REVIEW 1 major objections 1 minor 24 references
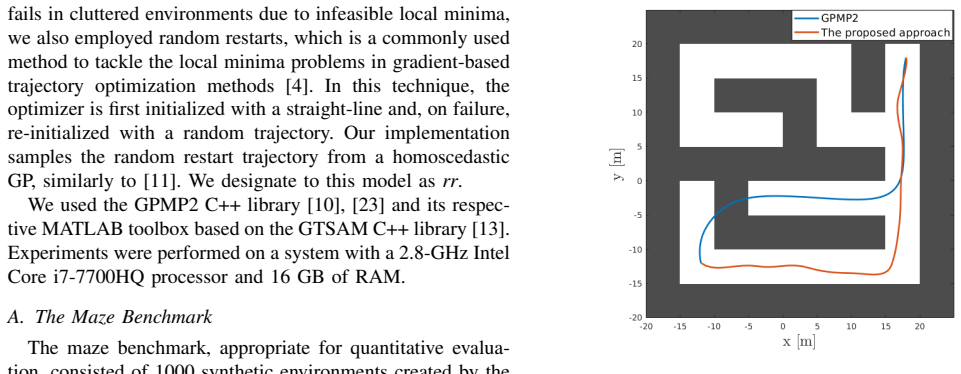
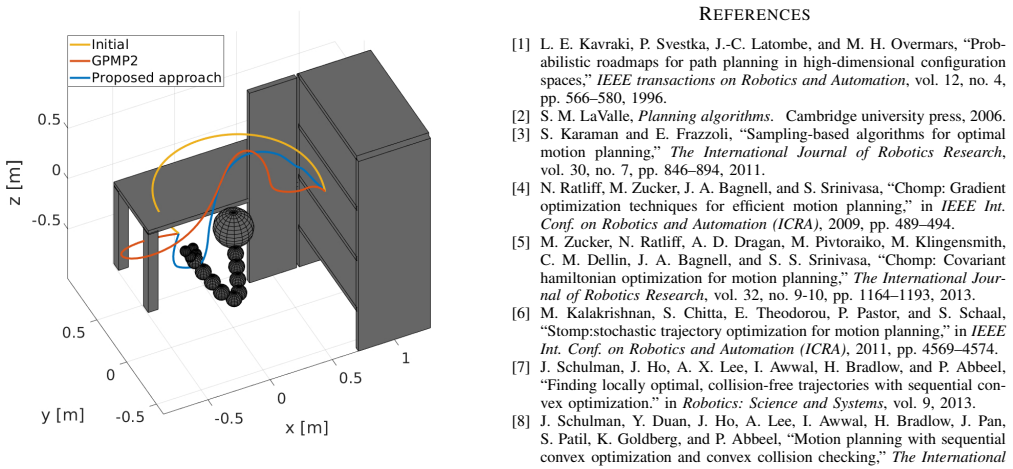
Introducing heteroscedasticity into Gaussian process trajectory priors and using cross-entropy stochastic optimization produces motion plans that succeed more often in cluttered environments than GPMP2.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · grok-4.3
2026-05-24 20:21 UTC pith:AWENP6XE
load-bearing objection The experiments compare to GPMP2 but do not isolate whether the reported gains come from heteroscedasticity or from switching to the cross-entropy optimizer. the 1 major comments →
Stochastic Optimization for Trajectory Planning with Heteroscedastic Gaussian Processes
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Trajectories represented as samples from a heteroscedastic continuous-time Gaussian process can be optimized stochastically with the cross-entropy method to achieve more thorough exploration of the solution space and higher success rates in complex environments than GPMP2 while maintaining comparable execution time.
What carries the argument
Heteroscedastic continuous-time Gaussian process priors optimized via the cross-entropy method.
Load-bearing premise
That the heteroscedastic Gaussian process model creates trajectory priors better suited for avoiding collisions than standard models.
What would settle it
A controlled comparison where the same stochastic optimizer is run once with heteroscedastic priors and once with homoscedastic priors, showing no difference in success rate, would falsify the value of the heteroscedasticity.
If this is right
- The stochastic search avoids many local minima that trap gradient-based methods.
- Trajectory priors become more suitable for collision avoidance due to varying variance.
- Success rates increase in cluttered scenes without increasing runtime significantly.
- Planning remains efficient for high degree-of-freedom robots.
Where Pith is reading between the lines
- Similar stochastic optimization could be applied to other continuous representations beyond Gaussian processes.
- The approach might scale to online replanning if variance schedules can be learned from data.
- Testing in dynamic environments would reveal whether the priors adapt well to moving obstacles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a motion planning algorithm that represents trajectories as samples from a continuous-time heteroscedastic Gaussian process and optimizes them via the cross-entropy method (CEM) to mitigate local minima issues in cluttered environments. It claims this yields more thorough solution-space exploration and higher success rates than the GPMP2 baseline while maintaining comparable runtime.
Significance. If the attribution of gains to heteroscedasticity holds after proper controls, the work would strengthen the case for stochastic optimizers paired with uncertainty-aware priors in GP-based trajectory optimization, addressing a recognized weakness of gradient methods like GPMP2 in complex scenes. The approach builds directly on established GPMP2 and CEM techniques without introducing circularity.
major comments (1)
- [Experimental Evaluation] Experimental section (and abstract claim): the only baseline is GPMP2, which differs simultaneously in the GP model (homoscedastic vs. heteroscedastic) and the optimizer (gradient descent vs. CEM). No ablation compares the proposed heteroscedastic GP+CEM against a homoscedastic GP+CEM variant, so performance differences cannot be attributed specifically to heteroscedasticity rather than the optimizer change.
minor comments (1)
- [Abstract and Experiments] The abstract and experimental description mention 'higher success rate' and 'comparable execution time' but provide no quantitative metrics, environment details, or statistical significance tests; these should be expanded for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on our experimental design. We agree that the current comparison does not isolate the effect of heteroscedasticity from the optimizer change, and we will revise the manuscript to include the requested ablation.
read point-by-point responses
-
Referee: [Experimental Evaluation] Experimental section (and abstract claim): the only baseline is GPMP2, which differs simultaneously in the GP model (homoscedastic vs. heteroscedastic) and the optimizer (gradient descent vs. CEM). No ablation compares the proposed heteroscedastic GP+CEM against a homoscedastic GP+CEM variant, so performance differences cannot be attributed specifically to heteroscedasticity rather than the optimizer change.
Authors: We agree that the present experiments compare two methods that differ in both the GP prior and the optimizer, preventing direct attribution of gains to heteroscedasticity alone. We will add an ablation that fixes the optimizer to CEM and varies only the GP model (homoscedastic vs. heteroscedastic). The new results, together with updated discussion and abstract language, will clarify the contribution of each component. We will also report the additional runtime for the ablation to maintain the claim of comparable execution time. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces heteroscedastic GP priors as a modeling choice and combines them with the cross-entropy method for stochastic optimization, building on GPMP2 as an external baseline. No equations reduce by construction to fitted inputs, no self-definitional loops, and no load-bearing self-citations that render the central claim tautological. The experimental comparison to GPMP2 is independent of the derivation itself. This is the expected honest non-finding for a methods paper that does not rename known results or smuggle ansatzes via self-citation.
Axiom & Free-Parameter Ledger
free parameters (1)
- heteroscedastic parameters
axioms (2)
- domain assumption Continuous-time Gaussian processes can represent robot trajectories effectively
- domain assumption The cross-entropy method can be applied to optimize over GP trajectory samples
read the original abstract
Trajectory optimization methods for motion planning attempt to generate trajectories that minimize a suitable objective function. Such methods efficiently find solutions even for high degree-of-freedom robots. However, a globally optimal solution is often intractable in practice and state-of-the-art trajectory optimization methods are thus prone to local minima, especially in cluttered environments. In this paper, we propose a novel motion planning algorithm that employs stochastic optimization based on the cross-entropy method in order to tackle the local minima problem. We represent trajectories as samples from a continuous-time Gaussian process and introduce heteroscedasticity to generate powerful trajectory priors better suited for collision avoidance in motion planning problems. Our experimental evaluation shows that the proposed approach yields a more thorough exploration of the solution space and a higher success rate in complex environments than a current Gaussian process based state-of-the-art trajectory optimization method, namely GPMP2, while having comparable execution time.
Figures

Reference graph
Works this paper leans on
-
[1]
Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,
L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, “Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,” IEEE transactions on Robotics and Automation , vol. 12, no. 4, pp. 566–580, 1996
work page 1996
-
[2]
S. M. LaValle, Planning algorithms. Cambridge university press, 2006
work page 2006
-
[3]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” The International Journal of Robotics Research , vol. 30, no. 7, pp. 846–894, 2011
work page 2011
-
[4]
Chomp: Gradient optimization techniques for efficient motion planning,
N. Ratliff, M. Zucker, J. A. Bagnell, and S. Srinivasa, “Chomp: Gradient optimization techniques for efficient motion planning,” in IEEE Int. Conf. on Robotics and Automation (ICRA) , 2009, pp. 489–494
work page 2009
-
[5]
Chomp: Covariant hamiltonian optimization for motion planning,
M. Zucker, N. Ratliff, A. D. Dragan, M. Pivtoraiko, M. Klingensmith, C. M. Dellin, J. A. Bagnell, and S. S. Srinivasa, “Chomp: Covariant hamiltonian optimization for motion planning,” The International Jour- nal of Robotics Research , vol. 32, no. 9-10, pp. 1164–1193, 2013
work page 2013
-
[6]
Stomp:stochastic trajectory optimization for motion planning,
M. Kalakrishnan, S. Chitta, E. Theodorou, P. Pastor, and S. Schaal, “Stomp:stochastic trajectory optimization for motion planning,” in IEEE Int. Conf. on Robotics and Automation (ICRA) , 2011, pp. 4569–4574
work page 2011
-
[7]
Finding locally optimal, collision-free trajectories with sequential con- vex optimization
J. Schulman, J. Ho, A. X. Lee, I. Awwal, H. Bradlow, and P. Abbeel, “Finding locally optimal, collision-free trajectories with sequential con- vex optimization.” in Robotics: Science and Systems , vol. 9, 2013
work page 2013
-
[8]
Motion planning with sequential convex optimization and convex collision checking,
J. Schulman, Y . Duan, J. Ho, A. Lee, I. Awwal, H. Bradlow, J. Pan, S. Patil, K. Goldberg, and P. Abbeel, “Motion planning with sequential convex optimization and convex collision checking,” The International Journal of Robotics Research , vol. 33, no. 9, pp. 1251–1270, 2014
work page 2014
-
[9]
Gaussian process motion plan- ning,
M. Mukadam, X. Yan, and B. Boots, “Gaussian process motion plan- ning,” in IEEE Int. Conf. on Robotics and Automation (ICRA) , 2016, pp. 9–15
work page 2016
-
[10]
Motion planning as probabilistic inference using gaussian processes and factor graphs,
J. Dong, M. Mukadam, F. Dellaert, and B. Boots, “Motion planning as probabilistic inference using gaussian processes and factor graphs,” in Robotics: Science and Systems , vol. 12, 2016
work page 2016
-
[11]
Motion planning with graph-based trajectories and gaussian process inference,
E. Huang, M. Mukadam, Z. Liu, and B. Boots, “Motion planning with graph-based trajectories and gaussian process inference,” in IEEE Int. Conf. on Robotics and Automation (ICRA) , 2017, pp. 5591–5598
work page 2017
-
[12]
Continuous-Time Gaussian Process Motion Planning via Probabilistic Inference
M. Mukadam, J. Dong, X. Yan, F. Dellaert, and B. Boots, “Continuous- time gaussian process motion planning via probabilistic inference,” arXiv preprint arXiv:1707.07383, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[13]
Factor graphs and gtsam: A hands-on introduction,
F. Dellaert, “Factor graphs and gtsam: A hands-on introduction,” Georgia Institute of Technology, Tech. Rep., 2012
work page 2012
-
[14]
R. Y . Rubinstein and D. P. Kroese, The cross-entropy method: a unified approach to combinatorial optimization, Monte-Carlo simulation and machine learning. Springer Science & Business Media, 2013
work page 2013
-
[15]
Batch continuous-time trajectory estimation as exactly sparse gaussian process regression
T. D. Barfoot, C. H. Tong, and S. Särkkä, “Batch continuous-time trajectory estimation as exactly sparse gaussian process regression.” in Robotics: Science and Systems , vol. 10, 2014
work page 2014
-
[16]
Batch nonlinear continuous-time trajectory estimation as exactly sparse gaussian process regression,
S. Anderson, T. D. Barfoot, C. H. Tong, and S. Särkkä, “Batch nonlinear continuous-time trajectory estimation as exactly sparse gaussian process regression,” Autonomous Robots, vol. 39, no. 3, pp. 221–238, 2015
work page 2015
-
[17]
Spatio-Temporal Multisensor Calibration Based on Gaussian Processes Moving Object Tracking
J. Persic, L. Petrovic, I. Markovic, and I. Petrovic, “Spatio-temporal multisensor calibration based on gaussian processes moving object tracking,” arXiv preprint arXiv:1904.04187 , 2019
work page internal anchor Pith review Pith/arXiv arXiv 1904
-
[18]
Simultaneous trajec- tory estimation and planning via probabilistic inference,
M. Mukadam, J. Dong, F. Dellaert, and B. Boots, “Simultaneous trajec- tory estimation and planning via probabilistic inference,” in Robotics: Science and Systems , 2017
work page 2017
-
[19]
Towards robust skill generalization: Unifying learning from demonstration and motion planning,
M. A. Rana, M. Mukadam, S. R. Ahmadzadeh, S. Chernova, and B. Boots, “Towards robust skill generalization: Unifying learning from demonstration and motion planning,” in Conference on Robot Learning, 2017, pp. 109–118
work page 2017
-
[20]
Manipulability Maximization Using Continuous-Time Gaussian Processes
F. Mari ´c, O. Limoyo, L. Petrovi ´c, I. Petrovi ´c, and J. Kelly, “Manipu- lability maximization using continuous-time gaussian processes,” arXiv preprint arXiv:1803.09493, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[21]
P. Larrañaga and J. A. Lozano, Estimation of distribution algorithms: A new tool for evolutionary computation . Springer Science & Business Media, 2001, vol. 2
work page 2001
-
[22]
Real-time optimization-based plan- ning in dynamic environments using gpus,
C. Park, J. Pan, and D. Manocha, “Real-time optimization-based plan- ning in dynamic environments using gpus,” in 2013 IEEE Int. Conf. on Robotics and Automation . IEEE, 2013, pp. 4090–4097
work page 2013
-
[23]
Sparse Gaussian Processes for Continuous-Time Trajectory Estimation on Matrix Lie Groups
J. Dong, B. Boots, and F. Dellaert, “Sparse gaussian processes for continuous-time trajectory estimation on matrix lie groups,” arXiv preprint arXiv:1705.06020, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[24]
Generating random spanning trees more quickly than the cover time,
D. B. Wilson, “Generating random spanning trees more quickly than the cover time,” in STOC, vol. 96. Citeseer, 1996, pp. 296–303
work page 1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.