GPU-Parallel Linearization Error Bounds for Real-Time Robust Optimal Control of Nonlinear and Neural Network Dynamics
Pith reviewed 2026-07-02 07:09 UTC · model grok-4.3
The pith
GPU-parallel linearization error bounds enable real-time robust optimal control for nonlinear and neural network dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that path-based Hessian bounds for analytic dynamics and verifier-generated affine relaxations with Jacobian corrections for NN dynamics produce sound and tight LEBs that, when used in an adapted GPU-parallel system-level synthesis solver handling right-invertible disturbances and non-zero-centered sets, allow online computation of robust policies with tight formally verified reachable tubes.
What carries the argument
GPU-parallel linearization error bounds (LEBs) within the GPUSLS-LEO framework, combining path-based Hessian bounds or NN verifier relaxations with an adapted SLS solver for zonotopic propagation.
If this is right
- Robust feedback policies accounting for linearization error can be optimized online at up to 67 Hz for systems with up to 168 states.
- The resulting reachable tubes are tighter than those from baseline methods, reducing conservativeness.
- Formal guarantees on robust constraint satisfaction are preserved for both nonlinear analytic and neural network dynamics.
- Solve times are reduced compared to previous approaches while maintaining real-time performance.
Where Pith is reading between the lines
- The differentiability of the LEBs could allow end-to-end learning of dynamics models that are directly compatible with robust control.
- Application to real-world systems like autonomous vehicles or robotics with learned NN dynamics might become practical due to the speed.
- Extensions to other uncertainty sets beyond zonotopes could further improve tightness in specific applications.
Load-bearing premise
The NN verifier-generated affine relaxations combined with local Jacobian corrections produce LEBs that remain both sound and sufficiently tight for the downstream robust control problem to remain feasible and non-conservative.
What would settle it
Demonstration of a nonlinear or NN system where the computed LEBs do not overapproximate the actual linearization error, causing the closed-loop system to violate constraints despite the formal guarantees.
Figures

read the original abstract
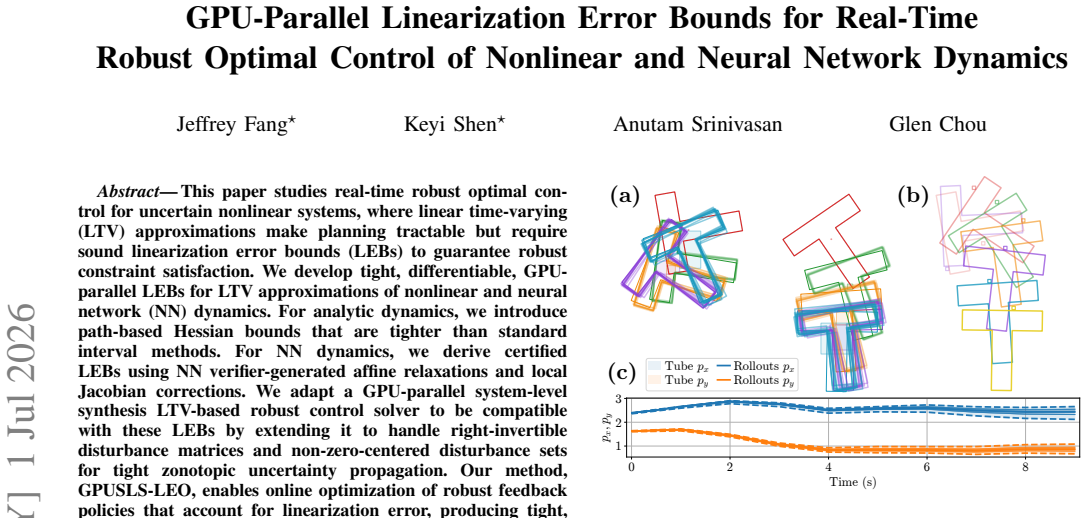
This paper studies real-time robust optimal control for uncertain nonlinear systems, where linear time-varying (LTV) approximations make planning tractable but require sound linearization error bounds (LEBs) to guarantee robust constraint satisfaction. We develop tight, differentiable, GPU-parallel LEBs for LTV approximations of nonlinear and neural network (NN) dynamics. For analytic dynamics, we introduce path-based Hessian bounds that are tighter than standard interval methods. For NN dynamics, we derive certified LEBs using NN verifier-generated affine relaxations and local Jacobian corrections. We adapt a GPU-parallel system-level synthesis LTV-based robust control solver to be compatible with these LEBs by extending it to handle right-invertible disturbance matrices and non-zero-centered disturbance sets for tight zonotopic uncertainty propagation. Our method, GPUSLS-LEO, enables online optimization of robust feedback policies that account for linearization error, producing tight, formally verified reachable tubes. On complex nonlinear and NN dynamics up to 168 state dimensions, our method can compute robust control policies on the GPU at rates up to 67 Hz, reducing solve times and conservativeness relative to baselines while preserving formal guarantees and real-time performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to develop GPU-parallel, tight, differentiable linearization error bounds (LEBs) for LTV approximations of nonlinear and neural-network dynamics. For analytic dynamics it introduces path-based Hessian bounds; for NN dynamics it uses NN-verifier affine relaxations plus local Jacobian corrections. These LEBs are integrated into an adapted GPU-parallel system-level synthesis (SLS) robust controller that is extended to right-invertible disturbance matrices and non-zero-centered zonotopes. The resulting GPUSLS-LEO method is reported to compute robust feedback policies at up to 67 Hz on systems with up to 168 states while preserving formal guarantees and reducing conservativeness relative to baselines.
Significance. If the claimed soundness and tightness of the LEB constructions hold, the work would enable real-time, formally verified robust control for high-dimensional nonlinear and NN systems, a capability with clear relevance to robotics and autonomous systems. The explicit algorithmic constructions, GPU-parallel implementation, and solver extensions for zonotopic uncertainty are concrete strengths that could be adopted by the community.
major comments (1)
- [NN dynamics LEBs] Abstract and NN-dynamics LEB paragraph: the central claim that verifier-generated affine relaxations combined with local Jacobian corrections yield sound and sufficiently tight LEBs for downstream SLS propagation is load-bearing; the manuscript must supply the explicit error-bound derivation (including how the corrections interact with non-zero-centered zonotopes) so that soundness can be verified without gaps.
minor comments (2)
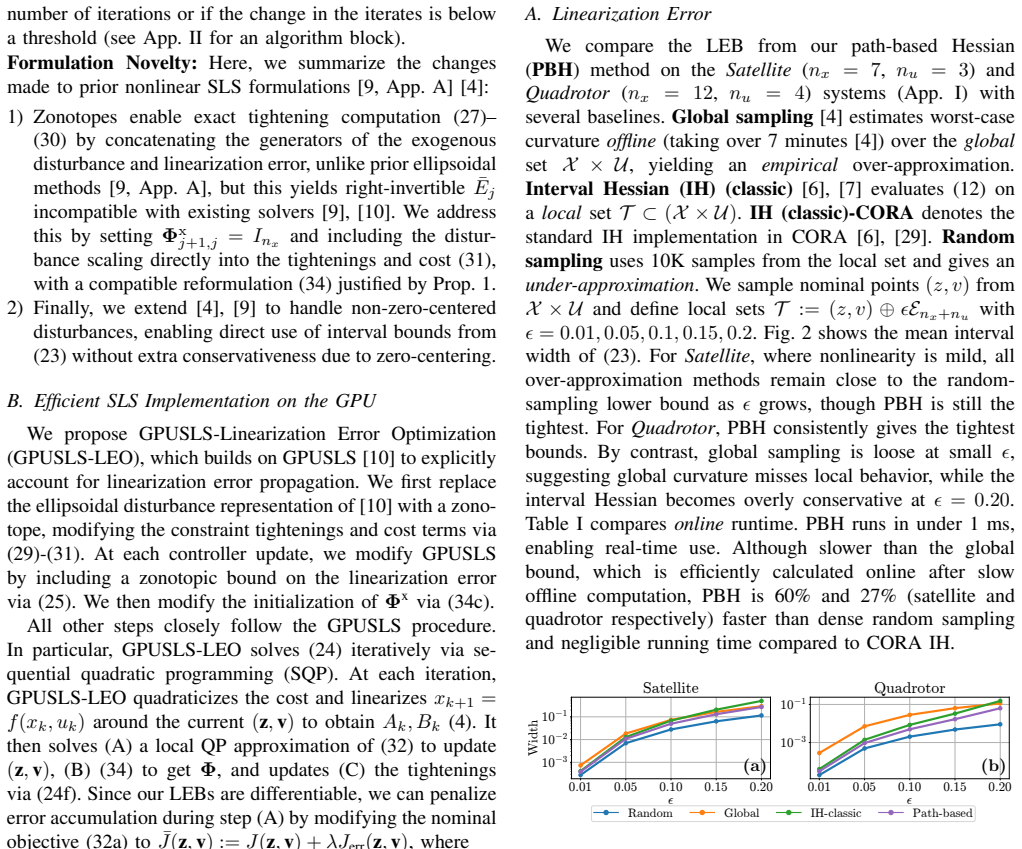
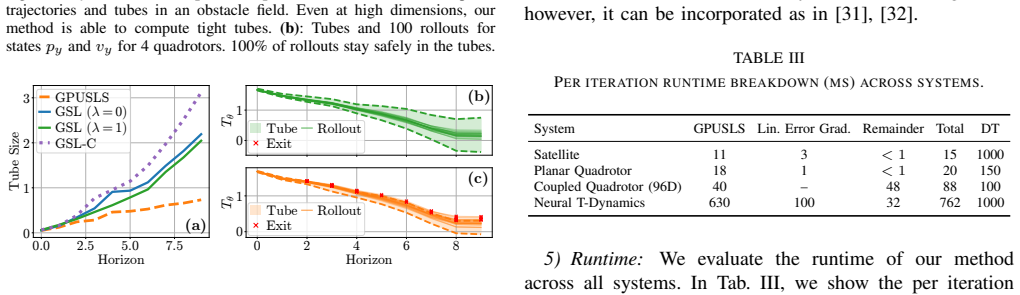
- [Abstract] The abstract states that the method reduces conservativeness relative to baselines; a dedicated table or figure with quantitative error-volume or feasibility comparisons (including interval-method baselines) should be referenced in the main text.
- [SLS solver adaptation] Notation for the adapted SLS solver (right-invertible disturbance matrices) should be introduced with a short equation or definition block before the algorithmic description to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for highlighting the importance of explicit soundness arguments for the NN-dynamics LEBs. We address the single major comment below and will revise the manuscript to strengthen the presentation.
read point-by-point responses
-
Referee: [NN dynamics LEBs] Abstract and NN-dynamics LEB paragraph: the central claim that verifier-generated affine relaxations combined with local Jacobian corrections yield sound and sufficiently tight LEBs for downstream SLS propagation is load-bearing; the manuscript must supply the explicit error-bound derivation (including how the corrections interact with non-zero-centered zonotopes) so that soundness can be verified without gaps.
Authors: We agree that an explicit, self-contained derivation is required for independent verification of soundness. In the revised manuscript we will expand the NN-dynamics LEB section (currently summarized in the abstract and the dedicated paragraph) to include the complete step-by-step derivation. This will (i) start from the verifier-generated affine relaxation of the NN, (ii) incorporate the local Jacobian correction term, (iii) propagate the resulting error set through the non-zero-centered zonotope representation, and (iv) show how the combined bound remains a valid over-approximation when fed into the extended SLS propagation. The added material will be placed immediately after the current high-level description so that readers can trace the soundness argument without external references. revision: yes
Circularity Check
No significant circularity; derivation is self-contained algorithmic construction
full rationale
The paper's central claims rest on explicit constructions (path-based Hessian bounds for analytic dynamics; NN verifier affine relaxations plus Jacobian corrections for NN cases) and extensions to an SLS solver for right-invertible disturbances and non-zero-centered zonotopes. These are presented as independent algorithmic steps benchmarked against external baselines, with no equations reducing performance metrics to quantities defined by fitted parameters from the same work, no load-bearing self-citation chains, and no renaming of known results as new derivations. The method preserves formal guarantees through sound LEB propagation without internal reduction to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Dynamics admit bounded Hessians or Lipschitz Jacobians along trajectories (implicit in path-based Hessian bounds).
- domain assumption NN verifiers produce sound affine relaxations (standard in NN verification literature).
Reference graph
Works this paper leans on
-
[1]
Funnel libraries for real-time robust feedback motion planning,
A. Majumdar and R. Tedrake, “Funnel libraries for real-time robust feedback motion planning,”IJRR, vol. 36, no. 8, 2017
2017
-
[2]
Reachability analysis of nonlinear systems using conser- vative polynomialization and non-convex sets,
M. Althoff, “Reachability analysis of nonlinear systems using conser- vative polynomialization and non-convex sets,” inHSCC, 2013
2013
-
[3]
Hamilton-jacobi reachability: A brief overview and recent advances,
S. Bansal, M. Chen, S. Herbert, and C. J. Tomlin, “Hamilton-jacobi reachability: A brief overview and recent advances,” inCDC, 2017
2017
-
[4]
Ro- bust nonlinear optimal control via system level synthesis,
A. Leeman, J. K ¨ohler, A. Zanelli, S. Bennani, and M. Zeilinger, “Ro- bust nonlinear optimal control via system level synthesis,”TAC, 2025
2025
-
[5]
Robust optimal control using set-based reachability analysis,
L. Sch ¨afer and M. Althoff, “Robust optimal control using set-based reachability analysis,” inEur. Control Conf. (ECC). IEEE, 2025
2025
-
[6]
Robust model predictive control for nonlinear discrete-time systems using iterative time-varying constraint tightening,
D. D. Leister and J. P. Koeln, “Robust model predictive control for nonlinear discrete-time systems using iterative time-varying constraint tightening,” inAmerican Control Conference (ACC). IEEE, 2025
2025
-
[7]
Reachability analysis of nonlinear systems with uncertain parameters using conservative linearization,
M. Althoff, O. Stursberg, and M. Buss, “Reachability analysis of nonlinear systems with uncertain parameters using conservative linearization,” inCDC. IEEE, 2008, pp. 4042–4048
2008
-
[8]
System level synthesis,
J. Anderson, J. C. Doyle, S. H. Low, and N. Matni, “System level synthesis,”Annu. Rev. Control., vol. 47, pp. 364–393, 2019
2019
-
[9]
Fast system level synthesis: Robust model predictive control using riccati recursions,
A. P. Leeman, J. Kohler, F. Messerer, A. Lahr, M. Diehl, and M. N. Zeilinger, “Fast system level synthesis: Robust model predictive control using riccati recursions,”IFAC, vol. 58, no. 18, 2024
2024
-
[10]
Safe large-scale robust nonlinear mpc in milliseconds via reachability-constrained system level synthesis on the gpu,
J. Fang and G. Chou, “Safe large-scale robust nonlinear mpc in milliseconds via reachability-constrained system level synthesis on the gpu,” inRobotics: Science and Systems (RSS), 2026
2026
-
[11]
Joint synthesis of trajectory and controlled invariant funnel for discrete-time systems with locally lipschitz nonlinearities,
T. Kim, P. Elango, and B. Ac ¸ıkmes ¸e, “Joint synthesis of trajectory and controlled invariant funnel for discrete-time systems with locally lipschitz nonlinearities,”IJRNC, vol. 34, no. 6, 2024
2024
-
[12]
Robustly constrained dynamic games for uncertain nonlinear dynamics,
S. Zhan, C.-Y . Chiu, A. Leeman, and G. Chou, “Robustly constrained dynamic games for uncertain nonlinear dynamics,” inICRA, 2026
2026
-
[13]
An efficient algorithm for tube-based robust nonlinear optimal control with optimal linear feedback,
F. Messerer and M. Diehl, “An efficient algorithm for tube-based robust nonlinear optimal control with optimal linear feedback,” 2021
2021
-
[14]
Dirtrel: Robust nonlinear direct transcription with ellipsoidal disturbances and lqr feedback,
Z. Manchester and S. Kuindersma, “Dirtrel: Robust nonlinear direct transcription with ellipsoidal disturbances and lqr feedback,” 2017
2017
-
[15]
An approximation technique for robust nonlinear optimization,
M. Diehl, H. G. Bock, and E. Kostina, “An approximation technique for robust nonlinear optimization,”Math. Prog., vol. 107, no. 1, 2006
2006
-
[16]
Robust optimization of nonlinear dynamic systems with application to a jacketed tubular reactor,
B. Houska, F. Logist, J. Van Impe, and M. Diehl, “Robust optimization of nonlinear dynamic systems with application to a jacketed tubular reactor,”Journal of Process Control, vol. 22, no. 6, 2012
2012
-
[17]
Robust mpc via min–max differential inequalities,
M. Villanueva, R. Quirynen, M. Diehl, B. Chachuat, and B. Houska, “Robust mpc via min–max differential inequalities,”Automatica, 2017
2017
-
[18]
Successive linearization nmpc for a class of stochastic nonlinear systems,
M. Cannon, D. Ng, and B. Kouvaritakis, “Successive linearization nmpc for a class of stochastic nonlinear systems,” inNMPC, 2009
2009
-
[19]
Robust tubes in nonlinear model predictive control,
M. Cannon, J. Buerger, B. Kouvaritakis, and S. Rakovic, “Robust tubes in nonlinear model predictive control,”TAC, vol. 56, no. 8, 2011
2011
-
[20]
Robust model predictive control for time-varying systems,
A. Richards, “Robust model predictive control for time-varying systems,” inCDC. IEEE, 2005, pp. 3747–3752
2005
-
[21]
Accurate reachability analysis of uncertain nonlinear systems,
M. Rungger and M. Zamani, “Accurate reachability analysis of uncertain nonlinear systems,” inHSCC, 2018, pp. 61–70
2018
-
[22]
Robust mpc of constrained nonlinear systems based on interval arithmetic,
D. Limon, J. Bravo, T. Alamo, and E. Camacho, “Robust mpc of constrained nonlinear systems based on interval arithmetic,”IEE Proceedings-Control Theory and Applications, vol. 152, no. 3, 2005
2005
-
[23]
Parallel differentiable reachability for learning and planning with certified neural dynamics and controllers,
K. Shen and G. Chou, “Parallel differentiable reachability for learning and planning with certified neural dynamics and controllers,” in Robotics: Science and Systems (RSS), 2026
2026
-
[24]
immrax: A parallelizable and differentiable toolbox for interval analysis and mixed monotone reachability in jax,
A. Harapanahalli, S. Jafarpour, and S. Coogan, “immrax: A parallelizable and differentiable toolbox for interval analysis and mixed monotone reachability in jax,”ADHS, vol. 58, no. 11, 2024
2024
-
[25]
A linear differential inclusion for contraction analysis to known trajectories,
A. Harapanahalli and S. Coogan, “A linear differential inclusion for contraction analysis to known trajectories,”IEEE TAC, 2025
2025
-
[26]
Efficient neural network robustness certification with general activation functions,
H. Zhang, T.-W. Weng, P.-Y . Chen, C.-J. Hsieh, and L. Daniel, “Efficient neural network robustness certification with general activation functions,”NeurIPS, vol. 31, 2018
2018
-
[27]
Automatic perturbation analysis for scalable certified robustness and beyond,
K. Xu, Z. Shi, H. Zhang, Y . Wang, K.-W. Chang, M. Huang, B. Kailkhura, X. Lin, and C.-J. Hsieh, “Automatic perturbation analysis for scalable certified robustness and beyond,”NeurIPS, 2020
2020
-
[28]
Certified gradient-based contact-rich manipulation via smoothing-error reachable tubes,
W.-C. Li and G. Chou, “Certified gradient-based contact-rich manipulation via smoothing-error reachable tubes,” inRobotics: Science and Systems (RSS), 2026
2026
-
[29]
An introduction to CORA 2015,
M. Althoff, “An introduction to CORA 2015,” inWorkshop on Applied Verification for Continuous and Hybrid Systems, 2015
2015
-
[30]
Robust adaptive mpc using control contraction metrics,
A. Sasfi, M. N. Zeilinger, and J. K ¨ohler, “Robust adaptive mpc using control contraction metrics,”Automatica, vol. 155, p. 111169, 2023
2023
-
[31]
Safety beyond the training data: Robust out-of-distribution mpc via conformalized system level synthesis,
A. Srinivasan, A. Leeman, and G. Chou, “Safety beyond the training data: Robust out-of-distribution mpc via conformalized system level synthesis,”Learning for Dynamics and Control (L4DC), 2026
2026
-
[32]
D. Nath, A. Srinivasan, H. Yin, R. Jiang, J. Fang, and G. Chou, “Pixels to proofs: Probabilistically-safe latent world model control via parallel conformal robust mpc,”arXiv preprint arXiv:2606.15594, 2026
-
[33]
Vision-sls: Safe perception-based control from learned visual representations via system level synthesis,
A. P. Leeman, S. Zhan, M. N. Zeilinger, and G. Chou, “Vision-sls: Safe perception-based control from learned visual representations via system level synthesis,”Robotics: Science and Systems (RSS), 2026
2026
-
[34]
Safe control of partially-observed linear time-varying systems with minimal worst-case dynamic regret,
H. Zhou and V . Tzoumas, “Safe control of partially-observed linear time-varying systems with minimal worst-case dynamic regret,” in 2023 62nd IEEE Conference on Decision and Control (CDC). IEEE, 2023, pp. 8781–8787
2023
-
[35]
W.-C. Li, J. Fang, S. Polisetti, Y . Song, and G. Chou, “Robustness without wrinkles: Parallel simulation and robust mpc for certified deformable manipulation,”arXiv preprint arXiv:2606.14188, 2026. APPENDIX In the appendix, we first discuss details on the system dynamics used in the experimental results (App. I). We then provide an algorithm block descri...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.