TouchMap-OR: Multi-View 3D Mapping of Hand-Surface Contacts
Pith reviewed 2026-05-20 13:35 UTC · model grok-4.3
The pith
TouchMap-OR reconstructs which clinician touched which surface and when during operating room procedures from multi-view RGB-D data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
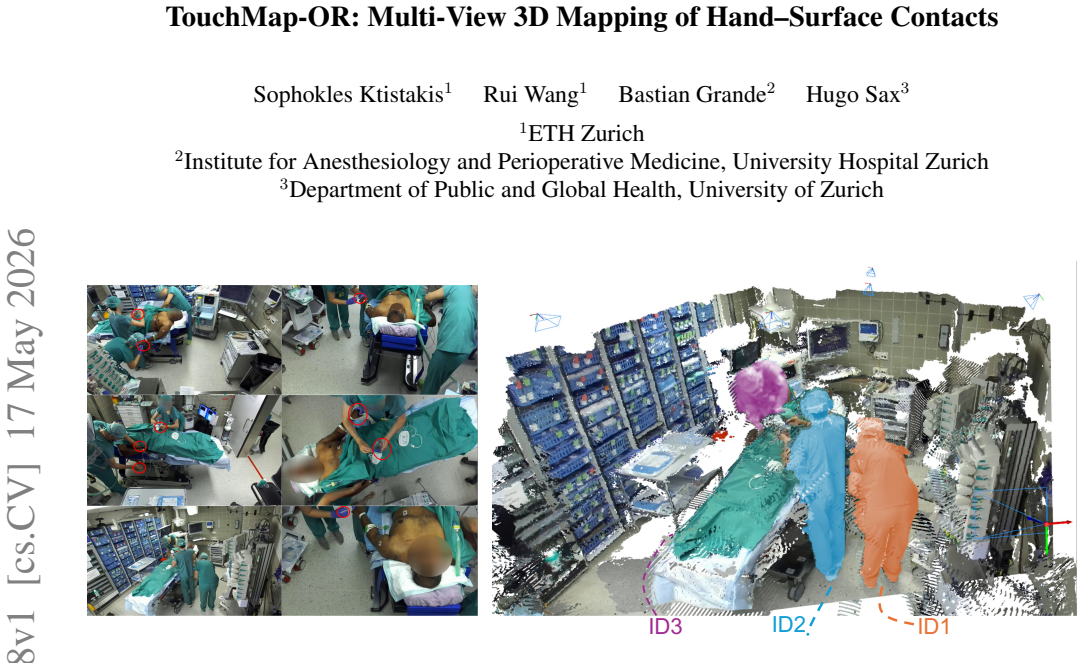
By reconstructing globally consistent multi-person 3D skeleton tracks, estimating and fusing articulated MANO hand meshes aligned to depth, and mapping the resulting hand trajectories onto a semantic 3D model of the operating room built from multi-view segmentation and depth fusion, TouchMap-OR infers contact episodes that record which clinician touched which surface and when, achieving 0.75 binary contact F1 on annotated data from three real procedures.
What carries the argument
Fusion of multi-view 3D hand trajectories with a semantic 3D room model followed by temporal proximity detection to infer contacts.
If this is right
- Detailed contact histories become available automatically without continuous human observation.
- Contacts can be attributed to specific clinicians at 0.96 accuracy.
- Multi-person 3D tracking accuracy stays comparable to existing baselines.
- Contact detection improves over simpler tracking-only methods.
- The pipeline runs on real clinical data from anesthesia procedures.
Where Pith is reading between the lines
- The same proximity-mapping idea could be tested in other contact-heavy environments such as laboratories or food handling areas.
- Adding pressure or force data from surfaces would provide an independent check on whether detected proximities correspond to touches.
- Long-term collection of such maps might reveal patterns that suggest changes to equipment layout or procedure flow.
Load-bearing premise
Hand-surface proximity measured in the reconstructed 3D trajectories accurately indicates actual physical contacts rather than near-misses.
What would settle it
Collect new recordings that include independent contact sensors on surfaces and check whether the system's proximity-based contact events match the sensor-detected events.
Figures



read the original abstract
Hand-surface interactions between clinicians, patients, and medical equipment play a central role in pathogen transmission during medical procedures. However, these interactions remain largely unobserved, as current infection-prevention practices rely on manual observation and cannot reconstruct detailed contact histories. In this work we formulate the problem of identity-resolved hand-surface interaction reconstruction in operating rooms and introduce TouchMap-OR, a multi-view RGB-D vision system that models clinicians, articulated hand geometry, and the semantic structure of the clinical environment to infer when and where contacts occur. The system reconstructs globally consistent multi-person 3D skeleton tracks across cameras while estimating articulated MANO hand meshes from RGB observations aligned to depth data. Multi-view hand reconstructions are fused and associated with tracked clinicians to obtain consistent left and right hand trajectories. A semantic 3D model of the operating room is built from multi-view segmentation and depth fusion, enabling reconstructed hand trajectories to be mapped to specific surfaces, including medical equipment, movable objects, and patient body sites. Temporal hand-surface proximity is used to infer contact episodes describing which clinician touched which surface and when. We evaluate TouchMap-OR on recordings from three real anesthesia inductions with manually annotated contact events. TouchMap-OR achieves 0.75 binary contact F1, outperforming tracking-based baselines while maintaining comparable multi-person tracking accuracy and achieving 0.96 identity attribution accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces TouchMap-OR, a multi-view RGB-D system for reconstructing identity-resolved hand-surface contacts in operating rooms. It reconstructs globally consistent multi-person 3D skeleton tracks, estimates articulated MANO hand meshes aligned to depth, builds a semantic 3D model of the OR via multi-view segmentation and depth fusion, and infers contact episodes from temporal hand-surface proximity. Evaluation on recordings from three real anesthesia inductions with manual annotations yields a binary contact F1 of 0.75 (outperforming tracking baselines), comparable multi-person tracking accuracy, and 0.96 identity attribution accuracy.
Significance. If the performance generalizes, the approach could provide automated, detailed contact histories for infection control studies in clinical environments, where manual observation is currently the norm. The combination of articulated hand modeling, multi-view fusion, and semantic surface mapping offers a concrete technical contribution to 3D reconstruction of dynamic human-object interactions.
major comments (1)
- [Evaluation] Evaluation section (and abstract): the headline 0.75 binary contact F1 and baseline outperformance are computed on recordings from only three anesthesia inductions. No cross-procedure variance, leave-one-procedure-out results, or external validation set is reported, so it remains possible that the proximity heuristic aligns with annotation patterns specific to these three cases rather than reflecting a robust property of the pipeline. This directly weakens support for the central claim of reliable contact reconstruction across varied OR conditions.
minor comments (2)
- [Methods] Abstract and methods: the description of how multi-view hand reconstructions are fused and associated with tracked clinicians would benefit from an explicit statement of the association criterion (e.g., distance threshold or appearance cue) and any handling of hand occlusions.
- [Methods] Figure captions and text: several references to 'movable objects' appear without clarifying whether the semantic model treats them as static or updates their poses across frames.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the potential clinical relevance of TouchMap-OR. We respond to the single major comment below.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section (and abstract): the headline 0.75 binary contact F1 and baseline outperformance are computed on recordings from only three anesthesia inductions. No cross-procedure variance, leave-one-procedure-out results, or external validation set is reported, so it remains possible that the proximity heuristic aligns with annotation patterns specific to these three cases rather than reflecting a robust property of the pipeline. This directly weakens support for the central claim of reliable contact reconstruction across varied OR conditions.
Authors: We acknowledge that the evaluation relies on only three real anesthesia induction procedures and that the manuscript does not report cross-procedure variance, leave-one-procedure-out results, or external validation. This is a genuine limitation stemming from the practical difficulties of recording and annotating data inside actual operating rooms. In the revised manuscript we will add per-procedure performance breakdowns and a dedicated limitations paragraph that explicitly discusses the small sample size and the risk of procedure-specific annotation patterns. We will also clarify that the three recordings involved different clinician teams and varying OR configurations. We agree that broader validation would be needed to fully support claims of robustness across varied OR conditions and intend to pursue additional data collection in follow-up work. revision: partial
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's pipeline reconstructs multi-person 3D tracks and MANO hand meshes from RGB-D input, builds a semantic OR model via segmentation and depth fusion, then applies a proximity heuristic to label contact episodes. These labels are compared to independent manual annotations on three procedures to compute F1 and accuracy metrics. No equation or step defines a quantity in terms of itself, renames a fitted parameter as a prediction, or relies on a self-citation chain for a uniqueness claim; the central empirical result is measured against external ground-truth events rather than reducing to the method's own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sari Awwad, Sanjay Tarvade, Massimo Piccardi, and David J Gattas. The use of privacy-protected computer vision to mea- sure the quality of healthcare worker hand hygiene. Inter- national Journal for Quality in Health Care , 31(1):36–42,
-
[2]
Sven Bambach, Stefan Lee, David J. Crandall, and Chen Yu. Lending a hand: Detecting hands and recognizing activities in complex egocentric interactions. In 2015 IEEE Interna- tional Conference on Computer Vision (ICCV), pages 1949– 1957, 2015. 2
work page 2015
-
[3]
3d pictorial structures for multiple human pose estimation
Vasileios Belagiannis, Sikandar Amin, Mykhaylo Andriluka, Bernt Schiele, Nassir Navab, and Slobodan Ilic. 3d pictorial structures for multiple human pose estimation. In Proceed- ings of the IEEE conference on computer vision and pattern recognition, pages 1669–1676, 2014. 3
work page 2014
-
[4]
3d pictorial structures revisited: Multiple human pose estimation
Vasileios Belagiannis, Sikandar Amin, Mykhaylo Andriluka, Bernt Schiele, Nassir Navab, and Slobodan Ilic. 3d pictorial structures revisited: Multiple human pose estimation. IEEE transactions on pattern analysis and machine intelligence , 38(10):1929–1942, 2015. 3
work page 1929
-
[5]
3d hand shape and pose from images in the wild
Adnane Boukhayma, Rodrigo de Bem, and Philip HS Torr. 3d hand shape and pose from images in the wild. In Pro- ceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10843–10852, 2019. 3
work page 2019
-
[6]
Openpose: Realtime multi-person 2d pose estimation using part affinity fields
Zhe Cao, Gines Hidalgo, Tomas Simon, Shih-En Wei, and Yaser Sheikh. Openpose: Realtime multi-person 2d pose estimation using part affinity fields. IEEE transactions on pattern analysis and machine intelligence , 43(1):172–186,
-
[7]
Junyang Chen, James F Cremer, Kasra Zarei, Alberto M Segre, and Philip M Polgreen. Using computer vision and depth sensing to measure healthcare worker-patient contacts and personal protective equipment adherence within hospi- tal rooms. In Open forum infectious diseases , page ofv200. Oxford University Press, 2016. 3
work page 2016
-
[8]
Privacy-Preserving Action Recognition for Smart Hospitals using Low-Resolution Depth Images
Edward Chou, Matthew Tan, Cherry Zou, Michelle Guo, Albert Haque, Arnold Milstein, and Li Fei-Fei. Privacy- preserving action recognition for smart hospitals using low- resolution depth images. arXiv preprint arXiv:1811.09950,
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
Fast and robust multi-person 3d pose estima- tion from multiple views
Junting Dong, Wen Jiang, Qixing Huang, Hujun Bao, and Xiaowei Zhou. Fast and robust multi-person 3d pose estima- tion from multiple views. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages 7792–7801, 2019. 3, 6
work page 2019
-
[10]
Fast and robust multi-person 3d pose estimation and tracking from multiple views
Junting Dong, Qi Fang, Wen Jiang, Yurou Yang, Qixing Huang, Hujun Bao, and Xiaowei Zhou. Fast and robust multi-person 3d pose estimation and tracking from multiple views. IEEE transactions on pattern analysis and machine intelligence, 44(10):6981–6992, 2021. 3, 6
work page 2021
-
[11]
Towards vision- based smart hospitals: a system for tracking and monitoring hand hygiene compliance
Albert Haque, Michelle Guo, Alexandre Alahi, Serena Ye- ung, Zelun Luo, Alisha Rege, Jeffrey Jopling, Lance Down- ing, William Beninati, Amit Singh, et al. Towards vision- based smart hospitals: a system for tracking and monitoring hand hygiene compliance. In Machine Learning for Health- care Conference, pages 75–87. PMLR, 2017. 2
work page 2017
-
[12]
Learning joint reconstruction of hands and manipulated ob- jects
Yana Hasson, Gul Varol, Dimitrios Tzionas, Igor Kale- vatykh, Michael J Black, Ivan Laptev, and Cordelia Schmid. Learning joint reconstruction of hands and manipulated ob- jects. In Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition , pages 11807–11816,
-
[13]
Hand pose estimation via latent 2.5 d heatmap regression
Umar Iqbal, Pavlo Molchanov, Thomas Breuel Juergen Gall, and Jan Kautz. Hand pose estimation via latent 2.5 d heatmap regression. In Proceedings of the European conference on computer vision (ECCV), pages 118–134, 2018. 3
work page 2018
-
[14]
Annette Jeanes, Pietro G. Coen, Dinah J. Gould, and Nico- las S. Drey. Validity of hand hygiene compliance measure- ment by observation: A systematic review. American Jour- nal of Infection Control, 47(3):313–322, 2019. 2
work page 2019
-
[15]
End-to-end recovery of human shape and pose
Angjoo Kanazawa, Michael J Black, David W Jacobs, and Jitendra Malik. End-to-end recovery of human shape and pose. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 7122–7131, 2018. 3
work page 2018
-
[16]
Minjee Kim, Joonmyeong Choi, Jun-Young Jo, Wook-Jong Kim, Sung-Hoon Kim, and Namkug Kim. Video-based au- tomatic hand hygiene detection for operating rooms using 3d convolutional neural networks. Journal of Clinical Monitor- ing and Computing, 38(5):1187–1197, 2024. 2
work page 2024
-
[17]
Rtmo: Towards high-performance one- stage real-time multi-person pose estimation
Peng Lu, Tao Jiang, Yining Li, Xiangtai Li, Kai Chen, and Wenming Yang. Rtmo: Towards high-performance one- stage real-time multi-person pose estimation. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1491–1500, 2024. 3
work page 2024
-
[18]
A simple yet effective baseline for 3d human pose esti- mation
Julieta Martinez, Rayat Hossain, Javier Romero, and James J Little. A simple yet effective baseline for 3d human pose esti- mation. In Proceedings of the IEEE international conference on computer vision, pages 2640–2649, 2017. 3
work page 2017
-
[19]
Detecting hands and recognizing physical contact in the wild
Supreeth Narasimhaswamy, Trung Nguyen, and Minh Hoai Nguyen. Detecting hands and recognizing physical contact in the wild. Advances in neural information processing sys- tems, 33:7841–7851, 2020. 2
work page 2020
-
[20]
Stacked hour- glass networks for human pose estimation
Alejandro Newell, Kaiyu Yang, and Jia Deng. Stacked hour- glass networks for human pose estimation. InEuropean con- ference on computer vision, pages 483–499. Springer, 2016. 3
work page 2016
-
[21]
4d-or: Semantic scene graphs for or domain modeling
Ege ¨Ozsoy, Evin Pınar ¨Ornek, Ulrich Eck, Tobias Czempiel, Federico Tombari, and Nassir Navab. 4d-or: Semantic scene graphs for or domain modeling. In International conference on medical image computing and computer-assisted inter- vention, pages 475–485. Springer, 2022. 2
work page 2022
-
[22]
Coarse-to-fine volumetric pre- diction for single-image 3d human pose
Georgios Pavlakos, Xiaowei Zhou, Konstantinos G Derpa- nis, and Kostas Daniilidis. Coarse-to-fine volumetric pre- diction for single-image 3d human pose. In Proceedings of the IEEE conference on computer vision and pattern recog- nition, pages 7025–7034, 2017. 3
work page 2017
-
[23]
Wilor: End-to-end 3d hand localization and reconstruction in-the-wild
Rolandos Alexandros Potamias, Jinglei Zhang, Jiankang Deng, and Stefanos Zafeiriou. Wilor: End-to-end 3d hand localization and reconstruction in-the-wild. In Proceedings of the Computer Vision and Pattern Recognition Conference, pages 12242–12254, 2025. 3
work page 2025
-
[24]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman R¨adle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos. arXiv preprint arXiv:2408.00714, 2024. 3
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[25]
Em- bodied hands: Modeling and capturing hands and bodies to- gether
Javier Romero, Dimitrios Tzionas, and Michael J Black. Em- bodied hands: Modeling and capturing hands and bodies to- gether. arXiv preprint arXiv:2201.02610, 2022. 3
-
[26]
Hugo Sax, Benedetta Allegranzi, Ilker Uckay, E Larson, J Boyce, and Didier Pittet. ‘my five moments for hand hy- giene’: a user-centred design approach to understand, train, monitor and report hand hygiene. Journal of Hospital infec- tion, 67(1):9–21, 2007. 2
work page 2007
-
[27]
Jan B Schmutz, Bastian Grande, and Hugo Sax. Who ‘my five moments for hand hygiene’in anaesthesia induction: a video-based analysis reveals novel system challenges and de- sign opportunities. Journal of Hospital Infection , 135:163– 170, 2023. 2
work page 2023
-
[28]
Understanding human hands in contact at inter- net scale
Dandan Shan, Jiaqi Geng, Michelle Shu, and David F Fouhey. Understanding human hands in contact at inter- net scale. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 9869–9878,
-
[29]
Hand keypoint detection in single images using mul- tiview bootstrapping
Tomas Simon, Hanbyul Joo, Iain Matthews, and Yaser Sheikh. Hand keypoint detection in single images using mul- tiview bootstrapping. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition , pages 1145– 1153, 2017. 3
work page 2017
-
[30]
Automatic de- tection of hand hygiene using computer vision technology
Amit Singh, Albert Haque, Alexandre Alahi, Serena Ye- ung, Michelle Guo, Jill R Glassman, William Beninati, Terry Platchek, Li Fei-Fei, and Arnold Milstein. Automatic de- tection of hand hygiene using computer vision technology. Journal of the American Medical Informatics Association , 27(8):1316–1320, 2020. 2
work page 2020
-
[31]
Deeppose: Human pose estimation via deep neural networks
Alexander Toshev and Christian Szegedy. Deeppose: Human pose estimation via deep neural networks. In Proceedings of the IEEE conference on computer vision and pattern recog- nition, pages 1653–1660, 2014. 3
work page 2014
-
[32]
En- donet: a deep architecture for recognition tasks on laparo- scopic videos
Andru P Twinanda, Sherif Shehata, Didier Mutter, Jacques Marescaux, Michel De Mathelin, and Nicolas Padoy. En- donet: a deep architecture for recognition tasks on laparo- scopic videos. IEEE transactions on medical imaging , 36 (1):86–97, 2016. 2
work page 2016
-
[33]
4d association graph for realtime multi-person motion capture using multiple video cameras
Yuxiang Zhang, Liang An, Tao Yu, Xiu Li, Kun Li, and Yebin Liu. 4d association graph for realtime multi-person motion capture using multiple video cameras. In Proceed- ings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1324–1333, 2020. 3, 6
work page 2020
-
[34]
Learning to esti- mate 3d hand pose from single rgb images
Christian Zimmermann and Thomas Brox. Learning to esti- mate 3d hand pose from single rgb images. InProceedings of the IEEE international conference on computer vision, pages 4903–4911, 2017. 3
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.