Scene-Level Heterogeneous Physics Simulation with 3D Gaussian Splats
Pith reviewed 2026-06-26 12:22 UTC · model grok-4.3
The pith
A representation abstraction framework turns 3D Gaussian splats and other assets into unified particles for scene-level physics simulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
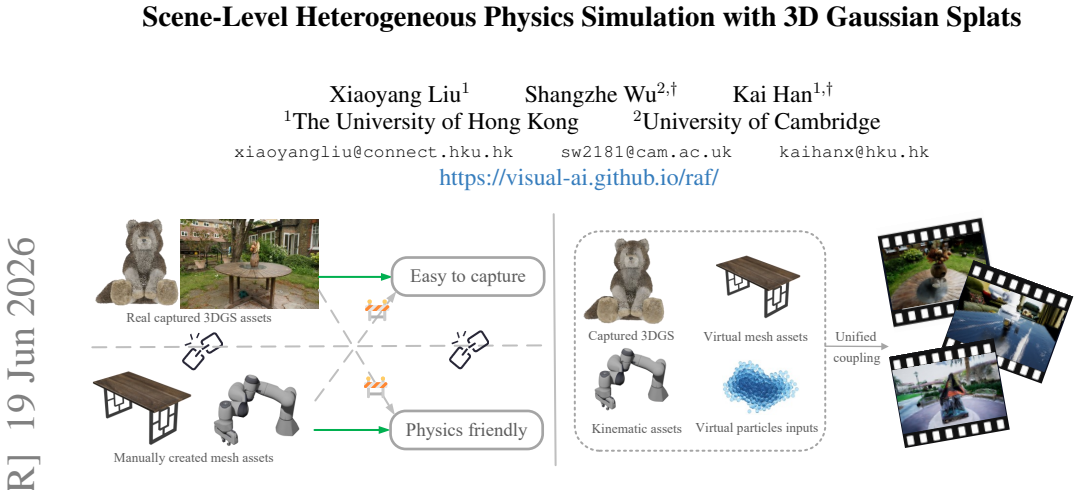
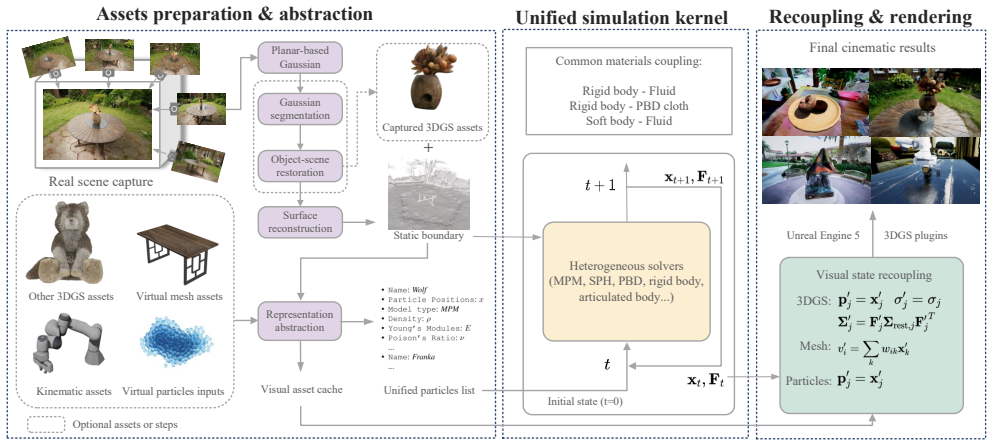
The Representation Abstraction Framework converts diverse assets including 3D Gaussian Splats, virtual meshes, and fluids into a unified physical particle set. This set, combined with static collision boundaries from scene capture, runs in a solver-agnostic physics kernel. Physical outcomes map back to drive each asset's visual reconstruction, enabling complex behaviors like non-rigid deformation of 3DGS assets in heterogeneous, scene-level simulations.
What carries the argument
The Representation Abstraction Framework, which translates all assets into a unified physical particle set that carries the physics simulation and maps results back to visuals.
If this is right
- 3DGS assets can deform non-rigidly when interacting with other objects and environments.
- Simulations can include mixtures of splats, meshes, and fluids in the same scene.
- Physics can handle large-scale captured static geometry as collision boundaries.
- Multiple solvers can be used without changing the asset representations.
Where Pith is reading between the lines
- Future work could extend this to real-time interactive applications like games or VR with photorealistic deformable objects.
- Testing with more complex fluid dynamics or rigid body interactions might reveal limits of the particle abstraction.
- The approach could apply to other implicit representations beyond 3DGS if similar mapping is possible.
Load-bearing premise
Physical results from the unified particle set can be accurately mapped back to each asset's visual reconstruction without losing physical accuracy or visual fidelity.
What would settle it
Running a simulation where a 3DGS asset collides with complex geometry and checking if the observed deformation matches expected physical behavior from the particle simulation or shows visual artifacts.
Figures
read the original abstract
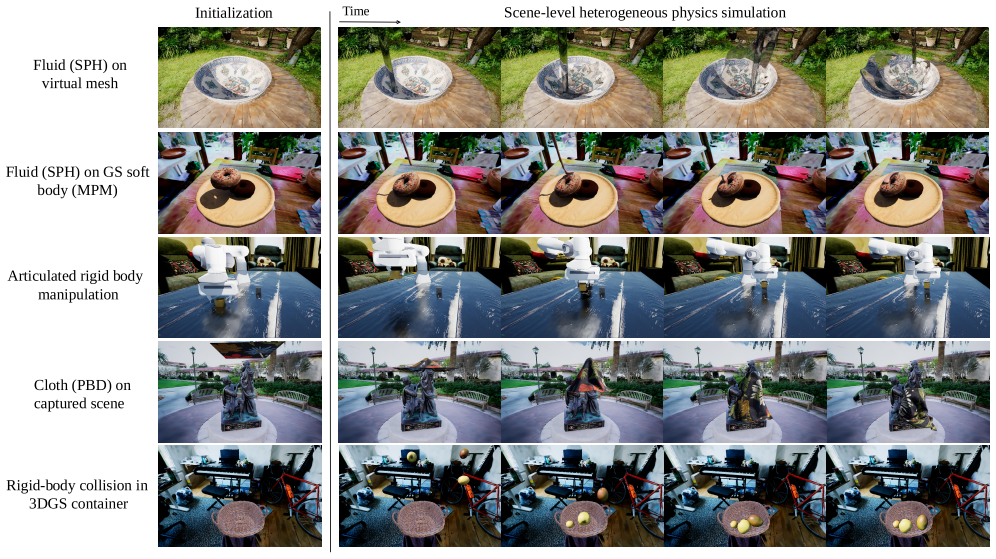
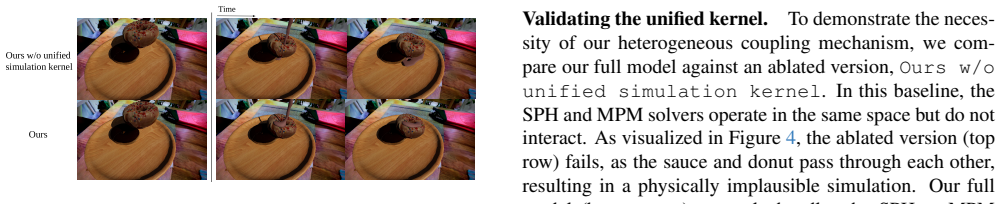
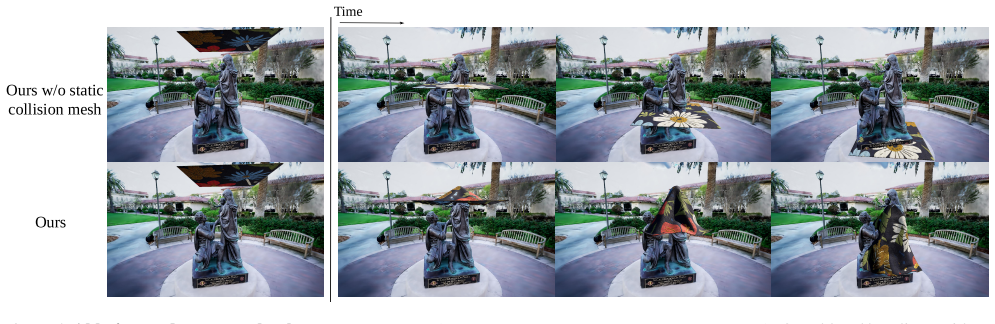
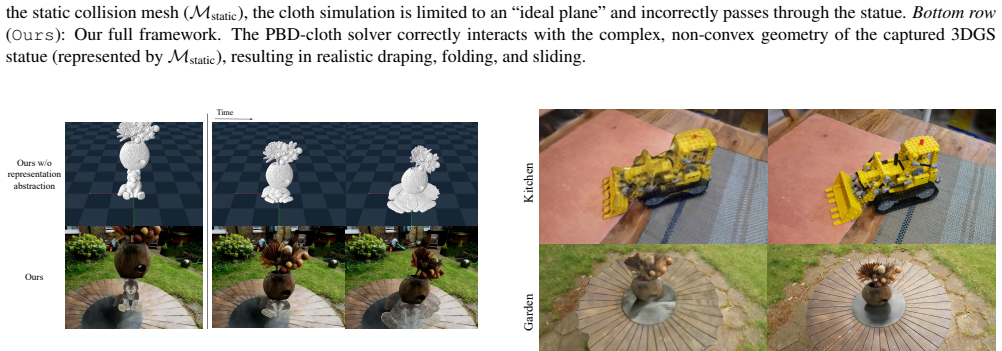
3D Gaussian Splatting (3DGS) has achieved state-of-the-art photorealistic rendering, but the representation gap prevents these assets from being physically interactive. Production-grade physics engines do not understand the 3DGS representation, while prior physics-for-3DGS methods are monolithic silos. These prior works are fundamentally limited, demonstrating only object-centric physics in isolated environments, such as on an ideal plane. They are incapable of interacting with complex static collision geometry or heterogeneous assets. We propose a novel framework that, for the first time, bridges this gap by enabling 3DGS assets to participate in scene-level, heterogeneous, multi-solver physical simulations. Our core contribution is a Representation Abstraction Framework that translates all diverse assets, including 3DGS, virtual meshes, and fluids, into a unified physical particle set. This abstraction is key to enabling complex behaviors, such as the non-rigid deformation of 3DGS assets, within a unified physics pipeline. This particle set, along with the static scene collision boundaries derived from scene capture, is processed within a solver-agnostic physics kernel. The physical results are then mapped back to drive each asset's specific visual reconstruction. This architecture unlocks capabilities impossible with prior art. We demonstrate complex, two-way interactions between deformable 3DGS assets, standard CG assets such as fluids and meshes, and large-scale captured static environments, showcasing realistic coupled phenomena that were previously unattainable.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a Representation Abstraction Framework that converts diverse assets including 3D Gaussian Splats, virtual meshes, and fluids into a unified physical particle set. This set, together with static scene collision boundaries from scene capture, is processed by a solver-agnostic physics kernel; the resulting physical state is then mapped back to update each asset's visual representation, enabling scene-level heterogeneous simulations with two-way interactions between deformable 3DGS assets, standard CG assets, and complex captured environments.
Significance. If the back-mapping step can be rigorously shown to preserve both physical accuracy and visual fidelity, the contribution would be significant: it would be the first method to support non-rigid 3DGS deformation and heterogeneous multi-solver interactions inside large-scale captured geometry, overcoming the object-centric and isolated-environment limitations of prior physics-for-3DGS work. The unified-particle abstraction itself is a clean and extensible design choice.
major comments (1)
- [Representation Abstraction Framework] Representation Abstraction Framework (core contribution paragraph and subsequent description): the reverse mapping from the unified particle set to per-Gaussian means, covariances, and opacities is stated to “drive each asset’s specific visual reconstruction” yet no explicit reconstruction procedure, optimization objective, or constraint-enforcement mechanism is supplied. Without this, it is impossible to verify that the deformed splat set simultaneously satisfies the particle-physics equations and retains the original photorealistic rendering quality under large non-rigid motion or contact with complex static boundaries—the step that is load-bearing for all claimed capabilities.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the potential significance of the Representation Abstraction Framework. We address the single major comment below and will revise the manuscript accordingly to strengthen the description of the back-mapping step.
read point-by-point responses
-
Referee: [Representation Abstraction Framework] Representation Abstraction Framework (core contribution paragraph and subsequent description): the reverse mapping from the unified particle set to per-Gaussian means, covariances, and opacities is stated to “drive each asset’s specific visual reconstruction” yet no explicit reconstruction procedure, optimization objective, or constraint-enforcement mechanism is supplied. Without this, it is impossible to verify that the deformed splat set simultaneously satisfies the particle-physics equations and retains the original photorealistic rendering quality under large non-rigid motion or contact with complex static boundaries—the step that is load-bearing for all claimed capabilities.
Authors: We agree that the current manuscript describes the back-mapping at a high level without supplying the asset-specific procedures, objectives, or constraints. In the revision we will add a dedicated subsection (likely in Section 4) that explicitly details: (1) the per-asset mapping functions (particle position o Gaussian mean, local deformation gradient o covariance update, and opacity adjustment), (2) the optimization objective used to preserve visual fidelity (a combination of position and covariance regularization terms), and (3) the constraint-enforcement steps that keep the deformed splats consistent with the underlying particle physics. These additions will enable direct verification of both physical consistency and rendering quality. revision: yes
Circularity Check
No circularity: novel unification framework presented as construction
full rationale
The paper introduces a Representation Abstraction Framework that converts heterogeneous assets (3DGS, meshes, fluids) into a unified particle set, applies a solver-agnostic kernel with static collision boundaries, and maps results back to drive visual reconstructions. No equations, fitted parameters, or self-citations are shown in the provided text that reduce any claimed prediction or result to the inputs by definition. The core claims rest on the new architecture enabling previously unattainable interactions rather than re-deriving quantities from prior fits or self-referential definitions. This is a standard case of a self-contained construction with independent content.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Physically embodied gaussian splatting: Em- bedding physical priors into a visual 3d world model for robotics
Jad Abou-Chakra, Krishan Rana, Feras Dayoub, and Niko S¨underhauf. Physically embodied gaussian splatting: Em- bedding physical priors into a visual 3d world model for robotics. InCoRL, 2023. 1
2023
-
[2]
3d gaussian splatting: Survey, technologies, challenges, and opportunities.IEEE TCSVT, 2025
Yanqi Bao, Tianyu Ding, Jing Huo, Yaoli Liu, Yuxin Li, Wenbin Li, Yang Gao, and Jiebo Luo. 3d gaussian splatting: Survey, technologies, challenges, and opportunities.IEEE TCSVT, 2025. 1, 3
2025
-
[3]
Mip-nerf: A multiscale representation for anti-aliasing neu- ral radiance fields
Jonathan T Barron, Ben Mildenhall, Matthew Tancik, Peter Hedman, Ricardo Martin-Brualla, and Pratul P Srinivasan. Mip-nerf: A multiscale representation for anti-aliasing neu- ral radiance fields. InICCV, 2021. 3
2021
-
[4]
Mip-nerf 360: Unbounded anti-aliased neural radiance fields
Jonathan T Barron, Ben Mildenhall, Dor Verbin, Pratul P Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields. InCVPR, 2022. 3
2022
-
[5]
Gasp: Gaussian splatting for physic-based simulations
Piotr Borycki, Weronika Smolak, Joanna Waczy ´nska, Marcin Mazur, Sławomir Tadeja, and Przemysław Spurek. Gasp: Gaussian splatting for physic-based simulations. arXiv preprint arXiv:2409.05819, 2024. 2, 3
-
[6]
Segment any 3d gaussians
Jiazhong Cen, Jiemin Fang, Chen Yang, Lingxi Xie, Xi- aopeng Zhang, Wei Shen, and Qi Tian. Segment any 3d gaussians. InAAAI, 2025. 3
2025
-
[7]
Pgsr: Planar-based gaussian splatting for efficient and high-fidelity surface reconstruction.IEEE TVCG, 2024
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, and Guofeng Zhang. Pgsr: Planar-based gaussian splatting for efficient and high-fidelity surface reconstruction.IEEE TVCG, 2024. 3, 7
2024
-
[8]
Unreal engine
Epic Games. Unreal engine. 1, 2, 3
-
[9]
3d gaussian splatting as new era: A survey.IEEE TVCG, 2024
Ben Fei, Jingyi Xu, Rui Zhang, Qingyuan Zhou, Weidong Yang, and Ying He. 3d gaussian splatting as new era: A survey.IEEE TVCG, 2024. 2
2024
-
[10]
Gaussian splashing: Unified particles for versatile motion synthesis and rendering
Yutao Feng, Xiang Feng, Yintong Shang, Ying Jiang, Chang Yu, Zeshun Zong, Tianjia Shao, Hongzhi Wu, Kun Zhou, Chenfanfu Jiang, et al. Gaussian splashing: Unified particles for versatile motion synthesis and rendering. InCVPR, 2025. 2
2025
-
[11]
Gaussianflow: Splatting gaussian dynamics for 4d content creation.Transactions on Machine Learning Re- search, 2025
Quankai Gao, Qiangeng Xu, Zhe Cao, Ben Mildenhall, Wenchao Ma, Le Chen, Danhang Tang, and Ulrich Neu- mann. Gaussianflow: Splatting gaussian dynamics for 4d content creation.Transactions on Machine Learning Re- search, 2025. 3
2025
-
[12]
Genesis: A Generative and Universal Physics Engine for Robotics and Beyond, 2024
Genesis Authors. Genesis: A Generative and Universal Physics Engine for Robotics and Beyond, 2024. 3, 5
2024
-
[13]
Smoothed parti- cle hydrodynamics: theory and application to non-spherical stars.Monthly notices of the royal astronomical society,
Robert A Gingold and Joseph J Monaghan. Smoothed parti- cle hydrodynamics: theory and application to non-spherical stars.Monthly notices of the royal astronomical society,
-
[14]
The franka emika robot: A reference platform for robotics research and education.IEEE Robotics & Automation Mag- azine, 2022
Sami Haddadin, Sven Parusel, Lars Johannsmeier, Saskia Golz, Simon Gabl, Florian Walch, Mohamadreza Sabaghian, Christoph J ¨ahne, Lukas Hausperger, and Simon Haddadin. The franka emika robot: A reference platform for robotics research and education.IEEE Robotics & Automation Mag- azine, 2022. 4
2022
-
[15]
2d gaussian splatting for geometrically ac- curate radiance fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically ac- curate radiance fields. InACM SIGGRAPH, 2024. 3
2024
-
[16]
Dreamphysics: Learning physical proper- ties of dynamic 3d gaussians with video diffusion priors
Tianyu Huang, Yihan Zeng, Hui Li, Wangmeng Zuo, and Rynson WH Lau. Dreamphysics: Learning physical proper- ties of dynamic 3d gaussians with video diffusion priors. In AAAI, 2025. 2
2025
-
[17]
Vr-gs: A physical dynamics-aware interactive gaussian splatting system in virtual reality
Ying Jiang, Chang Yu, Tianyi Xie, Xuan Li, Yutao Feng, Huamin Wang, Minchen Li, Henry Lau, Feng Gao, Yin Yang, et al. Vr-gs: A physical dynamics-aware interactive gaussian splatting system in virtual reality. InACM SIG- GRAPH, 2024. 1
2024
-
[18]
Geometric skinning with approximate dual quaternion blending.ACM TOG, 2008
Ladislav Kavan, Steven Collins, Ji ˇr´ı ˇZ´ara, and Carol O’Sullivan. Geometric skinning with approximate dual quaternion blending.ACM TOG, 2008. 4
2008
-
[19]
Poisson surface reconstruction
Michael Kazhdan, Matthew Bolitho, and Hugues Hoppe. Poisson surface reconstruction. InProceedings of the fourth Eurographics symposium on Geometry processing, 2006. 3
2006
-
[20]
3d gaussian splatting for real-time radiance field rendering.ACM TOG, 2023
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM TOG, 2023. 1, 3
2023
-
[21]
KiriEngine Photogrammetry Software
Kiri Engine Co., Ltd. KiriEngine Photogrammetry Software. Official Website, 2024. 7
2024
-
[22]
Tanks and temples: Benchmarking large-scale scene reconstruction.ACM TOG, 2017
Arno Knapitsch, Jaesik Park, Qian-Yi Zhou, and Vladlen Koltun. Tanks and temples: Benchmarking large-scale scene reconstruction.ACM TOG, 2017. 3
2017
-
[23]
Fangfu Liu, Hanyang Wang, Shunyu Yao, Shengjun Zhang, Jie Zhou, and Yueqi Duan. Physics3d: Learning physical properties of 3d gaussians via video diffusion.arXiv preprint arXiv:2406.04338, 2024. 2
-
[24]
Nerf: Representing scenes as neural radiance fields for view syn- thesis.ECCV, 2020
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis.ECCV, 2020. 3
2020
-
[25]
Position based dynamics.Journal of Visual Communication and Image Representation, 2007
Matthias M ¨uller, Bruno Heidelberger, Marcus Hennix, and John Ratcliff. Position based dynamics.Journal of Visual Communication and Image Representation, 2007. 2
2007
-
[26]
An- nouncing Newton, an Open-Source Physics Engine for Robotics Simulation
NVIDIA, Google DeepMind, and Disney Research. An- nouncing Newton, an Open-Source Physics Engine for Robotics Simulation. NVIDIA Developer Blog, 2025. Ac- cessed on 2025-11-14. 2, 3
2025
-
[27]
Dreamgaussian4d: Genera- tive 4d gaussian splatting.arXiv preprint arXiv:2312.17142,
Jiawei Ren, Liang Pan, Jiaxiang Tang, Chi Zhang, Ang Cao, Gang Zeng, and Ziwei Liu. Dreamgaussian4d: Genera- tive 4d gaussian splatting.arXiv preprint arXiv:2312.17142,
-
[28]
Gaus- sim: Foreseeing reality by gaussian simulator for elastic ob- jects
Yidi Shao, Mu Huang, Chen Change Loy, and Bo Dai. Gaus- sim: Foreseeing reality by gaussian simulator for elastic ob- jects. InICCV, 2025. 2, 6, 7
2025
-
[29]
Houdini 20.0.https://www.sidefx.com/,
SideFX. Houdini 20.0.https://www.sidefx.com/,
-
[30]
Accessed on 2025-11-14. 1, 3
2025
-
[31]
A particle method for history-dependent materials.Computer methods in applied mechanics and engineering, 1994
Deborah Sulsky, Zhen Chen, and Howard L Schreyer. A particle method for history-dependent materials.Computer methods in applied mechanics and engineering, 1994. 2
1994
-
[32]
Elastically deformable models
Demetri Terzopoulos, John Platt, Alan Barr, and Kurt Fleis- cher. Elastically deformable models. InProceedings of the 14th annual conference on Computer graphics and interac- tive techniques, 1987. 3
1987
-
[33]
V olinga: Interactive 3D Gaussian Splatting Viewer
V olinga AI. V olinga: Interactive 3D Gaussian Splatting Viewer. Official Website, 2024. 5
2024
-
[34]
Decoupledgaussian: Object-scene decoupling for physics-based interaction
Miaowei Wang, Yibo Zhang, Weiwei Xu, Rui Ma, Changqing Zou, and Daniel Morris. Decoupledgaussian: Object-scene decoupling for physics-based interaction. In CVPR, 2025. 2, 3
2025
-
[35]
4d gaussian splatting for real-time dynamic scene rendering
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4d gaussian splatting for real-time dynamic scene rendering. InCVPR, 2024. 3
2024
-
[36]
Physgaussian: Physics- integrated 3d gaussians for generative dynamics
Tianyi Xie, Zeshun Zong, Yuxing Qiu, Xuan Li, Yutao Feng, Yin Yang, and Chenfanfu Jiang. Physgaussian: Physics- integrated 3d gaussians for generative dynamics. InCVPR,
-
[37]
Physdreamer: Physics-based interac- tion with 3d objects via video generation
Tianyuan Zhang, Hong-Xing Yu, Rundi Wu, Brandon Y Feng, Changxi Zheng, Noah Snavely, Jiajun Wu, and William T Freeman. Physdreamer: Physics-based interac- tion with 3d objects via video generation. InECCV, 2024
2024
-
[38]
Physsplat: Efficient physics simulation for 3d scenes via mllm-guided gaussian splatting
Haoyu Zhao, Hao Wang, Xingyue Zhao, Hao Fei, Hongqiu Wang, Chengjiang Long, and Hua Zou. Physsplat: Efficient physics simulation for 3d scenes via mllm-guided gaussian splatting. InICCV, 2025. 2
2025
-
[39]
Siting Zhu, Guangming Wang, Xin Kong, Dezhi Kong, and Hesheng Wang. 3d gaussian splatting in robotics: A survey. arXiv preprint arXiv:2410.12262, 2024. 2 Scene-Level Heterogeneous Physics Simulation with 3D Gaussian Splats Supplementary Material Overview In this supplementary material, we provide additional technical details and results. Section S1 detail...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.