Planning Neural Dynamics with Lie Group Embedding through Supervised Projective Manifold Learning
Pith reviewed 2026-06-30 11:33 UTC · model grok-4.3
The pith
Lie group embedding allows stable and learnable dynamics on manifolds by constraining neural network weights to respect group structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
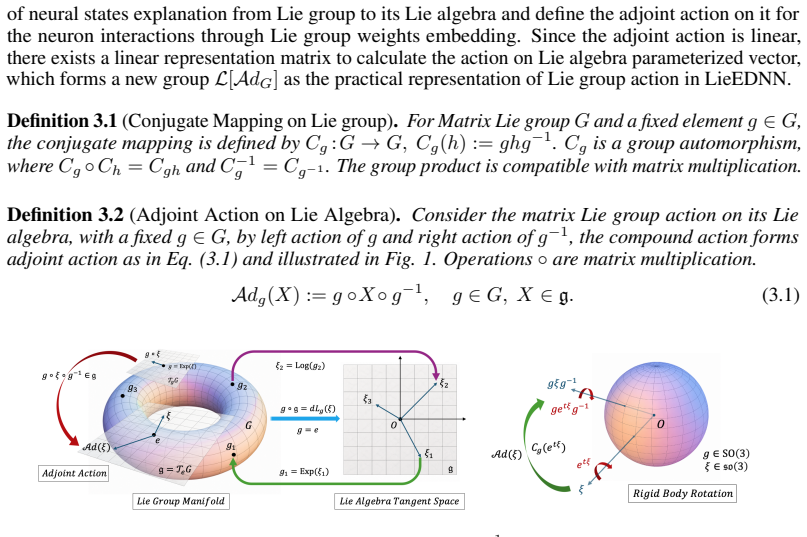
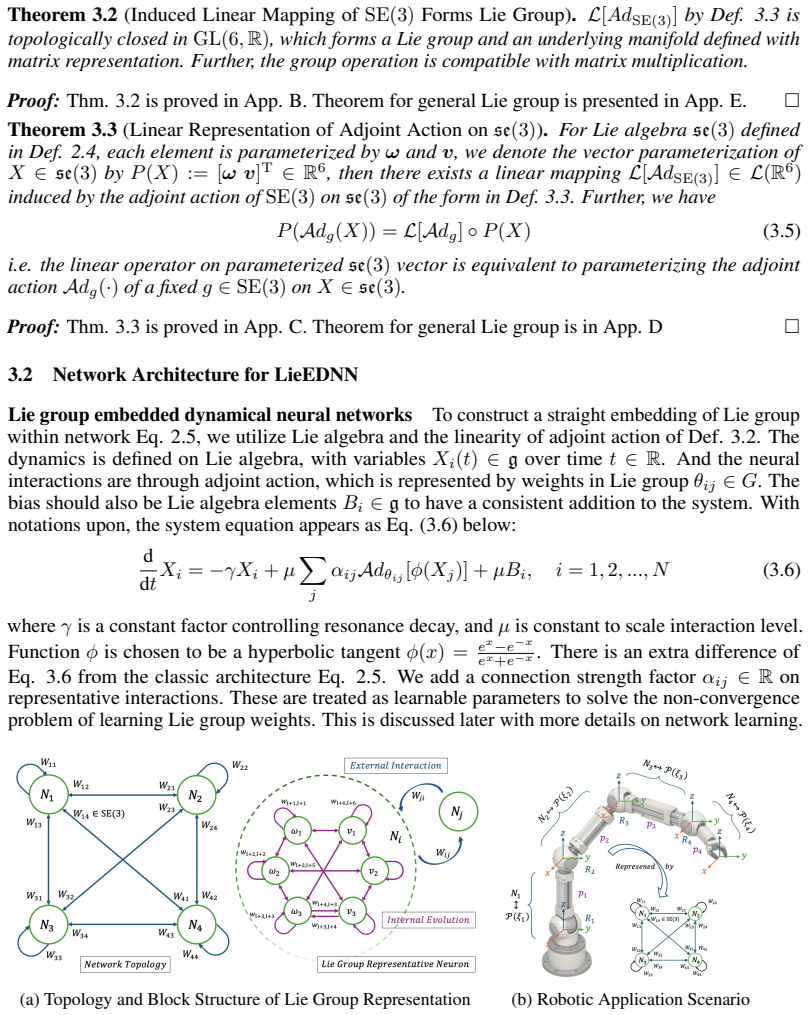
By parameterizing the adjoint Lie group action as a linear transformation on the Lie algebra, the method induces a block-wise structure on weight matrices that allows addition to operate in vector space while maintaining manifold constraints, enabling gradient-based learning of stable temporal dynamics on general Lie groups such as SE(3).
What carries the argument
The adjoint action of the Lie group on its algebra, which provides a linear mapping that structures the neural network weights into blocks compatible with manifold geometry.
If this is right
- Stable dynamics can be learned on the manifold for any Lie group.
- Representation power of groups like SO(3) and SE(3) can be used directly in neural networks for robotics and control.
- Algorithms based on gradient descent and metric projection guarantee stability of the temporal dynamics.
- Practical implementation demonstrated on SE(3) for telescopic manipulators.
Where Pith is reading between the lines
- This approach might extend to other symmetric systems beyond robotics, such as molecular modeling where rotations matter.
- Integrating with existing neural ODE solvers could become straightforward once the projection step is added.
- The method suggests that many physical systems could benefit from built-in symmetry preservation rather than learning it from data.
Load-bearing premise
Gradient descent plus metric projection can stably learn the block-wise manifold constraints on the weight matrices without destroying the group structure or causing instability in the dynamics.
What would settle it
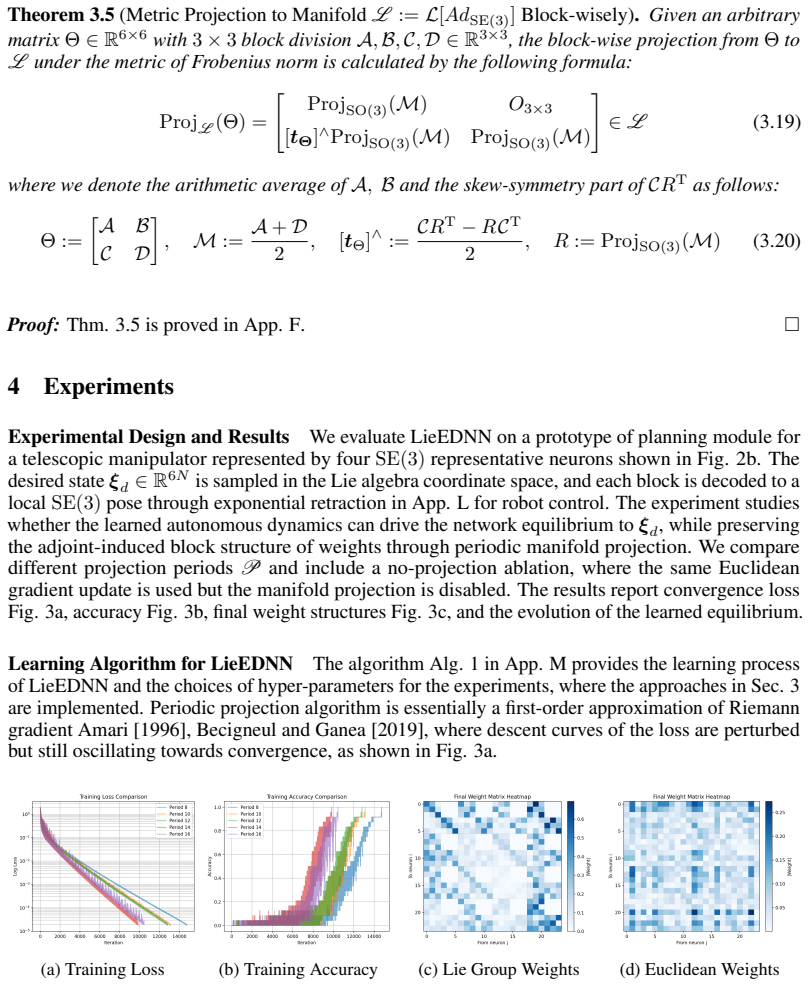
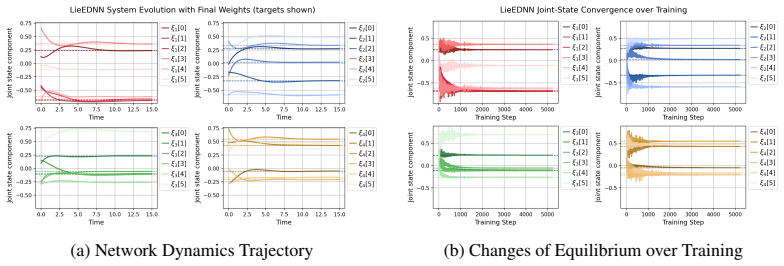
Training the network on SE(3) data and checking whether the learned weights satisfy the manifold constraints and whether the simulated trajectories remain on the group manifold without diverging.
Figures
read the original abstract
We propose Lie group embedded dynamical neural networks (LieEDNN) and the corresponding learning algorithms based on gradient descent and metric projection on smooth manifold, where we treat Lie group as an intrinsic representation for continuous symmetry of manifold geometry. Thereby we achieve learnable and stable dynamics on the underlying manifold for general Lie group, and we are able to utilize the powerful representation capability of Lie group such as SO(3) and SE(3) to solve real world engineering problems in areas such as robotics, graphics, and control. Two core challenges are: (i) General Lie groups are incompatible with addition arithmetic, which is necessary for neural network interactions. (ii) The dynamics evolve in the nonlinear representation space of special algebra rather than the normal Euclidean space, which violates the paradigm of common neural ODEs. To address these two challenges, we firstly introduce adjoint Lie group action on the Lie algebra, which induces a linear mapping and transfer to the block-wise structure of weight matrices, such that addition could operate on the Lie algebra as a vector space. Then we parameterize the Lie algebra and the adjoint action as linear transformation so that the architecture is aligned with neural network perceptrons. Explicitly, this embedding appears as block-wise manifold constraints on weights, and we develop algorithms to learn the equilibrium with stability guarantees of the temporal neural network dynamics. Experiments are implemented on a specific Lie group SE(3), with the application scenario of telescopic manipulators.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Lie group embedded dynamical neural networks (LieEDNN) that embed general Lie groups into neural ODEs by using the adjoint action to induce linear mappings on the Lie algebra, which in turn impose block-wise manifold constraints on the weight matrices of the network. These constraints are enforced during learning via gradient descent combined with metric projection on the manifold, with the goal of producing stable temporal dynamics that respect the underlying group structure. The approach is positioned as addressing the incompatibility of Lie groups with Euclidean addition and the nonlinear nature of the dynamics; experiments are reported only for the specific case of SE(3) applied to telescopic manipulator control.
Significance. If the stability guarantees and the preservation of group structure under the proposed projection step hold beyond the demonstrated case, the work would offer a concrete mechanism for incorporating continuous symmetries into neural dynamical models, which could be valuable for robotics, graphics, and control applications where SO(3) and SE(3) representations are already standard. The reduction of adjoint actions to linear transformations on the algebra that align with perceptron layers is a technically interesting device that could bridge geometric and standard neural architectures.
major comments (2)
- [Abstract] Abstract: the claim that 'algorithms with stability guarantees of the temporal neural network dynamics' are developed for general Lie groups is load-bearing for the central contribution, yet the only reported experiments use SE(3) on telescopic manipulators; no results, ablation, or analysis are supplied for other groups (e.g., SO(3) or non-compact cases), so the generality of the metric-projection step remains unverified.
- [The section on the learning algorithm and stability guarantees] The section describing the adjoint-action parameterization and the induced block-wise manifold constraints: the assumption that gradient descent plus metric projection on these constraints will preserve the original Lie-algebra embedding and produce stable dynamics is stated but not accompanied by a derivation, Lyapunov-style argument, or counter-example check that would apply outside the SE(3) setting; if the projection step introduces drift for other groups, the claim that the method works for general Lie groups does not hold.
minor comments (1)
- [Abstract] The abstract and introduction would benefit from an explicit statement of the precise form of the metric projection operator and the manifold on which it acts (e.g., an equation defining the projection).
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the importance of verifying generality and providing explicit stability arguments. We address each major point below, indicating where revisions will be made to clarify the scope and strengthen the presentation without altering the core claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'algorithms with stability guarantees of the temporal neural network dynamics' are developed for general Lie groups is load-bearing for the central contribution, yet the only reported experiments use SE(3) on telescopic manipulators; no results, ablation, or analysis are supplied for other groups (e.g., SO(3) or non-compact cases), so the generality of the metric-projection step remains unverified.
Authors: The theoretical construction using adjoint actions to induce block-wise manifold constraints on weights and metric projection to enforce them is derived without reference to a specific group, relying only on the vector space structure of the Lie algebra and the existence of a suitable metric. SE(3) serves as a representative non-compact example with practical relevance; the same parameterization applies directly to SO(3) and other compact groups. We will revise the abstract to state that the method is developed for general Lie groups with empirical demonstration on SE(3), and add a short paragraph in the experiments section discussing extension to SO(3). revision: partial
-
Referee: [The section on the learning algorithm and stability guarantees] The section describing the adjoint-action parameterization and the induced block-wise manifold constraints: the assumption that gradient descent plus metric projection on these constraints will preserve the original Lie-algebra embedding and produce stable dynamics is stated but not accompanied by a derivation, Lyapunov-style argument, or counter-example check that would apply outside the SE(3) setting; if the projection step introduces drift for other groups, the claim that the method works for general Lie groups does not hold.
Authors: The projection step is defined to be the nearest-point projection onto the submanifold of weight matrices satisfying the block-wise constraints induced by the adjoint representation; by construction this restores exact satisfaction of the constraints after each gradient step, thereby preserving the Lie-algebra embedding. Stability follows from the fact that the resulting vector field on the algebra is linear and the manifold is invariant under the group action. We will expand the learning-algorithm section with an explicit invariance argument showing that the projected dynamics remain on the manifold for any Lie group admitting a bi-invariant metric, and note that full Lyapunov analysis for arbitrary groups is left for future work. revision: yes
Circularity Check
No significant circularity detected
full rationale
The derivation begins from standard Lie group properties (adjoint action inducing linear maps on the algebra), parameterizes the embedding to produce block-wise manifold constraints on weights, and proposes GD + metric projection algorithms claimed to preserve structure and yield stable dynamics. No equation or step reduces the claimed stability guarantees or general-Lie-group applicability to a fitted parameter, self-citation chain, or input by construction. The method is presented as an architectural choice aligned with neural ODEs, with experiments on SE(3) serving as validation rather than the sole source of the result. This is a self-contained proposal without the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Adjoint action of a Lie group on its algebra induces a linear map compatible with neural-network addition
- domain assumption Metric projection onto the manifold after each gradient step preserves stability of the learned dynamics
Reference graph
Works this paper leans on
-
[1]
Neural Learning in Structured Parameter Spaces - Natural Riemannian Gradient
Shun-ichi Amari. Neural Learning in Structured Parameter Spaces - Natural Riemannian Gradient . In M.C. Mozer, M. Jordan, and T. Petsche, editors, Advances in Neural Information Processing Systems, volume 9. MIT Press, 1996. URL https://proceedings.neurips.cc/paper_files/paper/1996/file/39e4973ba3321b80f37d9b55f63ed8b8-Paper.pdf
1996
-
[2]
M. A. Armstrong. Groups and Symmetry. Springer New York, 1988. URL https://doi.org/10.1007/978-1-4757-4034-9
-
[3]
Timothy D. Barfoot. State Estimation for Robotics . Cambridge University Press, 2024
2024
-
[4]
Riemannian Adaptive Optimization Methods
Gary Becigneul and Octavian-Eugen Ganea. Riemannian Adaptive Optimization Methods . In International Conference on Learning Representations, 2019. URL https://openreview.net/forum?id=r1eiqi09K7
2019
-
[5]
A Tutorial on SE(3) Transformation Parameterizations and On-manifold Optimization
Jos \'e Luis Blanco-Claraco. A Tutorial on SE(3) Transformation Parameterizations and On-manifold Optimization . arXiv preprint arXiv:2103.15980, 2021. URL https://doi.org/10.48550/arXiv.2103.15980
-
[6]
Geometric Deep Learning: Grids, Groups, Graphs, Geodesics, and Gauges
Michael M. Bronstein, Joan Bruna, Taco Cohen, and Petar Veličković. Geometric Deep Learning: Grids, Groups, Graphs, Geodesics, and Gauges , 2021. URL https://arxiv.org/abs/2104.13478
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[7]
La th \'e orie des groupes finis et continus et l'Analysis Situs
\'E lie Cartan. La th \'e orie des groupes finis et continus et l'Analysis Situs . Gauthier-Villars, 1930. URL https://eudml.org/doc/192641
1930
-
[8]
Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural Ordinary Differential Equations . In Advances in Neural Information Processing Systems, volume 31. Curran Associates, Inc., 2018. URL https://proceedings.neurips.cc/paper_files/paper/2018/file/69386f6bb1dfed68692a24c8686939b9-Paper.pdf
2018
-
[9]
Tianping Chen and S.I. Amari. Stability of asymmetric Hopfield networks . IEEE Transactions on Neural Networks, 12 0 (1): 0 159--163, 2001. doi:10.1109/72.896806
-
[10]
RMPflow: A Computational Graph for Automatic Motion Policy Generation
Ching-An Cheng, Mustafa Mukadam, Jan Issac, Stan Birchfield, Dieter Fox, Byron Boots, and Nathan Ratliff. RMPflow: A Computational Graph for Automatic Motion Policy Generation . In International Workshop on the Algorithmic Foundations of Robotics, pages 441--457. Springer, 2018
2018
-
[11]
Group Equivariant Convolutional Networks
Taco Cohen and Max Welling. Group Equivariant Convolutional Networks . In Maria Florina Balcan and Kilian Q. Weinberger, editors, Proceedings of The 33rd International Conference on Machine Learning, volume 48 of Proceedings of Machine Learning Research, pages 2990--2999, New York, New York, USA, 20--22 Jun 2016. PMLR. URL https://proceedings.mlr.press/v4...
2016
-
[12]
A Proposal on Machine Learning via Dynamical Systems
Weinan E. A Proposal on Machine Learning via Dynamical Systems . Communications in Mathematics and Statistics, 2017
2017
-
[13]
Generalizing Convolutional Neural Networks for Equivariance to Lie Groups on Arbitrary Continuous Data
Marc Finzi, Samuel Stanton, Pavel Izmailov, and Andrew Gordon Wilson. Generalizing Convolutional Neural Networks for Equivariance to Lie Groups on Arbitrary Continuous Data . In Hal Daumé III and Aarti Singh, editors, Proceedings of the 37th International Conference on Machine Learning, volume 119 of Proceedings of Machine Learning Research, pages 3165--3...
2020
-
[14]
Approximation of dynamical systems by continuous time recurrent neural networks
Ken-ichi Funahashi and Yuichi Nakamura. Approximation of dynamical systems by continuous time recurrent neural networks . Neural networks, 6 0 (6): 0 801--806, 1993
1993
-
[15]
Deep Learning , 2016
Ian Goodfellow, Yoshua Bengio, and Aaron Courville. Deep Learning , 2016
2016
-
[16]
K. Gopalsamy and Xue Zhong He. Stability in asymmetric Hopfield nets with transmission delays . Physica D: Nonlinear Phenomena, 76 0 (4): 0 344--358, 1994. ISSN 0167-2789. doi:https://doi.org/10.1016/0167-2789(94)90043-4. URL https://www.sciencedirect.com/science/article/pii/0167278994900434
-
[17]
Brian C. Hall. Lie Groups, Lie Algebras, and Representations. An Elementary Introduction. Springer Cham, 2015. URL https://doi.org/10.1007/978-3-319-13467-3
-
[18]
Deep Residual Learning for Image Recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep Residual Learning for Image Recognition . In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2016
2016
-
[19]
Complex-valued neural networks
Akira Hirose. Complex-valued neural networks. Springer, 2006
2006
-
[20]
Long Short-term Memory
Sepp Hochreiter and J \"u rgen Schmidhuber. Long Short-term Memory . Neural computation, 9 0 (8): 0 1735--1780, 1997
1997
-
[21]
J. J. Hopfield. Brain, Neural Networks, and Computation . Reviews of Modern Physics, 1999. URL https://journals.aps.org/rmp/abstract/10.1103/RevModPhys.71.S431
-
[22]
J. J. Hopfield. H opfield network. Scholarpedia, 2 0 (5): 0 1977, 2007. URL http://www.scholarpedia.org/article/Hopfield_network. revision \#196687
1977
-
[23]
STOMP: Stochastic trajectory optimization for motion planning
Mrinal Kalakrishnan, Sachin Chitta, Evangelos Theodorou, Peter Pastor, and Stefan Schaal. STOMP: Stochastic trajectory optimization for motion planning . In 2011 IEEE international conference on robotics and automation, pages 4569--4574. IEEE, 2011
2011
-
[24]
a nder, Andreas Hermann, Arne Roennau, Thomas Schamm, J Marius Zollner, and R \
Sebastian Klemm, Jan Oberl \"a nder, Andreas Hermann, Arne Roennau, Thomas Schamm, J Marius Zollner, and R \"u diger Dillmann. RRT*-Connect: Faster, asymptotically optimal motion planning . In 2015 IEEE international conference on robotics and biomimetics (ROBIO), pages 1670--1677. IEEE, 2015
2015
-
[25]
RRT-connect: An efficient approach to single-query path planning
James J Kuffner and Steven M LaValle. RRT-connect: An efficient approach to single-query path planning . In Proceedings 2000 ICRA. Millennium conference. IEEE international conference on robotics and automation. Symposia proceedings (Cat. No. 00CH37065), volume 2, pages 995--1001. IEEE, 2000
2000
-
[26]
An Introduction to Differential Manifolds
Jacques Lafontaine. An Introduction to Differential Manifolds. Springer Cham, 2015. URL https://doi.org/10.1007/978-3-319-20735-3
-
[27]
Deep Learning
Yann LeCun, Yoshua Bengio, and Geoffrey Hinton. Deep Learning . nature, 521 0 (7553): 0 436--444, 2015
2015
-
[28]
John M. Lee. Introduction to Smooth Manifolds . Springer New York, 2012. URL https://doi.org/10.1007/978-1-4419-9982-5
-
[29]
Theory of Transformation Groups
Sophus Lie. Theory of Transformation Groups . Springer Berlin, Heidelberg, 2015. URL https://doi.org/10.1007/978-3-662-46211-9
-
[30]
A. M. LYAPUNOV. The general problem of the stability of motion . International Journal of Control, 55 0 (3): 0 531--534, 1992. doi:10.1080/00207179208934253. URL https://doi.org/10.1080/00207179208934253
-
[31]
Modern robotics: Mechanics, Planning, and Control
Kevin M Lynch and Frank C Park. Modern robotics: Mechanics, Planning, and Control . Cambridge University Press, 2017
2017
-
[32]
Mohammad Khansari-Zadeh and Aude Billard
S. Mohammad Khansari-Zadeh and Aude Billard. Learning control Lyapunov function to ensure stability of dynamical system-based robot reaching motions . Robotics and Autonomous Systems, 62 0 (6): 0 752--765, 2014. ISSN 0921-8890. doi:https://doi.org/10.1016/j.robot.2014.03.001. URL https://www.sciencedirect.com/science/article/pii/S0921889014000372
-
[33]
A Mathematical Introduction to Robotic Manipulation
Richard M Murray, Zexiang Li, and S Shankar Sastry. A Mathematical Introduction to Robotic Manipulation . CRC press, 2017
2017
-
[34]
Quaternion Recurrent Neural Networks
Titouan Parcollet, Mirco Ravanelli, Mohamed Morchid, Georges Linar \`e s, Chiheb Trabelsi, Renato de Mori, and Yoshua Bengio. Quaternion Recurrent Neural Networks . In International Conference on Learning Representations (ICLR) 2019, 2019
2019
-
[35]
Chomp: Gradient optimization techniques for efficient motion planning
Nathan Ratliff, Matt Zucker, J Andrew Bagnell, and Siddhartha Srinivasa. Chomp: Gradient optimization techniques for efficient motion planning. In 2009 IEEE international conference on robotics and automation, pages 489--494. IEEE, 2009
2009
-
[36]
Learning Representations by Back-propagating Errors
David E Rumelhart, Geoffrey E Hinton, and Ronald J Williams. Learning Representations by Back-propagating Errors . nature, 323 0 (6088): 0 533--536, 1986
1986
-
[37]
Shankar Sastry. Lyapunov Stability Theory . Springer, New York, 1999. ISBN 978-1-4757-3108-8. doi:10.1007/978-1-4757-3108-8_5. URL https://doi.org/10.1007/978-1-4757-3108-8_5
-
[38]
Motion planning with sequential convex optimization and convex collision checking
John Schulman, Yan Duan, Jonathan Ho, Alex Lee, Ibrahim Awwal, Henry Bradlow, Jia Pan, Sachin Patil, Ken Goldberg, and Pieter Abbeel. Motion planning with sequential convex optimization and convex collision checking . The International Journal of Robotics Research, 33 0 (9): 0 1251--1270, 2014
2014
-
[39]
Deep Complex Networks
Chiheb Trabelsi, Olexa Bilaniuk, Ying Zhang, Dmitriy Serdyuk, Sandeep Subramanian, Joao Felipe Santos, Soroush Mehri, Negar Rostamzadeh, Yoshua Bengio, and Christopher J Pal. Deep Complex Networks . In International Conference on Learning Representations, 2018. URL https://openreview.net/forum?id=H1T2hmZAb
2018
-
[40]
Attention is All You Need
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, ukasz Kaiser, and Illia Polosukhin. Attention is All You Need . Advances in Neural Information Processing Systems, 30, 2017. URL https://proceedings.neurips.cc/paper/2017/hash/3f5ee243547dee91fbd053c1c4a845aa-Abstract.html
2017
-
[41]
J. von Neumann. Über die analytischen Eigenschaften von Gruppen linearer Transformationen und ihrer Darstellungen . Springer Nature, 1929. URL https://doi.org/10.1007/BF01187749
-
[42]
Ma, and W
Tianwei Wang, X. Ma, and W. Pang. Asymptotically Stable Quaternion-valued Hopfield-structured Neural Network with Periodic Projection-based Supervised Learning Rules . In NeurIPS Proceedings, Advances in Neural Information Processing Systems, 2025. URL https://proceedings.neurips.cc/paper_files/paper/2025/hash/7dd7f5b945ed049d124136a3b6fedcf0-Abstract-Con...
2025
-
[43]
Asymmetric Hopfield-type networks: Theory and applications
Zong-Ben Xu, Guo-Qing Hu, and Chung-Ping Kwong. Asymmetric Hopfield-type networks: Theory and applications . Neural Networks, 9 0 (3): 0 483--501, 1996. ISSN 0893-6080. doi:https://doi.org/10.1016/0893-6080(95)00114-X. URL https://www.sciencedirect.com/science/article/pii/089360809500114X
-
[44]
Efficient Continuous-Time Asymmetric Hopfield Networks for Memory Retrieval
Pengsheng Zheng, Wansheng Tang, and Jianxiong Zhang. Efficient Continuous-Time Asymmetric Hopfield Networks for Memory Retrieval . Neural Computation, 22 0 (6): 0 1597--1614, 06 2010. ISSN 0899-7667. URL https://doi.org/10.1162/neco.2010.05-09-1014
-
[45]
Quaternion Convolutional Neural Networks
Xuanyu Zhu, Yi Xu, Hongteng Xu, and Changjian Chen. Quaternion Convolutional Neural Networks . In Proceedings of the European Conference on Computer Vision (ECCV), September 2018
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.