Physics-Informed Eikonal Caging for Whole-Arm Manipulation Planning
Pith reviewed 2026-06-26 11:39 UTC · model grok-4.3
The pith
Reformulating caging as a minimum-time escape problem produces an escape-time field that obeys an eikonal equation and can be learned with a physics-informed neural network for manipulation planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
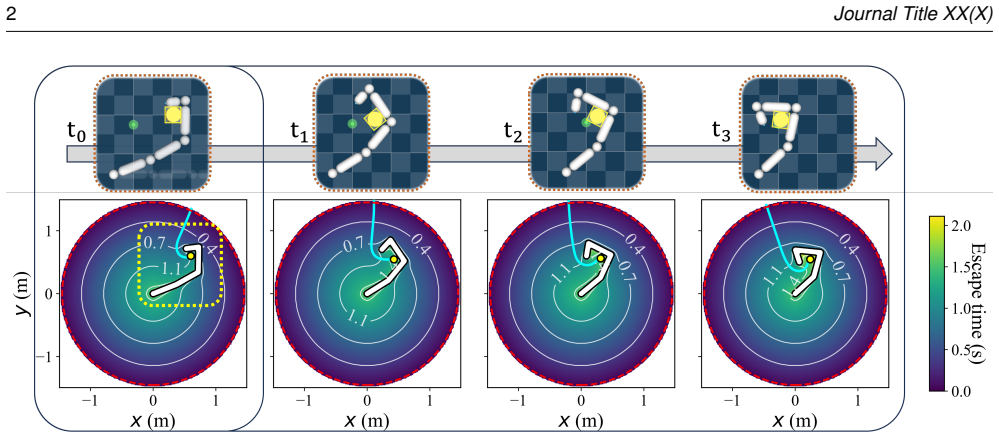
Caging is reformulated as a minimum-time escape problem under the robot's enclosing geometry. The resulting escape-time field measures enclosure quality, satisfies an eikonal equation, and is approximated by a physics-informed neural network to yield a differentiable representation for embedding into continuous optimization-based manipulation planning.
What carries the argument
The escape-time field from the minimum-time escape problem, which satisfies the eikonal equation and is approximated via a physics-informed neural network to provide a differentiable enclosure metric.
If this is right
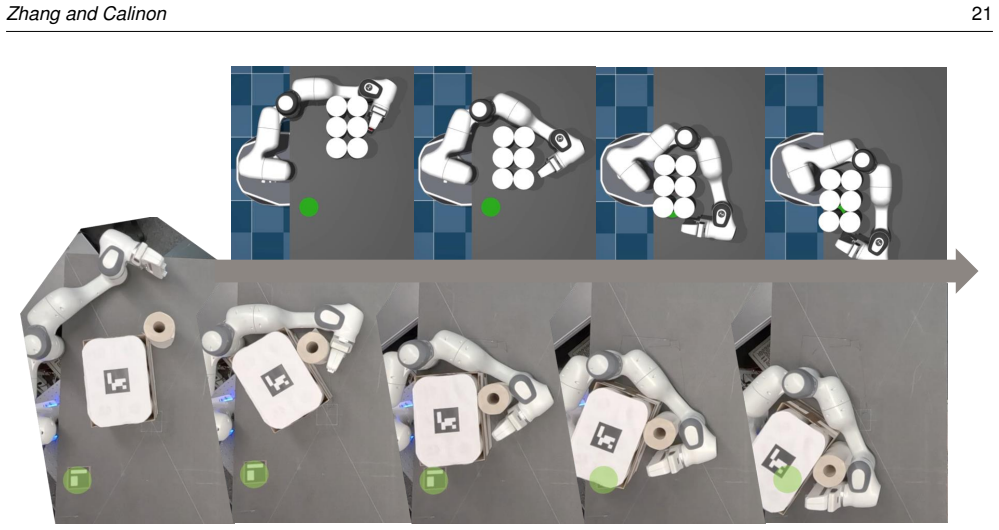
- Whole-arm manipulation planners can optimize directly for configurations that resist object escape using the differentiable field.
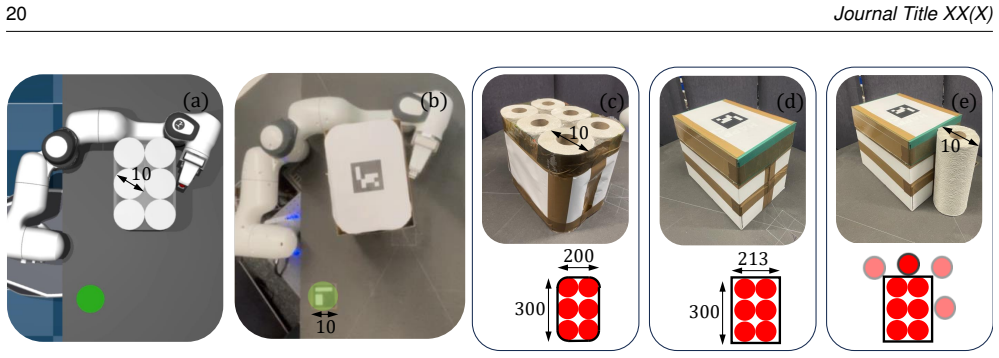
- Simplified contact models such as quasi-dynamic approximations become viable for planning without sacrificing robustness.
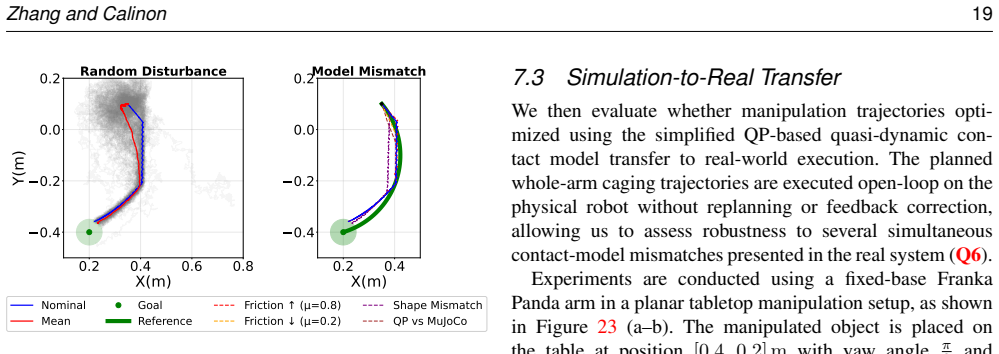
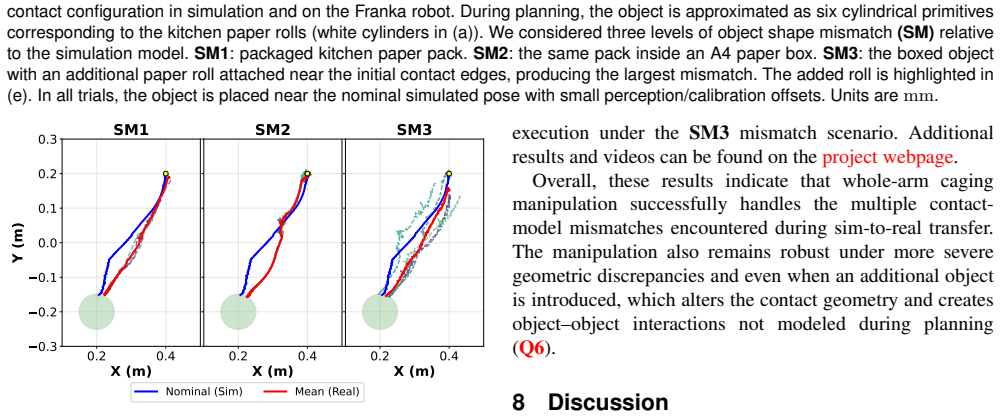
- Improved resistance to disturbances and contact-model mismatch is achieved in both simulation and real-world tests compared to baselines.
- Geometric enclosure acts as a practical robustness primitive for contact-rich whole-arm manipulation.
Where Pith is reading between the lines
- The approach may generalize to other enclosure-based tasks like containment or guarding in robotics.
- Connections to traditional path-planning methods using eikonal equations could allow hybrid planning strategies.
- Further validation with varying object shapes and dynamic environments would test the limits of the enclosure metric.
- Embedding the field into learning-based controllers could enable online adjustment during execution.
Load-bearing premise
That solving the minimum-time escape problem under the robot geometry accurately captures the robustness of caging to inaccuracies in contact models.
What would settle it
A real-robot experiment in which a planned manipulation using the escape-time objective fails under actual contact while a non-caging baseline succeeds would falsify the claim that the field provides the intended robustness.
Figures
read the original abstract
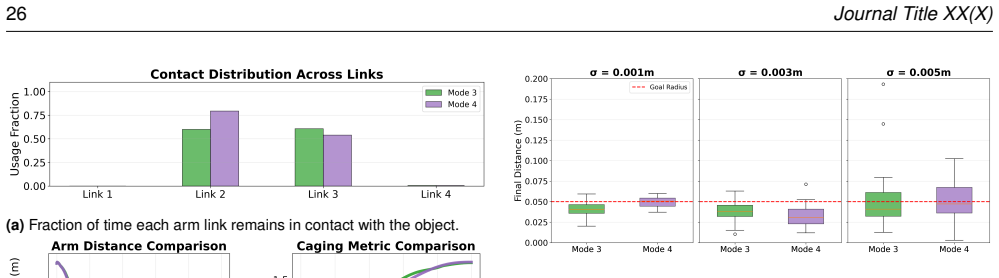
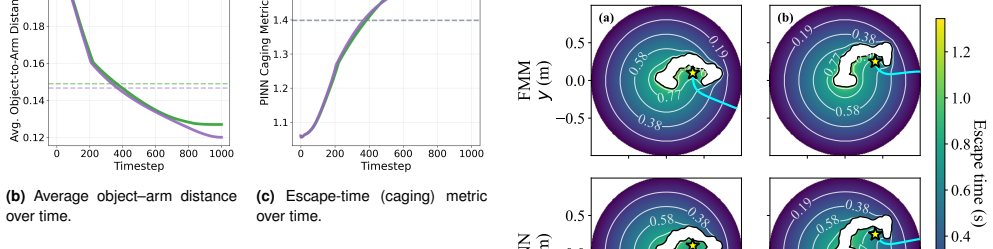
Planning contact-rich whole-arm manipulation is challenging because interactions that involve extended robot geometry give rise to complex contact dynamics that are difficult to model accurately. This creates a need for planning principles that do not rely heavily on precise contact models. Caging offers one such geometric notion of robustness to modeling inaccuracy by restricting object escape through geometrically enclosing the object. However, existing caging formulations are difficult to incorporate into continuous optimization-based manipulation planning. We reformulate caging as a minimum-time escape problem in which the object seeks to leave an enclosing robot geometry in the shortest time. This yields a continuous escape-time field that measures the robot's enclosure quality and we show it satisfies an eikonal equation. We therefore can approximate this field using a physics-informed neural network, producing a smooth differentiable representation that can be embedded directly into manipulation planning. The resulting objective supports whole-arm manipulation planning to favor robot configurations resisting object escape. This improves the manipulation robustness to contact model mismatch, thus enabling planning with simplified contact models, including quasi-dynamic approximations and simplified object geometry. Across simulation and real-world experiments, we show improved robustness to disturbances and contact-model mismatch relative to baselines. These results suggest that geometric enclosure can serve as a practical robustness primitive for whole-arm manipulation. A supplementary video, which includes an intuitive overview of our method and experiment video results, is available on our project webpage.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reformulates caging for whole-arm manipulation as a minimum-time escape problem for an object leaving the robot's enclosing geometry. It asserts that the resulting escape-time field satisfies the eikonal equation, approximates the field via a physics-informed neural network (PINN) to obtain a smooth differentiable representation, and embeds this field as an objective in continuous manipulation planning. The approach is claimed to improve robustness to contact-model mismatch, enabling use of simplified models (e.g., quasi-dynamic), with supporting simulation and real-robot experiments.
Significance. If the escape-time-to-robustness mapping is valid, the method supplies a geometric, model-light primitive that can be directly differentiated and optimized within existing planners. This addresses a practical gap in contact-rich whole-arm tasks where accurate dynamics are unavailable. The PINN-based eikonal approximation is a clean way to obtain the required smoothness without discretizing the configuration space.
major comments (2)
- [Abstract] Abstract and opening paragraphs: the central claim that the min-time escape field under idealized enclosing geometry quantifies robustness to contact-model mismatch (friction, compliance, multi-contact dynamics) is asserted without an explicit argument or counter-example analysis showing why this geometric quantity dominates unmodeled effects that could permit escape even when the field value is large. This mapping is load-bearing for the practical utility of the planning objective.
- [Abstract / Methods] The abstract states that the escape-time field satisfies the eikonal equation and that a PINN is used to approximate it, yet supplies no derivation steps, boundary-condition enforcement details (T=0 on boundary, | abla T|=1 inside), or error analysis for the PINN training. Because the eikonal property is the justification for using the PINN inside the planner, this omission affects assessment of the method's soundness.
minor comments (1)
- Notation for the escape-time field T and the enclosing geometry should be introduced with a single consistent definition early in the manuscript rather than piecemeal.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our contributions. We address each major comment below with specific responses and proposed revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract and opening paragraphs: the central claim that the min-time escape field under idealized enclosing geometry quantifies robustness to contact-model mismatch (friction, compliance, multi-contact dynamics) is asserted without an explicit argument or counter-example analysis showing why this geometric quantity dominates unmodeled effects that could permit escape even when the field value is large. This mapping is load-bearing for the practical utility of the planning objective.
Authors: We agree that an explicit argument linking the escape-time field to robustness against contact-model mismatch would strengthen the manuscript. The underlying intuition is that a large escape time under the idealized enclosing geometry implies the object must traverse a long path in configuration space to escape, providing a temporal buffer even if unmodeled effects (e.g., reduced friction or compliance) alter the actual dynamics. In the revision we will add a dedicated paragraph in the introduction that formalizes this reasoning and includes a simple counter-example: two robot configurations with identical contact models but differing escape times, showing that the higher escape-time configuration maintains enclosure under perturbed friction coefficients where the lower one fails. This addition will make the load-bearing claim more transparent without altering the core method. revision: yes
-
Referee: [Abstract / Methods] The abstract states that the escape-time field satisfies the eikonal equation and that a PINN is used to approximate it, yet supplies no derivation steps, boundary-condition enforcement details (T=0 on boundary, |∇T|=1 inside), or error analysis for the PINN training. Because the eikonal property is the justification for using the PINN inside the planner, this omission affects assessment of the method's soundness.
Authors: The derivation that the minimum-time escape problem yields the eikonal equation (with T=0 on the boundary and |∇T|=1 in the free space) appears in Section III-B of the manuscript, along with the PINN loss formulation that enforces these conditions via the PDE residual. However, the abstract and early sections do not recap these steps. In the revision we will insert a concise derivation outline (one paragraph) into the introduction immediately after the problem statement, explicitly stating the boundary condition and the |∇T|=1 interior condition. We will also add a short error analysis subsection in the experiments (including L2 residual norms on a held-out grid and maximum pointwise error) to quantify PINN accuracy and support the claim that the approximation is sufficiently faithful for use inside the planner. revision: yes
Circularity Check
No circularity: derivation relies on external PDE and experimental validation
full rationale
The paper defines caging via a min-time escape reformulation (a modeling choice), notes that the resulting field satisfies the eikonal equation by the standard Hamilton-Jacobi property of unit-speed escape (external fact), approximates it with a PINN (standard technique whose loss is independent of the planning objective), and embeds the field into an optimization cost. Robustness to contact mismatch is asserted as an empirical outcome validated in simulation and hardware experiments rather than derived by construction from any fitted parameter or self-citation. No load-bearing step reduces to a definitional equivalence or internal fit.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math The minimum-time escape function under enclosing robot geometry satisfies the eikonal equation.
- domain assumption Geometric enclosure quality measured by escape time provides robustness to contact-model inaccuracy.
Reference graph
Works this paper leans on
-
[1]
and Pokorny, Florian T
Stork, Johannes A. and Pokorny, Florian T. and Kragic, Danica , booktitle =. A Topology-based Object Representation for Clasping, Latching and Hooking , year =
-
[2]
and Toussaint, Marc and Kragic, Danica , booktitle =
Zarubin, Dmitry and Pokorny, Florian T. and Toussaint, Marc and Kragic, Danica , booktitle =. Caging Complex Objects with Geodesic Balls , year =
-
[3]
and Stork, Johannes A
Pokorny, Florian T. and Stork, Johannes A. and Kragic, Danica , booktitle =. Grasping Objects with Holes: A Topological Approach , year =
-
[4]
and Pokorny, Florian T
Stork, Johannes A. and Pokorny, Florian T. and Kragic, Danica , booktitle =. Integrated Motion and Clasp Planning with Virtual Linking , year =
-
[5]
Proceedings of IEEE International Conference on Robotics and Automation , volume=
Caging 2D bodies by 1-parameter two-fingered gripping systems , author=. Proceedings of IEEE International Conference on Robotics and Automation , volume=. 1996 , organization=
1996
-
[6]
IEEE Transactions on Robotics , year=
Simultaneous trajectory optimization and contact selection for contact-rich manipulation with high-fidelity geometry , author=. IEEE Transactions on Robotics , year=
-
[7]
The International Journal of Robotics Research , volume=
From caging to grasping , author=. The International Journal of Robotics Research , volume=. 2012 , publisher=
2012
-
[8]
Autonomous Robots , volume=
Herding by caging: a formation-based motion planning framework for guiding mobile agents , author=. Autonomous Robots , volume=. 2021 , publisher=
2021
-
[9]
The international journal of robotics research , volume=
Free space of rigid objects: Caging, path non-existence, and narrow passage detection , author=. The international journal of robotics research , volume=. 2021 , publisher=
2021
-
[10]
2015 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Robust three-finger three-parameter caging of convex polygons , author=. 2015 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2015 , organization=
2015
-
[11]
IEEE Transactions on Automation Science and Engineering , volume=
Equilateral three-finger caging of polygonal objects using contact space search , author=. IEEE Transactions on Automation Science and Engineering , volume=. 2018 , publisher=
2018
-
[12]
2013 IEEE International Conference on Robotics and Automation , pages=
Measurement framework of partial cage quality based on probabilistic motion planning , author=. 2013 IEEE International Conference on Robotics and Automation , pages=. 2013 , organization=
2013
-
[13]
2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Partial caging: A clearance-based definition and deep learning , author=. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2019 , organization=
2019
-
[14]
IEEE Robotics and Automation Letters , volume=
Energy-bounded caging: Formal definition and 2-D energy lower bound algorithm based on weighted alpha shapes , author=. IEEE Robotics and Automation Letters , volume=. 2016 , publisher=
2016
-
[15]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Quasi-static soft fixture analysis of rigid and deformable objects , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[16]
IEEE Robotics and Automation Letters , volume=
Characterizing manipulation robustness through energy margin and caging analysis , author=. IEEE Robotics and Automation Letters , volume=
-
[17]
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Cagecoopt: enhancing manipulation robustness through caging-guided morphology and policy co-optimization , author=. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2025 , organization=
2025
-
[18]
2026 IEEE International Conference on Robotics and Automation (ICRA) , year=
Robustness-Aware Tool Selection and Manipulation Planning with Learned Energy-Informed Guidance , author=. 2026 IEEE International Conference on Robotics and Automation (ICRA) , year=
2026
-
[19]
LaValle, Steven M. and Hutchinson, Seth A. , year=. The International Journal of Robotics Research , publisher=. doi:10.1177/027836499801700104 , number=
-
[20]
Algorithmica , volume=
Robot motion planning: A game-theoretic foundation , author=. Algorithmica , volume=. 2000 , publisher=
2000
-
[21]
2016 , school=
A tensor-train-decomposition-based algorithm for high-dimensional pursuit-evasion games , author=. 2016 , school=
2016
-
[22]
2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids) , pages=
Explicit contact optimization in whole-body contact-rich manipulation , author=. 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids) , pages=. 2024 , organization=
2024
-
[24]
The International Journal of Robotics Research , volume=
ASIMO: Agent-centric scene representation in multi-object manipulation , author=. The International Journal of Robotics Research , volume=. 2025 , publisher=
2025
-
[25]
2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Cost-to-go function generating networks for high dimensional motion planning , author=. 2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2021 , organization=
2021
-
[26]
Learning Continuous Environment Fields via Implicit Functions , author=
-
[27]
The Eleventh International Conference on Learning Representations , year=
NTFields: Neural Time Fields for Physics-Informed Robot Motion Planning , author=. The Eleventh International Conference on Learning Representations , year=
-
[28]
RSS 2023 Workshop on Symmetries in Robot Learning , year=
Progressive Learning for Physics-informed Neural Motion Planning , author=. RSS 2023 Workshop on Symmetries in Robot Learning , year=
2023
-
[29]
IEEE Robotics and Automation Letters , volume=
Grasp multiple objects with one hand , author=. IEEE Robotics and Automation Letters , volume=. 2024 , publisher=
2024
-
[30]
7th Annual Conference on Robot Learning , year=
Predicting object interactions with behavior primitives: An application in stowing tasks , author=. 7th Annual Conference on Robot Learning , year=
-
[32]
, author=
A fast marching level set method for monotonically advancing fronts. , author=. proceedings of the National Academy of Sciences , volume=
-
[33]
SIAM Journal on Numerical Analysis , volume=
Anisotropic fast-marching on cartesian grids using lattice basis reduction , author=. SIAM Journal on Numerical Analysis , volume=. 2014 , publisher=
2014
-
[34]
Iberoamerican Congress on Pattern Recognition , pages=
Sub-Riemannian fast marching in SE (2) , author=. Iberoamerican Congress on Pattern Recognition , pages=. 2015 , organization=
2015
-
[35]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
A new finsler minimal path model with curvature penalization for image segmentation and closed contour detection , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[36]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Representing robot geometry as distance fields: Applications to whole-body manipulation , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[37]
Conference on robot learning , pages=
Learning models as functionals of signed-distance fields for manipulation planning , author=. Conference on robot learning , pages=. 2022 , organization=
2022
-
[38]
SIAM Journal on Scientific Computing , volume=
Causal domain restriction for Eikonal equations , author=. SIAM Journal on Scientific Computing , volume=. 2014 , publisher=
2014
-
[39]
Mathematical Programming , volume=
Optimization-based simulation of nonsmooth rigid multibody dynamics , author=. Mathematical Programming , volume=. 2006 , publisher=
2006
-
[41]
IEEE Transactions on robotics , volume=
Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models , author=. IEEE Transactions on robotics , volume=. 2023 , publisher=
2023
-
[42]
2012 IEEE/RSJ international conference on intelligent robots and systems , pages=
Mujoco: A physics engine for model-based control , author=. 2012 IEEE/RSJ international conference on intelligent robots and systems , pages=. 2012 , organization=
2012
-
[43]
VP-STO: Via-point-based Stochastic Trajectory Optimization for Reactive Robot Behavior , year=
Jankowski, Julius and Brudermüller, Lara and Hawes, Nick and Calinon, Sylvain , booktitle=. VP-STO: Via-point-based Stochastic Trajectory Optimization for Reactive Robot Behavior , year=
-
[44]
arXiv preprint arXiv:2212.00541 , year=
Predictive sampling: Real-time behaviour synthesis with mujoco , author=. arXiv preprint arXiv:2212.00541 , year=
-
[45]
and Chi, X
Li, Y. and Chi, X. and Razmjoo, A. and Calinon, S. , title=. Proc.\ Robotics: Science and Systems (
-
[46]
arXiv preprint arXiv:2412.05197 , year=
A Riemannian take on distance fields and geodesic flows in robotics , author=. arXiv preprint arXiv:2412.05197 , year=
-
[47]
IEEE Robotics and Automation Letters , volume=
Neural joint space implicit signed distance functions for reactive robot manipulator control , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[48]
Science Robotics , volume=
Complex manipulation with a simple robotic hand through contact breaking and caging , author=. Science Robotics , volume=. 2021 , publisher=
2021
-
[49]
The International Journal of Robotics Research , volume=
Certified grasping , author=. The International Journal of Robotics Research , volume=. 2023 , publisher=
2023
-
[50]
The International Journal of Robotics Research , pages=
Caging in time: A framework for robust object manipulation under uncertainties and limited robot perception , author=. The International Journal of Robotics Research , pages=. 2025 , publisher=
2025
-
[51]
2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids) , pages=
Scaling whole-body multi-contact manipulation with contact optimization , author=. 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids) , pages=. 2025 , organization=
2025
-
[52]
Science Robotics , volume=
Learning contact-rich whole-body manipulation with example-guided reinforcement learning , author=. Science Robotics , volume=. 2025 , publisher=
2025
-
[53]
Advanced Robotics , volume=
A survey of robotic caging and its applications , author=. Advanced Robotics , volume=. 2017 , publisher=
2017
-
[54]
The International Journal of Robotics Research , pages=
Robust pushing: Exploiting quasi-static belief dynamics and contact-informed optimization , author=. The International Journal of Robotics Research , pages=. 2025 , publisher=
2025
-
[55]
2017 IEEE-RAS 17th international conference on humanoid robotics (Humanoids) , pages=
Approximate hybrid model predictive control for multi-contact push recovery in complex environments , author=. 2017 IEEE-RAS 17th international conference on humanoid robotics (Humanoids) , pages=. 2017 , organization=
2017
-
[56]
The International Journal of Robotics Research , volume=
Reactive planar non-prehensile manipulation with hybrid model predictive control , author=. The International Journal of Robotics Research , volume=. 2020 , publisher=
2020
-
[57]
The International Journal of Robotics Research , volume=
A direct method for trajectory optimization of rigid bodies through contact , author=. The International Journal of Robotics Research , volume=. 2014 , publisher=
2014
-
[58]
2022 International Conference on Robotics and Automation (ICRA) , pages=
Non-prehensile planar manipulation via trajectory optimization with complementarity constraints , author=. 2022 International Conference on Robotics and Automation (ICRA) , pages=. 2022 , organization=
2022
-
[59]
The International Journal of Robotics Research , volume=
Inverse dynamics trajectory optimization for contact-implicit model predictive control , author=. The International Journal of Robotics Research , volume=. 2026 , publisher=
2026
-
[60]
2017 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=
Domain randomization for transferring deep neural networks from simulation to the real world , author=. 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS) , pages=. 2017 , organization=
2017
-
[61]
Conference on Robot Learning , pages=
Domain randomization for simulation-based policy optimization with transferability assessment , author=. Conference on Robot Learning , pages=. 2018 , organization=
2018
-
[62]
2018 IEEE international conference on robotics and automation (ICRA) , pages=
Using simulation and domain adaptation to improve efficiency of deep robotic grasping , author=. 2018 IEEE international conference on robotics and automation (ICRA) , pages=. 2018 , organization=
2018
-
[63]
2020 IEEE international conference on robotics and automation (ICRA) , pages=
Meta reinforcement learning for sim-to-real domain adaptation , author=. 2020 IEEE international conference on robotics and automation (ICRA) , pages=. 2020 , organization=
2020
-
[64]
The International Journal of Robotics Research , pages=
Robust contact-rich manipulation through implicit motor adaptation , author=. The International Journal of Robotics Research , pages=. 2024 , publisher=
2024
-
[65]
The International Journal of Robotics Research , pages=
Dexterous contact-rich manipulation via the contact trust region , author=. The International Journal of Robotics Research , pages=. 2025 , publisher=
2025
-
[67]
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Minimax iterative dynamic game: Application to nonlinear robot control tasks , author=. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2018 , organization=
2018
-
[68]
2019 American Control Conference (ACC) , pages=
Robust kinodynamic motion planning using model-free game-theoretic learning , author=. 2019 American Control Conference (ACC) , pages=. 2019 , organization=
2019
-
[69]
2022 International Conference on Robotics and Automation (ICRA) , pages=
Robust reinforcement learning via genetic curriculum , author=. 2022 International Conference on Robotics and Automation (ICRA) , pages=. 2022 , organization=
2022
-
[71]
Proc.\ Robotics: Science and Systems (
Shi, Fan and Zhang, Chong and Miki, Takahiro and Lee, Joonho and Hutter, Marco and Coros, Stelian , title=. Proc.\ Robotics: Science and Systems (
-
[72]
2015 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Nonprehensile whole arm rearrangement planning on physics manifolds , author=. 2015 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2015 , organization=
2015
-
[73]
Advances in neural information processing systems , volume=
Incorporating second-order functional knowledge for better option pricing , author=. Advances in neural information processing systems , volume=
-
[74]
and Qiu, J
Li, Y. and Qiu, J. and Calinon, S. , title=. International Journal of Robotics Research (
-
[75]
The International Journal of Robotics Research 42(4-5): 249--262
Aceituno-Cabezas B, Ballester J and Rodriguez A (2023) Certified grasping. The International Journal of Robotics Research 42(4-5): 249--262
2023
-
[76]
In: 2015 IEEE International Conference on Robotics and Automation (ICRA)
Allen TF, Rimon E and Burdick JW (2015) Robust three-finger three-parameter caging of convex polygons. In: 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, pp. 4318--4325
2015
-
[77]
Mathematical Programming 105(1): 113--143
Anitescu M (2006) Optimization-based simulation of nonsmooth rigid multibody dynamics. Mathematical Programming 105(1): 113--143
2006
-
[78]
In: 2020 IEEE international conference on robotics and automation (ICRA)
Arndt K, Hazara M, Ghadirzadeh A and Kyrki V (2020) Meta reinforcement learning for sim-to-real domain adaptation. In: 2020 IEEE international conference on robotics and automation (ICRA). IEEE, pp. 2725--2731
2020
-
[79]
O nol A \
Barreiros JA, \"O nol A \"O , Zhang M, Creasey S, Goncalves A, Beaulieu A, Bhat A, Tsui KM and Alspach A (2025) Learning contact-rich whole-body manipulation with example-guided reinforcement learning. Science Robotics 10(105): eads6790
2025
-
[80]
Science Robotics 6(54): eabd2666
Bircher WG, Morgan AS and Dollar AM (2021) Complex manipulation with a simple robotic hand through contact breaking and caging. Science Robotics 6(54): eabd2666
2021
-
[81]
(2018) Using simulation and domain adaptation to improve efficiency of deep robotic grasping
Bousmalis K, Irpan A, Wohlhart P, Bai Y, Kelcey M, Kalakrishnan M, Downs L, Ibarz J, Pastor P, Konolige K et al. (2018) Using simulation and domain adaptation to improve efficiency of deep robotic grasping. In: 2018 IEEE international conference on robotics and automation (ICRA). IEEE, pp. 4243--4250
2018
-
[82]
IEEE Transactions on Automation Science and Engineering 15(3): 919--931
Bunis HA, Rimon ED, Allen TF and Burdick JW (2018) Equilateral three-finger caging of polygonal objects using contact space search. IEEE Transactions on Automation Science and Engineering 15(3): 919--931
2018
-
[83]
In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
Chen D, Mirebeau JM and Cohen LD (2016) A new finsler minimal path model with curvature penalization for image segmentation and closed contour detection. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. pp. 355--363
2016
-
[84]
arXiv preprint arXiv:2511.05809
Chen Y, He B, Mao Y, Jakobsson A, Ke J, Aloimonos Y, Shi G, Choset H, Mao J and Ichnowski J (2025) Adversarial game-theoretic algorithm for dexterous grasp synthesis. arXiv preprint arXiv:2511.05809
-
[85]
SIAM Journal on Scientific Computing 36(5): A2478--A2505
Clawson Z, Chacon A and Vladimirsky A (2014) Causal domain restriction for eikonal equations. SIAM Journal on Scientific Computing 36(5): A2478--A2505
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.