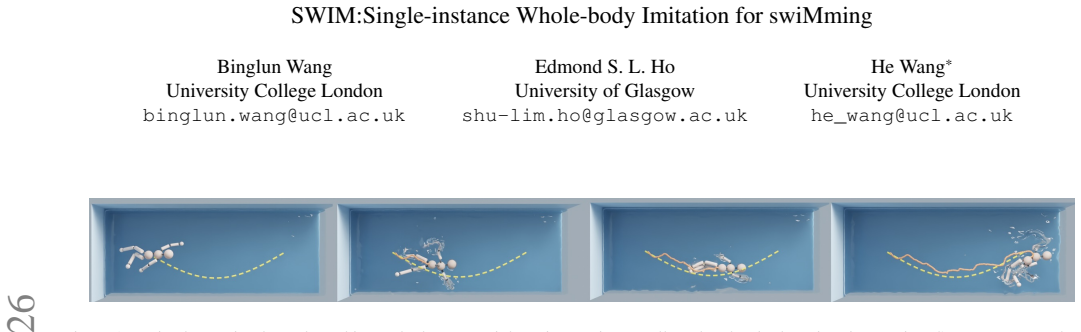
SWIM: Single-Instance Whole-Body Imitation for swiMming
Pith reviewed 2026-06-28 20:12 UTC · model grok-4.3
The pith
SWIM learns a swimming controller from one motion clip that generalizes to new bodies, styles, and fluid conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SWIM is a new imitation method for swimming motions, which can learn from a single swimming motion and generalize to unseen environments, body conditions, and swimming styles. The method addresses the challenges of volatile fluid forces, lack of reference data, and slow simulation by producing data-efficient, stable, robust, and generalizable control that outperforms alternatives on multiple tasks.
What carries the argument
Single-instance whole-body imitation that trains a policy directly from one motion clip to handle continuous fluid interactions.
If this is right
- Training for fluid-based motions becomes feasible with minimal reference data.
- The same controller works across varied body proportions without retraining.
- Control remains effective under disturbances that differ from the original motion.
- Simulation cost during training stays manageable even for full-body fluid tasks.
Where Pith is reading between the lines
- The single-clip approach could apply to other continuous-interaction domains such as flying or paddling.
- It suggests that explicit fluid modeling during policy search may be less necessary than previously assumed for generalization.
- Robotics applications might use the same imitation step to adapt virtual swimmers to real underwater hardware.
Load-bearing premise
A policy learned by imitating one motion clip remains stable when fluid forces change unpredictably without needing extra data or slower training.
What would settle it
Run the trained controller on a body shape or fluid viscosity far outside the single training clip and observe whether forward propulsion collapses or the character becomes unstable.
Figures

read the original abstract
We propose a new method for synthesizing physically-based swimming motions. Physically-based character animation aims to generate physically valid, controllable, and natural-looking motions which can respond to unexpected disturbances, where one dictating factor of difficulty is the complexity of the task, especially the level of sophistication of the required interactions with the environment. Existing research has succeeded in various tasks in static and dynamic environments. We push the difficulty further to swimming, which requires full-body coordination and continuous interactions with fluids, a new level of complexity when it comes to interacting with the environment. This complexity imposes challenges in learning control under volatile environmental forces, generalizing control to different environments and swimming styles, lack of data references, and prohibitively slow physical simulation which is inevitable during control learning. To this end, we propose SWIM, a new imitation method for swimming motions, which can learn from a single swimming motion and generalize to unseen environments, body conditions, and swimming styles. Extensive evaluation and comparison demonstrate that SWIM is data-efficient, stable, robust, and generalizable, outperforming alternative methods across multiple classes of tasks and metrics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SWIM, a single-instance imitation learning method for whole-body physically-based swimming animation. It claims to learn a policy from one reference motion clip that generalizes to unseen environments, body conditions, and swimming styles while remaining stable under volatile fluid forces, addressing data scarcity and slow simulation; extensive evaluations are said to show superiority over alternatives in data efficiency, stability, robustness, and generalization.
Significance. If the experimental claims are substantiated with quantitative evidence, the work would represent a meaningful advance in physically-based character animation by demonstrating data-efficient control for high-complexity fluid interactions, a domain where prior methods have been limited to simpler environments. The single-instance aspect, if achieved without hidden data augmentation or excessive simulation, would be a notable strength for tasks with prohibitive data or compute requirements.
major comments (2)
- [Abstract] Abstract: the central claim that a policy learned via imitation from one motion clip generalizes stably to unseen environments, bodies, and styles is asserted without any equations, architecture details, reward formulation, or experimental results (no tables, figures, or metrics). This mechanism is load-bearing for the generalization and stability assertions yet remains uninspectable from the provided text.
- [Abstract] Abstract: the statement that SWIM 'outperforms alternative methods across multiple classes of tasks and metrics' is made without reference to any specific baselines, quantitative scores, error bars, or statistical tests. This directly underpins the superiority claim and cannot be evaluated.
minor comments (1)
- [Abstract] The abstract lists four open challenges (volatile forces, generalization, lack of references, slow simulation) but does not indicate which components of SWIM (architecture, reward, randomization, or other) are intended to resolve each; a brief mapping would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the comments. The abstract is a concise summary per standard practice, with full technical details and results in the body of the paper. We address each point below and will make targeted revisions to the abstract for improved clarity.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that a policy learned via imitation from one motion clip generalizes stably to unseen environments, bodies, and styles is asserted without any equations, architecture details, reward formulation, or experimental results (no tables, figures, or metrics). This mechanism is load-bearing for the generalization and stability assertions yet remains uninspectable from the provided text.
Authors: Abstracts are intentionally high-level and do not contain equations or results to remain concise. The policy architecture, single-instance imitation objective, fluid-interaction reward formulation, and generalization mechanism are fully specified in Section 3 (Method), while stability and generalization results appear in Section 4. We will revise the abstract to add a brief clause indicating the core technical approach (e.g., “via a fluid-aware imitation objective and domain-randomized policy”) and a pointer to the detailed sections. revision: yes
-
Referee: [Abstract] Abstract: the statement that SWIM 'outperforms alternative methods across multiple classes of tasks and metrics' is made without reference to any specific baselines, quantitative scores, error bars, or statistical tests. This directly underpins the superiority claim and cannot be evaluated.
Authors: The superiority claim summarizes the quantitative comparisons presented in Section 4, which include specific baselines (standard RL, prior imitation methods, and ablations), success rates, stability metrics, and generalization errors with error bars across multiple random seeds and statistical significance tests. We will revise the abstract to reference these evaluations more explicitly (e.g., “outperforming baselines in Section 4 across …”) while respecting length constraints. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The provided abstract and context describe a proposed imitation-learning method for swimming animation that learns from one motion clip and generalizes via evaluation. No equations, fitted parameters renamed as predictions, self-citation chains, or ansatzes are present that would reduce any claim to its own inputs by construction. The central assertions rest on empirical comparisons rather than definitional or fitted reductions, satisfying the default expectation for a non-circular method paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
An introduction to physics-based animation
Adam W Bargteil, Tamar Shinar, and Paul G Kry. An introduction to physics-based animation. InSIGGRAPH Asia 2020 Courses, pages 1–57. 2020
2020
-
[2]
DeepMimic: example-guided deep reinforcement learning of physics-based character skills.ACM Transactions on Graphics, 37(4):1–14, 2018
Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel Van De Panne. DeepMimic: example-guided deep reinforcement learning of physics-based character skills.ACM Transactions on Graphics, 37(4):1–14, 2018
2018
-
[3]
Charles River Media Hingham, 2005
Kenny Erleben, Jon Sporring, Knud Henriksen, and Henrik Dohlmann.Physics-based animation, volume 79. Charles River Media Hingham, 2005
2005
-
[4]
Physics-based character animation and human motor control.Physics of Life Reviews, 46:190–219, 2023
Joan Llobera and Caecilia Charbonnier. Physics-based character animation and human motor control.Physics of Life Reviews, 46:190–219, 2023
2023
-
[5]
Masmitja, M
I. Masmitja, M. Martin, T. O’Reilly, B. Kieft, N. Palomeras, J. Navarro, and K. Katija. Dynamic robotic tracking of under- water targets using reinforcement learning.Science Robotics, 8(80):eade7811, 2023
2023
-
[6]
Learning coordinated badminton skills for legged manipu- lators.Science Robotics, 10(102):eadu3922, 2025
Yuntao Ma, Andrei Cramariuc, Farbod Farshidian, and Marco Hutter. Learning coordinated badminton skills for legged manipu- lators.Science Robotics, 10(102):eadu3922, 2025
2025
-
[7]
Robie, Carmen Morrow, Guido Novati, Zinovia Stefanidi, Gert-Jan Both, Gwyneth M
Roman Vaxenburg, Igor Siwanowicz, Josh Merel, Alice A. Robie, Carmen Morrow, Guido Novati, Zinovia Stefanidi, Gert-Jan Both, Gwyneth M. Card, Michael B. Reiser, Matthew M. Botvinick, Kristin M. Branson, Yuval Tassa, and Srinivas C. Turaga. Whole- body physics simulation of fruit fly locomotion.Nature, 2025
2025
-
[8]
Spacetime constraints.ACM Siggraph Computer Graphics, 22(4):159–168, 1988
Andrew Witkin and Michael Kass. Spacetime constraints.ACM Siggraph Computer Graphics, 22(4):159–168, 1988
1988
-
[9]
University of California, Los Angeles, 2013
Weiguang Si.Realistic simulation and control of human swimming and underwater movement. University of California, Los Angeles, 2013
2013
-
[10]
Sim- bicon: Simple biped locomotion control.ACM Transactions on Graphics (TOG), 26(3):105–es, 2007
KangKang Yin, Kevin Loken, and Michiel Van de Panne. Sim- bicon: Simple biped locomotion control.ACM Transactions on Graphics (TOG), 26(3):105–es, 2007
2007
-
[11]
Xue Bin Peng. Mimickit: A reinforcement learning framework for motion imitation and control.arXiv preprint arXiv:2510.13794, 2025
-
[12]
1000 layer networks for self- supervised rl: Scaling depth can enable new goal-reaching ca- pabilities.Advances in Neural Information Processing Systems, 38:157643–157670, 2026
Kevin Wang, Ishaan Javali, Michał Bortkiewicz, Tomasz Trzcin- ski, and Benjamin Eysenbach. 1000 layer networks for self- supervised rl: Scaling depth can enable new goal-reaching ca- pabilities.Advances in Neural Information Processing Systems, 38:157643–157670, 2026
2026
-
[13]
Composite motion learning with task control.ACM Transactions on Graphics, 42(4):1–16, 2023
Pei Xu, Xiumin Shang, Victor Zordan, and Ioannis Karamouzas. Composite motion learning with task control.ACM Transactions on Graphics, 42(4):1–16, 2023
2023
-
[14]
Karen Liu, Julien Pettré, Michiel van de Panne, and Marie- Paule Cani
Ariel Kwiatkowski, Eduardo Alvarado, Vicky Kalogeiton, C. Karen Liu, Julien Pettré, Michiel van de Panne, and Marie- Paule Cani. A survey on reinforcement learning methods in charac- ter animation.Computer Graphics Forum, 41(2):613–639, 2022
2022
-
[15]
Learning to schedule control fragments for physics-based characters using deep q-learning
Libin Liu and Jessica Hodgins. Learning to schedule control fragments for physics-based characters using deep q-learning. ACM Transactions on Graphics, 36(3):1–14, 2017
2017
-
[16]
Drecon: data-driven responsive control of physics-based characters.ACM Transactions On Graphics (TOG), 38(6):1–11, 2019
Kevin Bergamin, Simon Clavet, Daniel Holden, and James Richard Forbes. Drecon: data-driven responsive control of physics-based characters.ACM Transactions On Graphics (TOG), 38(6):1–11, 2019
2019
-
[17]
ASE: large-scale reusable adversarial skill embed- dings for physically simulated characters.ACM Transactions on Graphics, 41(4):1–17, 2022
Xue Bin Peng, Yunrong Guo, Lina Halper, Sergey Levine, and Sanja Fidler. ASE: large-scale reusable adversarial skill embed- dings for physically simulated characters.ACM Transactions on Graphics, 41(4):1–17, 2022
2022
-
[18]
Deeploco: Dynamic locomotion skills using hierarchi- cal deep reinforcement learning.Acm transactions on graphics (tog), 36(4):1–13, 2017
Xue Bin Peng, Glen Berseth, KangKang Yin, and Michiel Van De Panne. Deeploco: Dynamic locomotion skills using hierarchi- cal deep reinforcement learning.Acm transactions on graphics (tog), 36(4):1–13, 2017
2017
-
[19]
Sfv: Reinforcement learning of physical skills from videos.ACM Transactions On Graphics (TOG), 37(6):1–14, 2018
Xue Bin Peng, Angjoo Kanazawa, Jitendra Malik, Pieter Abbeel, and Sergey Levine. Sfv: Reinforcement learning of physical skills from videos.ACM Transactions On Graphics (TOG), 37(6):1–14, 2018
2018
-
[20]
AMP: Adversarial motion priors for stylized physics- based character control.ACM Transactions on Graphics, 40(4), 2021
Xue Bin Peng, Ze Ma, Pieter Abbeel, Sergey Levine, and Angjoo Kanazawa. AMP: Adversarial motion priors for stylized physics- based character control.ACM Transactions on Graphics, 40(4), 2021
2021
-
[21]
Physics-based motion imitation with adversarial differential discriminators
Ziyu Zhang, Sergey Bashkirov, Dun Yang, Yi Shi, Michael Tay- lor, and Xue Bin Peng. Physics-based motion imitation with adversarial differential discriminators. InSIGGRAPH Asia 2025 Conference Papers (SIGGRAPH Asia ’25 Conference Papers), 2025
2025
-
[22]
Hierarchical visuomotor control of humanoids
Josh Merel, Arun Ahuja, Vu Pham, Saran Tunyasuvunakool, Siqi Liu, Dhruva Tirumala, Nicolas Heess, and Greg Wayne. Hierarchical visuomotor control of humanoids.arXiv preprint arXiv:1811.09656, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[23]
MaskedMimic: Unified physics-based charac- ter control through masked motion inpainting.ACM Transactions on Graphics, 43(6):1–21, 2024
Chen Tessler, Yunrong Guo, Ofir Nabati, Gal Chechik, and Xue Bin Peng. MaskedMimic: Unified physics-based charac- ter control through masked motion inpainting.ACM Transactions on Graphics, 43(6):1–21, 2024
2024
-
[24]
Allsteps: curriculum-driven learning of stepping stone skills
Zhaoming Xie, Hung Yu Ling, Nam Hee Kim, and Michiel Van De Panne. Allsteps: curriculum-driven learning of stepping stone skills. InComputer Graphics Forum, volume 39, pages 213–224. Wiley Online Library, 2020
2020
-
[25]
Blind bipedal stair traversal via sim-to-real reinforcement learning,
Jonah Siekmann, Kevin Green, John Warila, Alan Fern, and Jonathan Hurst. Blind bipedal stair traversal via sim-to-real rein- forcement learning.arXiv preprint arXiv:2105.08328, 2021
-
[26]
Learning to use chop- sticks in diverse gripping styles.ACM Transactions on Graphics, 41(4):1–17, 2022
Zeshi Yang, Kangkang Yin, and Libin Liu. Learning to use chop- sticks in diverse gripping styles.ACM Transactions on Graphics, 41(4):1–17, 2022
2022
-
[27]
SkillMimic: Learning basketball interaction skills from demonstrations, 2025
Yinhuai Wang, Qihan Zhao, Runyi Yu, Hok Wai Tsui, Ailing Zeng, Jing Lin, Zhengyi Luo, Jiwen Yu, Xiu Li, Qifeng Chen, Jian Zhang, Lei Zhang, and Ping Tan. SkillMimic: Learning basketball interaction skills from demonstrations, 2025
2025
-
[28]
Learning basketball dribbling skills using trajectory optimization and deep reinforcement learn- ing.ACM Transactions on Graphics, 37(4):1–14, 2018
Libin Liu and Jessica Hodgins. Learning basketball dribbling skills using trajectory optimization and deep reinforcement learn- ing.ACM Transactions on Graphics, 37(4):1–14, 2018
2018
-
[29]
Learning physically simulated tennis skills from broadcast videos.ACM Transactions on Graphics, 42(4):1–14, 2023
Haotian Zhang, Ye Yuan, Viktor Makoviychuk, Yunrong Guo, Sanja Fidler, Xue Bin Peng, and Kayvon Fatahalian. Learning physically simulated tennis skills from broadcast videos.ACM Transactions on Graphics, 42(4):1–14, 2023. 10
2023
-
[30]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Viktor Makoviychuk, Lukasz Wawrzyniak, Yunrong Guo, Michelle Lu, Kier Storey, Miles Macklin, David Hoeller, Nikita Rudin, Arthur Allshire, Ankur Handa, et al. Isaac gym: High per- formance gpu-based physics simulation for robot learning.arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[31]
C Daniel Freeman, Erik Frey, Anton Raichuk, Sertan Girgin, Igor Mordatch, and Olivier Bachem. Brax–a differentiable physics engine for large scale rigid body simulation.arXiv preprint arXiv:2106.13281, 2021
-
[32]
Neural state machine for character-scene interactions.ACM Transactions on Graphics, 38(6):178, 2019
Sebastian Starke, He Zhang, Taku Komura, and Jun Saito. Neural state machine for character-scene interactions.ACM Transactions on Graphics, 38(6):178, 2019
2019
-
[33]
Lo- cal motion phases for learning multi-contact character movements
Sebastian Starke, Yiwei Zhao, Taku Komura, and Kazi Zaman. Lo- cal motion phases for learning multi-contact character movements. ACM Transactions on Graphics, 39(4), 2020
2020
-
[34]
Elastomonolith: A monolithic optimization-based liquid solver for contact-aware elastic-solid coupling.ACM Transactions on Graphics (TOG), 41(6):1–19, 2022
Tetsuya Takahashi and Christopher Batty. Elastomonolith: A monolithic optimization-based liquid solver for contact-aware elastic-solid coupling.ACM Transactions on Graphics (TOG), 41(6):1–19, 2022
2022
-
[35]
Eulerian solid- fluid coupling.ACM Transactions on Graphics (TOG), 35(6):1–8, 2016
Yun Teng, David IW Levin, and Theodore Kim. Eulerian solid- fluid coupling.ACM Transactions on Graphics (TOG), 35(6):1–8, 2016
2016
-
[36]
Interlinked SPH pressure solvers for strong fluid-rigid coupling.ACM Transactions on Graphics, 38(1):1–13, 2019
Christoph Gissler, Andreas Peer, Stefan Band, Jan Bender, and Matthias Teschner. Interlinked SPH pressure solvers for strong fluid-rigid coupling.ACM Transactions on Graphics, 38(1):1–13, 2019
2019
-
[37]
IQ-MPM: an interface quadra- ture material point method for non-sticky strongly two-way cou- pled nonlinear solids and fluids.ACM Transactions on Graphics, 39(4), 2020
Yu Fang, Ziyin Qu, Minchen Li, Xinxin Zhang, Yixin Zhu, Mridul Aanjaneya, and Chenfanfu Jiang. IQ-MPM: an interface quadra- ture material point method for non-sticky strongly two-way cou- pled nonlinear solids and fluids.ACM Transactions on Graphics, 39(4), 2020
2020
-
[38]
Monolith: a monolithic pressure-viscosity-contact solver for strong two-way rigid-rigid rigid-fluid coupling.ACM Transactions on Graphics, 39(6):1–16, 2020
Tetsuya Takahashi and Christopher Batty. Monolith: a monolithic pressure-viscosity-contact solver for strong two-way rigid-rigid rigid-fluid coupling.ACM Transactions on Graphics, 39(6):1–16, 2020
2020
-
[39]
Learning to simulate complex physics with graph networks
Alvaro Sanchez-Gonzalez, Jonathan Godwin, Tobias Pfaff, Rex Ying, Jure Leskovec, and Peter Battaglia. Learning to simulate complex physics with graph networks. InInternational conference on machine learning, pages 8459–8468. PMLR, 2020
2020
-
[40]
CFC: Simulating character-fluid coupling using a two- level world model.ACM Transactions on Graphics, 44(6):1–17, 2025
Zhiyang Dou, Chen Peng, Xinyu Lu, Xiaohan Ye, Lixing Fang, Yuan Liu, Wenping Wang, Chuang Gan, Lingjie Liu, and Taku Komura. CFC: Simulating character-fluid coupling using a two- level world model.ACM Transactions on Graphics, 44(6):1–17, 2025
2025
-
[41]
Proximal policy optimization algorithms, 2017
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms, 2017
2017
-
[42]
Pybullet gymperium
Benjamin Ellenberger. Pybullet gymperium. https:// github.com/benelot/pybullet-gym, 2018–2019
2018
-
[43]
SPlisHSPlasH Library
Jan Bender et al. SPlisHSPlasH Library
-
[44]
Layered dynamic control for interactive character swimming
Po-Feng Yang, Joe Laszlo, and Karan Singh. Layered dynamic control for interactive character swimming. InProceedings of the 2004 ACM SIGGRAPH/Eurographics symposium on Com- puter animation - SCA ’04, page 39. ACM Press, 2004. ISSN: 17275288
2004
-
[45]
Karen Liu
Jie Tan, Yuting Gu, Greg Turk, and C. Karen Liu. Articulated swimming creatures. InACM SIGGRAPH 2011 papers, pages 1–12. ACM, 2011
2011
-
[46]
Kwatra, C
N. Kwatra, C. Wojtan, M. Carlson, I.A. Essa, P.J. Mucha, and G. Turk. Fluid simulation with articulated bodies.IEEE Trans- actions on Visualization and Computer Graphics, 16(1):70–80, 2010
2010
-
[47]
Realistic biomechanical simulation and control of hu- man swimming.ACM Transactions on Graphics, 34(1):1–15, 2014
Weiguang Si, Sung-Hee Lee, Eftychios Sifakis, and Demetri Ter- zopoulos. Realistic biomechanical simulation and control of hu- man swimming.ACM Transactions on Graphics, 34(1):1–15, 2014
2014
-
[48]
Creat- ing fluid-interactive virtual agents by an efficient simulator with local-domain control.ACM Transactions on Graphics (SIG- GRAPH 2025), 2025
Wenbin Song, Heng Zhang, Yang Wang, and Xiaopei Liu. Creat- ing fluid-interactive virtual agents by an efficient simulator with local-domain control.ACM Transactions on Graphics (SIG- GRAPH 2025), 2025. Accepted for publication. A video clip was selected for the Technical Papers Trailer
2025
-
[49]
Sethuraman, Yiting Zhang, and Katherine A
Jingyu Song, Haoyu Ma, Onur Bagoren, Advaith V . Sethuraman, Yiting Zhang, and Katherine A. Skinner. OceanSim: A GPU- accelerated underwater robot perception simulation framework, 2025
2025
-
[50]
Petillot, and Canjun Yang
Shuguang Chu, Zebin Huang, Yutong Li, Mingwei Lin, Ignacio Carlucho, Yvan R. Petillot, and Canjun Yang. MarineGym: A high-performance reinforcement learning platform for underwater robotics, 2025
2025
-
[51]
Karen Liu
Pei Xu, Yufei Ye, Shuchun Sun, Yu Ding, Elizabeth Schumann, and C. Karen Liu. MUSIC: Learning muscle-driven dexterous hand control. volume 45. ACM New York, NY , USA, 2026
2026
-
[52]
ControlV AE: Model-based learning of generative controllers for physics-based characters.ACM Transactions on Graphics, 41(6):1–16, 2022
Heyuan Yao, Zhenhua Song, Baoquan Chen, and Libin Liu. ControlV AE: Model-based learning of generative controllers for physics-based characters.ACM Transactions on Graphics, 41(6):1–16, 2022
2022
-
[53]
MoConVQ: Unified physics-based motion control via scalable discrete representations, 2023
Heyuan Yao, Zhenhua Song, Yuyang Zhou, Tenglong Ao, Bao- quan Chen, and Libin Liu. MoConVQ: Unified physics-based motion control via scalable discrete representations, 2023
2023
-
[54]
Next generation computer animation techniques, 2017
2017
-
[55]
Creature control in a fluid environment.IEEE Transactions on Visualization and Computer Graphics, 17(5):682– 693, 2011
M Lentine, J T Gretarsson, C Schroeder, A Robinson-Mosher, and R Fedkiw. Creature control in a fluid environment.IEEE Transactions on Visualization and Computer Graphics, 17(5):682– 693, 2011
2011
-
[56]
Physics-based fluid simulation in computer graphics: Survey, research trends, and challenges.Computational Visual Media, 10(5):803–858, 2024
Xiaokun Wang, Yanrui Xu, Sinuo Liu, Bo Ren, Jirí Kosinka, Alexandru C Telea, Jiamin Wang, Chongming Song, Jian Chang, Chenfeng Li, et al. Physics-based fluid simulation in computer graphics: Survey, research trends, and challenges.Computational Visual Media, 10(5):803–858, 2024
2024
-
[57]
Smoothed particle hydrodynamics techniques for the physics based simulation of fluids and solids.Eurographics 2019 - Tutorials, page 41 pages, 2019
Dan Koschier, Jan Bender, Barbara Solenthaler, and Matthias Teschner. Smoothed particle hydrodynamics techniques for the physics based simulation of fluids and solids.Eurographics 2019 - Tutorials, page 41 pages, 2019
2019
-
[58]
Neu- ral monte carlo fluid simulation
Pranav Jain, Ziyin Qu, Peter Yichen Chen, and Oded Stein. Neu- ral monte carlo fluid simulation. InSpecial Interest Group on Computer Graphics and Interactive Techniques Conference Con- ference Papers, pages 1–11. ACM, 2024. 11
2024
-
[59]
Raissi, P
M. Raissi, P. Perdikaris, and G.E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equa- tions.Journal of Computational Physics, 378:686–707, 2019. Publisher: Elsevier BV
2019
-
[60]
Physics-based deep learning.arXiv preprint arXiv:2109.05237, 2021
Nils Thuerey, Philipp Holl, Maximilian Mueller, Patrick Schnell, Felix Trost, and Kiwon Um. Physics-based deep learning.arXiv preprint arXiv:2109.05237, 2021
-
[61]
Weak baselines and report- ing biases lead to overoptimism in machine learning for fluid- related partial differential equations.Nature machine intelligence, 6(10):1256–1269, 2024
Nick McGreivy and Ammar Hakim. Weak baselines and report- ing biases lead to overoptimism in machine learning for fluid- related partial differential equations.Nature machine intelligence, 6(10):1256–1269, 2024
2024
-
[62]
Divergence-free smoothed particle hydrodynamics
Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. InProceedings of the 14th ACM SIGGRAPH / Eurographics Symposium on Computer Animation, pages 147–
-
[63]
Versatile rigid-fluid coupling for incompressible SPH.ACM Transactions on Graphics, 31(4):1–8, 2012
Nadir Akinci, Markus Ihmsen, Gizem Akinci, Barbara Solen- thaler, and Matthias Teschner. Versatile rigid-fluid coupling for incompressible SPH.ACM Transactions on Graphics, 31(4):1–8, 2012
2012
-
[64]
Underwater soft robot modeling and control with differentiable simulation.IEEE Robotics and Automation Letters, 6(3):4994–5001, 2021
Tao Du, Josie Hughes, Sebastien Wah, Wojciech Matusik, and Daniela Rus. Underwater soft robot modeling and control with differentiable simulation.IEEE Robotics and Automation Letters, 6(3):4994–5001, 2021
2021
-
[65]
Reinforce- ment learning control for the swimming motions of a beaver-like, single-legged robot based on biological inspiration.Robotics and Autonomous Systems, 154:104116, 2022
Gang Chen, Yuwang Lu, Xin Yang, and Huosheng Hu. Reinforce- ment learning control for the swimming motions of a beaver-like, single-legged robot based on biological inspiration.Robotics and Autonomous Systems, 154:104116, 2022
2022
-
[66]
Unified motion planner for fishes with various swimming styles.ACM Transactions on Graphics (TOG), 35(4):1–15, 2016
Daiki Satoi, Mikihiro Hagiwara, Akira Uemoto, Hisanao Nakadai, and Junichi Hoshino. Unified motion planner for fishes with various swimming styles.ACM Transactions on Graphics (TOG), 35(4):1–15, 2016
2016
-
[67]
DiffFR: Differentiable SPH-based fluid-rigid coupling for rigid body control.ACM Transactions on Graphics, 42(6):1–17, 2023
Zhehao Li, Qingyu Xu, Xiaohan Ye, Bo Ren, and Ligang Liu. DiffFR: Differentiable SPH-based fluid-rigid coupling for rigid body control.ACM Transactions on Graphics, 42(6):1–17, 2023
2023
-
[68]
Binglun Wang, Niladri Shekhar Dutt, and Niloy J. Mitra. Pro- teusNeRF: Fast lightweight NeRF editing using 3d-aware image context.Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(1):1–17, 2024
2024
-
[69]
Erwin Coumans.PyBullet Physics SDK, 2021
2021
-
[70]
Kry, Michael Neff, Morgan McGuire, Ioannis Karamouzas, and Victor Zordan
Pei Xu, Kaixiang Xie, Sheldon Andrews, Paul G. Kry, Michael Neff, Morgan McGuire, Ioannis Karamouzas, and Victor Zordan. AdaptNet: Policy adaptation for physics-based character control. ACM Transactions on Graphics, 42(6):1–17, 2023
2023
-
[71]
Siddharth Mysore, Bassel Mabsout, Kate Saenko, and Renato Mancuso. How to train your quadrotor: A framework for con- sistently smooth and responsive flight control via reinforcement learning.ACM Transactions on Cyber-Physical Systems (TCPS), 5(4):1–24, 2021
2021
-
[72]
Body roll in swim- ming: A review.Journal of Sports Sciences, 28(3):229–236, 2010
Stelios G Psycharakis and Ross H Sanders. Body roll in swim- ming: A review.Journal of Sports Sciences, 28(3):229–236, 2010
2010
-
[73]
Fernandes, and João Paulo Vilas-Boas
Phornpot Chainok, Karla De Jesus, Luis Mourão, Pedro Fil- ipe Pereira Fonseca, Rodrigo Zacca, Ricardo J. Fernandes, and João Paulo Vilas-Boas. Biomechanical features of backstroke to breaststroke transition techniques in age-group swimmers.Fron- tiers in Sports and Active Living, 4:802967, 2022
2022
-
[74]
Addressing function approximation error in actor-critic methods
Scott Fujimoto, Herke van Hoof, and David Meger. Addressing function approximation error in actor-critic methods. InProceed- ings of the 35th International Conference on Machine Learning (ICML), pages 1587–1596, 2018
2018
-
[75]
Current edition: 2017; last stand-alone edition, consolidated into NFPA 2500
National Fire Protection Association, Quincy, MA.NFPA 1670: Standard on Operations and Training for Technical Search and Rescue Incidents, 2017. Current edition: 2017; last stand-alone edition, consolidated into NFPA 2500. 12
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.