianda Guo, Congsheng Xu, Yuanyang Qi, Haojie Zhang, Longyan Wu, Tianling Xu, Zixuan Li, Yizhe Wu, Rui Li, Xiaokang Yang, Ping Luo, Wei Sui, and Yao Mu
-
[2]
arXiv:2602.10093 [cs.RO] Yunuo Chen, Minchen Li, Lei Lan, Hao Su, Yin Yang, and Chenfanfu Jiang
UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and Benchmarking. arXiv:2602.10093 [cs.RO] Yunuo Chen, Minchen Li, Lei Lan, Hao Su, Yin Yang, and Chenfanfu Jiang
-
[3]
A Unified Newton Barrier Method for Multibody Dynamics.ACM Transactions on Graphics41, 4, Article 66 (July 2022), 14 pages. doi:10.1145/3528223.3530076 Cheng Chi, Zhenjia Xu, Chuer Pan, Eric Cousineau, Benjamin Burchfiel, Siyuan Feng, Russ Tedrake, and Shuran Song
-
[4]
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
Universal Manipulation Interface: In-the- Wild Robot Teaching Without In-the-Wild Robots.arXiv preprint arXiv:2402.10329 (2024). Wenxin Du, Wenqiang Xu, Jieji Ren, Zhenjun Yu, and Cewu Lu. 2024a. TacIPC: Intersection- and Inversion-free FEM-based Elastomer Simulation for Optical Tactile Sensors.IEEE Robotics and Automation Letters(2024). Wenxin Du, Siqion...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[5]
A mortar finite element approach for point, line, and surface contact.Internat. J. Numer. Methods Engrg.114, 3 (2018), 255–291. doi:10.1002/nme.5743 Zachary Ferguson, Pranav Jain, Denis Zorin, Teseo Schneider, and Daniele Panozzo. 2023a. High-Order Incremental Potential Contact for Elastodynamic Simulation on Curved Meshes. InSpecial Interest Group on Com...
-
[6]
Intersection-free Rigid Body Dynamics.ACM Transactions on Graphics40, 4, Article 183 (Aug. 2021), 16 pages. doi:10.1145/3450626.3459802 Zachary Ferguson, Teseo Schneider, Danny M. Kaufman, and Daniele Panozzo. 2023b. In-Timestep Remeshing for Contacting Elastodynamics.ACM Transactions on Graphics42, 4, Article 145 (Aug. 2023), 15 pages. doi:10.1145/359242...
-
[7]
Barrier- Augmented Lagrangian for GPU-based Elastodynamic Contact.ACM Transactions on Graphics43, 6, Article 225 (Nov. 2024), 17 pages. doi:10.1145/3687988 Kemeng Huang, Floyd M. Chitalu, Huancheng Lin, and Taku Komura
-
[8]
GIPC: Fast and Stable Gauss-Newton Optimization of IPC Barrier Energy.ACM Transactions on Graphics43, 2 (Jan. 2024), 18 pages. doi:10.1145/3643028 Kemeng Huang, Xinyu Lu, Huancheng Lin, Taku Komura, and Minchen Li. 2025a. StiffGIPC: Advancing GPU IPC for Stiff Affine-Deformable Simulation.ACM Transactions on Graphics(2025). Zizhou Huang, Maxwell Paik, Zac...
-
[9]
InProceedings of the IEEE International Conference on Robotics and Automation (ICRA)
IPC- GraspSim: Reducing the Sim2Real Gap for Parallel-Jaw Grasping with the Incre- mental Potential Contact Model. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA). 6180–6187. Lei Lan, Danny M. Kaufman, Minchen Li, Chenfanfu Jiang, and Yin Yang. 2022a. Affine Body Dynamics: Fast, Stable and Intersection-free Simulation ...
-
[10]
ACM Transactions on Graphics39, 4, Article 49 (July 2020), 20 pages
Incremental Potential Contact: Intersection- and Inversion-free, Large-Deformation Dynamics. ACM Transactions on Graphics39, 4, Article 49 (July 2020), 20 pages. doi:10.1145/ 3386569.3392425 Minchen Li, Zachary Ferguson, Teseo Schneider, Timothy Langlois, Denis Zorin, Daniele Panozzo, Chenfanfu Jiang, and Danny M. Kaufman
-
[11]
Convergent Incremental Potential Contact. arXiv:2307.15908 [math.NA] Yuyang Li, Wenxin Du, Chang Yu, Puhao Li, Zihang Zhao, Tengyu Liu, Chenfanfu Jiang, Yixin Zhu, and Siyuan Huang
-
[12]
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation. arXiv:2504.12908 [cs.RO] Zeyi Li, Yushi Yang, Shawn Xie, Kyle Xu, Tianxing Chen, Yuran Wang, Zhenhao Shen, Yan Shen, Yue Chen, Wenjun Li, Yukun Zheng, Chaorui Zhang, Siyi Lin, Fei Teng, Hongjun Yang, Ming Chen, Steve Xie, and Ruihai Wu
-
[13]
LeHome: A Simulation Environment for Deformable Object Manipulation in Household Scenarios
LeHome: A Simulation Environment for Deformable Object Manipulation in Household Scenarios. arXiv:2604.22363 [cs.RO] https://arxiv.org/abs/2604.22363 Miles Macklin
work page internal anchor Pith review Pith/arXiv arXiv
-
[14]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Isaac lab: A gpu-accelerated simulation framework for multi-modal robot learning.arXiv preprint arXiv:2511.04831(2025). Duc Huy Nguyen, Tim Schneider, Guillaume Duret, Alap Kshirsagar, Boris Belousov, and Jan Peters
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[15]
In8th Conference on Robot Learning (CoRL 2024)
TacEx: GelSight Tactile Simulation in Isaac Sim – Combining Soft-Body and Visuotactile Simulators. In8th Conference on Robot Learning (CoRL 2024). Munich, Germany. NVIDIA
2024
-
[16]
https://www.nvidia.com/en-us/omniverse/
NVIDIA Omniverse. https://www.nvidia.com/en-us/omniverse/. Ac- cessed: 2026-05-22. NVIDIA Corporation
2026
-
[17]
doi:10.1016/j.cma.2003.10.010 Sharpa Robotics
A Mortar Segment-to-Segment Contact Method for Large Deformation Solid Mechanics.Computer Methods in Applied Mechanics and Engineering193, 6–8 (2004), 601–629. doi:10.1016/j.cma.2003.10.010 Sharpa Robotics
-
[18]
https://github.com/ sharpa-robotics
Sharpa Robotics GitHub Organization. https://github.com/ sharpa-robotics. Accessed: 2026-05-20. Xing Shen, Runyuan Cai, Mengxiao Bi, and Tangjie Lv
2026
-
[19]
Preconditioned Nonlinear Conjugate Gradient Method for Real-time Interior-point Hyperelasticity. InSpecial Interest Group on Computer Graphics and Interactive Techniques Conference Papers (SIGGRAPH ’24). Denver, CO, USA, 11 pages. doi:10.1145/3641519.3657490 Hang Si
-
[20]
TetGen, a Delaunay-Based Quality Tetrahedral Mesh Generator.ACM Trans. Math. Software41, 2 (2015), 11:1–11:36. doi:10.1145/2629697 spiriMirror
-
[21]
https://github.com/spiriMirror/libuipc
libuipc. https://github.com/spiriMirror/libuipc. Accessed: 2026-05-
2026
-
[22]
Reentrant polygon clipping.Commun. ACM17, 1 (Jan. 1974), 32–42. doi:10.1145/360767.360802 Tencent Hunyuan3D Team
-
[23]
Hunyuan3D 2.5: Towards High-Fidelity 3D Assets Generation with Ultimate Details
Hunyuan3D 2.5: Towards High-Fidelity 3D Assets Generation with Ultimate Details. arXiv:2506.16504 [cs.CV] https://arxiv.org/abs/ 2506.16504 Unitree Robotics
work page internal anchor Pith review Pith/arXiv arXiv
-
[24]
https://github.com/ unitreerobotics
Unitree Robotics GitHub Organization. https://github.com/ unitreerobotics. Accessed: 2026-05-20. Barbara I. Wohlmuth
2026
-
[25]
A Mortar Finite Element Method Using Dual Spaces for the Lagrange Multiplier.SIAM J. Numer. Anal.38, 3 (2000), 989–1012. doi:10.1137/ S0036142999350929 Peter Wriggers and Tod A Laursen. 2006.Computational Contact Mechanics. Vol
2000
-
[26]
arXiv:2603.28475 [cs.RO] Wenzhen Yuan, Rui Li, Mandayam A
Tac2Real: Reliable and GPU Visuotactile Simula- tion for Online Reinforcement Learning and Zero-Shot Real-World Deployment. arXiv:2603.28475 [cs.RO] Wenzhen Yuan, Rui Li, Mandayam A. Srinivasan, and Edward H. Adelson
-
[27]
An Efficient Multilevel Preconditioned Nonlinear Conjugate Gradient Method for Incremental Potential Contact. arXiv:2604.19892 [cs.GR] Juntian Zheng, Zhaofeng Luo, and Minchen Li
work page internal anchor Pith review Pith/arXiv arXiv
-
[28]
Robust and Efficient Penetration- Free Elastodynamics without Barriers.ACM Transactions on Graphics(2026). doi:10. 1145/3811035
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.